基于DBL的紅外分光計通道定標模型研究
2024-01-17 00:00:00宋子琛莫靖宇何家偉袁鑫攀
企業科技與發展 2024年12期
關鍵詞:人工智能

摘要:紅外分光計是工業制造領域的重要光學儀器,用于探測地表至40 km高的大氣層發射的紅外光。確保紅外分光計性能的關鍵在于其定標過程的精準性。然而,現階段國產紅外分光計設備的定標精度相較于國際標準仍存在差距。針對此問題,文章提出了一種基于DBL(雙分支線性)的通道定標模型,旨在通過與國際數據進行對比,提升紅外分光計的定標精度和可靠性。DBL模型通過改進現有定標模型,實現了對線性與非線性信息的同步學習,增強了模型的信息捕獲能力。實驗結果表明,該DBL模型在提升紅外分光計定標精度方面成效顯著,為實現高精度的氣象監測提供了新的思路和技術支持。
關鍵詞:人工智能;DBL;紅外分光計; 通道定標
中圖分類號:TP391;TH74" " " "文獻標識碼:A" " " 文章編號:1674-0688(2024)12-0001-05
0 引言
在現代分析化學和材料科學領域,紅外分光計(IRAS)作為一種光譜分析工具,廣泛應用于物質的成分分析和結構鑒定,其工作原理基于物質對紅外輻射的吸收特性,能夠提供豐富的分子信息。IRAS通過探測地表和大氣向上發射的紅外光譜波段輻射,能夠反演出地表至40 km不同高度層的大氣溫度和濕度分布。該儀器配備的26個光譜通道,為數值天氣預報模式提供了初始場信息,尤其是在氣象臺站較稀少的高山、海洋、沙漠等地區,發揮著不可替代的作用。此外,利用IRAS反演得到的大氣溫度和濕度垂直分布信息,還能反映局地大氣的穩定度,對氣象部門中小尺度天氣系統的預報分析具有重要輔助價值。然而,IRAS的測量精度受多方面因素影響,包括儀器的光譜分辨率、環境干擾以及樣品制備質量等。隨著技術的進步,定量遙感應用對儀器輻射性能的要求愈發嚴格,確保數據的準確性成為成功開展定量遙感應用的前提之一。
在此背景下,利用深度學習技術提升IRAS的測量精度成為新的研究熱點。通過引入機器學習和深度學習方法,可以對光譜數據進行更深入的分析,精確識別微小的信號變化和潛在的干擾因素。深度學習模型憑借其強大的特征提取能力,能夠優化數據處理流程,提升分析的準確性和可靠性。針對濾光輪轉速不穩定引發的觀測誤差問題,漆成莉等[1-2]采用交叉定標方法減小了數據誤差。鄢俊潔等[3]針對FY-4A/AGRI儀器的光譜通道中缺失綠光通道的情況,提出了一種基于深度學習的光譜轉換方法,用于模擬FY-4A/AGRI的綠光通道,并通過遷移學習將其應用于該儀器上。Li等[4]針對傳感器退化問題,提出一種基于卷積神經網絡的相對校準方法,有效改善了傳感器退化帶來的問題。谷松巖等[5]則針對消除代際間輻射差異的歷史數據,提出了以國際參考載荷為基準的再定標技術路徑。
目前,卷積神經網絡(CNN)和遞歸神經網絡(RNN)等深度學習模型在處理復雜數據時展現出優越的性能。同時,結合無監督學習和遷移學習的方法,即使在缺乏大量標注數據的情況下,也能有效提升模型的泛化能力和適應性。本研究致力于探索一種創新的模型,旨在通過優化IRAS的數據處理流程,增強其在不同應用場景中的精確度。基于對現有光譜數據的深度分析和學習,該模型將更有效地識別異常信號,從而提升IRAS在科學研究和工業應用中的實用價值。
1 局限性分析
SAR衛星利用雷達方程推算出雷達散射截面積、定標常數與圖像DN值(Digital Number)之間的關聯,并開展設備定標驗證實驗[6],通過物理公式處理實驗數據,確保輻射定標的精度。風云衛星遙感數據則基于.NET 框架,采用多層次并行計算技術加速定標處理過程,選用可見光紅外掃描輻射計的數據作為測試對象,實現了可見光近紅外通道與紅外通道定標的快速處理[7]。高分衛星采用ROLO(Robotic Lunar Observatory) 模型、MT2009模型和嫦娥一號干涉成像光譜儀(IIM)模型進行定標驗證[8]。“資源三號”衛星則依托武漢大學在河南嵩山地區建設的幾何定標場等設施,實現了在軌幾何定標 [9]。
綜上所述,當前衛星數據精度提升方法存在局限性,既受限于物理模型的應用,又受制于場地條件。針對這些問題,亟須探索一種融合物理模型與深度學習技術的新方法,以突破現有方法的物理模型局限性和場地限制,進而提升IRAS在復雜環境下的測量精度。通過對現有技術的深入分析與整合,期望為IRAS的實際應用提供更穩健、可靠的解決方案。
2 基于深度學習的雙分支模型的構建
本文提出的基于深度學習的雙分支模型(DBL)旨在提高衛星遙感數據的定標精度,特別是解決了傳統方法依賴物理模型與場地要求的問題。該模型通過結合線性和非線性特征學習,顯著增強了對復雜衛星數據的適應能力。
2.1 模型結構設計
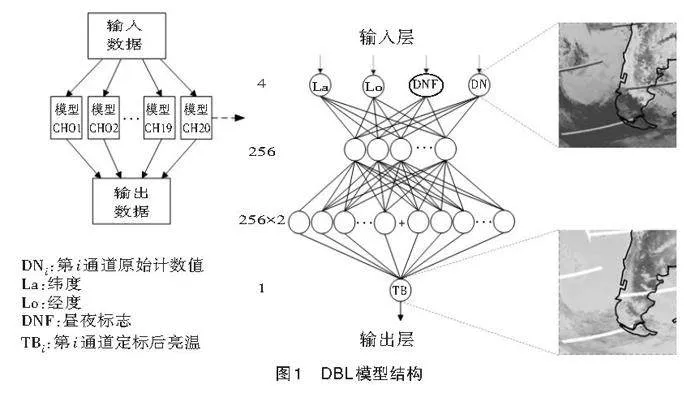
DBL模型結構如圖1所示,采用雙分支設計,包含以下兩條并行處理路徑:一條處理原始輸入數據,另一條處理輸入數據的平方特征。此設計旨在全面捕捉數據中的線性及非線性特征,從而增強模型對復雜衛星數據的擬合能力,尤其在衛星輻射定標與幾何定標任務中展現出優異性能。
在DBL模型中,每個分支包含一個BLR(BatchNorm + LeakyReLU)模塊,該模塊由線性變換層(nn.Linear)、批標準化層(nn.BatchNorm1d)和帶有負斜率的ReLU激活函數(nn.LeakyReLU)組成。這些模塊通過結合批標準化技術與非線性激活函數,加速了模型訓練過程,避免了梯度消失問題,從而提升了模型性能。兩條路徑處理完成后,分別得到特征圖x_1 和 x_2,它們各自經過獨立的BLR模塊處理,并最終加和,形成模型的最終輸出。這一操作融合了線性和非線性特征,增強了模型對復雜數據模式的學習能力。最終,處理后的特征通過線性輸出層(L_out)進行投影,生成衛星數據的定標值。
該模型具有以下優點:①不需要依賴物理模型,通過深度學習自動學習衛星數據規律,特別是在復雜的地形或光照條件下表現出靈活高效的定標能力。②高效數據處理,利用并行計算和深度學習模型的端到端訓練,自動提取衛星遙感數據中的關鍵信息,減少了對手工提取特征的依賴。③提高了定標精度,通過結合衛星圖像的線性和非線性特征,提升了定標結果精度,尤其是在對大規模數據的實時處理和精確校準方面展現出顯著優勢。
2.2 模型訓練
使用Adam優化器優化模型參數。Adam是一種自適應的學習率優化算法,其優勢是計算效率高,適用于大數據集,Adam優化器更新規則如下:
[θt+1=][θt-ηmtvt+ε] ," " " " " " " " " (1)
其中:θt+1代表在時間步t+1時通過應用Adam優化器更新公式得到的新模型參數;θt代表在時間步t時模型的參數;η代表學習率;mt和vt分別為梯度偏差矯正的動量項和方差項;[ε]是為了數值穩定性而添加的小常數。
在前向傳播階段,模型接受輸入數X后,經過兩層線性變換和ReLU激活函數,獲得模型的預測輸出值,其計算公式如下:
h = ReLU(W1X+b1)," " " " " " " " " "(2)
ypred = W2h+b2," " " " " " " " " " " " (3)
其中:h是隱層輸出;W1是第一線性層的權重矩陣;W2是第二線性層的權重矩陣;X是輸入數據;b1和b2分別是第一線性層的偏置項和第二線性層的偏置項;ypred是模型的預測值。
訓練過程中,模型輸出的實際值ytrue與預測值ypred之間的誤差需要通過損失函數進行計算。使用均方誤差(MSE)衡量預測值與真實值之間的差距,計算公式如下:
[MSELoss=1Ni=1N(ypred,i-ytrue,i)2]," " " " " (4)
其中,N是樣本的數量。
在每個迭代訓練中,模型會遍歷整個訓練數據集。針對每個數據批次,模型首先計算預測值,其次根據預測值和真實值計算出損失值。最后根據損失值計算梯度,并通過調用代碼函數loss.backward執行反向傳播。在迭代訓練過程中,對于給定的輸入xi,模型會計算出相應的損失,并據此更新模型的權重。前向傳播計算公式如下:
[yi=f(xi;θ)]," " " " " " " " " " " " " (5)
其中:[yi是模型的預測結果,]f是模型的前向計算過程,xi是第i個樣本的數據,[θ]是模型的參數。通過計算每個數據批次的損失,獲得反向傳播過程所需要的參數L,其計算公式如下:
[L=1Bi=1B(f(xi;θ)-yi)2]," " " " " " " (6)
其中:L是每個數據批次的損失;B是當前批次所有數據的個數;yi是第i個樣本所對應的真實輸出值。
每次訓練后,損失函數的值會逐漸減小,表明模型在不斷優化。如果某次訓練后的損失值低于之前的最低損失,則保存當前模型的狀態。最終,訓練過程將返回最優模型的損失值及其對應參數。如果模型在某次訓練后未能得到改善,則通過乘以一個衰減因子來調整學習率,以避免因學習率過高導致的震蕩,并促進模型更好地收斂。每次訓練結束后,利用評估函數計算模型在驗證集上的平均損失,如果當前模型損失較低,則更新并保存該模型。
2.3 模型選擇
本文使用的BLR層包含3個部分,通過線性模型進行變換,每一層的線性變換可表示為
[y=Wx+b]," " " " " " " " " " " " " " (7)
其中:y是模型的預測輸出,W是權重矩陣,x是輸入數據,b是偏置。
隨后,對線性變換的結果進行批量歸一化處理,以提升訓練速度和模型的穩定性。批量歸一化公式如下:
[x=x-uσ ][γ=β]," " " " " " " " " " " " "(8)
其中:[x]是歸一化后的輸出值;u和σ分別為輸入的均值和標準差;γ和β分別為可學習的縮放和偏移參數。
在批量歸一化處理之后,使用Leaky ReLU激活函數引入非線性,從而增加模型的表示能力和復雜度,避免訓練過程中出現梯度消失或死神經元等問題,激活函數Leaky ReLU,可以表示為
[Leaky" ReLU(y)=y" " " if y≥0αy" " " if ylt;0]," " " " " " " (9)
其中,α是Leaky ReLU的負斜率參數。激活函數增加了負數區域的斜率,從而避免了傳統ReLU中的“死亡神經元”問題。Leaky ReLU的非線性特性能夠使模型學習更復雜的函數。
通道模型中包含3個BLR層,將輸入分為兩部分:原始輸入x和平方后的輸入x2。這兩個部分數據分別通過不同的全連接層進行處理,然后進行合并,最終通過輸出層生成預測結果。該通道模型的神經網絡結構表達式如下:
y=W1×ReLU(W2×x)+W3×ReLU(W4×x2)。" " "(10)
通過公式(10),實現了一個前饋神經網絡,該網絡包括3個線性層以及Leaky ReLU激活函數。該模型通過線性變換和非線性激活對輸入數據進行處理。
3 實驗與結果
3.1 實驗設置
(1)設置不同的隱藏層大小H,H={16,32,48,64,80,96,112,128,144,160,176,192,208,224,240,256} ,并記錄每種設置下的訓練和測試結果。
(2)對訓練輪數進行限制,并采用早停策略。將模型訓練的最大 epoch 數設為[Tmax∈[500,1000]]。
(3)在訓練過程中,若損失函數L不再下降,則觸發early stopping機制,即提前終止訓練,以防止模型過擬合。
(4)在數據集的劃分上,將數據集分為訓練集和測試集,比例為 70%∶30%。定義數據集 [D=X?Y],其中X是輸入特征,Y是輸出標簽。分割后,得到訓練集[Dtrain?D],滿足[|Dtrain|=0.7×|D|]和[|Dtest|=0.3×|D|]。
(5)實驗中,動態調整學習率,設定初始學習率[α=1],并采用Adam優化器。每次訓練epoch后,若損失函數L在驗證集上不下降,則根據以下公式動態調整學習率[α]:
[αt+1=αt×decay_rate" " "if" "Lt+1 gt; Lt]。" " " (11)
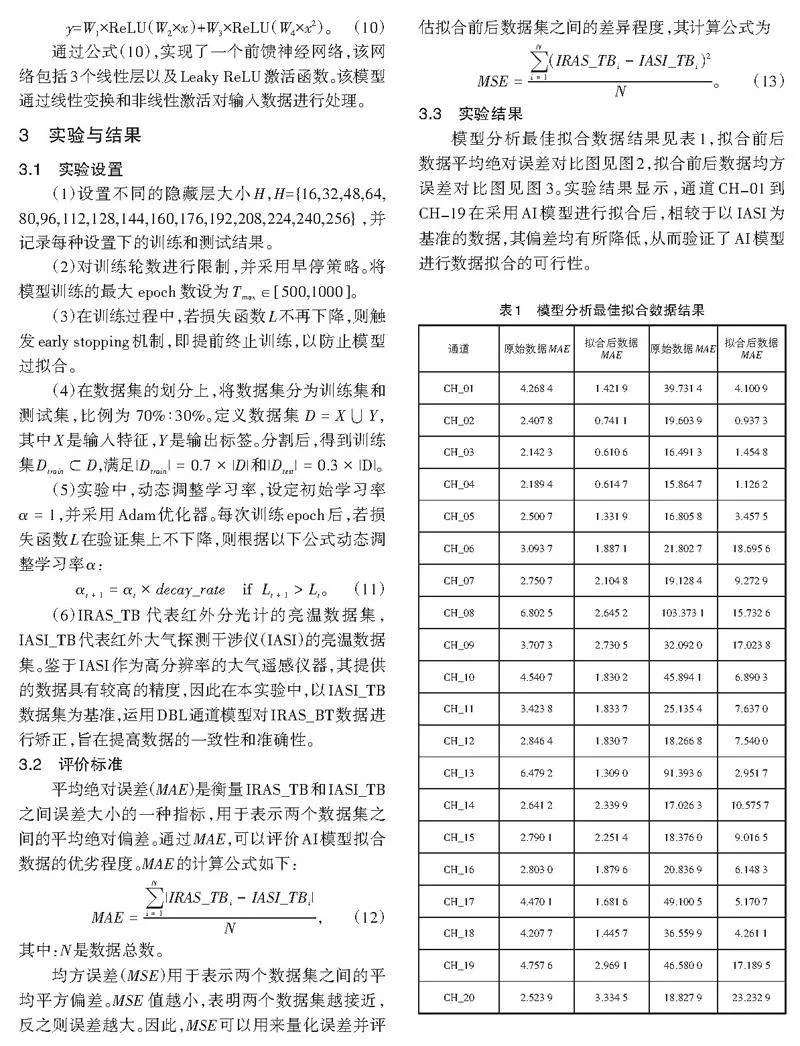
(6)IRAS_TB 代表紅外分光計的亮溫數據集,IASI_TB代表紅外大氣探測干涉儀(IASI)的亮溫數據集。鑒于IASI作為高分辨率的大氣遙感儀器,其提供的數據具有較高的精度,因此在本實驗中,以IASI_TB數據集為基準,運用DBL通道模型對IRAS_BT數據進行矯正,旨在提高數據的一致性和準確性。
3.2 評價標準
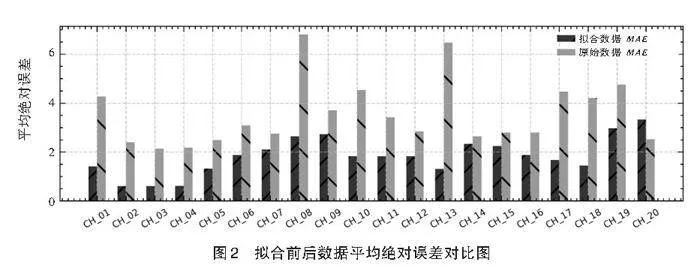
平均絕對誤差(MAE)是衡量IRAS_TB和IASI_TB之間誤差大小的一種指標,用于表示兩個數據集之間的平均絕對偏差。通過MAE,可以評價AI模型擬合數據的優劣程度。MAE的計算公式如下:
[MAE=i=1N|IRAS_TBi-IASI_TBi|N]," " " "(12)
其中:N是數據總數。
均方誤差(MSE)用于表示兩個數據集之間的平均平方偏差。MSE 值越小,表明兩個數據集越接近,反之則誤差越大。因此,MSE可以用來量化誤差并評估擬合前后數據集之間的差異程度,其計算公式為
[MSE=i=1N(IRAS_TBi-IASI_TBi)2N]。" " " " (13)
3.3 實驗結果
模型分析最佳擬合數據結果見表1,擬合前后數據平均絕對誤差對比圖見圖2,擬合前后數據均方誤差對比圖見圖3。實驗結果顯示,通道CH-01到CH-19在采用AI模型進行擬合后,相較于以IASI為基準的數據,其偏差均有所降低,從而驗證了AI模型進行數據擬合的可行性。
4 結語
本研究提出了一種創新的擬合數據方法,該方法融合了AI模型技術,旨在借助AI模型的強大能力提升數據的精確度。通過選擇并應用多種不同的AI模型進行數據擬合,成功優化了IRAS獲取的亮溫數據與IASI獲取的亮溫數據之間的偏差問題,從而實現了數據精確度的有效提升。實驗結果顯示,采用平均絕對誤差和均方誤差這兩種估計方法對擬合前后的數據進行對比分析后,除通道CH-20的數據外,其余通道的數據精度均得到了顯著提升。這一成果在一定程度上滿足了數據應用對高精度的需求,驗證了本研究方法的有效性和實用性。
5 參考文獻
[1]漆成莉,陳勇,劉輝,等.風云三號B星紅外分光計的定標和驗證[J].氣象科技進展,2013(4):11.
[2]漆成莉,徐寒列,胡秀清,等.風云三號氣象衛星紅外分光計在軌交叉定標精度監測系統[J].紅外與毫米波學報, 2016,35(3):341-349.
[3]鄢俊潔,瞿建華,袁鳴鴿,等.基于深度學習的風云四號衛星綠光通道構建方法[J].遙感技術與應用,2023,38(1):214-226.
[4]Li X T,Ye Z Z,Ye Y M,et al.A Convolutional Neural Network-Based Relative Radiometric Calibration Method[J].IEEE Transactions on Geoscience and Remote Sensing,2022(60):1-11.
[5]谷松巖,郭楊,謝鑫新,等.風云三號衛星微波載荷歷史數據再定標.遙感學報[J].2023,27(10):2252-2269.
[6]鄧明軍,陳志遠,張過,等. 國產C波段SAR衛星絕對輻射定標精度驗證[J].中國空間科學技術,2024,44(5):147-154.
[7]馬駿,宋麗君,徐輝,等.基于多層次并行的風云三號氣象衛星數據定標[J].微電子學與計算機,2013,30(12):142-145.
[8]蔡偉,吳昀昭,徐天奕,等.基于月球輻射定標源的衛星定標和驗證研究[C]//第八屆高分辨率對地觀測學術年會論文集.中國科學院紫金山天文臺,澳門科技大學,2022:674-687.
[9]李德仁,王密.“資源三號”衛星在軌幾何定標及精度評估[J].航天返回與遙感,2012,33(3):1-6.
*2024年度大學生創新創業訓練計劃項目“北斗氣象衛星紅外分光計的定標和驗證研究”(s202411535120)。
【作者簡介】宋子琛,男,河北滄州人,在讀本科生,研究方向:數據挖掘;莫靖宇,男,廣東惠州人,在讀本科生,研究方向:深度學習神經網絡;何家偉,男,在讀碩士研究生,湖南株洲人,研究方向:人工智能;袁鑫攀(通信作者),男,湖南株洲人,博士,副教授,研究方向:工業智能、文獻自動化解讀和多模態信息檢索、醫學圖像分析。
【引用本文】宋子琛,莫靖宇,何家偉,等.基于DBL的紅外分光計通道定標模型研究[J].企業科技與發展,2024(12):1-5.
猜你喜歡
西安航空學院學報(2022年2期)2022-07-04 07:45:42
汽車零部件(2020年3期)2020-03-27 05:30:20
表面工程與再制造(2019年1期)2019-05-11 08:52:04
商界(2019年12期)2019-01-03 06:59:05
家庭影院技術(2018年9期)2018-11-02 05:31:34
IT經理世界(2018年20期)2018-10-24 02:38:24
通信電源技術(2018年3期)2018-06-26 06:33:30
軍營文化天地(2018年1期)2018-02-10 05:19:25
小康(2017年16期)2017-06-07 09:00:59
學與玩(2017年12期)2017-02-16 06:51:12
