多路徑誤差對BDS-3變形監測精度的影響
2024-01-25 12:46:36史俊波茍勁松郭際明鄒進貴
大地測量與地球動力學 2024年2期
關鍵詞:變形
侯 誠 史俊波 茍勁松 郭際明 鄒進貴
1 武漢大學測繪學院,武漢市珞喻路129號,430079
2020-07-31 BDS-3系統的正式開通標志著我國衛星導航系統的發展進入新階段[1]。隨著BDS-3系統的建成和國家“十四五”政策的引領,針對BDS-3的應用研究逐漸成為熱點[2-7]。觀測環境開闊無遮擋是實現BDS-3高精度定位的條件之一,但在實際應用中,并非所有北斗監測站點都能處于開闊環境中。
許多學者針對多路徑誤差的定量分析、定位影響和削弱算法等展開研究[8-14],但這些研究大多圍繞BDS-2應用和BDS-3實驗展開,針對實際工程應用中BDS-3多路徑誤差與變形監測精度相關性的研究較少。基于此,本文選取2022年doy221~348共128 d的某水利工程變形監測數據,研究各站點BDS-3觀測值多路徑誤差及監測精度的變化規律,并分析二者的相關性。本文結果有助于“北斗+”高精度變形監測應用的推廣。
1 分析方法
為定量分析BDS-3觀測值多路徑誤差對變形監測精度的影響,本文從多路徑誤差計算、變形監測精度計算及多路徑誤差和監測精度的相關性分析三方面展開研究。
1.1 多路徑誤差計算
多路徑誤差反映的是觀測信號在對應頻率上受多路徑效應的影響,多路徑誤差值越小,接收機抗多路徑效應的能力越強。多路徑誤差計算公式如下[15]:
(1)
式中,Pi為第i頻率上的偽距觀測值;φi、φj分別為第i和第j頻率上的相位觀測值;α為第i和第j頻率fi、fj之比的平方,即α=(fi/fj)2。
1.2 變形監測精度計算
(2)
(3)
式中,Δy為N、E、U某一方向的殘差,n為觀測值樣本數。
1.3 相關性分析
多路徑誤差與變形監測精度的相關系數r計算公式如下:
(4)

2 結果與分析
2.1 數據描述
為探究多路徑誤差對BDS-3變形監測精度的影響,選擇某水利工程變形監測應用采集的BDS-3觀測數據進行分析。該監測應用共布設1個基準站(#JZ)和6個監測點(#01~#06),最遠的監測點(#06)距離基準站約6 km,具體點位分布如圖1所示。

圖1 BDS-3變形監測站點點位分布
硬件方面,基準站采用的天線為華信HX-CGX601A帶扼流圈天線,6個監測站點的天線為華信HXCGPS1000,所有接收機均支持BDS/GPS/GLONASS/GALILEO全頻點信號。本文選擇BDS-3 B1I和B3I觀測值計算變形量,選擇2022年doy221~348共128 d數據進行研究。
2.2 多路徑誤差分析
本文基準站周圍多路徑誤差分析分為2個階段:監測前半段(doy221~284,共64 d)周圍的樹枝越長越茂盛,如圖2(a)所示;在 doy284對樹枝進行裁剪,如圖2(b)所示。

圖2 基準站周圍樹枝裁剪前后現場圖
圖3為基準站監測期間BDS-3 B1I和B3I觀測值多路徑誤差序列。由圖可見,裁剪樹枝前基準站B1I和B3I觀測值的多路徑誤差分別約為0.4 m和0.7 m;裁剪樹枝后B1I和B3I觀測值的多路徑誤差明顯降低,約為0.2 m和0.3 m,較之前減少50%。圖4為7個站點的平均多路徑誤差,由圖可見,周邊樹木的變化對基準站的多路徑誤差有顯著影響;由于其他6個監測點周圍的觀測環境沒有改變,因此多路徑誤差無明顯變化。

圖3 基準站北斗B1I和B3I觀測值的多路徑誤差序列
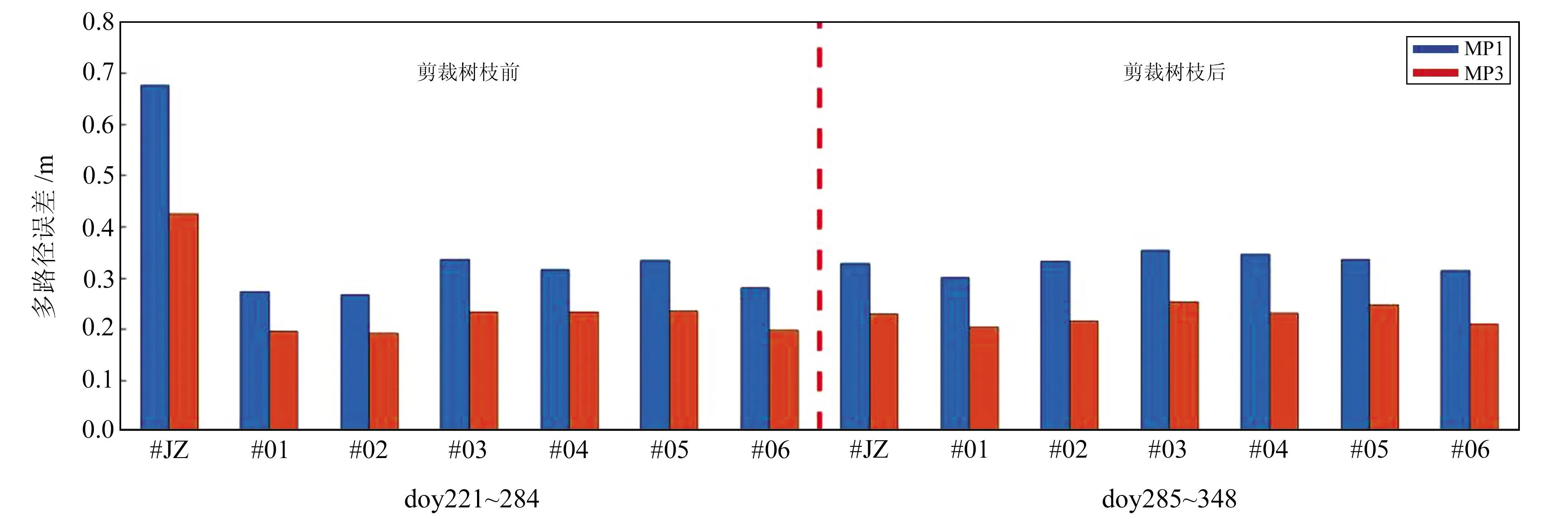
圖4 所有站點多路徑誤差
2.3 監測精度分析
本文分別采用BDS-3 B1I和B3I單頻觀測值解算的監測模式,獲取6個監測點N、E、U方向的變形序列。以監測點#04的B1I觀測值結果為例,圖5為變形量時間序列,由圖可見:1)在doy284裁剪樹枝前所有監測點的變形序列波動較大;2)doy284裁剪樹枝后所有監測點各方向的變形序列曲線趨于平穩。

圖5 使用北斗B1I觀測值的變形監測原始序列
針對圖5的變形監測序列,選用4階多項式擬合獲取趨勢項,用原始監測序列減去擬合曲線得到監測殘差序列,結果如圖6所示。由圖可見:1)doy284前各方向的殘差波動較大,多在±6.0 mm范圍內波動;doy284后殘差波動變小,在±2.0 mm范圍內波動;2)裁剪樹枝前B1I觀測值在N、E、U方向的監測精度分別為2.1 mm、2.1 mm、3.8 mm,裁剪樹枝后監測精度分別為0.5 mm、0.5 mm、0.9 mm。
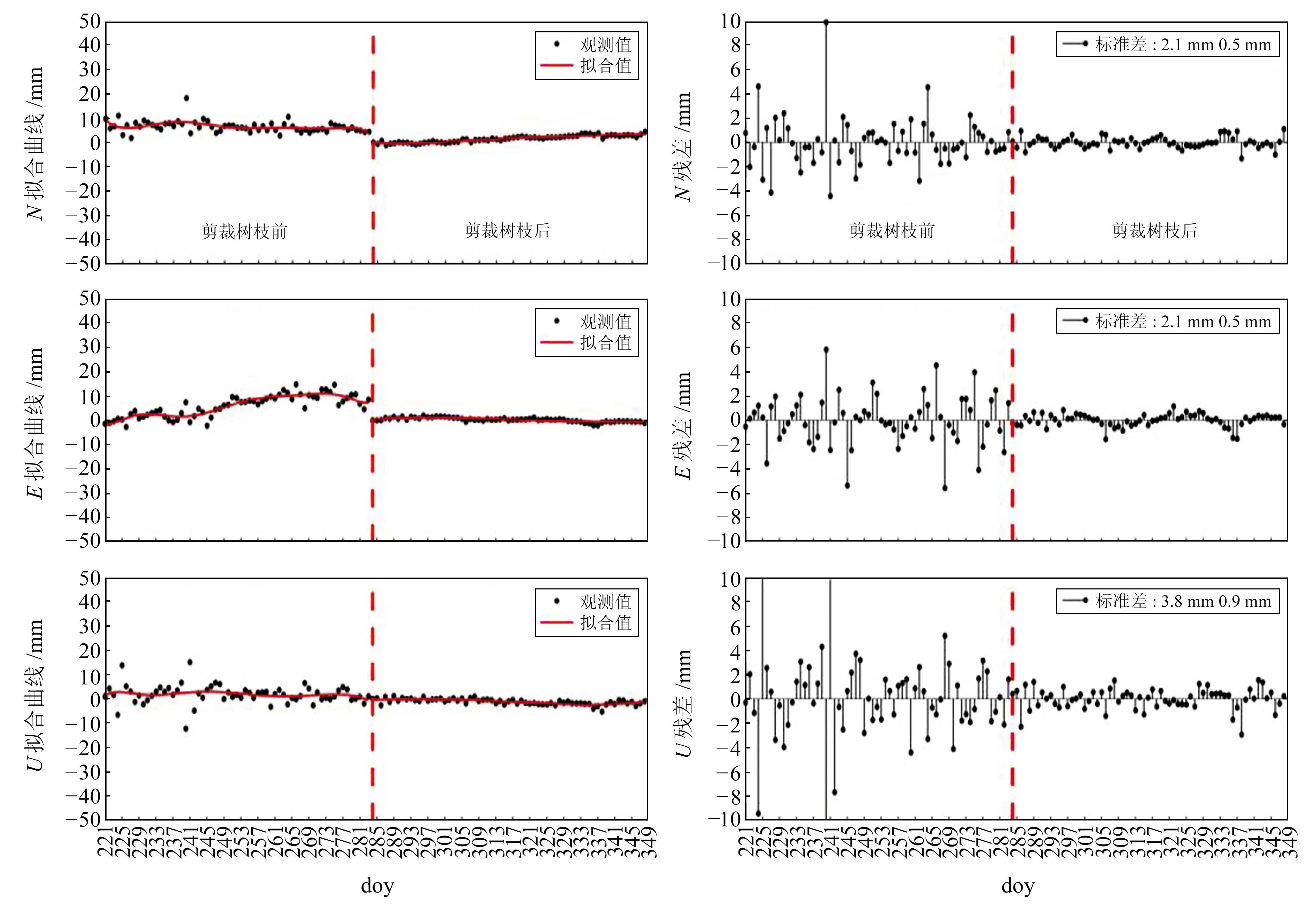
圖6 使用北斗B1I觀測值的變形監測擬合序列和殘差序列
圖7為所有6個監測點使用B1I和B3I觀測值在N、E、U方向的監測精度,圖8為平均監測精度。由圖可見:
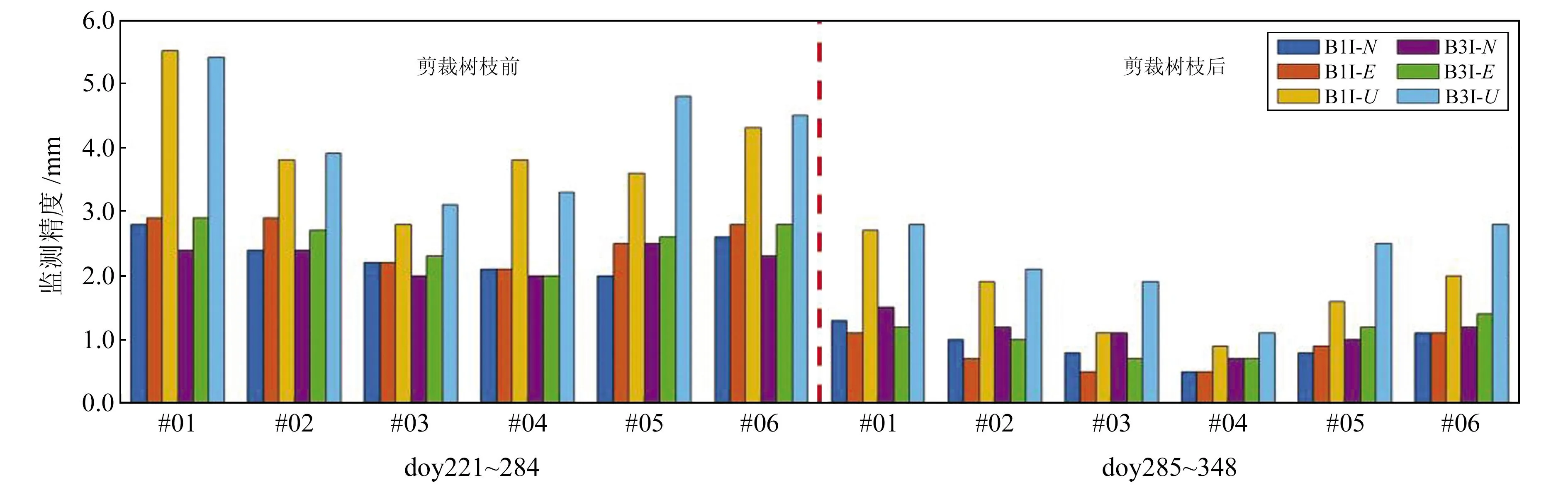
圖7 裁剪樹枝前后N、E、U方向所有監測點的監測精度比較
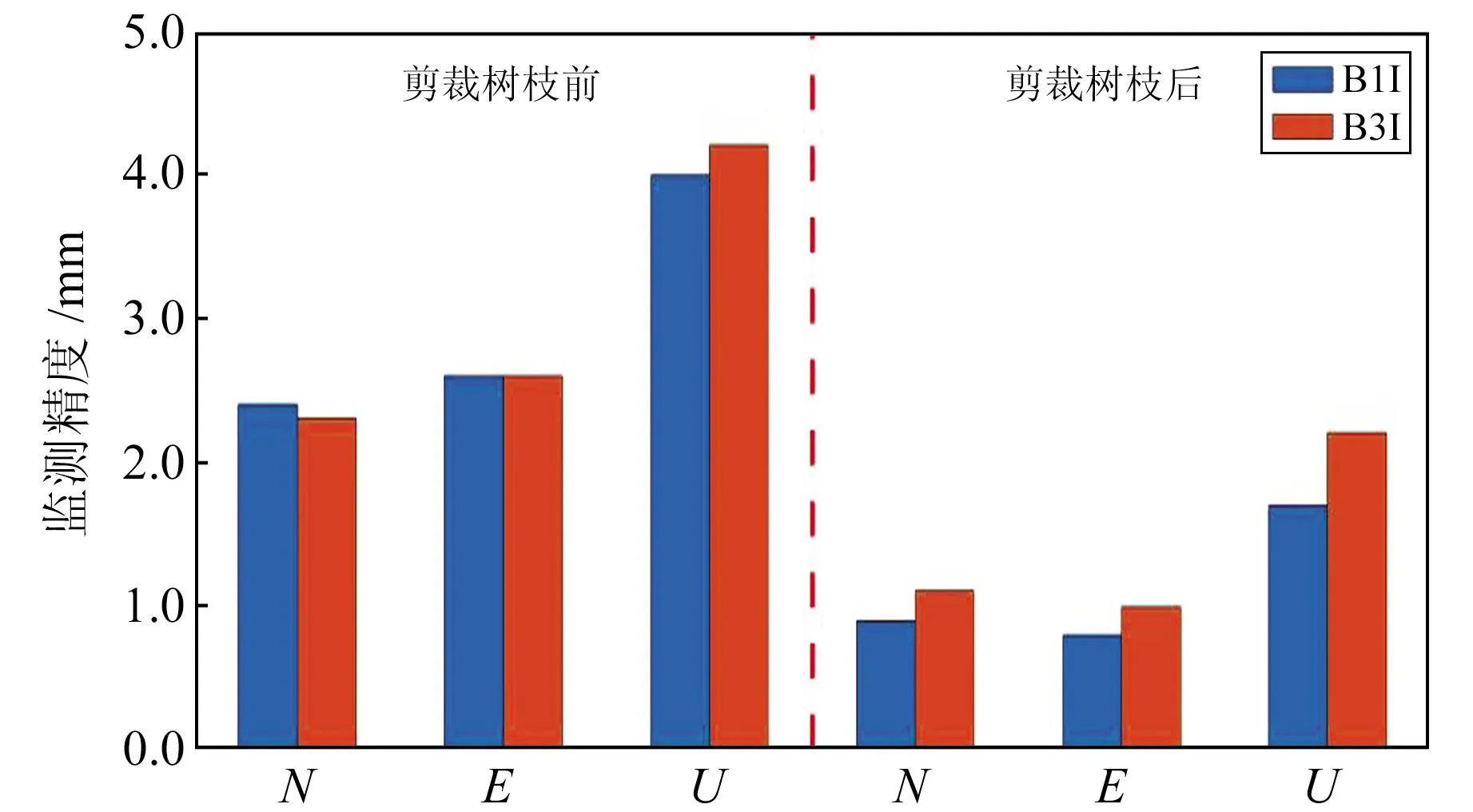
圖8 裁剪樹枝前后的N、E、U方向平均監測精度比較
1)裁剪樹枝前基準站多路徑誤差較大。N、E方向6個監測點使用B1I和B3I觀測值的監測精度為2.0~3.0 mm,平均監測精度為2.4 mm、2.6 mm(B1I)和2.3 mm、2.6 mm(B3I);U方向使用B1I和B3I觀測值監測精度為3.0~6.0 mm,平均監測精度分別為4.0 mm和4.2 mm。裁剪樹枝后,基準站多路徑誤差大幅降低:N、E方向使用B1I和B3I觀測值的監測精度均優于2.0 mm,平均監測精度分別提高至0.9 mm、0.8 mm(B1I)和1.1 mm、1.0 mm(B3I);U方向使用B1I和B3I觀測值的監測精度均優于3.0 mm,平均精度分別提高至1.7 mm和2.2 mm。
2)裁剪樹枝前使用B1I和B3I觀測值的監測精度相當,但裁剪樹枝后多路徑誤差的影響被極大削弱,監測精度的規律更加明顯。監測點距離基準站越近、監測精度越高,且B1I觀測值的監測精度優于B3I觀測值。該結論與中國衛星導航系統管理辦公室公布的北斗B1I、B3I定位服務測試評價一致[16]。
2.4 相關性分析
按照式(4)對B1I和B3I觀測值的多路徑誤差與對應的BDS-3監測精度進行相關性分析,得到的相關系數統計見表1和圖9。可以看出:1)對于同類型觀測值,水平和高程的監測精度與多路徑誤差存在強相關性,相關系數分別高達0.93和0.81。與高程監測精度相比,水平監測精度與多路徑誤差的相關系數更高;2)對于不同類型觀測值,使用B1I觀測值的監測精度與多路徑誤差的相關系數大于使用B3I觀測值。
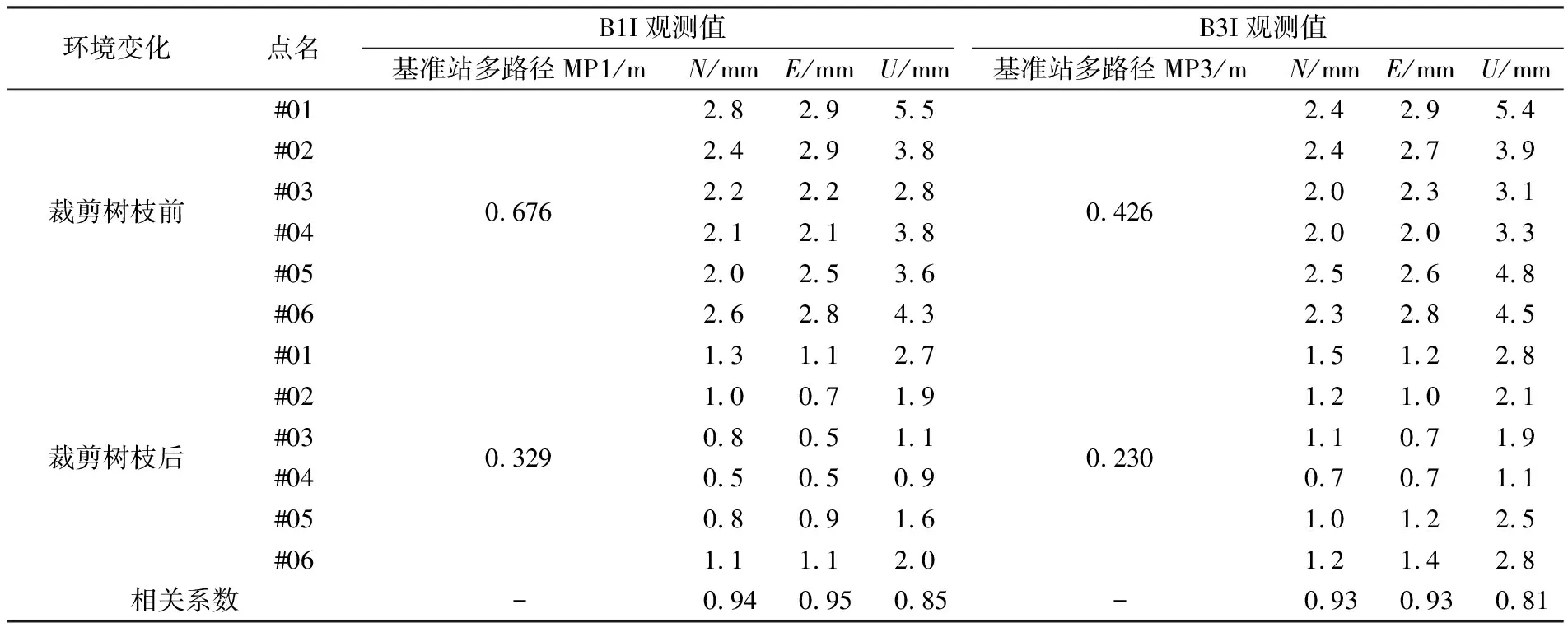
表1 BDS-3 B1I/B3I觀測值多路徑誤差與監測精度的相關系數統計

圖9 不同類型觀測值的多路徑誤差與監測精度相關系數比較
3 結 語
1)監測站點周圍樹木遮擋導致的多路徑誤差和BDS-3水平/高程監測精度的相關系數分別高達0.93和0.81,說明多路徑誤差與BDS-3變形監測精度之間存在強相關性。
2)裁剪樹枝前,使用B1I和B3I觀測值在N、E、U方向的平均監測精度分別為2.4 mm、2.6 mm、4.0 mm和2.3 mm、2.6 mm、4.2 mm;裁剪樹枝后,使用B1I和B3I觀測值在N、E、U方向的平均監測精度分別為0.9 mm、0.8 mm、1.7 mm和1.1 mm、1.0 mm、2.2 mm。各方向的總體精度分別提高63%、69%、58%(B1I)和52%、61%、48%(B3I)。
3)通過改變周圍觀測環境削弱多路徑誤差對變形監測結果的影響后,B1I觀測值的監測結果要優于B3I觀測值。因此,在短基線變形監測應用中推薦使用B1I觀測值。
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36