基于H橋驅(qū)動(dòng)的空心杯電機(jī)控制研究
2024-01-26 02:32:48孫耀程方文逸
微特電機(jī) 2023年12期
錢(qián) 兒, 孫耀程, 方文逸
(中國(guó)電子科技集團(tuán)公司第二十一研究所,上海 200233)
0 引 言
空心杯直流有刷電機(jī)以其優(yōu)異的響應(yīng)特性,被廣泛應(yīng)用于各類(lèi)執(zhí)行機(jī)構(gòu)。這類(lèi)執(zhí)行機(jī)構(gòu)一般需要對(duì)電機(jī)進(jìn)行轉(zhuǎn)速及轉(zhuǎn)向的控制。直流有刷電機(jī)通過(guò)給定電壓進(jìn)行轉(zhuǎn)速控制,通過(guò)供電正負(fù)極性進(jìn)行轉(zhuǎn)向控制。在實(shí)際使用中,多采用H橋結(jié)合PWM調(diào)制完成對(duì)直流有刷電機(jī)的轉(zhuǎn)速及轉(zhuǎn)向控制。空心杯電機(jī)的特點(diǎn)是沒(méi)有傳統(tǒng)的轉(zhuǎn)子鐵心,線圈象杯子一樣,完全由導(dǎo)線繞制而成,轉(zhuǎn)子質(zhì)量大幅降低,具備較小的機(jī)械常數(shù)及電氣常數(shù)。為了發(fā)揮空心杯電機(jī)的優(yōu)勢(shì),可以對(duì)H橋結(jié)合PWM調(diào)制的驅(qū)動(dòng)模式進(jìn)行比較分析,制定最優(yōu)的控制方法。
1 H橋控制直流電機(jī)方式
H橋控制由4個(gè)功率器件組成,以4個(gè)N型MOS管為例,其主功率電路如圖1所示。其中Q1~Q4為4個(gè)N型MOS管,D1~D4為4個(gè)續(xù)流二極管。
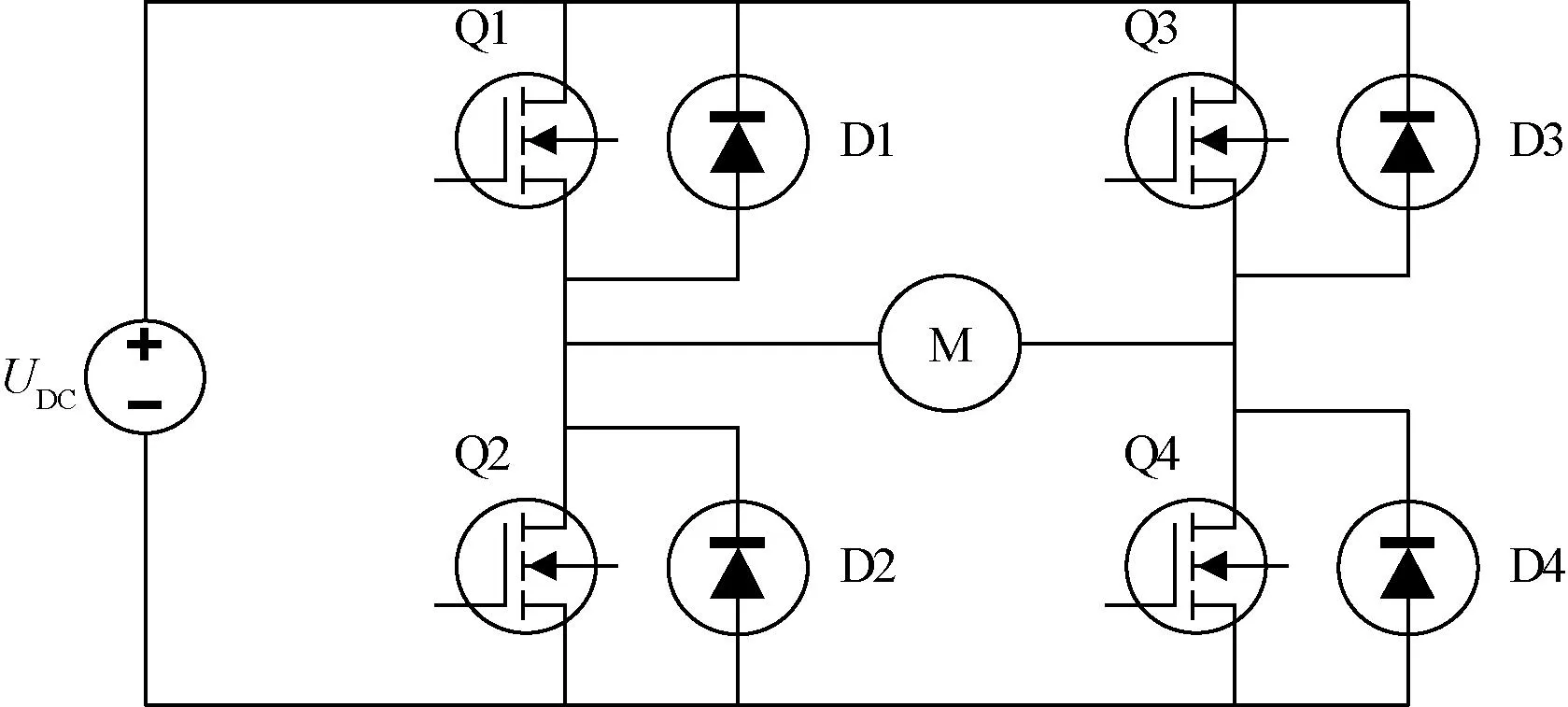
圖1 H橋電路結(jié)構(gòu)
當(dāng)圖1中Q1和Q4開(kāi)通、Q2和Q3關(guān)斷時(shí),電流方向如圖2箭頭所示,從電源正極由Q1從左至右穿過(guò)電機(jī),然后再經(jīng)過(guò)Q4回來(lái)電源負(fù)極,在該流向的電流驅(qū)動(dòng)下,電機(jī)將沿著正方向轉(zhuǎn)動(dòng)。
同理可得,當(dāng)圖1中Q1和Q4關(guān)斷、Q2和Q3開(kāi)通時(shí),電機(jī)反轉(zhuǎn),電流方向如圖3所示。

圖2 正向電流示意圖
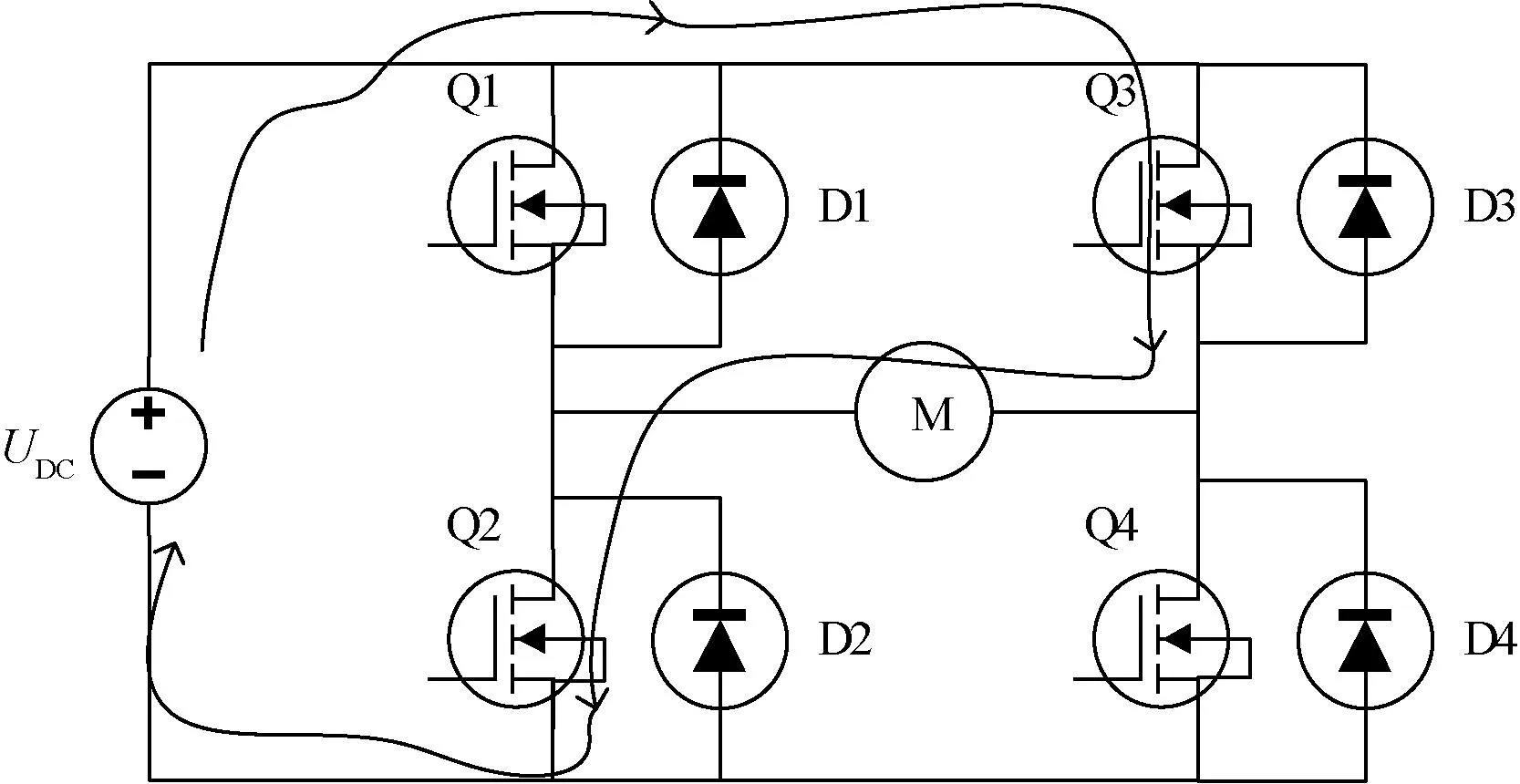
圖3 反向電流示意圖
在H橋驅(qū)動(dòng)器的設(shè)計(jì)過(guò)程中需要注意兩點(diǎn):第一點(diǎn)是避免兩個(gè)同側(cè)的MOS管出現(xiàn)同時(shí)導(dǎo)通的情況,這種情況會(huì)使兩個(gè)MOS管將電源正極和負(fù)極短接,電流直接穿過(guò)橋臂,達(dá)到最大值,瞬間損壞MOS管和電源;第二點(diǎn)是為了確保H橋兩個(gè)橋臂的高端MOS管可靠導(dǎo)通,需要設(shè)計(jì)自舉電路來(lái)滿(mǎn)足MOS管的驅(qū)動(dòng)要求,設(shè)計(jì)方法可參照相關(guān)文獻(xiàn)[1-2]。
PWM脈寬調(diào)制是電子電力應(yīng)用中非常重要和常用的一種控制技術(shù),通過(guò)伏秒平衡,可以實(shí)現(xiàn)脈沖波形對(duì)連續(xù)參考波形進(jìn)行等效,完成控制系統(tǒng)對(duì)變換器的控制輸出。
2 H橋驅(qū)動(dòng)模式分析
通過(guò)Q1/Q4 與Q2/Q3 兩組MOS管導(dǎo)通邏輯的切換可以控制電機(jī)轉(zhuǎn)動(dòng),對(duì)旋轉(zhuǎn)方向和速度的調(diào)節(jié)可以通過(guò)控制信號(hào)的PWM斬波控制來(lái)實(shí)現(xiàn)。
電機(jī)的轉(zhuǎn)速主要通過(guò)調(diào)節(jié)占空比實(shí)現(xiàn),占空比越大,施加在電機(jī)電樞上的平均電壓就越大,電機(jī)的轉(zhuǎn)速越高。實(shí)現(xiàn)占空比的PWM載波頻率一般設(shè)置在5~50 kHz之間。低頻率會(huì)到導(dǎo)致低轉(zhuǎn)速下噪聲較大,而頻率過(guò)高不僅考驗(yàn)控制芯片的處理能力,也會(huì)增加MOS管的開(kāi)關(guān)損耗,降低效率。
根據(jù)兩個(gè)橋臂、四個(gè)MOS管不同的PWM觸發(fā)機(jī)制,H橋空心杯直流有刷電機(jī)的驅(qū)動(dòng)方式主要有三種控制模式:受限單極模式(PWM-OFF),單極模式(PWM單極互補(bǔ)),雙極模式(PWM雙極互補(bǔ))[3-5]。
(1)受限單極模式(PWM-OFF)
如圖4所示,當(dāng)Q2和Q3關(guān)斷時(shí),Q4常開(kāi),Q1工作在PWM模式,電流方向如圖4箭頭所示,電機(jī)將沿著正方向轉(zhuǎn)動(dòng)。同理,可分析圖4的反轉(zhuǎn)邏輯。
這種控制方法在H橋驅(qū)動(dòng)電機(jī)正轉(zhuǎn)(或反轉(zhuǎn))過(guò)程中,施加給電機(jī)的電壓極性是單一的。優(yōu)點(diǎn)是電路結(jié)構(gòu)和控制邏輯簡(jiǎn)單明,缺點(diǎn)是電機(jī)不能產(chǎn)生反向力矩,不能有效抑制速度靜差,調(diào)速性能較差。
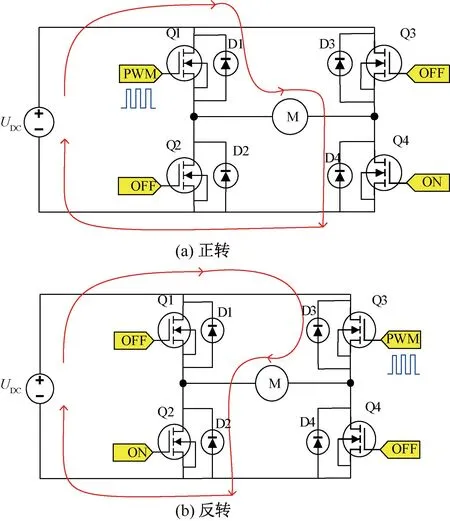
圖4 受限單極模式(PWM-OFF)
(2)單極模式(PWM單極互補(bǔ))
如圖5所示,當(dāng)Q3關(guān)斷時(shí),Q4常開(kāi),Q1工作在PWM模式,Q2也工作在PWM模式,但是開(kāi)關(guān)邏輯和Q1互補(bǔ),電流方向如圖5箭頭所示,電機(jī)將沿著正方向轉(zhuǎn)動(dòng)。同理,可分析圖5的反轉(zhuǎn)邏輯。

圖5 單極模式(PWM單極互補(bǔ))
這種控制方法不同于上一種驅(qū)動(dòng)模式,該方法在PWM上橋臂關(guān)斷,下橋臂導(dǎo)通的狀態(tài)下可以給自舉電路的電容進(jìn)行充電,保證MOS管可靠導(dǎo)通。優(yōu)點(diǎn)是起動(dòng)快,工作可靠,占空比調(diào)節(jié)范圍寬泛。缺點(diǎn)是電機(jī)剎車(chē)過(guò)程中,速度接近零速是沒(méi)有制動(dòng)力矩或力矩極小,動(dòng)態(tài)性能略遜雙極模式。
(3)雙極模式(PWM雙極互補(bǔ))
如圖6所示,當(dāng)Q1~Q4均工作在PWM模式,其中,PWM1和PWM1N、PWM2和PWM2N是互補(bǔ)通道,PWM1和PWM2同開(kāi)關(guān)周期,占空比相同,但是極性相反,因此H橋電路拓?fù)渲刑幱趯?duì)角線的兩個(gè)MOS管將同時(shí)導(dǎo)通,同時(shí)關(guān)斷。圖6箭頭所示為電機(jī)反轉(zhuǎn)時(shí),為Q1Q4關(guān)斷、Q2Q3導(dǎo)通狀態(tài)下的電流方向。

圖6 雙極模式(PWM雙極互補(bǔ))
不同于前兩種控制方式,該方法在H橋驅(qū)動(dòng)電機(jī)正轉(zhuǎn)(或反轉(zhuǎn))的過(guò)程中,施加給電機(jī)的電壓極性是正負(fù)交替的,因此可以產(chǎn)生正負(fù)轉(zhuǎn)矩,當(dāng)占空比為50%時(shí),施加給電機(jī)的平均電壓為0,電機(jī)停止;占空比大于50%時(shí),電機(jī)正轉(zhuǎn);占空比小于50%時(shí),電機(jī)反轉(zhuǎn)。
該控制方式的優(yōu)點(diǎn)是動(dòng)態(tài)性能好,調(diào)速精度高,調(diào)速范圍寬,靜差小。缺點(diǎn)是控制電路復(fù)雜,電路開(kāi)關(guān)損耗大,發(fā)熱比較嚴(yán)重。
3 計(jì)算與分析
如上所述,H橋?qū)χ绷麟姍C(jī)的PWM控制方式有三種,其中受限單極模式和單極模式的控制過(guò)程類(lèi)同,統(tǒng)稱(chēng)為單極模式,區(qū)別于雙極模式,本文主要對(duì)電機(jī)零速附近控制過(guò)程進(jìn)行計(jì)算分析。在分析之前,作如下假設(shè):驅(qū)動(dòng)鏈路上的電子器件均為理想器件;PWM 斬波周期遠(yuǎn)小于電機(jī)的時(shí)間常數(shù);系統(tǒng)工作在準(zhǔn)穩(wěn)定工作狀態(tài),電樞電流ia呈周期性脈動(dòng)變化;電機(jī)轉(zhuǎn)速近似為零。
3.1 單極模式
對(duì)應(yīng)圖4和圖7,在t1階段,Q1和Q4導(dǎo)通,電流經(jīng)電源正極經(jīng)Q1、電機(jī)、Q4回到電源負(fù)極。電樞回路方程:
(1)
式中:Ud為電源電壓;La為電樞電感;Ra為電樞電阻;Ea為反電動(dòng)勢(shì)。
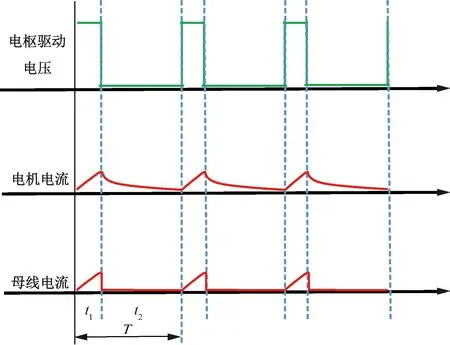
圖7 單極模式驅(qū)動(dòng)過(guò)程示意圖

圖8 雙極模式驅(qū)動(dòng)過(guò)程示意圖
在t2階段,電機(jī)繞組線圈產(chǎn)生的感應(yīng)電動(dòng)勢(shì)使得Q2的反向二極管D2導(dǎo)通,電流經(jīng)電機(jī)負(fù)端經(jīng)Q4、D2回到電機(jī)正端。電樞回路方程:
(2)
3.2 雙極模式
對(duì)應(yīng)圖6和圖8,在t1階段,Q1和Q4導(dǎo)通,電流經(jīng)電源正極經(jīng)Q1、電機(jī)、Q4回到電源負(fù)極。電樞回路方程為式(1)。
在t2階段,Q3和Q2導(dǎo)通,電流經(jīng)電源正極經(jīng)Q3、電機(jī)、Q2回到電源負(fù)極。電樞回路方程:
(3)
式中:Ra=0.582 Ω,La=0.191 mH,Ud=50 V,PWM斬波周期為 20 μs。假設(shè)零速附近反電動(dòng)勢(shì)為零,對(duì)式(1)~式(3)進(jìn)行求解可得:在零速附近,若占空比為5%,單極模式電流ia最大值約為0.26 A ;若占空比為10%,ia最大值約為0.52 A ,ia增大較快,減小過(guò)程較為遲緩。雙極模式下,低速狀態(tài),若占空比為55%,電流ia最大值約1.4 A,最小值約-1.16 A,峰峰值約2.56 A。顯然,雙極模式下的電流ia峰值較大,且處于快速交變的狀態(tài)。
4 測(cè)試對(duì)比
根據(jù)空心杯直流有刷電機(jī)的驅(qū)動(dòng)控制原理,搭建一套基于全國(guó)產(chǎn)化設(shè)計(jì)的空心杯直流有刷電機(jī)驅(qū)動(dòng)器[6-7],以國(guó)產(chǎn)高性能小型化嵌入式芯片GD32F103作為主控芯片[8-9],配合國(guó)產(chǎn)BUCK電源芯片、國(guó)產(chǎn)運(yùn)放等其他元器件來(lái)實(shí)現(xiàn)電機(jī)控制和接口設(shè)計(jì),功率器件采用低導(dǎo)通內(nèi)阻的國(guó)產(chǎn)化MOSFET器件NCEP068N10 G結(jié)合FD2203 S預(yù)驅(qū)來(lái)實(shí)現(xiàn)電機(jī)驅(qū)動(dòng),導(dǎo)通壓降小,可以實(shí)現(xiàn)98%的電壓輸出比例指標(biāo)。驅(qū)動(dòng)器輸入電壓為50 V,可以實(shí)現(xiàn)最大電流15 A以上的輸出,最大功率達(dá)到750 W。實(shí)驗(yàn)電機(jī)選用一臺(tái)MAXON 公司的空心杯有刷電機(jī),電機(jī)電樞電阻為0.582 Ω,電樞電感為0.191 mH。驅(qū)動(dòng)器實(shí)物與測(cè)試硬件平臺(tái)如圖9所示。

圖9 國(guó)產(chǎn)化空心杯直流有刷電機(jī)驅(qū)動(dòng)器
(1)受限單極模式(PWM-OFF)測(cè)試波形
圖10為該模式下,10%的占空比信號(hào)和電機(jī)電樞電流波形。由于空心杯電機(jī)電樞電感較小,電機(jī)電樞電流增大過(guò)程較快,減小過(guò)程比較平緩。
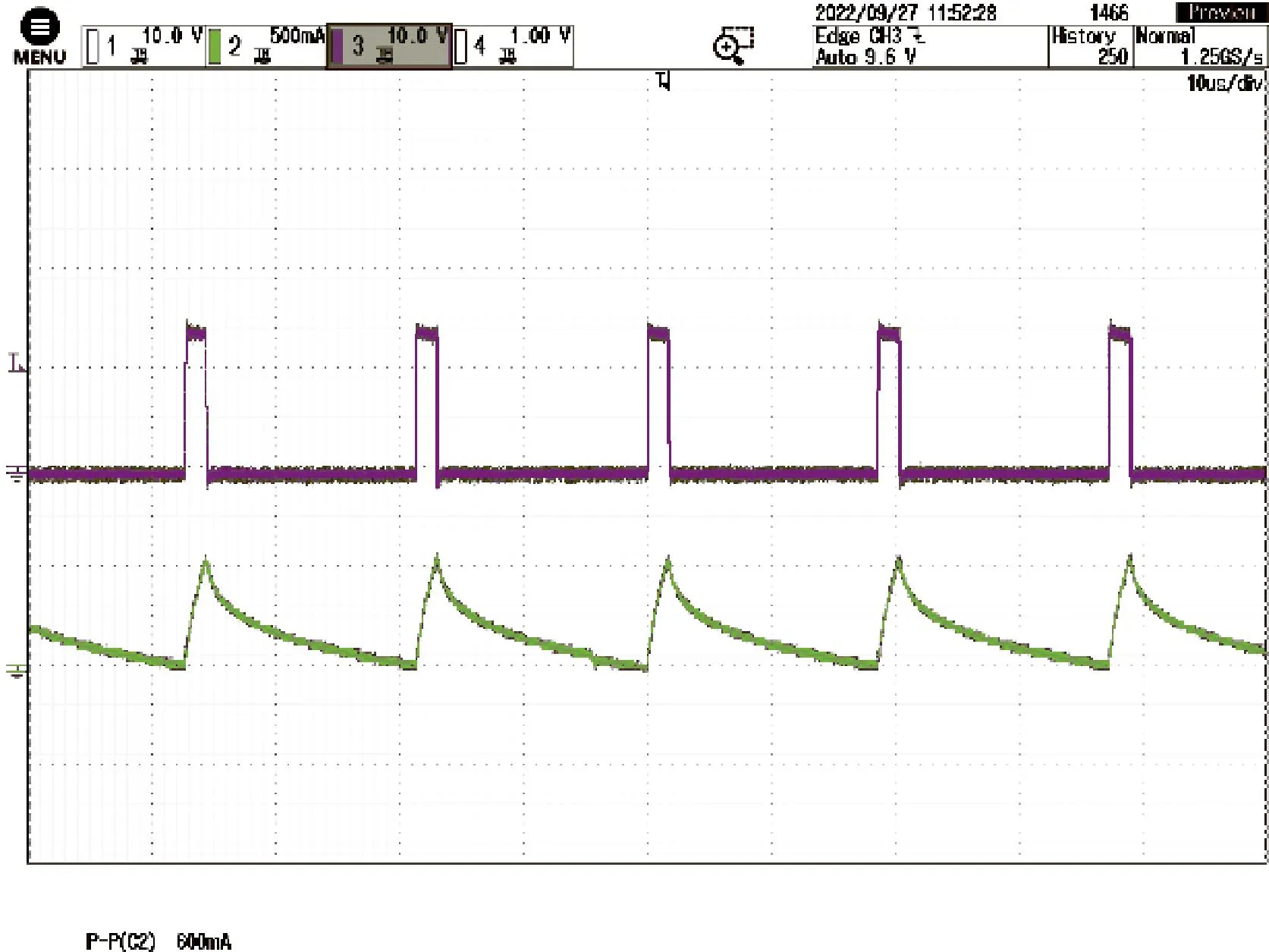
圖10 受限單極模式10%占空比信號(hào)和電樞電流
圖11為95%占空比信號(hào)下自舉電容電壓、電機(jī)電樞電流以及MOS管柵極電壓的測(cè)試波形。顯然在占空比達(dá)到95%,自舉電容沒(méi)有充電回路的情況下,自舉電壓會(huì)快速降低,無(wú)法持續(xù)保持驅(qū)動(dòng)能力。

圖11 受限單極模式95%占空比自舉電容電壓和電流
(2)單極模式(PWM單極互補(bǔ))測(cè)試波形
在單極模式(PWM單極互補(bǔ))模式下,10%占空比信號(hào)和電樞電流的波形如圖12所示。與受限單極模式波形相同。圖13為95%的占空比信號(hào)下,PWM信號(hào)與自舉電容電壓波形。在占空比達(dá)到95%的情況下,自舉電容電壓仍然保持穩(wěn)定,滿(mǎn)足驅(qū)動(dòng)MOS管要求的水平,H橋可按照占空比信號(hào)向電機(jī)施加電壓,產(chǎn)生連續(xù)的電樞電流。

圖12 PWM單極互補(bǔ)模式10%占空比信號(hào)和電樞電流
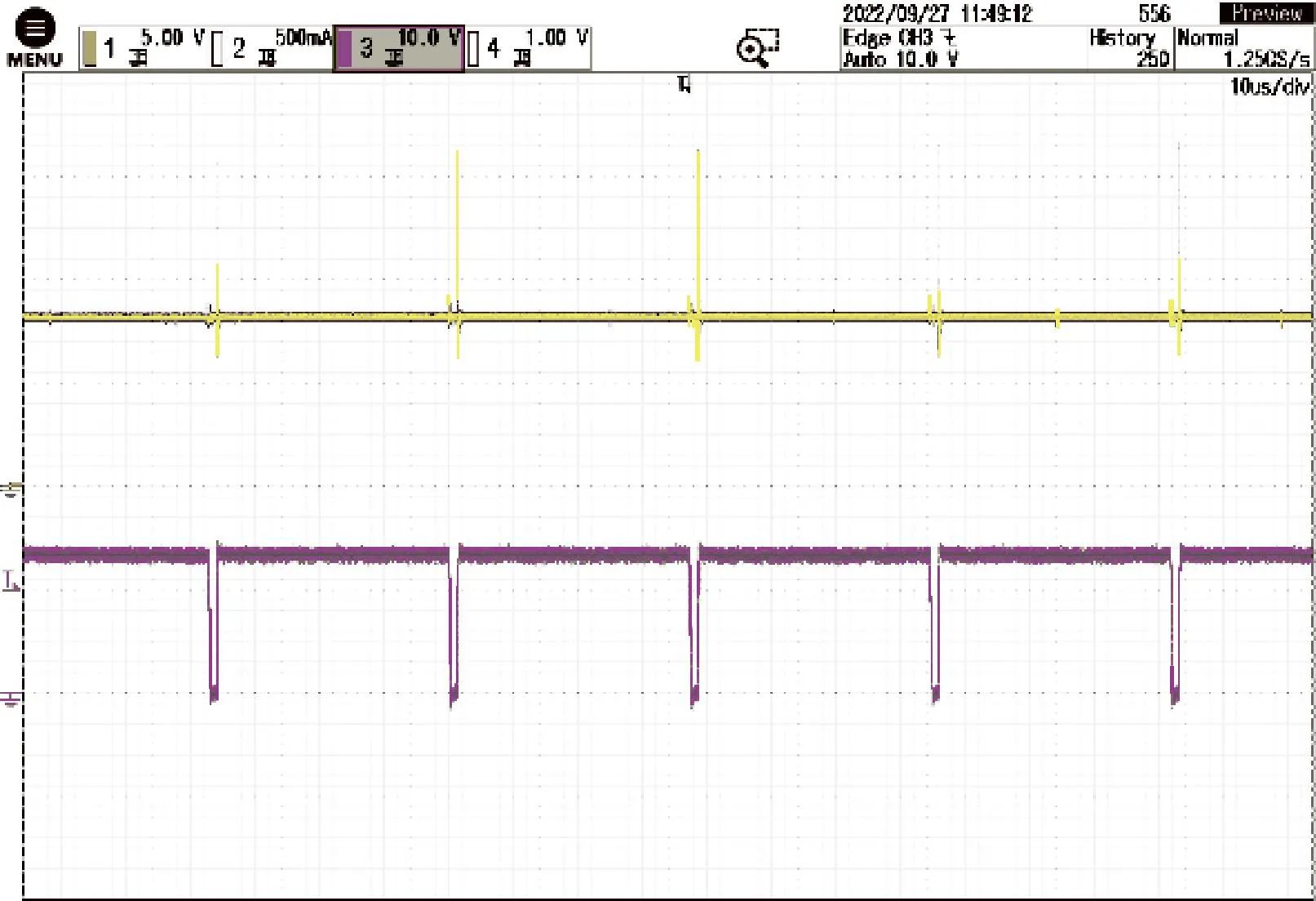
圖13 PWM單極互補(bǔ)模式95%占空比信號(hào)和自舉電容電壓
(3)雙極模式(PWM雙極互補(bǔ))測(cè)試波形
圖14為雙極模式下的占空比信號(hào)和電機(jī)電樞電流波形。占空比信號(hào)模擬電機(jī)起動(dòng)與低速的工作狀態(tài),為55%的正向和45%反向。顯然,電流波形波動(dòng)較大,該模式下,由于空心杯電機(jī)電樞電感較小的特殊電氣特性,使得控制過(guò)程中電樞電流的增降幅度較大,且快速交變,這樣會(huì)導(dǎo)致電機(jī)轉(zhuǎn)矩脈動(dòng)大且穩(wěn)定性較差,起動(dòng)與低速噪聲大,因此該控制方式并不適用于空心杯電機(jī)的H橋驅(qū)動(dòng)控制。

圖14 PWM雙極互補(bǔ)模式占空比信號(hào)和電樞電流
5 結(jié) 語(yǔ)
本文介紹了H橋常用的三種控制方式,結(jié)合空心杯電機(jī)特殊的電氣性能,對(duì)三種控制方式下空心杯電機(jī)的低速控制過(guò)程進(jìn)行分析,設(shè)計(jì)全國(guó)產(chǎn)化的硬件平臺(tái)的空心杯電機(jī)驅(qū)動(dòng)器,并通過(guò)實(shí)驗(yàn)對(duì)比三種不同模式下H橋驅(qū)動(dòng)空心杯電機(jī)的驅(qū)動(dòng)效果,經(jīng)過(guò)對(duì)比分析,確定單邊PWM調(diào)試方式是最適用于的空心杯電機(jī)控制的驅(qū)動(dòng)方式。
