地形跟隨飛行能量協調在線軌跡規劃與跟蹤
2024-01-18 00:00:00朱日楠王彪張瀚唐超穎徐錦法
系統工程與電子技術 2024年12期

關鍵詞:地形跟隨;能量協調;軌跡規劃;模型預測控制;自適應預測時域
中圖分類號:V249.1文獻標志碼:A DOI:10.12305/j.issn.1001-506X.2024.12.28
0引言
地形跟隨是飛行器保持航向不變,依靠縱向機動能力調整飛行狀態,使飛行器盡量貼近地形,隨地形起伏飛行的一種飛行方式。由于地形遮蔽以及地面雜波的影響,雷達設施較難捕獲超低空目標,加之飛行器快速機動,對方跟蹤瞄準難度大,因此采用地形跟隨飛行突破對方防區的生存率會更高[1]。
早期地形跟隨技術采用高度控制方法,利用機載高度表向下探測離地高度,控制其與預設離地距離一致,實現地形跟隨飛行[2]。由于該方案無法獲取飛行前方地形信息,飛行航跡將明顯滯后于地形剖面,觸地風險大。為保證飛行安全,往往設置較大離地高度,飛行器暴露概率大。對此,前視探測方案被提出,其利用前視傳感器獲取飛行器前方地形點信息,經公式轉換得到導引指令,完成飛行任務,如角指令法[2]、適應角法[3]等。目前,常用的前視傳感器有機載雷達[4]、機載攝像機[56]等。但該方案不易獲取山峰背面地形,不利于過峰后的下坡飛行;且機載雷達向前發射的雷達波易被對方感知,暴露風險大;而因受視場角與探測距離的制約,利用機載攝像機進行遠距離探測時極易因視場角較小而出現相機視野內無地形的情形[7],產生波浪狀航跡,不利于飛行安全。
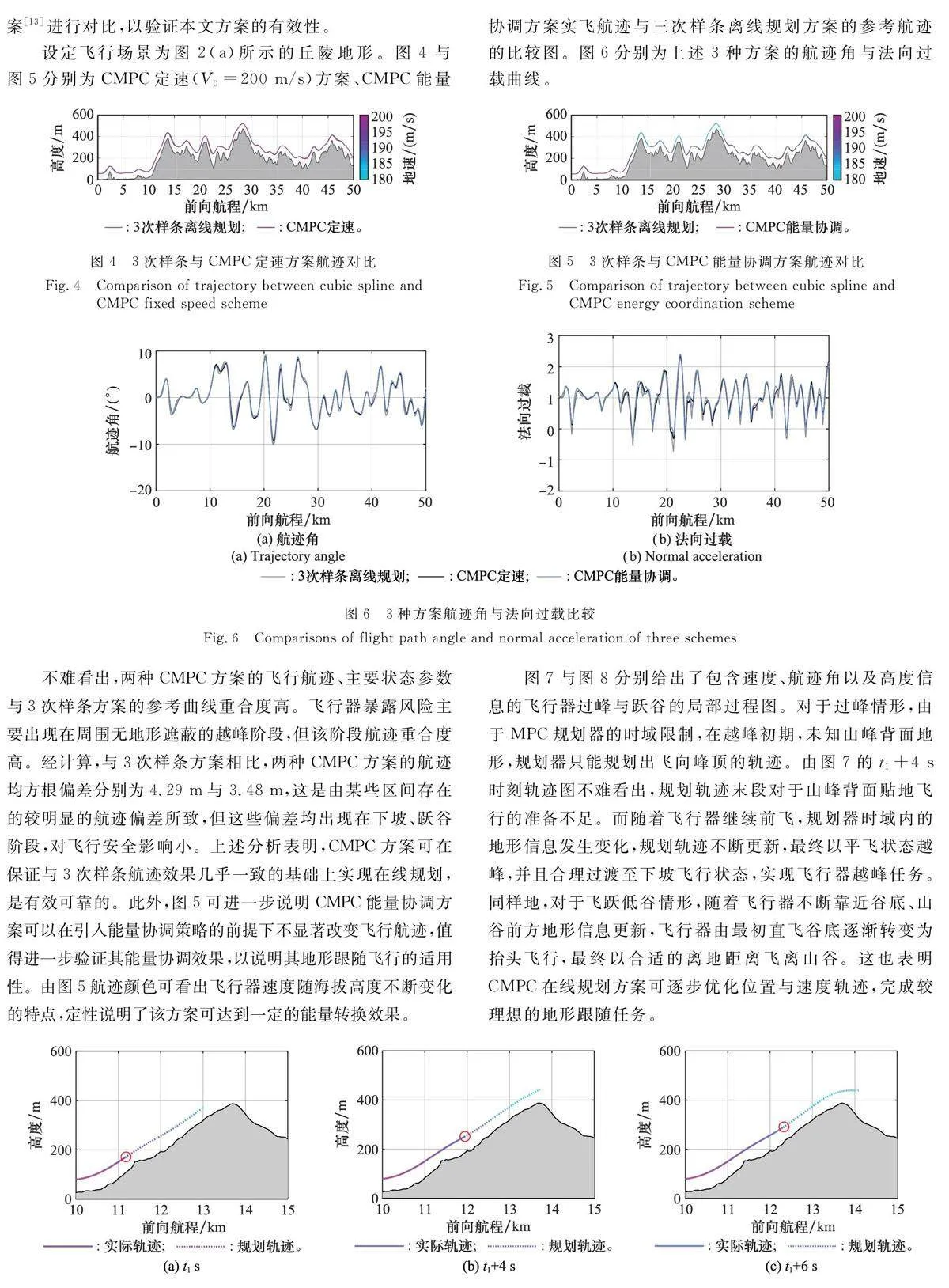
近年來,隨著計算機與地理信息技術的日益完善,高精度數字地圖的發展使飛行器可事先獲取全局地形信息[8],從而規避在線探測方式的弊端。目前,利用數字地圖的航跡規劃方案逐漸成為地形跟隨主流方案。常采用最短路徑搜索算法獲得飛行參考航跡,如動態規劃[9]、A 算法[10]、神經網絡算法[11]、遺傳算法[12]等。但上述方法得到的航跡無法包含飛行器狀態約束,航跡易出現拐點,平滑度差。文獻[13]基于三次樣條函數,提出滿足飛行器運動約束的定速地形跟隨全局參考航跡離線規劃方法,其將運動約束映射為樣條曲線的參數約束,進而將問題轉換為多約束的數學優化問題,通過優化求解獲得最優航跡。
參考航跡跟蹤問題分為間接跟蹤與直接跟蹤兩類。間接跟蹤方式將航跡跟蹤問題分為制導與控制兩部分解決,常用的導引方法有視線法[14]、矢量場法[1516]等。文獻[17]采用矢量場方法,利用高度跟蹤誤差為當前位置的飛行器計算超前的導引指令,改變飛行器速度方向,間接實現航跡跟蹤。隨著控制理論研究的深入,線性二次型[18]、自抗擾控制[19]、模型預測控制[20](modelpredictivecontrol,MPC)等跟蹤控制器的應用,使直接跟蹤效果得到顯著提升。
近年來,由于MPC可對預測模型的狀態量、控制量、輸出量自由設置約束,獲得預測時域內各狀態的最優估計值,其作為更具優勢的在線局部路徑規劃方式被逐步應用于機器人[2122]、無人車[23]、無人船[24]、無人機[25]等諸多領域的避障與避碰場景。人工勢場[26](artificialpotentialfield,APF)往往與MPC 結合(簡稱為APF-MPC)完成局部路徑規劃,其具體由以下兩種方式實現。一是利用APF-MPC直接生成執行器指令。文獻[27]利用梯度下降法給出預測時域內無人車在APF 中的參考速度方向序列,并利用MPC直接給出前輪轉角指令,實現勻速狀態下車輛對靜態或動態障礙車輛的自動回避。文獻[28]中,不同的APF作為描述交通工況、車道約束與障礙特征的權重項被引入MPC目標函數,進而控制車輛完成避障任務。二是由APF-MPC生成預測時域范圍內的參考路徑點,再由另一控制器跟蹤該路徑。文獻[29 30]利用該方式分別實現車輛避障與無人機地形回避與威脅回避(terrainavoidanceandthreatavoidance,TA2)飛行。第一種方式利用每一時刻MPC求解得到的最優控制序列首項進行運動控制,這便要求APF-MPC以較高頻率運行,以保證良好的控制效果;而后者由于提供了一定時域內的參考路徑,其運行頻率可低于前者。但是,為了確保避障完成后收斂至原路徑繼續運動,上述所有方案規劃的局部避障路徑均需以全局參考路徑為基礎,即該方案離不開預先規劃的全局路徑。此外,上述方案無法實現速度規劃。第二種方式可獲得與時間相關的狀態軌跡,但由于其僅利用位置狀態軌跡,且最終將其整合為與位置相關的參考路徑點,未充分發揮MPC狀態軌跡預測的優勢,使路徑規劃問題無法向包含位置、速度、時間等信息的軌跡規劃方向提升。
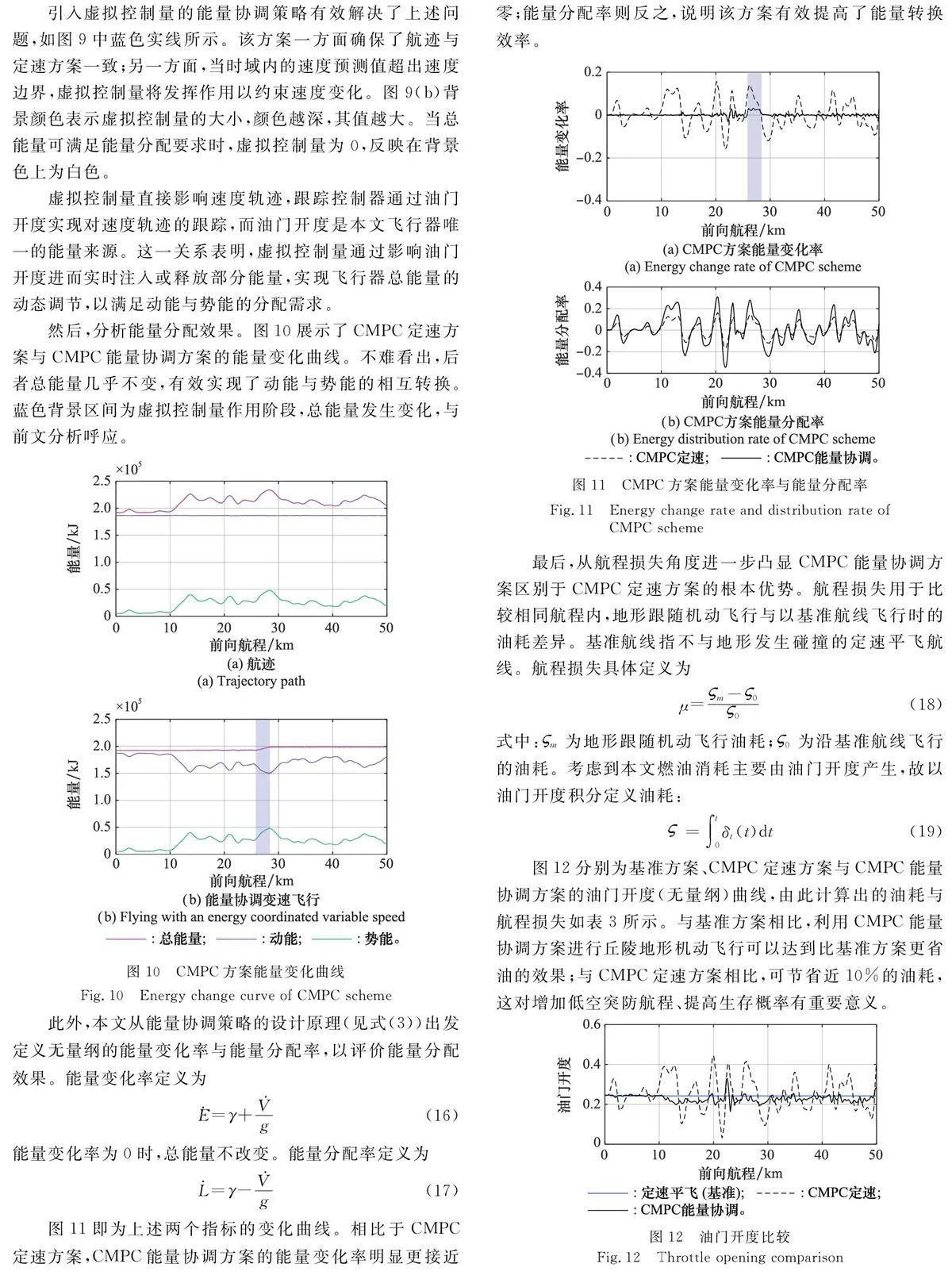
本文期望通過在線規劃的方式,降低全局規劃對計算機運算與存儲帶來的負擔,且希望同時規劃得到位置與速度軌跡,實現地形跟隨變速飛行,以減少飛行器大機動飛行造成的能量損耗。顯然,上述路徑規劃方法無法滿足本文研究需求。
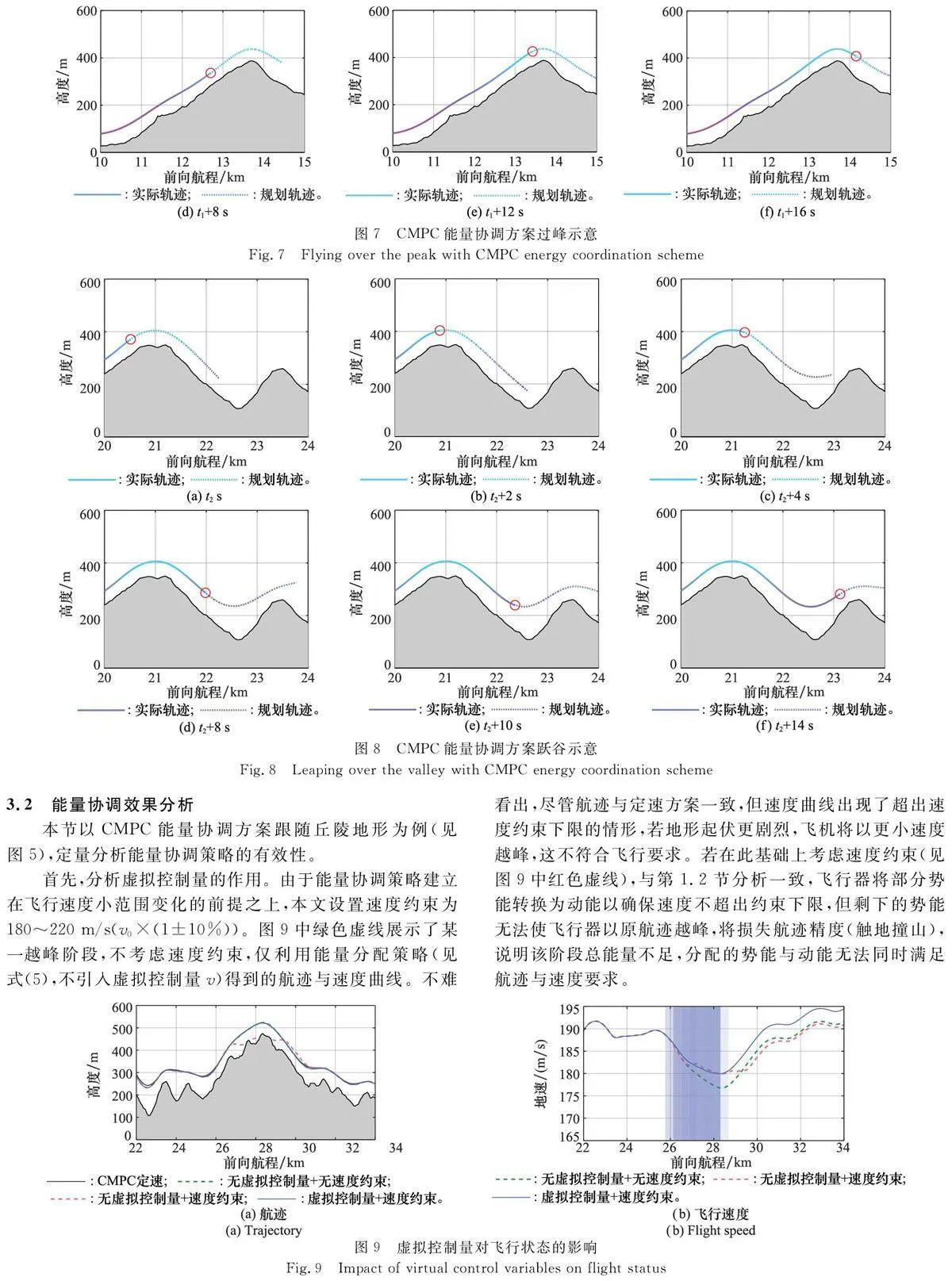
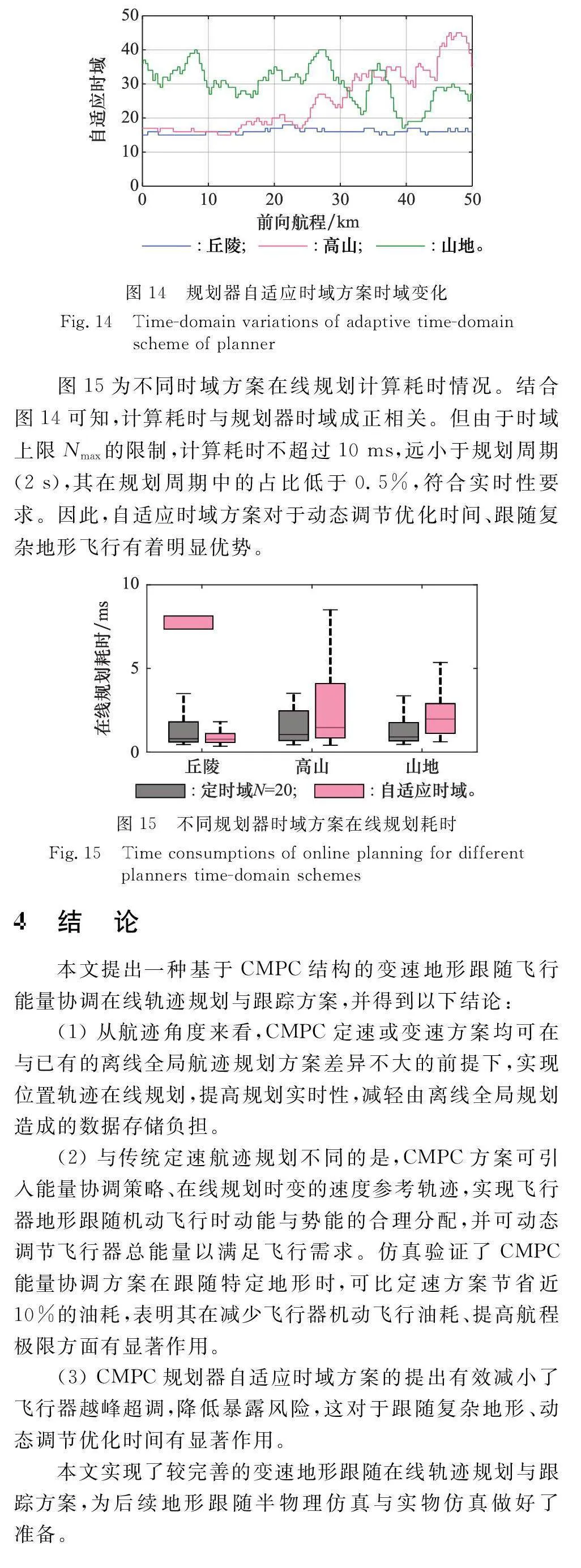
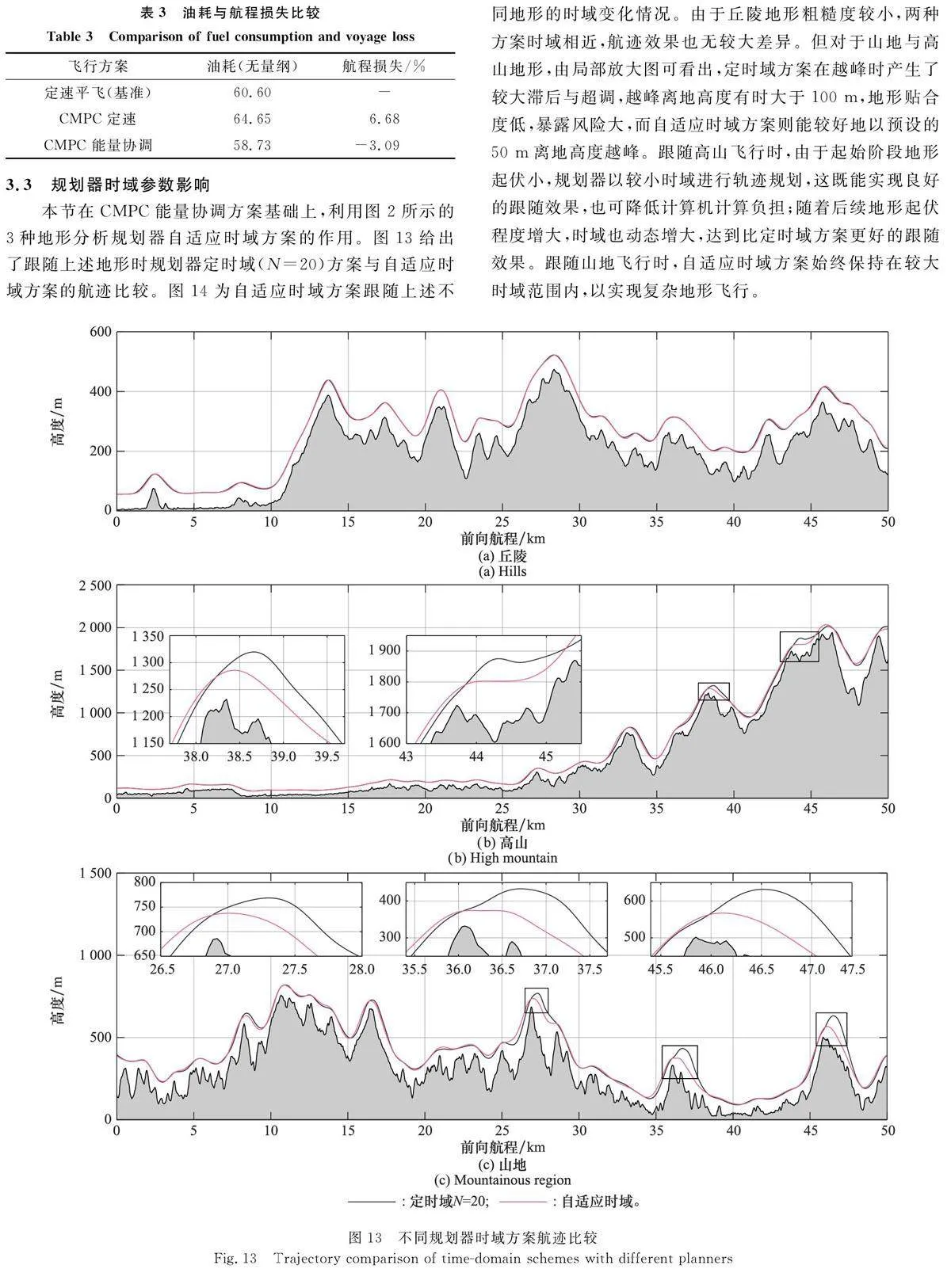
對此,本文利用MPC的預測優勢,結合能量協調要求,設計MPC在線軌跡規劃器與MPC 軌跡跟蹤控制器,構成級聯MPC (cascaded MPC,CMPC),以完成無全局預先規劃的能量協調變速地形跟隨飛行。本文安排如下:第1節根據能量協調要求確定規劃器預測模型,并結合地形起伏程度為規劃器設計自適應預測時域,完成在線軌跡規劃,給出位置與速度參考軌跡;第2節設計跟蹤控制器,實現軌跡跟蹤控制;第3節利用真實地形數據給出仿真驗證結果,分別從航跡、能量協調、規劃器時域3 個角度分析本文所提CMPC能量協調在線軌跡規劃與跟蹤方案的有效性;第4節總結全文。
1能量協調在線軌跡規劃
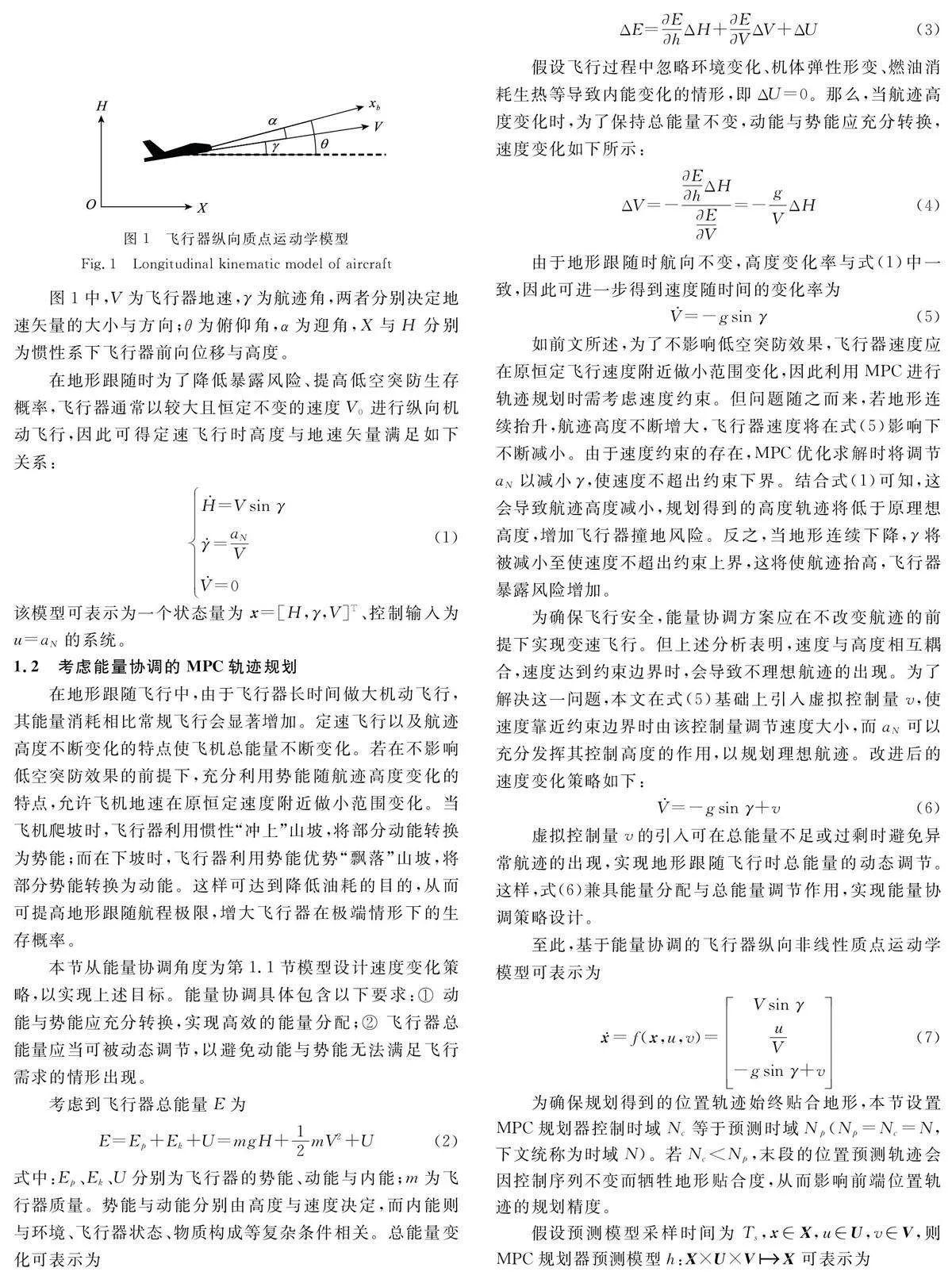
1.1定速飛行縱向質點運動學模型
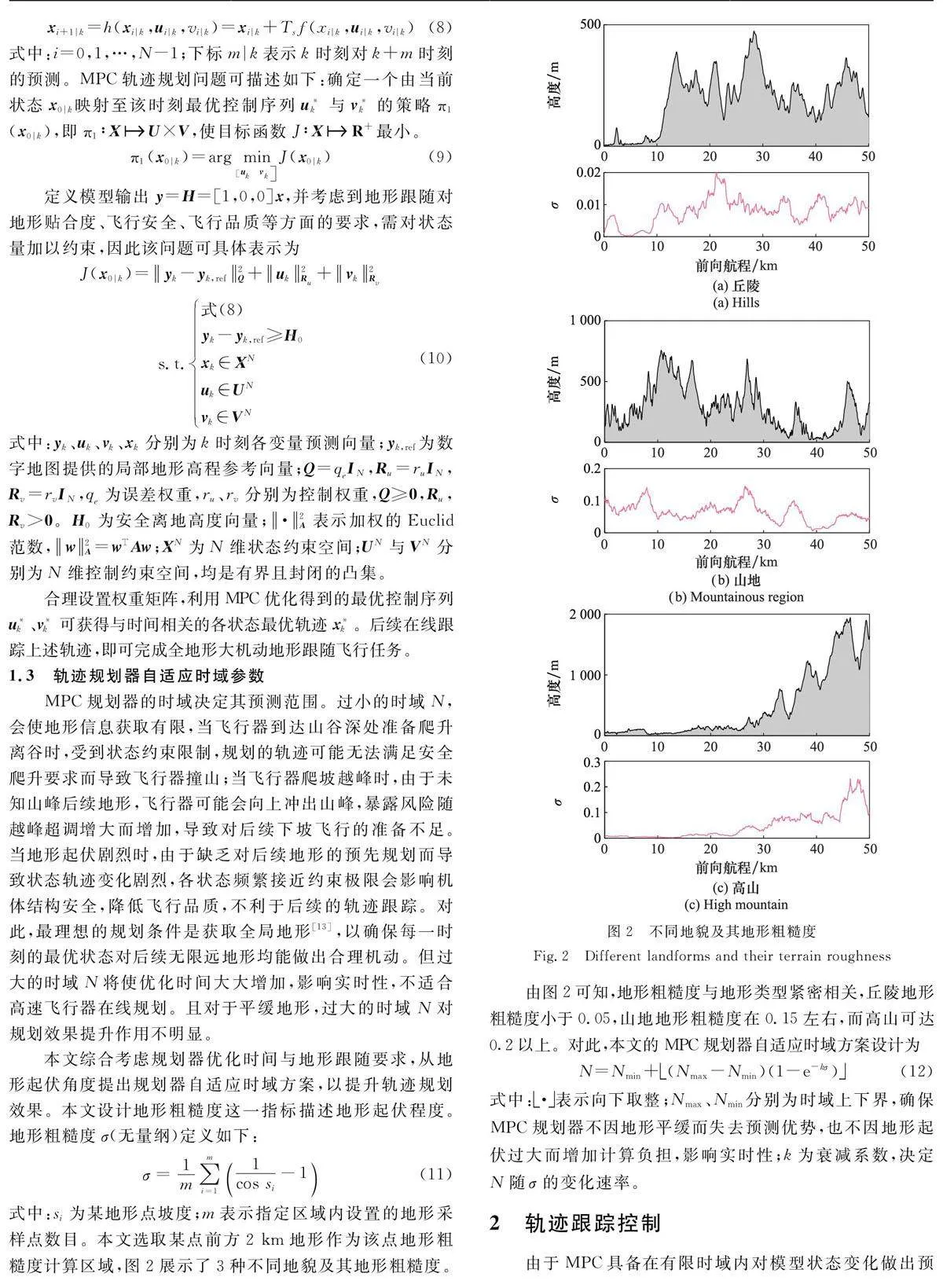
由于MPC可提供預測時域內預測模型各狀態量的最優軌跡,本文采用MPC進行地形跟隨在線軌跡規劃。為了約束大機動飛行時法向過載、航跡角等影響飛行安全的狀態,同時避免模型階數過高而導致MPC優化時間過長的問題,本文采用以法向加速度為控制輸入的固定翼飛行器縱向質點運動學模型(如圖1所示)作為MPC 規劃器的預測模型。
作者簡介
朱日楠(1999—),男,碩士研究生,主要研究方向為地形跟隨飛行控制。
王彪(1975—),男,副教授,博士,主要研究方向為導航、制導與控制。
張瀚文(2000—),男,碩士研究生,主要研究方向為飛行器航跡規劃。
唐超穎(1979—),女,副教授,博士,主要研究方向為導航、制導與控制。
徐錦法(1963—),男,教授,博士,主要研究方向為直升機飛行力學及控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中等數學(2022年2期)2022-06-05 07:10:50
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
