基于農業搬運機器人的障礙物視覺識別技術研究*
2024-01-13 08:09:16孫小春
南方農機 2024年2期
余 娜 ,晁 陽 ,孫小春 ,卿 笛
(楊凌職業技術學院,陜西 咸陽 712100)
農業搬運機器人是農業現代化發展的必然產物,機器人在運輸過程中需要多個傳感器協作完成障礙物識別的搬運過程。為了有效提升機器人故障檢測和識別的性能,需要充分利用現代軟件計算的優勢,采集障礙物的表征信息,為機器識別提供檢測依據。為了有效提升障礙物表征信息采集的準確性和精細性,課題組基于障礙物圖像檢索的方法開發了一種機器視覺障礙物特征提取優化系統[1]。將數據庫中采集到的圖像特征進行表示后,通過相似度測量,可提升障礙物識別的精確性。基于當前搬運機器人障礙物檢測的研究現狀,即采用單目視覺處理的方法進行障礙物識別、機器人自主定位與障礙物檢測,將檢測的障礙物信息插入采集的障礙物特征地圖中,從而實現搬運機器人自主定位和自動檢測的效果。文章在當前研究的基礎上,利用內容圖像檢索(CBIR,Content Based Image Retrieval)方法優化搬運機器人障礙物圖像檢測性能,并且通過實驗檢測了機器人在運行過程中對故障識別的有效性[2]。
1 CBIR系統優化設計
搬運機器人的CBIR 系統主要是依靠現代機器視覺等技術實現障礙物圖像數據的采集和傳輸處理。將采集的障礙物圖像數據發送到控制服務器中,保障障礙物信息的準確采集和管理。采集意向信息之后,機器人的機器視覺識別系統在運行過程中不斷進行圖像捕捉,并向外界展示障礙物的實際信息,為后續其他處理做準備[3]。基于此,為了有效檢索匹配采集的圖像,對機器人的CBIR 系統進行優化,CBIR 系統優化結構圖如圖1所示。
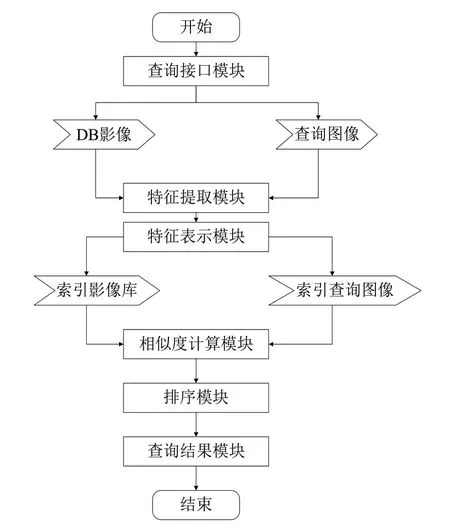
圖1 CBIR 系統優化結構圖
為了提升固體障礙物識別功能,需要確保機器視覺采集的圖像數量和質量。該系統構建了多方位障礙物圖像信息采集攝像頭,可將采集的圖像與數據庫中的圖像特征進行對比,文中的數據庫留存了搬運機器人搬運路徑途中的固體障礙物圖像,并且將多個角度采集到的圖像進行了編號[4]。同時,為了方便處理,系統將采集到的RGB 圖像轉換為灰度圖像,通過優化后的距離度量方法來減少檢索過程誤差。目前常用的距離度量方法有巴特查里亞、余弦、歐幾里德、卡方等集中計算方法,而文章中優化的CBIR 系統采用的方法是對圖像間的最小距離進行度量并排名,計算獲得的結果可以用于對比分析檢測圖像與數據庫圖像。
2 障礙物邊緣特征提取優化
2.1 障礙物邊緣特征提取概述
搬運機器人的搬運路徑在進行障礙物的邊緣特征提取之前,需要去除不符合障礙物邊緣的其他干擾特征。在提取障礙物邊緣特征時,對圖像進行預處理,避免圖像檢測在各種不同的外部條件和隨機干擾的環境下,導致機器視覺識別系統采集的圖像產生噪聲和圖像失真的情況,從而影響視覺系統的精確性。首先需要對采集圖像進行對比度增強,提升圖像的平滑性。而障礙物的邊緣特征圖像采集有著不連續性局部特征的特點,不規則的局部特征是局部亮度變化最大的圖像部分[5]。通常來說,在捕捉障礙物的場景圖像之后,經過一系列的紋理特征提取就可以提取出邊緣輪廓。這些輪廓對搬運機器人運行路徑中的障礙物識別和定位具有重要的作用。
為了優化檢測邊緣性能,采用基于邊緣圖像像素的灰度級差異方法,提取圖像的輪廓,通過將圖像邊緣所包裹的像素清空,并且保留圖像的輪廓。邊緣檢測算法通過四個維度算子優化圖像強度的一階數和二階數,改善圖像噪聲邊緣效率。同時,需要增強障礙物輪廓點邊緣強度的變化,并且通過圖像檢測和位置檢測,確定障礙物邊緣檢測的精細度[6]。
2.2 固體障礙物特征提取算法2.2.1檢測低噪聲圖像邊緣算法
為了檢測采集圖像的低噪聲邊緣,利用Gabor 小波濾波提升噪聲檢測邊緣的效率,進一步提高邊緣檢測的分辨率。該算法通過短期傅里葉變換與高斯窗口結合,并且通過Gabor 濾波器過濾采集圖像的紋理進行數字信號變換,進而提升障礙物識別的精確度。Gabor 小波濾波器數字信號轉換的方法為:
其中,s(t)表示數字信號;(b,a)分別表示的是轉化因子和膨脹因子;h(t)表示基本小波[7]。
小波濾波器將信號s(t)分解為小波函數集,并且通過轉化因子及膨脹因子在時空域及頻域中提升圖像的分辨率。小波濾波器的二維函數為:其中,φ 表示高斯分布在x 軸及y 軸方向的變體;ω0表示正弦曲線的頻率;θ 則表示正弦曲線的方向。
該函數表現形式體現了Gabor 基本函數表征為一個二維的高斯,通過該頻率范圍值以及方向為θ 的正弦曲線的包圍和調制功能來確定濾波器的參數。由于掩碼尺寸的大小會影響圖像檢索的精度,因此需要以適合的濾波器大小來確定障礙物的位置[8]。根據該基本函數選定的濾波組件來構建空間域濾波器,并且濾波器的每對元素可以通過正弦曲線的實部和虛部實現優化。在同一中頻級過濾時,濾波器的輸出是對圖像中所有卷積像素的虛實濾波器掩碼平均卷積進行輸出調節,其計算公式為:
其中,ζ 表示濾波器輸出調節的大小;Rave表示Gabor濾波器掩碼對圖像區域進行卷積的結果;Iave是利用濾波器虛掩碼對圖像區域進行卷積的結果。
綜上,利用Gabor 濾波器進行圖像特征提取,提升搬運機器人在運輸過程中對障礙物形狀和位置的評估和定位精確度,以提高搬運機器人運輸的高效性[9]。
2.2.2 評估方法
通過濾波器將采集的圖像進行數字編碼,為算法計算提供數據支持,并為后期圖像噪聲消除、提升采集圖像質量提供強有力的支持。為了檢測該方法對搬運機器人運輸的有效性,在文章的CBIR 系統中設定5 種距離,將這5 種距離分為低、中、滿、淹沒和溢出5 種情況。將Gabor 小波濾波器采集的障礙物圖像通過數字轉化之后,將該數據與系統數據庫中的障礙物圖像進行檢索對比,從而獲取構建的CBIR 系統對障礙物識別的精細度和準確性[10]。
主要采用準確率和召回率的加權調和平均數進行比較的方法,與采集圖像的檢索數量和質量進行對比,從而檢測系統利用Gabor 濾波器對障礙物圖像邊緣檢測的有效性,有效提升搬運機器人的視覺識別系統性能。通過公式(4)、公式(5)、公式(6)可以分別計算出系統的準確率、召回率以及F1 測度。
其中,R 表示召回率,na表示檢索出相關圖像的數量;nb表示數據庫中相關圖像的數量;A表示準確率;nall表示檢索圖像的總數[11]。
3 CBIR系統優化實驗結果
為了驗證CBIR 系統對搬運機器人障礙物識別的精確度,利用MATLAB 仿真平臺對該系統性能進行仿真實驗,將200 個障礙物圖像邊緣檢測精確度進行對比。經過仿真實驗,幾種相似度距離的檢索率如表1所示。
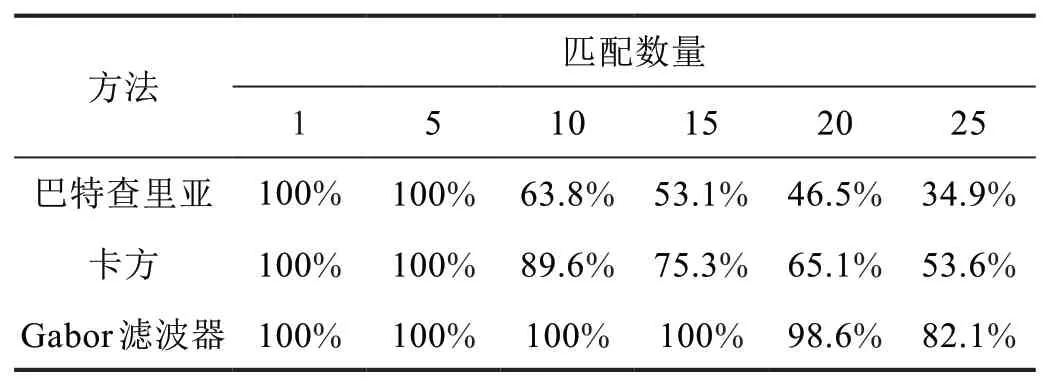
表1 不同方法下的障礙物機器視覺識別檢索率對比
從表1 可以看出,文章利用小波濾波器優化的CBIR 系統的對比結果優于其他方法的平均檢索率,甚至在過濾器到障礙物距離的測算中,前20 張圖像之間的檢索率均保持在98%以上。該方法有效提升了CBIR 系統的性能,并且促使搬運機器人在不同位置下均可以對運輸路徑上存在的固體障礙物進行定位識別,有效提升其識別系統的精確度,為系統數據庫中障礙物圖像特征對比提供高質量圖像數據。
4 結語
綜上所述,為了提升當前農業現代化發展過程中搬運機器人的故障識別和檢測CBIR 系統性能,課題組從提升障礙物圖像采集的數量和質量入手,使用Gabor 小波濾波器對采集圖像的邊緣信息進行數字化采集,以優化采集圖像的質量,提升采集圖像與數據庫圖像對比效果的準確性。同時,以MATLAB平臺為仿真工具,與其他邊緣檢測特征提取方法進行對比,即將文章優化的CBIR 系統的度量方法得到的距離結果與其他邊緣檢測特征提取方法得到的距離結果進行對比。并且根據平均檢索率對采集的圖像數量和質量進行比較發現,農業搬運機器人在復雜的工作環境下,也可以保障采集的圖像與數據庫中的每張圖像實現精細的特征提取,確保采集圖像與數據庫的圖像可以進行相似度對比。總的來說,文章優化的CBIR 系統可以對障礙物圖像的紋理特征進行精細化提取,并且在不同距離下均具有良好的障礙物檢測性能。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
電子制作(2019年15期)2019-08-27 01:12:00
財經(2017年2期)2017-03-10 14:35:35
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
財經(2016年15期)2016-06-03 07:38:02
海峽科技與產業(2016年3期)2016-05-17 04:32:12
財經(2016年3期)2016-03-07 07:44:46
財經(2016年6期)2016-02-24 07:41:51