基于人工智能技術的深松機械智能化控制研究
2024-02-03 03:06:02張亞超李素敏
農機使用與維修 2024年1期
張亞超,徐 洋,李素敏
(許昌電氣職業學院,河南 許昌 461000)
0 引言
我國作為農業大國,國土面積位居世界第三,但我國也是一個人均耕地位于較低水平的國家之一。隨著現代化城市的建設,耕地面積不斷被城市用地占用,為保證土壤質量,國家出臺一系列耕地保護政策,提高耕地質量。深松機作為保護性耕作的主要整地機械之一,如圖1所示,在農業生產領域使用廣泛。深松機特殊的深松鏟能夠在保證原有土壤結構較為完整的基礎上,作業過程能夠有效破壞堅實的犁底層,使土壤變得松散,增加土壤儲水保墑能力[1]。
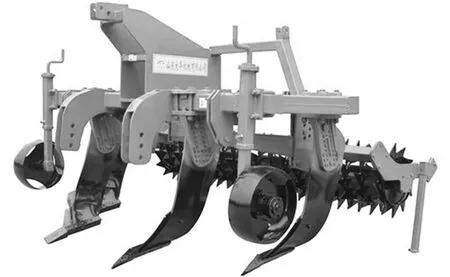
圖1 深松機
深松機保證作業耕深是衡量深松作業好壞的重要指標。但是由于一些地區土質或地表前茬作物殘留的緣故,導致傳統的深松機深淺不一,作業深度過淺,達不到犁底層深度影響作物生長,不符合農藝要求;作業深度過深,牽引動力增加,油耗提高導致成本上升[2-5]。現階段,測量作業深度分為自動測量和人工測量兩種。自動測量可分為直接和間接,目前多數采用超聲波原理測量作業機具與原地面標定平面高度差計算深度的控制系統屬于直接測量;采用傾角傳感器借助數學幾何關系,計算地面與當前作業機具的位置狀態的角度關系,進而計算作業深度的方法屬于間接測量。
隨著電子信息技術的發展,國內學者逐漸開展了對作業深度自動化測量的研究。丁瑞華[6]利用測量作業機具上設計的測力臂與地面的角度建立數學模型計算作業深度。但此類方法對于地面平整度精度不高的地塊誤差較大。蔣哮虎等[7]為測量地面平整度不高地塊的作業耕深,利用超聲波和紅外傳感器結合的方式,測量準確度得到一定程度上的保證。杜新武及其團隊[8]為解決旋耕機作業過程中的旋刀組形變和車輪位置變化引起結果的影響,利用傾角傳感器并且建立機具下拉桿與機具平臺平面之間的角度數學模型關系間接計算作業深度。
本文在前人研究成果基礎上,在深松機上安裝傾角傳感器以及輔助監測系統,對深松過程中的傾角變化量進行動態監測,根據深松機傾角變化量計算深松機入土深度,利用智能控制技術調節深松機的入土深度,達到精準深松作業控制的目的,從而提高深松作業質量,降低深松機的動力消耗。
1 系統組成設計
本文所述深松機作業系統主要包括拖拉機、車載控制器、升降裝置、深松鏟、智能化控制系統。根據深松機械智能化控制系統的功能需求,將傳感器技術、物聯網技術和無線傳輸技術相結合,確定智能深松機械控制系統的設計與各部分主要作用。監控系統主要包括傳感器、車載終端、服務器、監控終端四個部分。深松機械智能化控制系統的主要組成如圖2所示。
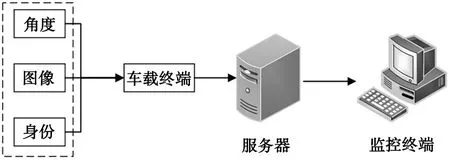
圖2 系統整體結構
深松機械智能化控制系統主要由農具識別、作業角度采集、農具圖像監測、農具作業控制、歷史數據查詢、報警6個功能模塊組成,系統組成框圖如圖3所示。

圖3 系統功能組成框圖
本文在拖拉機以及深松鏟各安裝了一傾角傳感器,兩傾角傳感器之間的數據差值即為深松鏟的入土角度,通過運算處理可得到深松鏟的實際入土深度,如深松鏟實際入土深度偏離理想深松土壤深度范圍,車載終端將驅動升降裝置完成深松機作業系統入土深度精確控制,并產生報警信號發送至監控終端;車載終端還可將監測到的深松鏟作業深度信息存儲到服務器內,供操作人員查詢歷史數據。
農業機械識別系統主要實現了對各種農機具的識別,并對各種農機具的工作角度信息進行了存儲。不同農機具在收到車載終端命令后,會根據自己的ID數據類型向服務器發送數據。作業角度采集功能是對犁具下放以及提升的角度信息進行采集并儲存到數據庫中。
農具圖像監測功能能夠實現利用車載終端接收服務器查看作業現場圖像命令后,將當前農機具的圖像等信息參數實時發送給服務器,或無需指令,車載終端保持一定時間間隔采集當前農機具作業情況圖像參數發送至服務器。農具作業控制功能是通過農具安裝的傳感器進行作業數據采集,深松機械控制系統進行數據處理分析,并生成控制指令,由車載終端控制執行機構進行深松作業狀態調整,或按照控制指令進行系統報警與狀態顯示。
2 深松機傾角監測原理
當拖拉機角度傳感器讀數為0時,深松機角度傳感器讀數實際反映深松鏟入土角度。當機組在坡面上作業行進時,安裝于拖拉機上的角度傳感器讀數為坡面角度,深松機上角度傳感器讀數與拖拉機上角度傳感器讀數的差值為深松鏟入土角度。
綜合考慮地面角度波動和深松目標深度,對深松機傾角進行修正,得出深松機傾角目標角度控制模型[9],即式(1)。

(1)
式中θ—深松機上角度傳感器讀數,(°);
θ1——深松機傾角目標角度,(°);
β—拖拉機上的角度傳感器讀數,(°);
Δβ—作業過程拖拉機角度變化量,(°);
h0—深松機與拖拉機連接點到深松鏟尖點的垂直高度,mm;
a—深松機與拖拉機連接點到深松鏟尖點的水平距離,mm。
3 深松機智能控制系統設計
深松機精準控制時,通過前端傳感器進行數據采集,車載終端進行數據處理分析,并生成控制指令,由后端執行機構進行深松作業狀態調整,或按照控制指令進行系統報警與狀態顯示。深松機控制系統采用高性能STM32F103ZET6作為車載終端核心處理芯片,選用傾角傳感器要求采集精度不低于±0.3°,且能夠同時進行多通道數據處理,傳感器與車載終端之間通過標準通訊方式進行數據交互。執行機構電氣控制系統接收車載終端生成的控制指令,驅動執行機構進行深松作業。本文深松機構電氣控制系統采用STM32單片機進行系統設計,以車載終端內部單片機所發送的控制指令作為輸入信號,以深松機構的作業狀態作為輸出。圖4為深松機智能控制系統的主要控制流程圖。
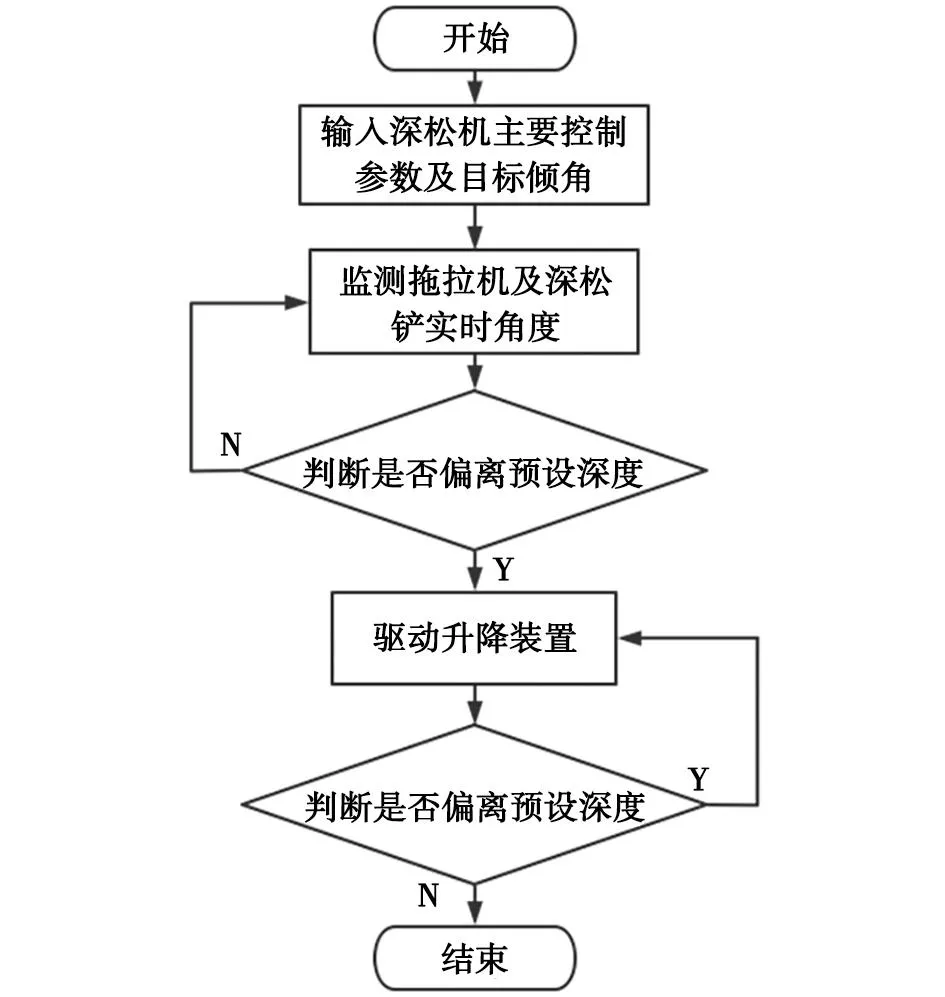
圖4 系統控制流程圖
4 結論
隨著我國城鎮化建設的發展和農業勞動力的轉移,農業機械的應用數量會越來越多,國家對農業機械的補貼投入越來越大,因而,應通過現代化的技術手段加強對農業機械作業質量的管理。深松機械智能化控制系統,有效改變了無法真實掌握農田深松機械的實際情況的狀況,加強了對作業機手的管理,提高了土地深松質量,避免了與機手因面積和質量產生糾紛,有效地使國家補貼政策真正的保質保量的惠及到每個參與深松作業的農機手,效果良好。通過本技術的應用,使我們初步看到了科技創新與農業機械相結合的廣泛應用前景,對農業機械智能化控制研究了提供參考。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
故事大王(2016年7期)2016-09-22 17:30:08
新聞傳播(2015年10期)2015-07-18 11:05:40