基于UWB定位技術(shù)的作業(yè)風(fēng)險(xiǎn)管控智能終端設(shè)備研究
2024-02-21 09:41:42曾紀(jì)鈞沈桂泉張金波
電測(cè)與儀表 2024年2期
關(guān)鍵詞:智能
曾紀(jì)鈞,沈桂泉,張金波
(廣東電網(wǎng)有限責(zé)任公司,廣州 510600)
0 引 言
電網(wǎng)在發(fā)展的過(guò)程中,設(shè)備越來(lái)越多,危險(xiǎn)點(diǎn)的區(qū)域也相應(yīng)地增多,給現(xiàn)場(chǎng)檢修人員的安全帶來(lái)了隱患,在工作中不加小心,就容易引起人身事故和電網(wǎng)設(shè)備的損壞[1]。為了防止現(xiàn)場(chǎng)維護(hù)人員誤入危險(xiǎn)點(diǎn),需要實(shí)時(shí)掌握維護(hù)人員的位置并在靠近危險(xiǎn)點(diǎn)時(shí)自動(dòng)發(fā)出告警。然而在室內(nèi)環(huán)境中,GPS信號(hào)的強(qiáng)度很弱,不能夠精準(zhǔn)定位現(xiàn)場(chǎng)運(yùn)行人員的位置,因此,室內(nèi)定位作業(yè)風(fēng)險(xiǎn)管控智能終端的研究有重要意義。
現(xiàn)階段公司現(xiàn)場(chǎng)作業(yè)風(fēng)險(xiǎn)基本由現(xiàn)場(chǎng)人員經(jīng)驗(yàn)發(fā)現(xiàn),缺乏相關(guān)的信息化工具進(jìn)行輔助。人工識(shí)別的作業(yè)風(fēng)險(xiǎn)點(diǎn)往往存在風(fēng)險(xiǎn)點(diǎn)、風(fēng)險(xiǎn)等級(jí)識(shí)別不準(zhǔn)確,風(fēng)險(xiǎn)點(diǎn)缺失,預(yù)防措施錯(cuò)漏等問(wèn)題,給現(xiàn)場(chǎng)安全管理帶來(lái)隱患。而定位技術(shù)的發(fā)展和應(yīng)用為解決上述問(wèn)題提供了方向。通過(guò)對(duì)比,UWB定位技術(shù)相較于其他定位技術(shù)具有抗干擾性強(qiáng)、穩(wěn)定性高、響應(yīng)速度快以及定位精度高的優(yōu)點(diǎn)。在室內(nèi)定位中應(yīng)用較多。現(xiàn)在已有研究人員進(jìn)行了相關(guān)研究,文獻(xiàn)[2]針對(duì)環(huán)境中引起的定位誤差,提出了測(cè)距誤差估計(jì)和補(bǔ)償?shù)乃惴?文獻(xiàn)[3]以最小成本和最大精度為優(yōu)化目標(biāo),對(duì)UWB空間基站安裝位置進(jìn)行了優(yōu)化部署;文獻(xiàn)[4]為解決在非視距傳輸環(huán)境下精確地低的問(wèn)題,在UWB算法中引入神經(jīng)算法。以上研究主要從算法方面改進(jìn),沒(méi)有從設(shè)備實(shí)際應(yīng)用進(jìn)行設(shè)計(jì)。因此,文中通過(guò)智能穿戴設(shè)備的應(yīng)用,輔助現(xiàn)場(chǎng)人員在提前發(fā)現(xiàn)風(fēng)險(xiǎn)、作業(yè)中有效規(guī)避風(fēng)險(xiǎn),同時(shí)能夠與安全生產(chǎn)子系統(tǒng)進(jìn)行數(shù)據(jù)對(duì)接,減少現(xiàn)場(chǎng)錄入工作量,提升工作效率同時(shí)有助于提升現(xiàn)場(chǎng)風(fēng)險(xiǎn)管理水平[5]。
文中重點(diǎn)研究業(yè)風(fēng)險(xiǎn)管控智能終端設(shè)備的設(shè)計(jì),包括智能頭盔和室內(nèi)定位系統(tǒng)。首先,比較了不同定位技術(shù)的優(yōu)缺點(diǎn),介紹UWB室內(nèi)定位技術(shù)原理。設(shè)計(jì)了智能頭盔,給出了設(shè)計(jì)參數(shù)和應(yīng)用功能;進(jìn)一步設(shè)計(jì)了室內(nèi)定位系統(tǒng)配合智能頭盔的使用。對(duì)UWB室內(nèi)定位技術(shù)方案進(jìn)行研究測(cè)試,包含定位模塊集成、室內(nèi)地圖測(cè)繪、基站部署和電子圍欄。
1 定位技術(shù)選擇
為了提高現(xiàn)場(chǎng)作業(yè)人員的安全性,防止誤入帶電間隔,需要精準(zhǔn)掌握現(xiàn)場(chǎng)人員的實(shí)時(shí)位置。目前應(yīng)用比較普遍的定位技術(shù)有WIFI、RFID、藍(lán)牙、UWB等技術(shù),以下是這幾種技術(shù)的選型分析。
(1)WIFI定位技術(shù)
WIFI定位[6-7]需要的硬件設(shè)備為無(wú)線(xiàn)傳輸?shù)幕?需要確定位置的設(shè)備發(fā)出信號(hào),而無(wú)線(xiàn)基站通過(guò)接收到的信號(hào)并結(jié)合自身的網(wǎng)絡(luò)結(jié)構(gòu),綜合確定待定位 WIFI 設(shè)備的坐標(biāo)。WIFI 定位技術(shù)目前相對(duì)來(lái)說(shuō)設(shè)備比較成熟,可以在現(xiàn)有設(shè)備的基礎(chǔ)上實(shí)現(xiàn),但由于 WIFI 的安全性較差,功耗較高,能夠利用的頻譜段也越來(lái)越少,因此,一般現(xiàn)在變電站、電廠等區(qū)域內(nèi)不再使用。
(2)RFID定位
RFID,即射頻識(shí)別技術(shù)[8-9],利用無(wú)線(xiàn)在比較短的距離內(nèi)發(fā)現(xiàn)標(biāo)簽,距離的范圍相對(duì)較廣,幾厘米 延長(zhǎng)到十幾米的距離。RFID[10]目前應(yīng)用的領(lǐng)域還是主要以公司系統(tǒng)中人員的考勤為主。為了確定人員是否位于某個(gè)區(qū)域內(nèi),對(duì)于位置的傳輸定位不能做到實(shí)時(shí)的傳輸。目前應(yīng)用也沒(méi)有統(tǒng)一的規(guī)范標(biāo)準(zhǔn),想要應(yīng)用于變電站等環(huán)境復(fù)雜的地域,難度系數(shù)較大。
(3)藍(lán)牙定位
藍(lán)牙定位[11-12]基于RSSI(信號(hào)強(qiáng)度)值,通過(guò)三角定位原理進(jìn)行定位。藍(lán)牙定位的缺點(diǎn)是收環(huán)境因素的影響很大,因?yàn)樗{(lán)牙信號(hào)的頻率很高,穿透能力很差。得到的RSSI 值存在著很大的誤差,為了使測(cè)得的結(jié)果盡可能的準(zhǔn)確,就只能通過(guò)算法來(lái)實(shí)現(xiàn),但算法的使用,增加了CPU的負(fù)擔(dān),從而使定位容易產(chǎn)生延時(shí)。另外變電站等場(chǎng)地較大,想要實(shí)現(xiàn)信號(hào)的全覆蓋,需要布置較多的基站從而增加投資成本。
(4)UWB定位
UWB(Ultra Wideband),即超寬帶定位,利用時(shí)間周期很短的非正弦波進(jìn)行數(shù)據(jù)的傳遞,作為一種無(wú)載的傳輸技術(shù)而被人們使用。UWB[13-14]調(diào)制同樣采用納秒級(jí)別的相當(dāng)窄的脈沖性質(zhì)的信號(hào),包含的范圍相對(duì)較廣,可以實(shí)現(xiàn)從直流到達(dá)交流的程度,生成的脈沖則通過(guò)天線(xiàn)向外發(fā)射。UWB具有輻射性相對(duì)較低從而不影響其他電子通信設(shè)備、響應(yīng)速度快、抵御其他信號(hào)擾動(dòng)能力強(qiáng)的優(yōu)點(diǎn)。
不同定位技術(shù)的比較在表1中給出,從抗干擾性、穩(wěn)定性、響應(yīng)速度以及定位精度綜合考慮之后,決定采用UWB室內(nèi)定位技術(shù)。
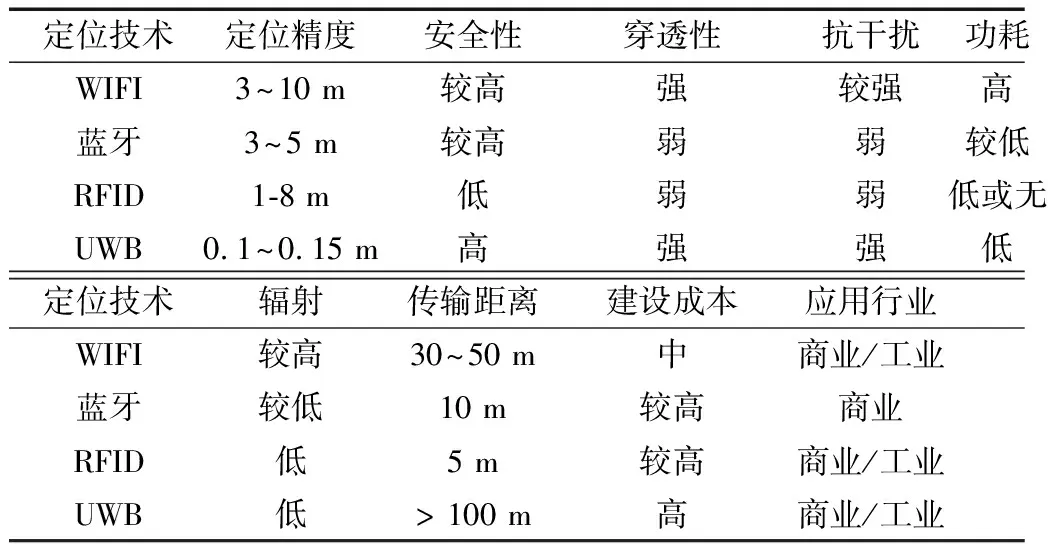
表1 多種定位技術(shù)的性能比較
2 UWB定位技術(shù)理論
UWB[15-16]測(cè)距使用的為飛行時(shí)間技術(shù)(Time of Flight, TOF),為了測(cè)得現(xiàn)場(chǎng)工作人員的位置,需要至少三個(gè)錨點(diǎn)(空間基站)和一個(gè)安裝于智能頭盔上的標(biāo)簽。根據(jù)電磁波在錨點(diǎn)和智能頭盔之間的傳輸時(shí)間,得到傳輸距離,從而進(jìn)行定位。文中采用往 返飛行時(shí)間(Two Way-Time of Flight, TW-TOF),此種算法不受空間基站和智能頭盔上標(biāo)簽時(shí)間同步性的影響,只需測(cè)得電磁波在之間的時(shí)間差即可[17-18]。TW-TOF測(cè)量原理如圖1所示。
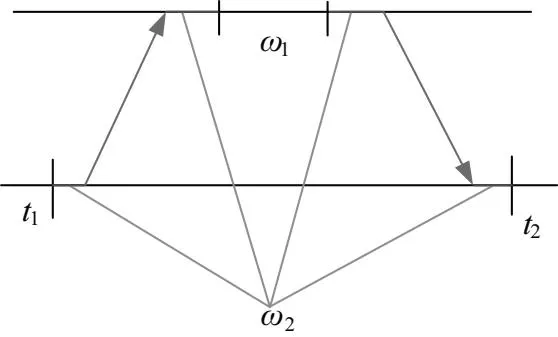
圖1 TW-TOF測(cè)量模型
根據(jù)TW-TOF測(cè)量原理,對(duì)頭戴智能頭盔的現(xiàn)場(chǎng)巡視人員的定位步驟如下:
(1)根據(jù)電磁波在空間基站到頭戴智能頭盔的現(xiàn)場(chǎng)巡視人員之間傳輸?shù)臅r(shí)間得到空間基站到運(yùn)維人員之間的距離,計(jì)算公式如式(1)[19]所示:
(1)
(2)在室內(nèi)環(huán)境中,不可避免的會(huì)出現(xiàn)遮擋物,而遮擋物對(duì)電磁波的傳播有較大的影響,產(chǎn)生的誤差符合非高斯分布,考慮到誤差原因,頭戴智能頭盔的現(xiàn)場(chǎng)巡視人員與空間基站的距離[19]為:
Di=DTOF-DNLOS
(2)
(3)同樣的原理,可以得到頭戴智能頭盔的現(xiàn)場(chǎng)巡視人員到其他兩個(gè)空間基站的距離。空間基站的位置坐標(biāo)在裝設(shè)的時(shí)候已經(jīng)給定,以現(xiàn)場(chǎng)人員到各個(gè)基站之間的距離Di為半徑畫(huà)圓,三個(gè)圓的交點(diǎn)即為現(xiàn)場(chǎng)人員的位置,計(jì)算公式如下:
(3)
(4)
(5)
(6)
3 智能頭盔設(shè)計(jì)功能
3.1 智能頭盔設(shè)計(jì)
智能頭盔采用一體化設(shè)計(jì),具備定位功能。帶旋轉(zhuǎn)臂,支持上下90°調(diào)整攝像頭、照明燈。核心主板處理器ARM八核、2.0 GHz,安裝內(nèi)存(RAM)2 G/4 G,機(jī)身內(nèi)存16 G/32 G/64 G,支持T-Flash卡,可擴(kuò)展至128 G。電池容量5 400 mAh,默認(rèn)2 A充電,支持qc3.03.5 A快充,配備1個(gè)Type-c口,支持USB接口雙面插入,1個(gè)sim卡口和一個(gè)耳機(jī)插口。視頻編解碼支持4K@30fps、1080p60、H2.64、H2.65、VP8。工作環(huán)境為-20 ℃~60 ℃。智能頭盔結(jié)構(gòu)圖如圖2所示。
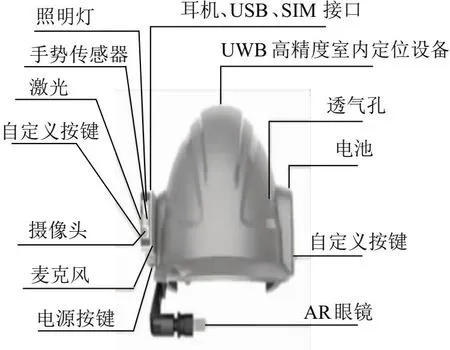
圖2 智能頭盔結(jié)構(gòu)圖
3.2 智能頭盔功能
智能頭盔主要功能為定位功能,同時(shí)集成視頻采集、AR眼鏡、多種功能模塊,包括拍照、錄像、照明、對(duì)講、實(shí)時(shí)視頻、GPS定位、軌跡記錄、人臉識(shí)別、行為分析等。并能夠使用智能手表、智能手機(jī)或者平板等智能終端通過(guò)藍(lán)牙對(duì)頭盔進(jìn)行操控。
(1)通信功能
通信功能包含語(yǔ)音對(duì)講、打電話(huà)、wifi、藍(lán)牙、2 G/3 G/4 G網(wǎng)絡(luò)、實(shí)時(shí)語(yǔ)音通信功能,數(shù)據(jù)通道主要包括采用2 G/3 G/4 G技術(shù)的APN專(zhuān)用通道、無(wú)線(xiàn)局域網(wǎng)等。
(2)實(shí)時(shí)監(jiān)控模塊[20]
管理者可以通過(guò)后臺(tái),實(shí)時(shí)查看前端作業(yè)現(xiàn)場(chǎng)的情況,并且可以對(duì)現(xiàn)場(chǎng)進(jìn)行可視化溝通、指導(dǎo)。實(shí)時(shí)掌握現(xiàn)場(chǎng)工作的最新進(jìn)展,便于第一時(shí)間發(fā)現(xiàn)現(xiàn)場(chǎng)的特殊問(wèn)題。
(3)AR功能
關(guān)聯(lián)設(shè)備臺(tái)賬信息,通過(guò)頭盔采集的設(shè)備銘牌、標(biāo)識(shí)牌信息進(jìn)行后臺(tái)算法分析,設(shè)備信息以文本方式顯示于AR眼鏡上,可以直觀地了解設(shè)備基本情況及歷史缺陷等。
(4)行為識(shí)別功能
可通過(guò)證件照及人臉識(shí)別判斷目標(biāo)資質(zhì),將判斷結(jié)果進(jìn)行語(yǔ)音播報(bào)或通過(guò)AR眼鏡顯示。可通過(guò)智能頭盔攝像頭識(shí)別作業(yè)人員是否佩戴安全帽,是否穿工作服,是否攀高以及判斷是否跌落,識(shí)別結(jié)果可通過(guò)后臺(tái)進(jìn)行告警以及語(yǔ)音播報(bào)。智能頭盔可實(shí)現(xiàn)語(yǔ)音指令輸入,可進(jìn)行語(yǔ)音—文本相互轉(zhuǎn)換操作,實(shí)現(xiàn)表單業(yè)務(wù)語(yǔ)音錄入功能,可結(jié)合電子圍欄進(jìn)行隱患推送,當(dāng)作業(yè)人員靠近危險(xiǎn)區(qū)域時(shí),頭盔進(jìn)行語(yǔ)音播報(bào)提醒。
(5)現(xiàn)場(chǎng)記錄
智能頭盔內(nèi)置16 G至64 G內(nèi)存,支持T-Flash卡擴(kuò)展(最大支持128 G)。智能頭盔本地可保持現(xiàn)場(chǎng)的記錄包含錄像、錄音、拍照、對(duì)講記錄、電話(huà)記錄、模塊運(yùn)行記錄、電池電量記錄、流量記錄、警報(bào)信息記錄、硬件狀態(tài)信息等。
(6)定位功能
智能頭盔可實(shí)現(xiàn)室內(nèi)外精確定位,同時(shí)支持GPS定位和北斗定位,支持?jǐn)U展室內(nèi)采用UWB定位技術(shù)誤差可控制在厘米級(jí)別。UWB人員定位拓?fù)淙鐖D3所示。位置感知層通過(guò)空間基站和頭盔中的定位標(biāo)簽確定現(xiàn)場(chǎng)人員的實(shí)時(shí)位置,網(wǎng)絡(luò)傳輸層將測(cè)得的現(xiàn)場(chǎng)人員實(shí)時(shí)位置傳輸至應(yīng)用層,將位置在顯示屏上實(shí)時(shí)顯示。
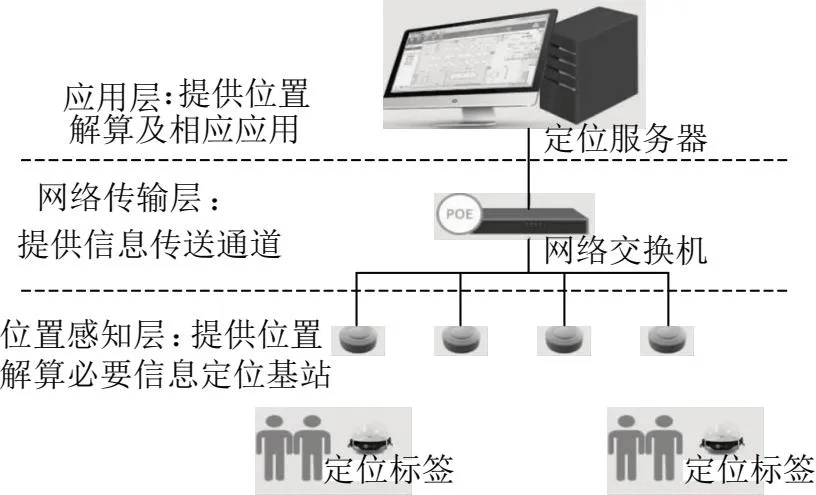
圖3 UWB人員定位拓?fù)鋱D
4 UWB定位技術(shù)研究測(cè)試
4.1 定位設(shè)備設(shè)計(jì)
對(duì)UWB室內(nèi)定位技術(shù)方案進(jìn)行研究測(cè)試,包含定位模塊集成、室內(nèi)地圖測(cè)繪、基站部署和電子圍欄。
(1)定位模塊集成
定位模塊集成是指將定位芯片集成到頭盔,主要考慮到核心板結(jié)構(gòu)更改,外觀結(jié)構(gòu)設(shè)計(jì),以及定位天線(xiàn)與原有4G、wifi、gps等天線(xiàn)是否有干擾。采用實(shí)時(shí)定位測(cè)距功能的無(wú)線(xiàn)傳輸模塊dwm1000,定位的原理為通過(guò)標(biāo)簽發(fā)送和接收到時(shí)間差來(lái)確定空間基站到現(xiàn)場(chǎng)人員智能頭盔上標(biāo)簽之間的距離。dwm1000模塊功耗低,接口為slave-only模式的spi接口,無(wú)線(xiàn)收發(fā)模塊為cmos大規(guī)模集成電路單芯片usb模塊。dwm1000模塊的結(jié)構(gòu)如圖4所示。芯片內(nèi)部包含模擬接收器,模擬發(fā)射器,狀態(tài)控制器等。Dw1000與外接天線(xiàn)構(gòu)成了完整的dwm1000模塊。單片機(jī)作為通訊主機(jī)起著提供串行時(shí)鐘信號(hào)的作用。Cs作為片選信號(hào),當(dāng)存在多個(gè)spi時(shí)可以在通訊設(shè)備中進(jìn)行挑選。Miso用于發(fā)送需要傳輸?shù)男盘?hào),plo定義總線(xiàn)空閑電平的數(shù)值,pha用于確定在不同時(shí)鐘邊沿觸發(fā)的點(diǎn)。
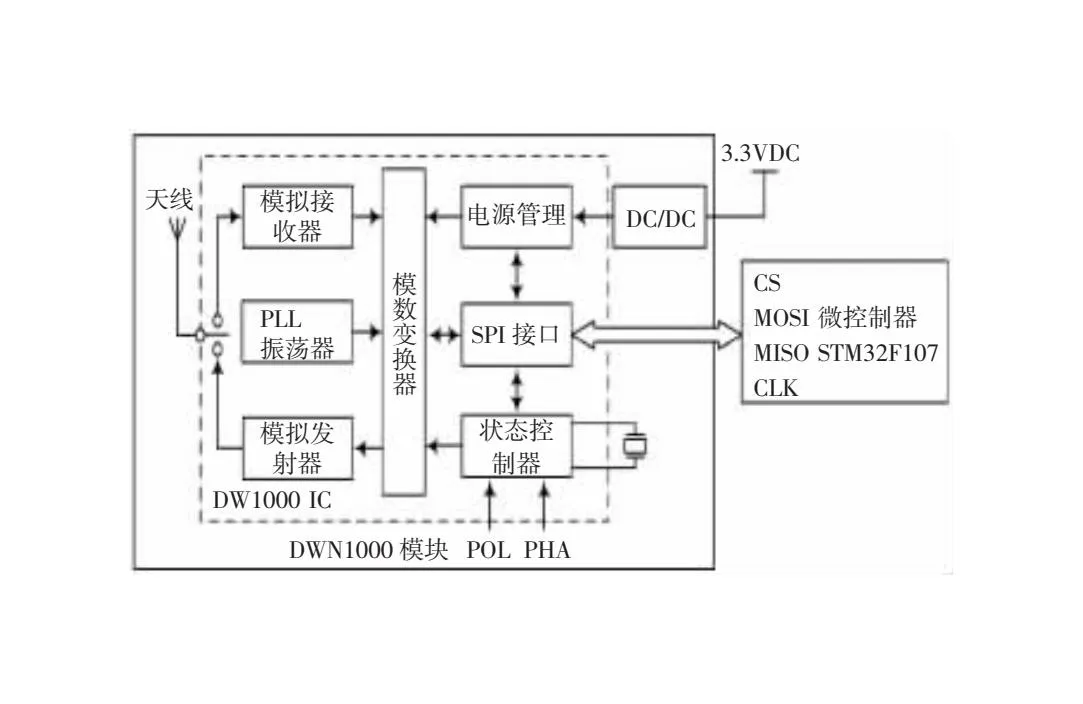
圖4 dwm1000模塊結(jié)構(gòu)
(2)室內(nèi)地圖測(cè)繪
室內(nèi)地圖的測(cè)繪,包含室內(nèi)地圖的繪制與測(cè)量,室內(nèi)地圖的繪制,使用普通平面圖即可,繪制完之后,需要使用激光測(cè)距儀[21]等尺寸測(cè)量工具,校準(zhǔn)平面圖的精度,這個(gè)精度最終會(huì)影響室內(nèi)定位的效果呈現(xiàn)。試驗(yàn)地圖及基站標(biāo)注如圖5所示。

圖5 試驗(yàn)地圖及基站標(biāo)注示意圖
(3)基站部署
通過(guò)室內(nèi)平面圖,選擇基站最佳部署位置,充分了考慮室內(nèi)環(huán)境(混凝土墻、障礙物等因素),根據(jù)環(huán)境調(diào)整基站位置,確定好基站位置之后,進(jìn)行基站的安裝,同時(shí)測(cè)量基站的位置,將基站的坐標(biāo)存入數(shù)據(jù)庫(kù)。基站坐標(biāo)配置如表2所示。
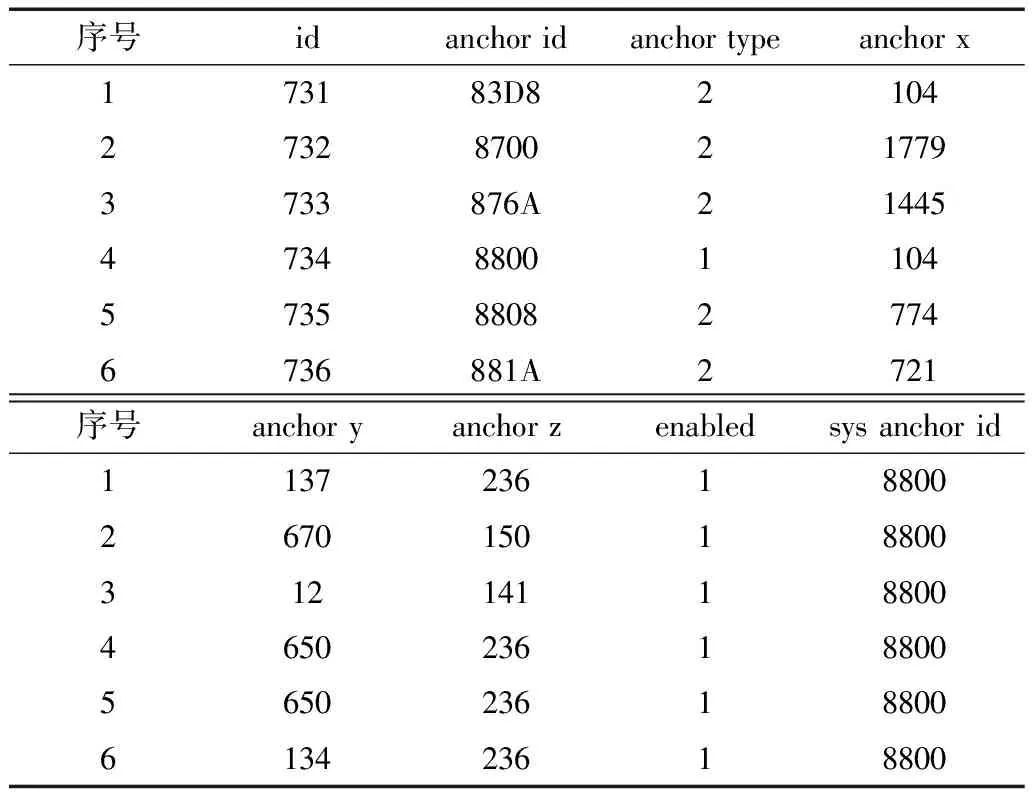
表2 基站坐標(biāo)配置
定位系統(tǒng)參數(shù)配置如圖6所示。參數(shù)主要包含基站的通用配置,靜態(tài)IP配置等,一方面,檢測(cè)基站的狀態(tài);另一方面,配置好數(shù)據(jù)傳輸通道。

圖6 定位系統(tǒng)參數(shù)配置圖
定位數(shù)據(jù)的傳送,通過(guò)udp或者tcp協(xié)議,具體數(shù)據(jù)字段如表3所示。
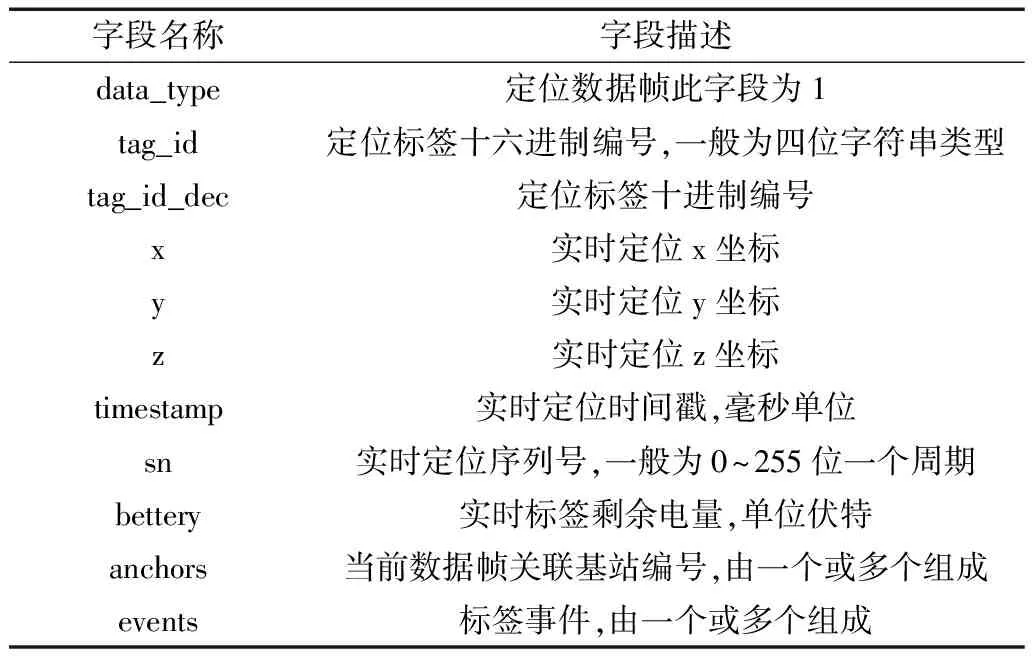
表3 數(shù)據(jù)字段描述
(4)電子圍欄
電子圍欄功能如圖7所示。在室內(nèi)地圖上圈定范圍,借助定位引擎返回的坐標(biāo),與電子圍欄范圍進(jìn)行比較,不斷計(jì)算目標(biāo)是否落入該范圍,只要落入該范圍則進(jìn)行告警。
4.2 實(shí)際應(yīng)用
為了檢驗(yàn)所設(shè)計(jì)基于UWB定位技術(shù)的作業(yè)風(fēng)險(xiǎn)管控智能終端設(shè)備室內(nèi)定位的準(zhǔn)確性。選擇了兩個(gè)實(shí)驗(yàn)人員佩戴智能頭盔在搭建的作業(yè)現(xiàn)場(chǎng),如圖8所示。圖中紅色的三角標(biāo)記為實(shí)驗(yàn)人員的位置。從圖中可以看到兩個(gè)實(shí)驗(yàn)人員的實(shí)時(shí)位置坐標(biāo),經(jīng)過(guò)驗(yàn)證,誤差率保證在厘米級(jí)別。

圖8 室內(nèi)定位示意圖
5 結(jié)束語(yǔ)
文中重點(diǎn)研究智穿戴設(shè)備在電網(wǎng)現(xiàn)場(chǎng)作業(yè)風(fēng)險(xiǎn)管理中的應(yīng)用,探索新型的現(xiàn)場(chǎng)風(fēng)險(xiǎn)管理可能性,融入現(xiàn)代科技,輔助現(xiàn)場(chǎng)管理人員開(kāi)展安全作業(yè)管理。主要研究成果如下:
(1)對(duì)比了不同定位技術(shù)之間的性能,介紹了UWB在現(xiàn)場(chǎng)定位技術(shù)中的應(yīng)用原理;
(2)設(shè)計(jì)了智能頭盔,實(shí)現(xiàn)現(xiàn)場(chǎng)工作人員定位、視頻采集、AR眼鏡、多種功能模塊,包括拍照、錄像、照明、對(duì)講、實(shí)時(shí)視頻等功能;
(3)對(duì)UWB室內(nèi)定位技術(shù)方案進(jìn)行研究測(cè)試,包含定位模塊集成、室內(nèi)地圖測(cè)繪、基站部署和電子圍欄。
猜你喜歡
開(kāi)放教育研究(2021年3期)2021-05-25 02:41:06
小學(xué)科學(xué)(學(xué)生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(shù)(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44