多智能體編隊加權中心點固定時間分布式跟蹤控制
2024-01-18 00:00:00孫谷昊蔡中澤曾慶雙
系統工程與電子技術 2024年12期
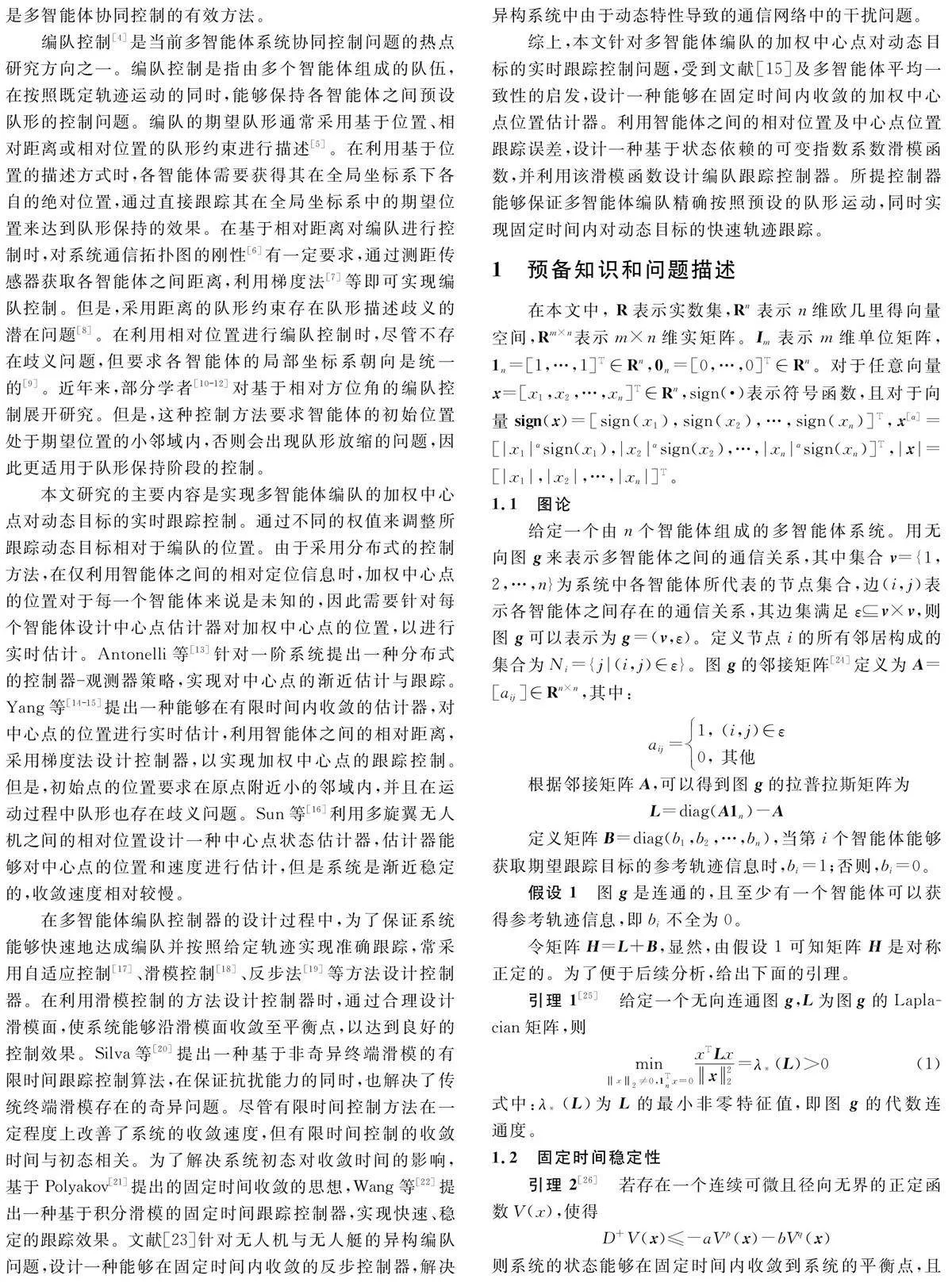

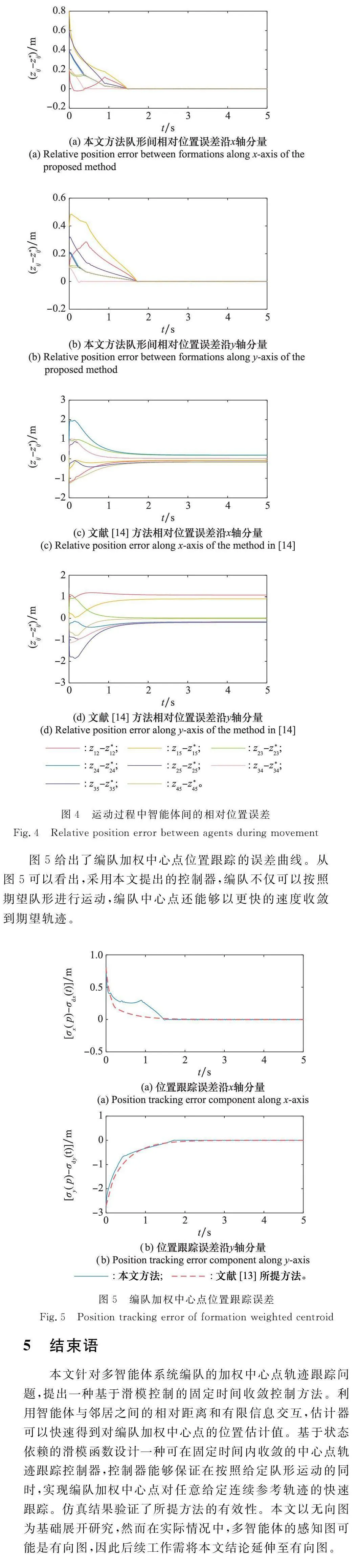

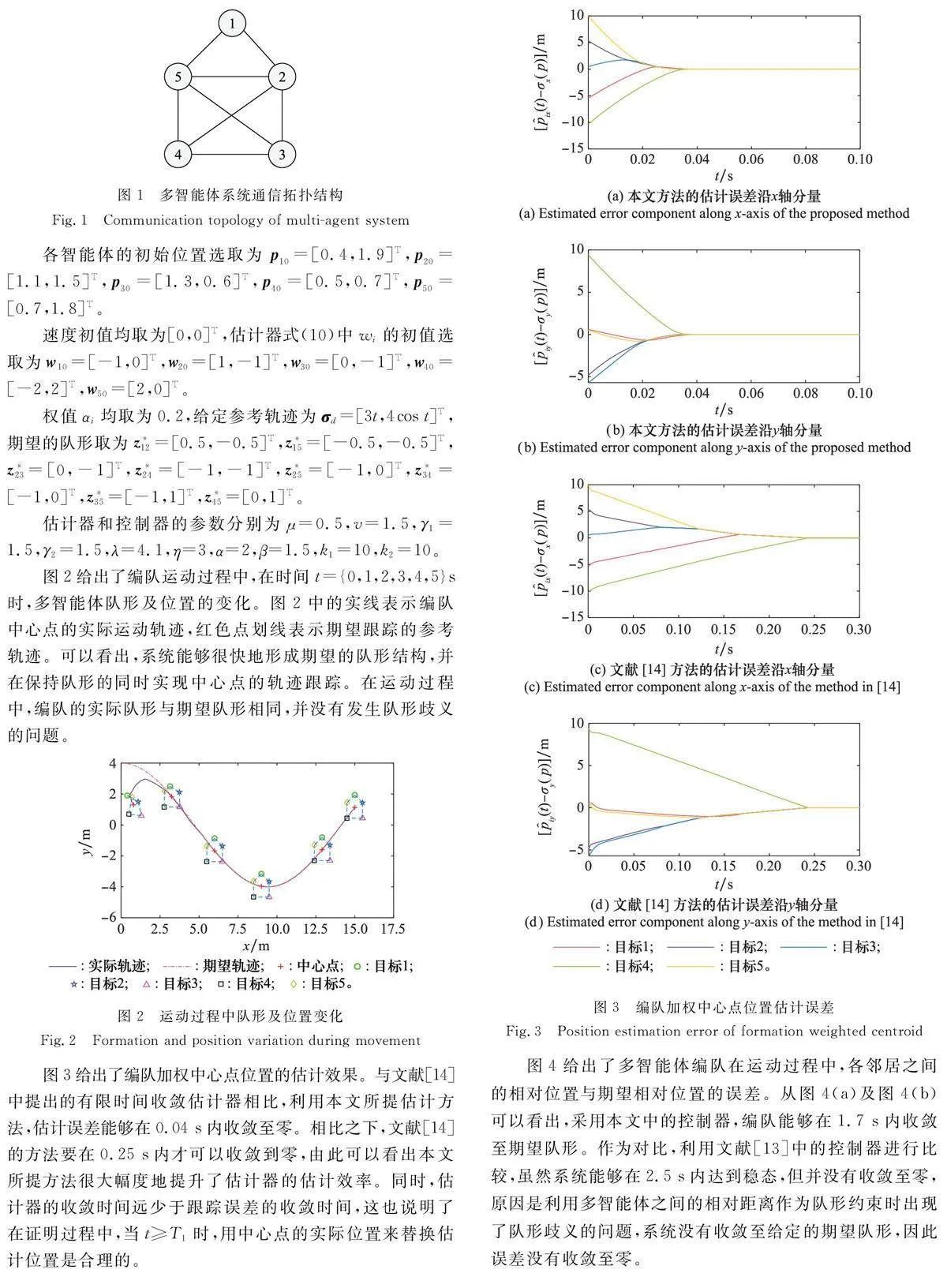


關鍵詞:多智能體系統;編隊控制;固定時間收斂;中心點估計;滑模控制;分布式控制
中圖分類號:V249 文獻標志碼:A DOI:10.12305/j.issn.1001-506X.2024.12.25
作者簡介
孫谷昊(1992—),男,博士研究生,主要研究方向為非線性控制及其在多智能體系統中的應用。
蔡中澤(1993—),男,博士研究生,主要研究方向為滑模控制理論方法及其在電路系統中的應用。
曾慶雙(1963—),男,教授,博士,主要研究方向為高精密運動控制技術、慣性技術、智能無人系統。
