基于快速局部對比度和目標特征的星圖弱小目標檢測算法
2024-01-31 06:13:34牛海鵬顏昌翔王一霖管海軍王超邵建兵
液晶與顯示 2024年1期
牛海鵬, 顏昌翔, 王一霖, 管海軍,3, 王超,3, 邵建兵*
(1.中國科學院 長春光學精密機械與物理研究所, 吉林 長春 130033;2.中國科學院大學, 北京 100049;3.長春長光智歐科技有限公司, 吉林 長春 130033)
1 引言
隨著航天技術的發展,空間中出現越來越多的在軌航天器及空間碎片,對空間環境造成嚴重威脅。空間監視可探測到對航天系統構成威脅的目標,確定目標尺寸、形狀、軌道參數等重要目標特性,從而指導航天系統進行規避[1]。天基探測具有在軌運行不受氣象影響、機動靈活、全天候工作等優點,逐漸成為當今研究熱點[2]。天基相機視場大、觀測距離遠,獲取的圖像目標數量眾多。弱小目標與恒星相比,呈現出低信噪比、低亮度和小尺寸的特點,在成像系統上所占像素點較少。一方面,受空間雜散光和空間輻射影響,星圖背景復雜,弱小目標極容易淹沒在復雜背景中;另一方面,由于大量成像系統噪聲和背景噪聲的存在,在檢測過程中會造成虛警現象。
為了解決這些問題,研究人員提出了許多方法。通常利用局部信息進行小目標檢測,常用的局部信息目標檢測方法有背景估計法、形態學方法和局部對比度法等[3]。背景估計法通過計算圖像的背景信息,將得到的背景信息從圖像中分離后獲取目標。楊衛平等提出的中值濾波差分法[4]通過設計濾波窗口,窗口遍歷圖像時將中心點像素灰度值用窗口內像素灰度均值代替獲得背景圖,將原始圖像與背景圖差分后獲得目標。Deshpande[5]等人提出的最大中值法(Max-median)在濾波窗口內劃分了多個方向,使算法更好地適應背景邊緣的變化。楊杰[6]等人提出的二維最小均方差(Two Dimensional Least Mean Square,TDLMS)法可實現自適應背景估計,使算法在檢測精度上有了進一步的提升。形態學方法是一種非線性濾波方法,通過設計與目標相適應的結構窗口,利用窗口遍歷圖像,對窗口內采取腐蝕和膨脹等操作達到抑制背景識別目標的效果。白相志[7]等人改進了傳統形態學Top-hat的結構窗口,將結構窗口設計為中心和周圍區域,使算法能夠更好地捕捉目標和背景,更適用于小目標的檢測。丁鵬[8]等人提出了一種結合形態學和Canny算法的紅外弱小目標檢測算法,將Top-hat法去除背景干擾能力和Canny法檢測邊緣能力進行結合,取得了良好的目標檢測效果。徐澤明[9]采用兩個大小不同的結構窗口,使算法在去除星圖背景時避免了目標丟失。近年來,基于人類視覺系統(Human Visual System, HVS)[10]的目標檢測算法被許多相關學者提出。局部對比度方法通過設計對比度計算窗口,計算窗口內中心區域與周圍區域的對比度,利用目標與背景區域的對比度差異實現目標的檢測。Chen[10]等提出的局部對比度方法LCM(Local Contrast Measure)通過設計兩層對比度窗口對低對比度的背景區域進行抑制,完成對目標的檢測。此后,許多學者分別在LCM方法的基礎上進行了改進。在對比度的計算上,韓金輝等提出的ILCM (Improved LCM)算法[11]以及相對局部對比度(Relative LCM,RLCM)算法[12]都結合了對比度差值計算的思想,使算法達到了同時增強目標和抑制背景的效果。段思韋等提出的SWLCM(Spatial Weight Local Contrast Measure)算法[13]和韓金輝等提出的WSLCM(Weighted Strengthened Local Contrast Measure)算法[14]都在對比度計算時對窗口內不同位置的子窗口進行加權,使算法可以更好地適應圖像背景邊緣的變化。在對比度窗口的設計上,潘勝達等提出的DLCM(Double-layer Local Contrast Measure)算法[15]和韓金輝等提出的3層窗口的比差聯合對比度算法[16]都使用單尺度對比度計算窗口,解決了不同尺度小目標的檢測問題,使算法在檢測目標尺寸未知時魯棒性更強。
然而,在以上目標檢測方法中,背景估計法和形態學方法的檢測效果非常依賴算法窗口設計,星圖中目標尺寸變化范圍較大,采用單尺度窗口無法適應目標,采用多尺度窗口又會導致算法耗時大幅增加。同時,背景估計法和形態學方法在目標分割時均采用灰度閾值分割,受高亮度背景和恒星的影響,閾值設定得過高或過低會出現弱小目標漏檢或噪聲殘留問題。局部對比度方法可通過設計單尺度窗口解決多尺度目標的檢測問題,具有一定的優越性。但是,目前的局部對比度方法大多將研究重點放在對比度窗口的設計和對比度的構造上,對對比度計算前和對比度計算后的重視不足,導致算法耗時長或噪聲去除效果不佳。
本文根據以上研究方法的不足,提出了一種基于快速局部對比度和目標特征的目標檢測方法,通過在傳統對比度方法的對比度計算前和對比度計算后的改進,提高了算法實時性、解決了噪聲去除難題。在對比度計算前,使用中值濾波去除部分高頻噪聲,使用快速局部極大值濾波確定目標候選區域,使后續的對比度計算只在目標候選區域進行,節省計算時間;在對比度計算中,采用3層對比度計算窗口進行背景抑制,突出目標成像特征;在對比度計算后,根據目標成像特征,建立目標能量分布特征、目標能量集中特征和目標能量傳遞特征函數,設定特征閾值,進一步去除噪聲,提取真實目標。
2 局部對比度算法
文獻[16]算法是近年來提出的目標檢測算法,由于算法中采用3層結構窗口,可以通過單尺度窗口解決多尺度目標檢測問題,并且算法中構造的比差聯合對比度可以很好地適應邊緣背景變化,是本文算法的基礎之一。
該算法設計的窗口如圖1所示,共包含5×5個子窗口,每個子窗口大小為3×3,中心層窗口T用于計算目標信息,中心層T周圍的8個子窗口IB1~IB8為中間層,用于隔離目標與背景,最外層16個子窗口OB1~OB16用于計算背景信息。
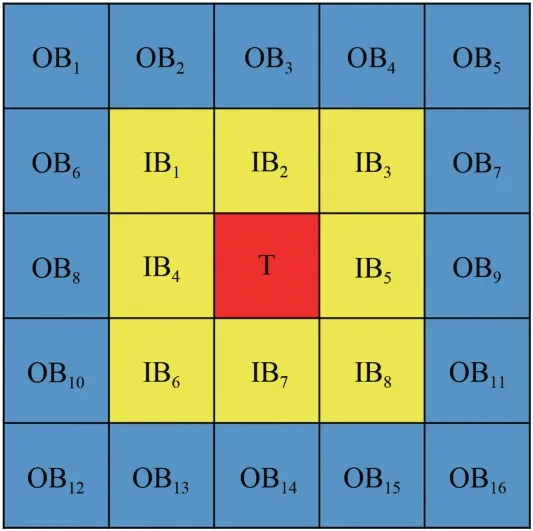
圖1 3層對比度計算窗口Fig.1 Three-layer contrast calculation window
為了避免當目標靠近背景邊緣時,高亮度背景對目標對比度計算結果的影響,在最外層子窗口中選擇與中心層灰度最接近的窗口作為背景值,背景的計算過程如式(1)所示:
其中:(i,j)表示當前像素點的坐標,Imf表示中心層的灰度均值,mOBn表示第n個(共16個)最外層窗口的均值,B表示最終得到的背景值。
接著,構造了比差聯合對比度,如式(2)所示,通過計算中心層與背景層的對比度差異,實現對背景的抑制和目標的增強,式中ξ是為了避免分母為0的情況出現,取值為10。
考慮到目標一般比周圍鄰域背景亮,本文引入了非負約束,最終對比度計算公式為:
使用該窗口遍歷圖像所有像素點,計算對比度結果,認為真實目標最為突出,通過設置自適應對比度閾值提取真實目標。
3 本文算法
從文獻[16]所提算法的計算過程可以看出,該算法在用于星圖空間目標檢測中存在以下問題:
(1)該算法構造的多層比差聯合對比度窗口計算復雜,由于星圖尺寸較大,若整幅圖像遍歷計算,很難滿足算法的實時性要求。
(2)該算法在目標分割時采用自適應對比度閾值,星圖中復雜背景噪聲與弱小目標具有相似性,對比度閾值無法有效區分目標和噪聲,會使圖像中出現大量虛警。并且星圖中存在大量恒星和多個空間目標,采用自適應閾值時,高對比度響應的恒星和空間目標會使閾值偏高,造成低對比度響應目標漏檢的情況。
針對上述問題,本文提出了一種基于快速局部對比度和目標特征的目標檢測算法,該算法利用目標的顯著性和成像特征實現背景抑制和噪聲去除,具有較高的檢測率和較低的時間消耗,算法流程圖如圖2所示。首先,在對比度計算前,采用中值濾波去除部分噪聲,采用快速極大值濾波篩選目標候選區域,確保后續對比度計算只在目標候選區域進行,提升算法計算速度;接著,在對比度計算中,設計了3層對比度窗口,對復雜背景進行抑制,突出目標的成像特征;最后,建立歸一化目標成像特征函數,通過目標能量分布、目標能量集中和目標能量傳遞3個特征閾值去除噪聲,提取真實目標。
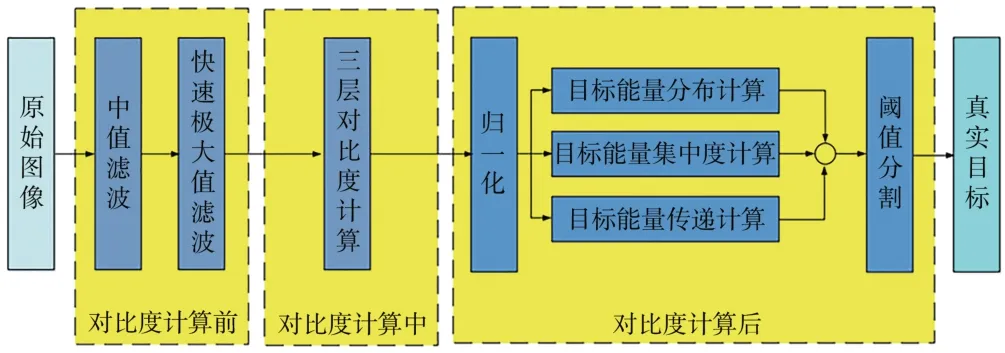
圖2 本文算法流程圖Fig.2 Algorithm flow chart of this paper
3.1 對比度計算前
本文采用了文獻[16]所提算法中構造的比差聯合對比度。由于星圖尺寸較大,且大部分為灰度變化緩慢的背景區域,采用對比度遍歷計算嚴重浪費時間。人類視覺系統在處理較大范圍信息時具有快速分析能力,可快速提取部分有用信息以避免對信息的全局處理[17]。因此,本文通過在對比度計算前對圖像使用中值濾波和快速局部極大值濾波,去除部分噪聲和平滑背景區域,完成對有用信息的提取即獲得目標候選區域,使得后續的對比度計算可以只在目標候選區域進行,減少算法的存儲量和運算量,節省時間。
3.1.1 中值濾波
為了減少噪聲對目標檢測產生的干擾,本文采用中值濾波的方法對圖像進行平滑處理,中值濾波公式如式(4)所示:
其中:src(x,y)為原始圖像,fm(x,y)為濾波后的圖像,Dmed為中值濾波區域,本文設置的濾波窗口大小為3×3。
3.1.2 快速局部最大值濾波
通常目標中心能量為局部最大值,因此,使用滑動窗口遍歷圖像,當窗口中心像素點的灰度值為窗口內灰度最大值時,則可認為該區域為目標候選區域。局部最大值濾波確定目標候選區域fp(x,y)的計算公式如式(5)、式(6)所示:
其中:fp(x,y)表示以像素點(x,y)為中心的窗口區域;Dm表示窗口大小,Dm的大小取決于兩個目標間的最小距離,為了避免過多的虛警,同時保持較高的靈敏度,Dm設置為5×5;Fmax(x,y)表示目標區域內灰度最大值;Fmin(x,y)表示目標區域內灰度最小值;閾值th的值取0,目的是排除灰度變化為0的區域。
3.2 對比度計算中
由于已經確定了目標候選區域,無需對圖像使用遍歷對比度計算,另外為了適應星圖中更多尺寸的目標,對文獻[16]的對比度計算窗口進行了改進,設計了可定位目標候選區域中心的3層對比度計算窗口。
本文的對比度計算窗口如圖3所示。該窗口共包含7×7個子窗口,每個子窗口大小為3×3,紅色中心層窗口中的小窗口T用于定位目標區域中心即灰度最大值處,中心層周圍的24個黃色子窗口IB1~IB24表示內層區域,用于計算目標信息,最外層24個藍色子窗口OB1~OB24用于計算背景信息。
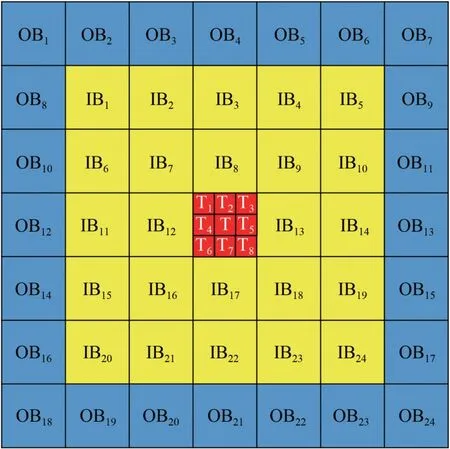
圖3 本文對比度計算窗口Fig.3 Contrast calculation window in this paper
對比度計算過程同章節2,最終目標候選區域F(x,y)的計算公式如式(7)所示:
3.3 對比度計算后
空間相機探測范圍廣,獲取的星圖尺寸較大,星圖中的大量恒星、目標和噪聲灰度差異較大,若在對比度計算后直接采用自適應對比度閾值分割的方法,高響應的恒星、目標和噪聲區域會導致分割閾值偏高,造成低響應的弱小目標丟失或大量噪聲殘留。因此,本文在對比度計算后,針對不同目標對比度響應不同的問題進行了歸一化處理,并提出了目標特征閾值分割的方法,根據目標成像特征差異去除噪聲。
3.3.1 歸一化
為了解決不同灰度、不同信噪比的目標對比度計算結果響應不同的問題,本文引入了歸一化思想,對目標區域F(x,y)進行歸一化得到Fnorm(x,y),并設置歸一化高斯核作為目標特征計算的比較標準。目標區域歸一化計算公式如式(8)、式(9)所示:
其中:Fsub(x,y)為原始圖像區域,(xi,yi)為圖像第i個候選目標區域中心坐標,k為目標候選區域大小,Fnorm(x,y)為歸一化后的候選目標區域。
高斯核歸一化計算公式如式(10)~(12)所示:
其中,x0、y0、δk決定了高斯核的大小。
3.3.2 目標成像特征閾值分割
由于星圖中噪聲隨機分布,而目標具有如下成像特征:
(1) 目標能量分布近似符合二維高斯分布;
(2) 目標能量大部分集中在目標中心及其周圍少部分的像素范圍內;
(3) 目標能量從中心向四周擴散,逐漸減小。
本文根據這3條特征分別建立目標能量分布特征函數、目標能量集中特征函數和目標能量傳遞特征函數,計算目標候選區域的特征符合程度,通過閾值將不滿足條件的噪聲區域進行去除,提取真實目標。
(1) 目標能量分布特征函數
目標能量分布近似符合二維高斯分布,該特征表示了目標的能量分布。本文采用模板匹配的思想,將高斯核作為匹配模板,將目標區域進行模板匹配,計算目標區域和模板的相似度ER,并用其表示目標的能量分布特征,其中相似度ER的計算公式如式(13)~(15)所示:
其中:ER(x,y)表示像素點(x,y)處的相似度,T'(x,y)和I'(x,y)表示目標信息和模板信息。
(2) 目標能量集中特征函數
目標能量大部分集中在目標中心及其周圍少部分的像素范圍內,該特征表示了目標的能量集中度,因此可以通過計算目標能量集中度描述這一特征。定義EC為目標能量集中度函數,EC的計算公式如式(16)、式(17)所示:
其中,S表示靠近目標中心的范圍。
(3) 目標能量傳遞特征函數
目標能量從中心向四周擴散且逐漸減小,該特征表示了目標的能量傳遞,而圖像梯度可以表示圖像的灰度變化,所以引入梯度表示目標的能量傳遞,一個點的梯度計算公式如式(18)~(21)所示:
其中:Gx為水平方向梯度,Gy為豎直方向的梯度,?(x,y)為梯度方向。定義ET為目標的能量傳遞特征函數,其公式如式(22)~(24)所示:
其中:?k(x,y)表示歸一化高斯核的梯度方向,?diff(x,y)表示目標區域與高斯核的梯度差異,N代表目標區域像素個數。
(4) 閾值設定
閾值的設定依據為目標的成像特征。考慮到實際星圖中目標很難達到理想成像的情況,所以設定了寬松的閾值范圍:TER=0.5~0.7,TEC=0.70~0.9,TET=0.4~0.6,即目標區域應滿足:(1) 50%~70%以上的像素點符合二維高斯分布;(2) 70%~90%的能量集中在中心區域;(3) 40%~60%以上的像素點具有正確的能量傳遞。
對于不同的星圖,可在星圖中加入特定信噪比的仿真目標,利用特征函數自動計算得出閾值區間,對本文給出的寬松閾值區間進行調整。
當目標候選區域同時滿足3個閾值條件時,即ER>TER、EC>TEC、ET>TET時,F(x,y)被判斷為真實目標。
4 實驗結果和分析
4.1 實驗數據
為了驗證本文算法的有效性,進行了真實星圖實驗驗證,所使用的數據為中國科學院大視場4.8°光學望遠鏡所拍攝的圖像數據,實驗平臺和星圖如圖4所示。
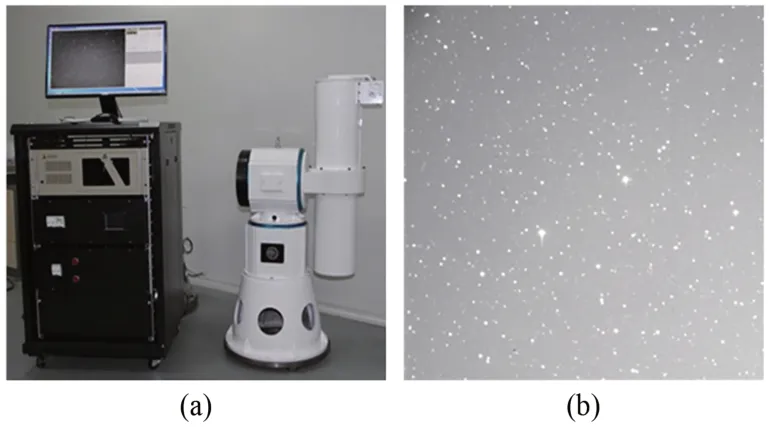
圖4 實驗平臺(a)和星圖(b)Fig.4 Experimental platform (a) and star map (b)
實驗中所用到圖像序列為不同天空區域拍攝的序列,包含210、70和20張圖像,從其中選取7個不同信噪比的典型目標,并取目標80×80像素區域組成新的圖像序列。所有實驗均在一臺2.70 GHz英特爾酷睿i7-12700H處理器、內存(RAM)為16 GB的個人電腦上運行,所使用的測試軟件為PyCharm Community Edition 2022.1.2。
4.2 評價指標
通常可用目標的信噪比SNR描述目標的顯著性,其計算公式為:
引入接受者操作性能(Receiver Operating Characteristic,ROC)曲線進一步展示算法的有效性。通過計算算法的檢測率(True Positive Rate,TPR)和虛警率(False Positive Rate,FPR),以虛警率為橫軸,檢測率為縱軸繪制ROC曲線。其中檢測率TPR和虛警率FPR的定義分別為:
當虛警率一定時,檢測率越高,說明算法的檢測效果越好;同理,當檢測率一定時,虛警率越低,說明算法的檢測效果越好。在ROC曲線中則表現為,曲線越靠左上,算法的性能越好。
4.3 算法效果驗證
將本文所提方法用于星圖實驗驗證,各閾值設定為:TER=0.55,TEC=0.8,TET=0.5。算法檢測結果如圖5所示,圖中空間目標由紅色矩形框標記,恒星由藍色圓形標記。
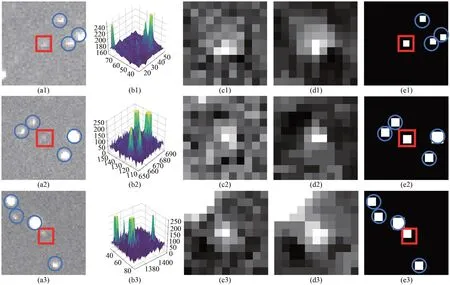
圖5 算法處理效果圖。(a) 原始圖像; (b) 目標區域灰度三維圖;(c) 原始目標灰度圖; (d) 中值濾波后;(e) 本文算法處理后。Fig.5 Effect of algorithm processing. (a) Original image; (b) Grayscale 3D image of the target area ;(c) Original target grayscale image; (d) Median filtered; (e) Processed by the proposed algorithm.
為了進一步驗證所提算法的有效性,將其與DLCM[15]、ILCM[11]、SWLCM[12]、RLCM[13]和文獻[16]方法共5種經典人類視覺系統目標檢測算法進行了對比。實驗使用圖5(a)中相同的3幅圖像,各算法的檢測結果如圖6所示,其中,空間目標由紅色矩形框標記,恒星由藍色圓形標記,其余未標記的白色部分為虛警。從檢測結果可以看出,本文所提方法能成功檢測所有目標,無虛警現象。其他對比方法可以檢測到處于一定信噪比的目標,受圖像中高亮度恒星和噪聲干擾,由于都采用自適應對比度閾值分割,出現了目標漏檢的情況,并且還將某些對比度計算結果較高噪聲區域識別為目標。
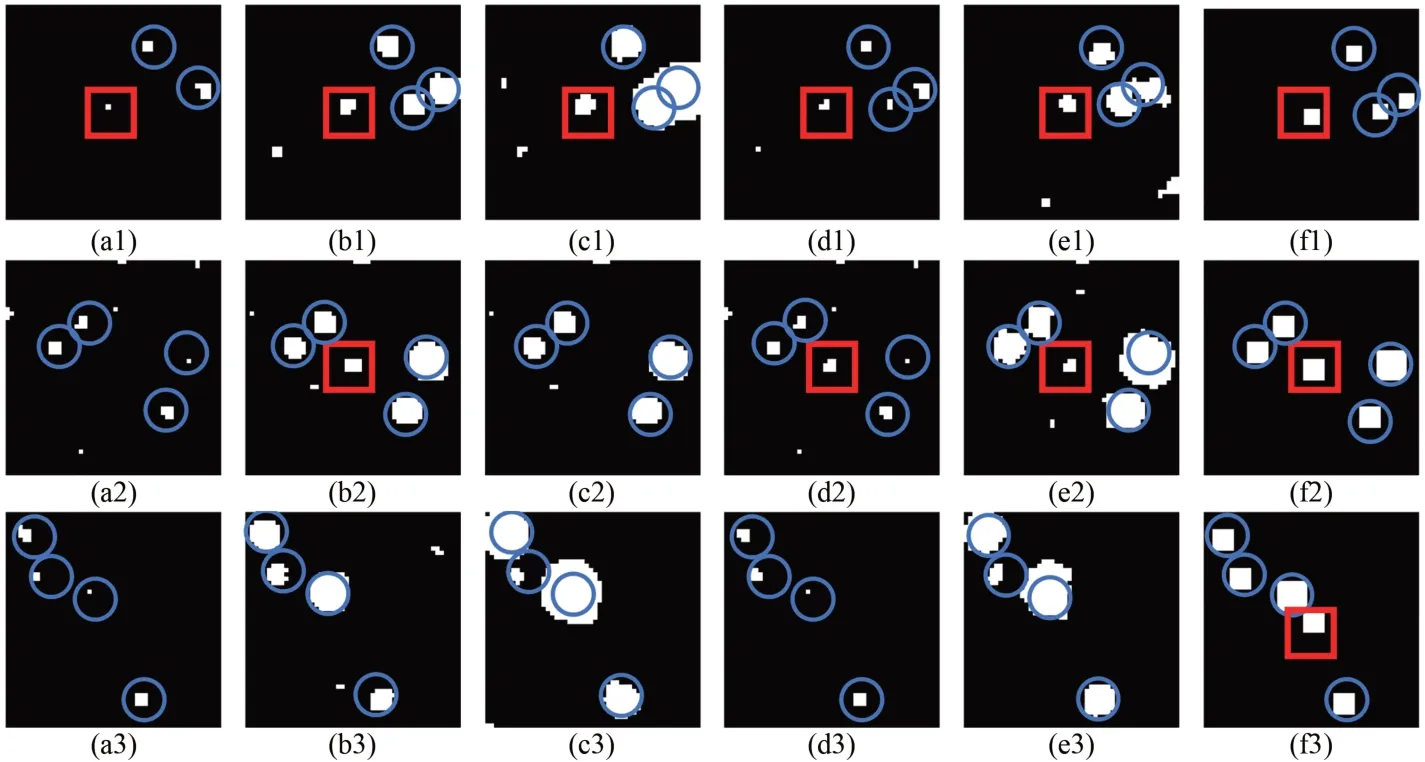
圖6 不同方法檢測結果。(a) Dlcm;(b) Ilcm;(c) Swlcm;(d) Rlcm;(e) 文獻[16]方法;(f) 本文算法。Fig.6 Detection results of different methods. (a) Dlcm;(b) Ilcm;(c) Swlcm;(d) Rlcm; (e) Method of literature[16];(f) Proposed.
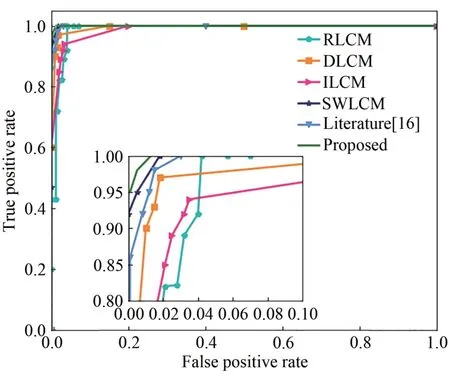
圖7 不同算法的平均ROC曲線比較Fig.7 Comparison of average ROC curves of different algorithms
各算法對不同圖像序列的檢測結果如表1所示。可以看出,在不同情況下,隨著目標信噪比的降低和目標周圍環境的變化,其他5種算法的檢測能力大幅下降。特別是當圖像中包含大量高亮度恒星和非均勻的雜散光時,其他5種算法都采用自適應全局閾值分割,閾值受高響應目標影響較大,導致目標檢測率下降較多。而本文算法采用了目標區域歸一化和目標特征閾值分割方式,對復雜背景和高亮度恒星具有魯棒性,所以具有較高的檢測率。
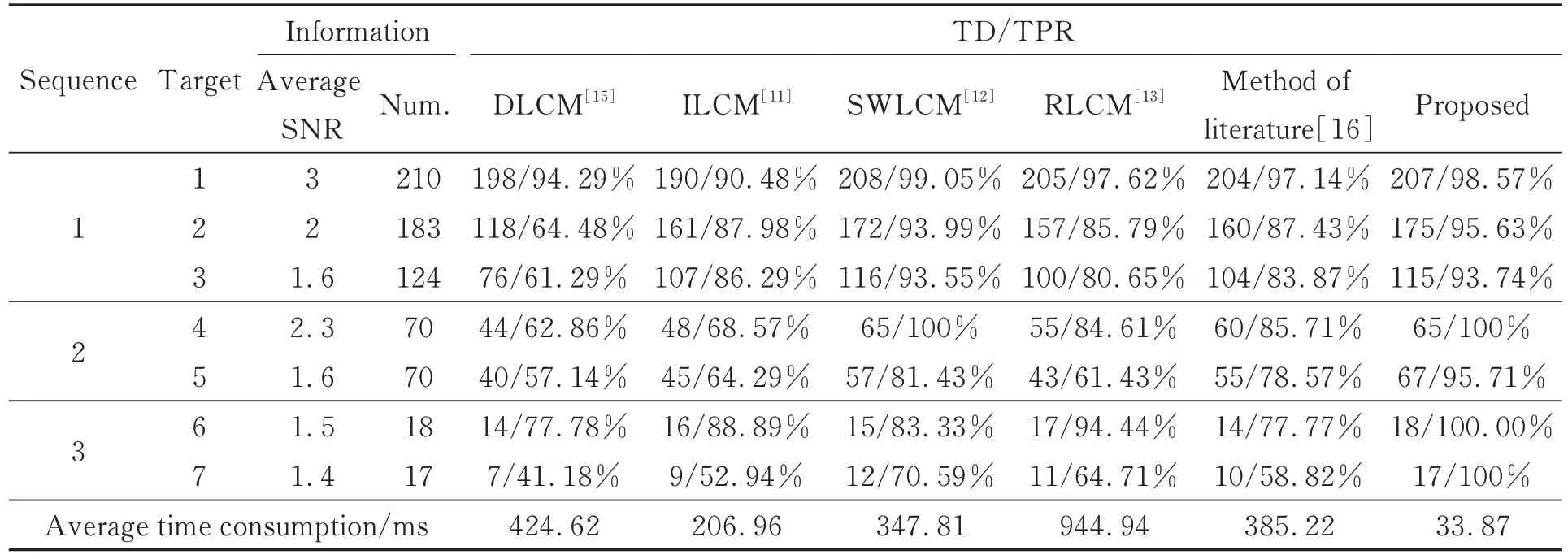
表1 不同算法的檢測結果比較Tab.1 Comparison of detection results of different algorithms
在算法時間消耗方面,局部對比度方法(DLCM[15]、ILCM[11]、SWLCM[12]、RLCM[13]和文獻[16]方法)通過設計復雜的對比度計算窗口提升了算法的性能,但復雜的對比度遍歷計算也大幅增加了算法運行時間。而本文方法在對比度計算前進行了目標候選區域的篩選,避免了后續對比度的遍歷計算,極大地節省了算法時間消耗,與其他幾種方法相比,具有明顯的優勢。
5 結論
本文提出了一種基于快速局部對比度和目標特征的目標檢測方法,算法分為對比度計算前、對比度計算中和對比度計算后3部分。在對比度計算前,采用中值濾波去除部分噪聲,采用快速極大值濾波篩選目標候選區域,提高算法實時性;在對比度計算中,采用3層對比度窗口,抑制復雜背景并突出目標成像特征;在對比度計算后,設置目標成像特征函數,通過特征閾值去除噪聲,提取真實目標。實驗結果表明,本文算法對于信噪比為1.5的目標有95%的檢測率,平均耗時僅為某些對比方法的1/30~1/6,相比于對比方法,在檢測率和時間消耗上具有一定的優越性。算法滿足星圖空間目標檢測算法魯棒性強、實時性高的要求,適用于星圖復雜背景下的快速目標檢測,具有一定的工程指導價值。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
當代陜西(2020年14期)2021-01-08 09:30:42
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52