多級(jí)旋轉(zhuǎn)式角反射器陣列電磁散射特性分析
2024-01-19 02:30:34張義于群趙非玉尹慶國(guó)劉圓圓馬添瀟
電波科學(xué)學(xué)報(bào) 2023年6期
關(guān)鍵詞:分析
張義 于群 趙非玉 尹慶國(guó) 劉圓圓 馬添瀟
(中國(guó)電子科技集團(tuán)公司光電研究院, 天津 300308)
0 引 言
角反射器是一種利用兩到三面相互垂直的金屬平面組成的無源干擾裝置,利用幾何結(jié)構(gòu)實(shí)現(xiàn)對(duì)入射電磁波的原路反射,從而能夠在小尺寸下得到較高的雷達(dá)散射截面(radar cross section, RCS),達(dá)到對(duì)敵方雷達(dá)探測(cè)及制導(dǎo)起到干擾、欺騙及誘偏的目的[1].
單一使用的角反射器受尺寸及入射角度限制,RCS 較小,角度特性較差,難以滿足全角域干擾需求.所以一般都采用多個(gè)角反射器組成陣列的方法,以實(shí)現(xiàn)提高RCS 及改善角度特性的目的[2].角反射器陣列形式一般有兩種:第一種是通過將多個(gè)角反射器組合形成一個(gè)整體結(jié)構(gòu)進(jìn)行使用,例如英國(guó)DLF-2“大黃鴨”八象限充氣式角反射器以及DLF-3 二十面體充氣式角反射器[3];第二種是通過將多個(gè)角反射器按照一定的間隔進(jìn)行布設(shè)排布,形成角反射器陣列,用以模擬大型艦船或地面目標(biāo)等[4-5].本文給出了一種用于地面目標(biāo)防護(hù)的新型結(jié)構(gòu)可變的角反射器陣列設(shè)計(jì),并通過仿真建模分析得到了兩種典型角反射器陣列的雷達(dá)散射特性,同時(shí)對(duì)其布設(shè)間隔進(jìn)行了尋優(yōu)分析.陣列的雷達(dá)散射特性可靈活調(diào)節(jié),從而產(chǎn)生無源假目標(biāo)干擾效果,對(duì)于防護(hù)地面重要目標(biāo)具有較好的應(yīng)用價(jià)值[6].
1 多級(jí)旋轉(zhuǎn)式角反射器陣列設(shè)計(jì)
1.1 RCS 特性可調(diào)角反射器設(shè)計(jì)
為了能夠?qū)崿F(xiàn)角反射器陣列在各角度方向RCS 特性的調(diào)節(jié),多級(jí)旋轉(zhuǎn)式角反射器陣列設(shè)計(jì)采用多個(gè)角反射器組成一個(gè)陣列單元,每個(gè)陣列單元內(nèi)可通過角反射器的多級(jí)旋轉(zhuǎn)來實(shí)現(xiàn)RCS 特性的調(diào)節(jié),并通過多個(gè)陣列單元間隔排布完成整個(gè)陣列布設(shè)[7].
角反射器按包含平面的數(shù)量主要分為二面角反射器及三面角反射器,其中三面角反射器最為常用,主要包括三角形、圓形以及方形三種基本結(jié)構(gòu)形式.其中方形角反射器的RCS 最大,但主要覆蓋角度較小;三角形主要覆蓋角度較大,但是RCS 較小;圓形則兩方面均較為適中[8].
為保證較高的RCS 以及旋轉(zhuǎn)結(jié)構(gòu)設(shè)計(jì),RCS 特性可調(diào)角反射器基于方形角反射器進(jìn)行改進(jìn)設(shè)計(jì),將角反射器垂直面的兩塊反射板進(jìn)行若干等分,并通過旋轉(zhuǎn)來實(shí)現(xiàn)對(duì)角反射器RCS 特性的調(diào)節(jié).每個(gè)角反射器主要由反射底板、旋轉(zhuǎn)式反射葉片及葉片驅(qū)動(dòng)機(jī)構(gòu)組成,如圖1 所示.其中反射底板為固定金屬平板,用于支撐及反射電磁波;葉片驅(qū)動(dòng)結(jié)構(gòu)通過電機(jī)傳動(dòng)控制反射葉片實(shí)現(xiàn)旋轉(zhuǎn),并完成對(duì)角反射器RCS 特性的調(diào)節(jié).葉片旋轉(zhuǎn)角度為0°時(shí),即為普通方形三面角反射器,各角度RCS 最大;當(dāng)一面旋轉(zhuǎn)為90°,一面為0°時(shí),則為二面角反射器,對(duì)垂直于雙面軸的平面入射電磁波呈現(xiàn)較大的RCS;當(dāng)兩面旋轉(zhuǎn)角度均為90°時(shí),各反射葉片為平行狀態(tài),RCS 最低.隨著旋轉(zhuǎn)角度的變化,角反射器的RCS 特性也會(huì)隨之發(fā)生改變,并通過多個(gè)角反射器進(jìn)行模塊化陣列組合,即可實(shí)現(xiàn)多級(jí)旋轉(zhuǎn)式角反射器陣列構(gòu)建,并控制整體RCS 特性的改變.

圖1 RCS 可調(diào)角反射器結(jié)構(gòu)示意圖Fig.1 Schematic of the RCS adjustable corner reflector
1.2 多級(jí)旋轉(zhuǎn)式角反射器陣列設(shè)計(jì)
為了有效地將多個(gè)RCS 可調(diào)角反射器進(jìn)行組合,角反射器陣列單元采取雙層疊加設(shè)計(jì),每層包含三個(gè)角反射器并通過陣列旋轉(zhuǎn)機(jī)構(gòu)連接,如圖2 所示.每個(gè)角反射器可繞中心軸進(jìn)行方位旋轉(zhuǎn),并且每個(gè)角反射器自身反射葉片也可進(jìn)行旋轉(zhuǎn),通過多級(jí)旋轉(zhuǎn)改變整體RCS 特性.
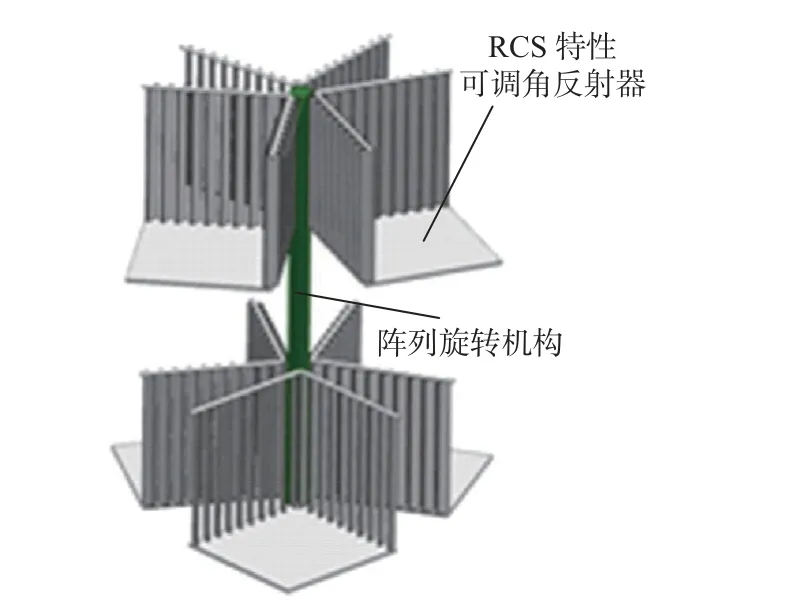
圖2 多級(jí)旋轉(zhuǎn)式角反射器陣列單元Fig.2 Multistage rotary corner reflector array unit
單個(gè)角反射器為了便于運(yùn)輸和布設(shè),不宜做得過大,所以為了提高整體的RCS 并且在距離上形成多個(gè)假目標(biāo),可以將多個(gè)角反射器陣列單元通過合理的間隔布設(shè)成為陣列.針對(duì)典型地面目標(biāo)(重要建筑物、導(dǎo)彈發(fā)射車等)的結(jié)構(gòu)特點(diǎn),線性陣列可對(duì)長(zhǎng)寬比較大的目標(biāo)進(jìn)行防護(hù),圓形陣列可對(duì)典型建筑物或長(zhǎng)寬比較接近的目標(biāo)進(jìn)行防護(hù).構(gòu)建形成的多級(jí)旋轉(zhuǎn)式角反射器陣列,如圖3 所示.借助旋轉(zhuǎn)機(jī)構(gòu)可以控制每個(gè)陣列單元的角反射器以及角反射器內(nèi)部反射葉片的旋轉(zhuǎn),來調(diào)節(jié)整個(gè)陣列的RCS 特性,形成無源假目標(biāo)誘騙敵方精確雷達(dá)制導(dǎo)武器打擊,實(shí)現(xiàn)對(duì)地面重要目標(biāo)的無源防護(hù).導(dǎo)彈視場(chǎng)較小,且來襲時(shí)一般距離較近,為了提高防護(hù)效果,通常希望導(dǎo)彈來襲時(shí)視場(chǎng)內(nèi)能夠存在兩個(gè)以上的角反射器陣列單元,因此陣列布設(shè)間隔不宜過大,一般在幾十米范圍以內(nèi).
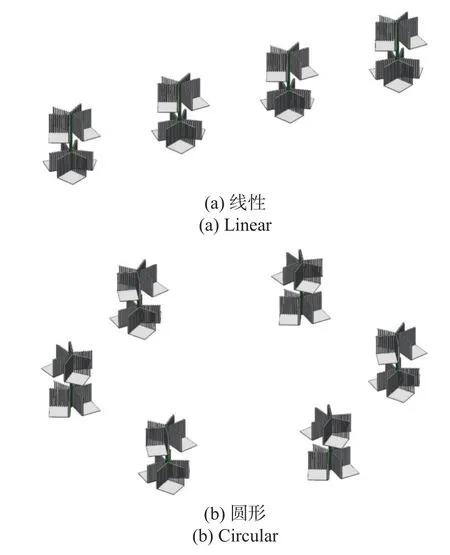
圖3 線性和圓形多級(jí)旋轉(zhuǎn)式角反射器陣列Fig.3 Circular multistage rotary corner reflection array
2 角反射器陣列RCS 特性分析
2.1 角反射器陣列單元RCS 特性仿真分析
角反射器陣列單元的RCS 特性可通過仿真進(jìn)行分析,對(duì)其反射葉片不同旋轉(zhuǎn)角度情況進(jìn)行建模及仿真計(jì)算.目前,目標(biāo)RCS 的估算方法主要有縮比模型法、實(shí)物實(shí)測(cè)法、數(shù)學(xué)分析建模法、軟件仿真計(jì)算法等[9-11].其中軟件仿真計(jì)算法以其計(jì)算精度高、成本耗費(fèi)低、條件要求少等優(yōu)點(diǎn)而得到快速發(fā)展及普遍應(yīng)用.CST 三維電磁場(chǎng)仿真軟件是針對(duì)目標(biāo)布局以及RCS 分析而研發(fā)的專業(yè)電磁場(chǎng)分析軟件,基于縝密的電磁場(chǎng)積分方程理論,以經(jīng)典的矩量法為計(jì)算基礎(chǔ),采用多層快速多級(jí)子算法,在保持精度的基礎(chǔ)上有效提升計(jì)算效率[12].此外,CST 軟件將矩量法、高頻分析法以及一致性繞射理論融合入仿真計(jì)算之中,因此對(duì)于分析目標(biāo)的RCS 等各類問題特別適合,是當(dāng)前國(guó)內(nèi)外電磁場(chǎng)研究使用最先進(jìn)的分析軟件之一.為驗(yàn)證多級(jí)旋轉(zhuǎn)式角反射器陣列的RCS 特性,利用CST 軟件進(jìn)行仿真計(jì)算,得到其RCS 變化曲線.
首先對(duì)角反射器陣列單元進(jìn)行仿真分析,角反射器邊長(zhǎng)為50 cm,其中兩個(gè)面均包含10 個(gè)反射葉片.設(shè)置反射葉片旋轉(zhuǎn)角度ω 為0°、30°、60°、90°四個(gè)工況,入射電磁波設(shè)定為遠(yuǎn)場(chǎng)平面波,波長(zhǎng)設(shè)定為30 mm(10 GHz),為國(guó)內(nèi)外常用雷達(dá)偵察頻段,垂直極化方式.
葉片旋轉(zhuǎn)角度ω 為0°、30°、60°、90°時(shí),仿真角反射器陣列單元RCS 特性,并根據(jù)可能的導(dǎo)彈來襲方向,選擇俯仰角θ 分別為30°、45°、60°時(shí)對(duì)陣列單元周向RCS 特性進(jìn)行分析,結(jié)果如圖4~7 所示.

圖4 角反射器陣列單元RCS 特性仿真結(jié)果(ω=0°)Fig.4 Simulation results of RCS characteristics of corner reflector array unit (ω=0°)

圖5 角反射器陣列單元RCS 特性仿真結(jié)果(ω=30°)Fig.5 Simulation results of RCS characteristics of corner reflector array unit (ω=30°)
圖6 角反射器陣列單元RCS 特性仿真結(jié)果(ω=60°)Fig.6 Simulation results of RCS characteristics of corner reflector array unit (ω=60°)
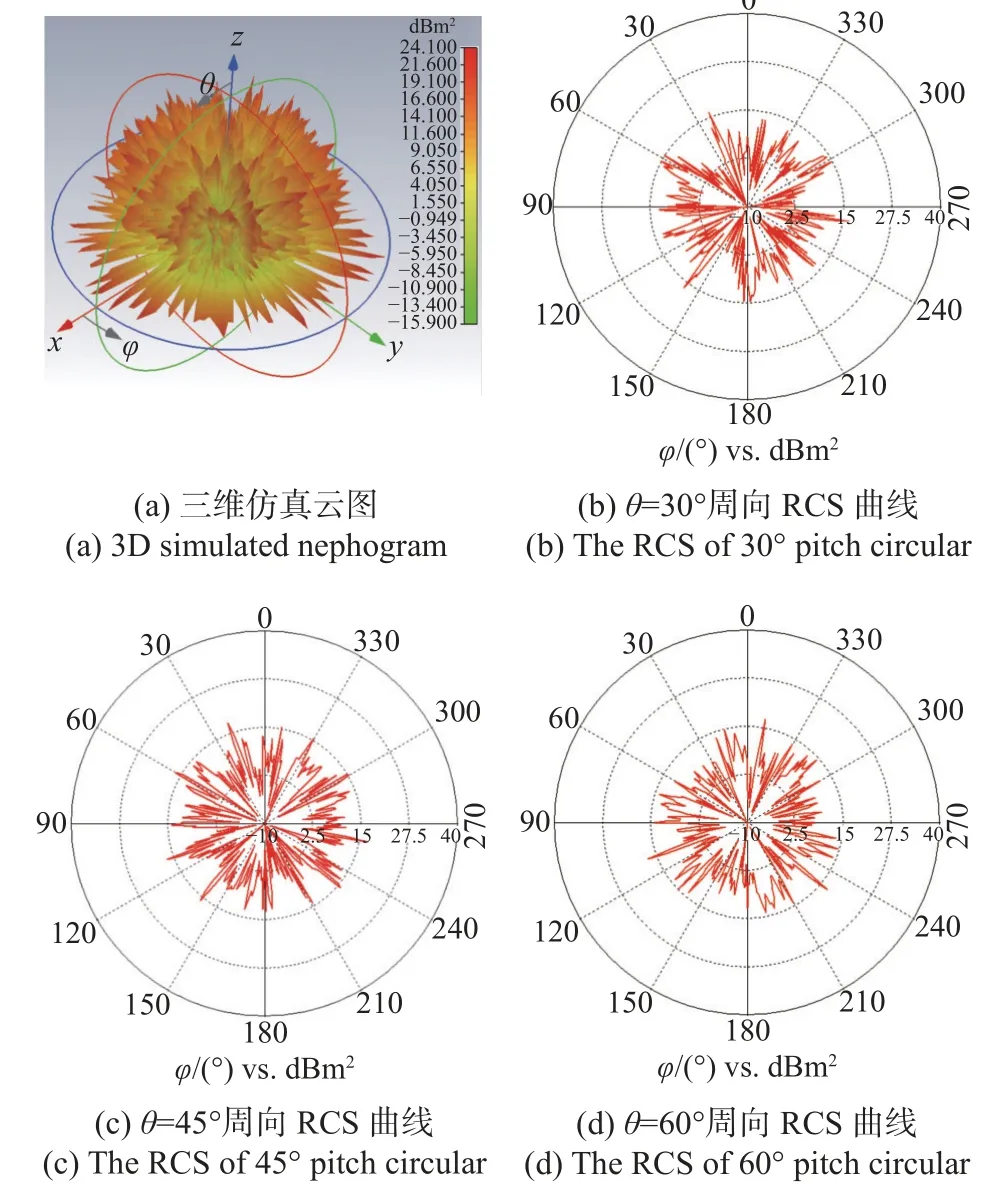
圖7 角反射器陣列單元RCS 特性仿真結(jié)果(ω=90°)Fig.7 Simulation results of RCS characteristics of corner reflector array unit (ω=90°)
從圖4~7 仿真結(jié)果可以看出,當(dāng)葉片旋轉(zhuǎn)角度為0°時(shí),角反射器陣列單元即為雙層六個(gè)正方形三面角反射器結(jié)構(gòu),其周向RCS 特性較強(qiáng)且在每個(gè)三面角反射器對(duì)稱軸(θ=45°)方向附近RCS 最大,周向平均值為28.7 dBm2,各角度特性較為均勻并呈現(xiàn)周期性變化,但反射特性較為單一.目前導(dǎo)彈抗干擾識(shí)別算法不斷發(fā)展,普通角反射器的反射特性較固定容易被識(shí)別濾除.隨葉片旋轉(zhuǎn)角度的增大,陣列單元的RCS 逐漸降低,在葉片旋轉(zhuǎn)至90°、45°俯仰時(shí)周向RCS 平均值最大,為5.99 dBm2,但角度特性更加復(fù)雜,無明顯規(guī)律性.因此角反射器可以通過反射葉片的角度旋轉(zhuǎn)對(duì)其RCS 進(jìn)行動(dòng)態(tài)調(diào)控,相比于傳統(tǒng)角反射器固定的RCS 特性,能夠增加導(dǎo)彈的識(shí)別難度,體現(xiàn)了角反射器干擾的靈活性.
2.2 多級(jí)旋轉(zhuǎn)式角反射器陣列RCS 特性仿真分析
分析得到單個(gè)角反射器陣列單元的RCS 特性后,假定由六個(gè)陣列單元,通過線性排布以及圓形排布兩種方式,組成多級(jí)旋轉(zhuǎn)式角反射器陣列,并通過仿真分析兩種陣列的RCS 特性.假定線性陣列中每個(gè)單元的間距以及圓形陣列直徑均為10 m,陣列單元內(nèi)的葉片旋轉(zhuǎn)角度均設(shè)定為30°,仿真結(jié)果如圖8和圖9 所示.

圖8 圓形多級(jí)旋轉(zhuǎn)式角反射器陣列RCS 特性仿真結(jié)果(ω=30°)Fig.8 Simulation results of RCS characteristics of circular multistage rotary corner reflector array (ω=30°)

圖9 線性多級(jí)旋轉(zhuǎn)式角反射器陣列RCS 特性仿真結(jié)果(ω=30°)Fig.9 Simulation results of RCS characteristics of linear multistage rotary corner reflector array (ω=30°)
由兩種陣列仿真結(jié)果可以看出,因每個(gè)陣列單元內(nèi)部三面角反射器在其對(duì)稱軸方向RCS 最大,所以陣列整體RCS 較大的方向也與該角度相關(guān).圓形陣列在單元布設(shè)的六個(gè)角度附近的RCS 特性較高,其他角度呈現(xiàn)連續(xù)起伏變化.而線性陣列則在線性排布以及垂直方向附近的RCS 特性最強(qiáng),其他角度方向也呈現(xiàn)連續(xù)起伏變化,仿真結(jié)果與陣列方式符合性較好.
3 角反射器陣列排布間隔尋優(yōu)分析
3.1 角反射器陣列排布設(shè)計(jì)
在實(shí)際使用中,通常根據(jù)對(duì)抗需求,利用大量的角反射器通過多種排布方式組成陣列[13].為了實(shí)現(xiàn)對(duì)不同重要目標(biāo)RCS 特性的模擬,提高防護(hù)效果,角反射器陣列的排布方式及排布間隔對(duì)于整個(gè)陣列的RCS 具有重要的影響,進(jìn)而影響整個(gè)陣列對(duì)目標(biāo)的防護(hù)效果[14].
本文針對(duì)線性及圓形兩種陣列排布方式,對(duì)多級(jí)旋轉(zhuǎn)式角反射器陣列的排布間隔進(jìn)行尋優(yōu)設(shè)計(jì)及分析.以線性陣列單元排布間隔以及圓形陣列排布直徑為分析變量參數(shù),角反射器陣列理論上可實(shí)現(xiàn)任意排布間隔的布放,但為了簡(jiǎn)化計(jì)算及對(duì)比分析,假定采用六個(gè)陣列單元組成陣列結(jié)構(gòu),陣列各單元排布間隔一致,通過分析兩種陣列在5 m、10 m、15 m、20 m、25 m、30 m 間隔情況下的RCS 特性,且因?yàn)閷?duì)地導(dǎo)彈威脅來襲角度主要為30°~60°[15],因此針對(duì)俯仰分別為30°、45°、60°情況下的周向RCS 平均值仿真結(jié)果進(jìn)行統(tǒng)計(jì).角反射器旋轉(zhuǎn)葉片角度設(shè)定為30°,分析排布間隔對(duì)兩種多級(jí)旋轉(zhuǎn)式角反射器陣列RCS 特性的影響.
基于以上假設(shè),構(gòu)建不同排布間隔的線性及圓形兩種多級(jí)旋轉(zhuǎn)式角反射器陣列模型,并通過CST 仿真軟件對(duì)其RCS 特性進(jìn)行分析.
3.2 角反射器陣列排布間隔仿真及分析
針對(duì)5 m、10 m、15 m、20 m、25 m、30 m 排布間隔的兩種角反射器陣列模型,基于垂直極化方式,得到軸向RCS 特性仿真結(jié)果.對(duì)比不同間隔的陣列周向RCS 特性及其平均值,統(tǒng)計(jì)結(jié)果如表1 所示.

表1 不同排布間隔角反射器陣列RCS 特性仿真結(jié)果Tab.1 Simulation results of RCS characteristics of reflector arrays with different configuration interval
因?yàn)樵谡鎸?shí)戰(zhàn)場(chǎng)環(huán)境中威脅來襲方向具有隨機(jī)性,所以RCS 平均值更能反映陣列的干擾防護(hù)效果.由表1 可知,各排布間隔條件下,陣列均在45°俯仰角度的周向RCS 平均值最大,這是因?yàn)殛嚵袃?nèi)部三面角反射器的對(duì)稱軸在45°方向,這也是角反射器RCS 最大的方向.并且隨著排布間隔的增大,線性及圓形兩種多級(jí)旋轉(zhuǎn)式角反射器陣列的RCS 特性不斷變化.考慮到仿真計(jì)算量及篇幅限制,本文對(duì)排布間隔的分析范圍相對(duì)有限,通過對(duì)比分析得到,在本文中選擇的5~30 m 排布間隔范圍內(nèi)以及設(shè)定的計(jì)算條件下,線性陣列的平均RCS 最大為16.80 dBm2,此時(shí)單元間距為5 m;圓形陣列的平均RCS 最大值為21.13 dBm2,此時(shí)單元間距為20 m.
4 結(jié) 論
本文從角反射器陣列對(duì)地面重要目標(biāo)的防護(hù)需求角度出發(fā)[16],為了提高角反射器陣列RCS 特性的靈活性,基于可旋轉(zhuǎn)葉片設(shè)計(jì)了一種RCS 特性可調(diào)角反射器結(jié)構(gòu),并利用六個(gè)該角反射器結(jié)構(gòu)組成角反射器陣列單元,通過CST 電磁仿真軟件對(duì)葉片不同旋轉(zhuǎn)角度情況下陣列單元的RCS 特性進(jìn)行了分析.此外設(shè)定了由六個(gè)角反射器陣列單元組成的線性及圓形多級(jí)旋轉(zhuǎn)式角反射器陣列結(jié)構(gòu),對(duì)整個(gè)陣列不同俯仰角度的周向RCS 特性及5~30 m 的排布間隔進(jìn)行了研究分析.多級(jí)旋轉(zhuǎn)式角反射器陣列的RCS 靈活可變,為地面重要目標(biāo)的末端防護(hù)提供了一種新思路.
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
