一種沖擊噪聲下的多目標(biāo)跟蹤算法
2024-02-25 14:12:12VUVanToi高洪元孫溶辰陳暄
應(yīng)用科技 2024年1期
VU Van Toi,高洪元,孫溶辰,陳暄
哈爾濱工程大學(xué) 信息與通信工程學(xué)院,黑龍江 哈爾濱 150001
目標(biāo)跟蹤是陣列信號處理領(lǐng)域的關(guān)鍵技術(shù),在雷達(dá)和通信感知系統(tǒng)中有廣泛的應(yīng)用。早期的跟蹤算法主要應(yīng)用于武器控制和導(dǎo)彈靶場測量,通過測量目標(biāo)信息,預(yù)測炮彈或?qū)椀奈磥砦恢茫M而引導(dǎo)火炮瞄準(zhǔn)并設(shè)定引信時間,或為導(dǎo)彈提供制導(dǎo)信息并計算著彈點[1]。傳統(tǒng)的跟蹤方法通過發(fā)射筆形單脈沖波束以接收單個目標(biāo)的回波,對目標(biāo)的方位、距離和多普勒等信息進行跟蹤,但存在精度不高且只能跟蹤一個目標(biāo)的問題[2]。隨著相控陣?yán)走_(dá)和高分辨估計技術(shù)的發(fā)展,以PARAFAC 算法和卡爾曼濾波(Kalman filtering,KF)等技術(shù)為代表的精密跟蹤方法得到了廣泛關(guān)注[3?4]。同時,隨著通信技術(shù)的發(fā)展和大規(guī)模陣列的普及,在通信場景下對多個終端目標(biāo)同時進行跟蹤的需求也越來越大,精密跟蹤算法在移動通信和自動駕駛等領(lǐng)域得到了應(yīng)用[5],研究其在雷達(dá)和通信感知系統(tǒng)中具有普適性的多目標(biāo)跟蹤算法具有重要的研究意義和價值。然而,現(xiàn)有的精密多目標(biāo)跟蹤算法和方位估計算法大多將噪聲建模為高斯白噪聲,這理想化的假設(shè)雖然使同等功率下估計的理論下界達(dá)到最低,但并不能保證算法在沖擊噪聲下仍具有魯棒性[6]。實際環(huán)境中,自然界中的雷電和海雜波引起的噪聲和許多人工噪聲都具有沖擊性[7],這給信號的檢測、估計和跟蹤帶來了巨大的挑戰(zhàn)。學(xué)者們使用多種厚拖尾的概率密度函數(shù)對沖擊噪聲進行建模,其中 α穩(wěn)定分布具有很好的普適性,由此也相應(yīng)地發(fā)展出許多去沖擊方法,具有代表性的有分?jǐn)?shù)低階統(tǒng)計量方法、零記憶非線性處理方法和濾波器方法[8?11]。
實時性是評估目標(biāo)跟蹤算法的重要指標(biāo)。為了對跟蹤方程進行快速求解,使用群智能算法是一種可行的方法。貓群算法是一種針對多維尋優(yōu)問題設(shè)計的群智能優(yōu)化算法,受貓群內(nèi)部的信息交流機制的啟發(fā),在復(fù)雜的多維多峰優(yōu)化問題中表現(xiàn)出較好的性能,但是收斂速度較慢。如何平衡開發(fā)與探索,即保證收斂到全局最優(yōu)的條件下,在有限的迭代次數(shù)內(nèi)得到盡可能高的收斂精度是智能優(yōu)化算法所面臨的共性難題。而量子群智能是一類優(yōu)化算法的統(tǒng)稱[12],量子群智能受量子物理中概念的啟發(fā),可以將量子原理與傳統(tǒng)的連續(xù)或離散優(yōu)化算法結(jié)合,用模擬的量子旋轉(zhuǎn)門對算法中的個體進行演化,獲得優(yōu)于原始算法的性能。
為了解決沖擊噪聲環(huán)境的動態(tài)跟蹤難題,本文提出了一種在沖擊噪聲下的魯棒多目標(biāo)跟蹤方法,在動態(tài)更新搜索區(qū)間的同時,設(shè)計了量子貓群算法對極大似然跟蹤方程進行求解,保證了算法的實時性、魯棒性和高精度。
1 沖擊噪聲下多目標(biāo)跟蹤數(shù)學(xué)模型
1.1 目標(biāo)信號模型
跟蹤問題可以等效為對角度等信息的參數(shù)估計。假設(shè)經(jīng)N個目標(biāo)反射后的回波信號入射到M個陣元的陣列上,在t時刻,經(jīng)第n個跟蹤目標(biāo)反射后的回波信號表示為sn(t),其角度為 θn,則第m個陣元接收到的數(shù)據(jù)為
式中:amn為陣列對回波信號的響應(yīng),n(t)為噪聲。則陣列接收數(shù)據(jù)也可以表示成矢量形式具體為
式中:θ=[θ1,θ2,···,θN];A(θ)為陣列流型矩陣,其每一列對應(yīng)一個目標(biāo)的導(dǎo)向矢量。陣列接收到的數(shù)據(jù)將被采樣,采樣后的離散數(shù)據(jù)表示為x(k) ,k=1,2,···,K。則對于靜止目標(biāo),其協(xié)方差矩陣的估計公式為
而對于運動目標(biāo),由于導(dǎo)向矢量a(θ)將隨時間變化,故需要按時間順序進行下一脈沖時刻協(xié)方差矩陣的更新,協(xié)方差矩陣的更新公式為
即需先逐個計算單個脈沖數(shù)據(jù)的協(xié)方差R(k)=x(k)xH(k)后,帶入式(1)得到更新后的協(xié)方差(k), 0 <μ<1稱為遺忘系數(shù),當(dāng)遺忘系數(shù) μ取值較大時,當(dāng)前時刻的數(shù)據(jù)所占比重較大,而過去時刻數(shù)據(jù)的占比相應(yīng)減小,使算法的跟蹤能力較強,但是穩(wěn)定性較差;而 μ取值較小時,算法的穩(wěn)態(tài)性能更好,但難以對快速運動的目標(biāo)進行準(zhǔn)確跟蹤。
由于陣列流型矩陣A(θ)中的每一列將隨時間變化,因此信號子空間支撐的范圍也將隨時間發(fā)生變化。
式中:Q(k)=[Qs(k)Qn(k)]為協(xié)方差矩陣R(k)的特征矢量,由信號子空間和噪聲子空間的正交基組成;Ds(k)是由信號特征值組成的對角陣;σ2(k)為噪聲的特征值。為了同時跟蹤多個目標(biāo),將子空間跟蹤法與來波方向(direction of arriva,DOA)估計器結(jié)合是一種常用的方法,即在每個時刻,將更新后的子空間輸入到DOA 估計器中得到角度隨時間變化的結(jié)果,實現(xiàn)多目標(biāo)跟蹤。但這種方法存在無法解相干的問題。除此之外,傳統(tǒng)的方法對噪聲進行了理想化的假設(shè),使其難以在工程實際中表現(xiàn)出預(yù)期的性能。本文將在1.2 和1.3 小節(jié)中針對這些問題設(shè)計新的多目標(biāo)跟蹤方法。
1.2 沖擊噪聲的建模
多數(shù)的研究將噪聲建模為高斯白噪聲,即假設(shè)噪聲子空間中的特征值σ2(k)為常數(shù),此時噪聲子空間是球形的。但實際應(yīng)用中,陣列接收到噪聲常具有沖擊性,這將會對跟蹤算法的精度產(chǎn)生很大影響,甚至使其失效。本文中將沖擊噪聲建模為服從 α穩(wěn)定分布的隨機變量。
對稱 α穩(wěn)定分布被廣泛應(yīng)用于對雷達(dá)雜波進行建模,其特征函數(shù)具有如下形式:
式中: α為特征指數(shù),滿足0 <α ≤2,特征指數(shù)反映了噪聲在時域的沖擊性, α越大沖擊性越強,概率密度拖尾也越厚; γ為分散系數(shù),γ=1時為標(biāo)準(zhǔn)α穩(wěn)定分布噪聲; μ為位置參數(shù),滿足?∞<μ≤∞,代表了隨機變量的中值或均值。
已有的研究表明,通過使用高斯核函數(shù),可以有效地濾除沖擊噪聲[13]。本文設(shè)計了一種零記憶非線性預(yù)處理方法,通過從空域維度對每個采樣時刻的數(shù)據(jù)進行加權(quán),將沖擊噪聲轉(zhuǎn)化為方差為有限值的噪聲,并使輸出數(shù)據(jù)近似地服從高斯分布,具體步驟如下:首先在第k個采樣時刻,取M個陣元的采樣值的絕對值中最大值和最小值分別為
由此定義基于高斯核函數(shù)的加權(quán)函數(shù)為
式中 ω為高斯核的超參數(shù)。高斯核加權(quán)也可以理解為由陣列輸出指數(shù)加權(quán)的無窮范數(shù)歸一化處理[14],由于加權(quán)函數(shù)的值只與當(dāng)前時刻的陣列輸出相關(guān),即具有零記憶特性,相比于時域濾波等傳統(tǒng)抗沖擊方法更適合對動態(tài)目標(biāo)進行處理;而高斯核函數(shù)的非線性特性也使這種方法相對于低階矩等方法在強沖擊環(huán)境下魯棒性更強。經(jīng)加權(quán)后的第m個陣元的輸出為
將第m個陣元加權(quán)后的全部數(shù)據(jù)寫成向量形式為
按照式(2)完成更新后,最近時刻的快拍數(shù)據(jù)將獲得最大的權(quán)重,而之前時刻數(shù)據(jù)的權(quán)重隨時間衰減,達(dá)到目標(biāo)點跡平滑的目的。
1.3 極大似然多目標(biāo)跟蹤方程
當(dāng)信號為相干信源時,無法通過特征分解得到準(zhǔn)確的信號或噪聲子空間,子空間類的跟蹤算法將無法跟蹤多個目標(biāo)。針對這一問題,本文將根據(jù)極大似然原理,推導(dǎo)多目標(biāo)跟蹤的似然函數(shù)。
首先,為了使模型與觀測數(shù)據(jù)的距離最小化,定義誤差函數(shù)為
將A(θ)視為常量,針對信號波形進行求解得到(k)=(A(θ)HA(θ))?1A(θ)Hy(k)并帶回式(3),得
利用正交投影得性質(zhì),可以將最小化f(θ,k)轉(zhuǎn)化為最大化的優(yōu)化問題,由此定義似然函數(shù)L(θ,k)為
式中PA(θ)=A(θ)(A(θ)HA(θ))?1A(θ)H為陣列流型矩陣的投影矩陣,使似然函數(shù)最大即可得到對來波方向的最大似然估計結(jié)果,將這一過程表示為估計方程如下
2 基于量子貓群算法的多目標(biāo)跟蹤
由于多目標(biāo)跟蹤方程沒有閉式解,傳統(tǒng)的網(wǎng)格搜索耗時巨大且有量化誤差,本文設(shè)計了一種新的量子群智能算法,稱為量子貓群算法(quantum cat swarm optimization, QCSO)對其進行快速求解。
2.1 量子貓群算法
量子貓群算法借鑒了貓群算法的原理,對狩獵過程中貓種群內(nèi)的交流聯(lián)系機制進行研究,在貓捕食獵物的過程中,每個量子貓綜合考慮與當(dāng)前種群中的多個的量子貓的距離,模仿貓之間信息交流包圍獵物,并將量子貓的搜索空間轉(zhuǎn)換為量子態(tài)的量子貓個體,具體的數(shù)學(xué)模型和尋優(yōu)機制如下。
在P維的搜索空間中,量子貓的個數(shù)為L,最大迭代次數(shù)為G,當(dāng)前迭代數(shù)為g,g∈[1,G],第g次迭代中第l個量子貓記為量子貓的優(yōu)劣由適應(yīng)度值的大小決定,標(biāo)記為。規(guī)定適應(yīng)度最大和最小的量子貓為最優(yōu)量子貓和最差量子貓,適應(yīng)度分別為和。
在量子貓算法中,使用模擬量子旋轉(zhuǎn)門實現(xiàn)量子貓捕食獵物的尋優(yōu)搜索過程,在第g次迭代中,首先計算參數(shù)
由此計算全部量子貓中的適應(yīng)度大于 ξg的個數(shù)為
每個量子貓根據(jù)自身與適應(yīng)度排名前Qg的量子貓的距離確定運動方向與距離。由此得到第l個量子貓的第p維向第q個量子貓的第p維運動量子旋轉(zhuǎn)角計算公式為
式中(q)為[0,1]的均勻隨機數(shù)。另外規(guī)定,若(q)=0,則令
式中sign為符號判決函數(shù)。
使用模擬量子旋轉(zhuǎn)門計算第l個量子貓的第p維向第q個量子貓的第p維運動的位移分量(q),位移分量的計算公式為
則運動后的第l個 量子貓的第p維取值為
得到新一代的量子貓種群后,判斷是否達(dá)到最大迭代次數(shù),當(dāng)?shù)瓿珊髮⒆顑?yōu)量子貓的位置映射到解空間輸出。量子貓群算法適當(dāng)?shù)仄胶饬怂惴ǖ娜趾途植克阉髂芰Γ瑢崿F(xiàn)高效的尋優(yōu)搜索且不易陷入局部最優(yōu)。
2.2 量子貓群算法在多目標(biāo)跟蹤中的應(yīng)用
使用量子貓群算法對多目標(biāo)跟蹤方程進行求解時,設(shè)定搜索空間為角度空間,即P=N,建立量子態(tài)的量子貓個體與其在搜索范圍中的映射態(tài)的線性映射關(guān)系具體為
根據(jù)多目標(biāo)跟蹤方程定義量子貓個體的適應(yīng)度函數(shù)為
在收到第一個回波信號并得到估計結(jié)果后,根據(jù)這一結(jié)果縮小搜索范圍,以節(jié)省計算量,搜索范圍的下界與上界的更新公式分別為
量子貓群算法的最大迭代次數(shù)由當(dāng)前搜索范圍的最大值向下取整得到
基于量子貓群算法的多目標(biāo)跟蹤算法步驟總結(jié)如下:
1)陣列接收回波信號后進行采樣,并進行加權(quán)處理;
2)按照式(1)對協(xié)方差矩陣進行更新;
3)根據(jù)前一時刻的信息,按照式(4)和式(5)確定搜索邊界;
4)根據(jù)式(6)確定算法的迭代次數(shù),用量子貓群算法對多目標(biāo)跟蹤方程進行求解,在達(dá)到最大迭代次數(shù)后,輸出當(dāng)前時刻點的估計值;
5)獲取下一個脈沖回波數(shù)據(jù)后返回步驟1)否則輸出跟蹤結(jié)果。
3 仿真實驗
本節(jié)通過設(shè)計仿真實驗對所提出的沖擊噪聲下基于量子貓群的多目標(biāo)跟蹤方法進行性能對比。
實驗1 首先對比了QCSO 在不同維度的測試函數(shù)上與幾種傳統(tǒng)算法的收斂性能。對比算法包括改進的并行貓群算法[15](enhanced cat swarm optimization, CSO)、原始的貓群算法[16](cat swarm optimization, CSO)、遺傳算法(genetic algorithm,GA)和粒子群算法(particle swarm optimizer, PSO),對比算法參數(shù)設(shè)置見相應(yīng)參考文獻。選取的標(biāo)準(zhǔn)測試函數(shù)的表達(dá)式為
式中D為 搜索空間的維度。D取2、10 和100 的條件下得到的收斂精度隨迭代數(shù)變化曲線分別如圖1 所示。
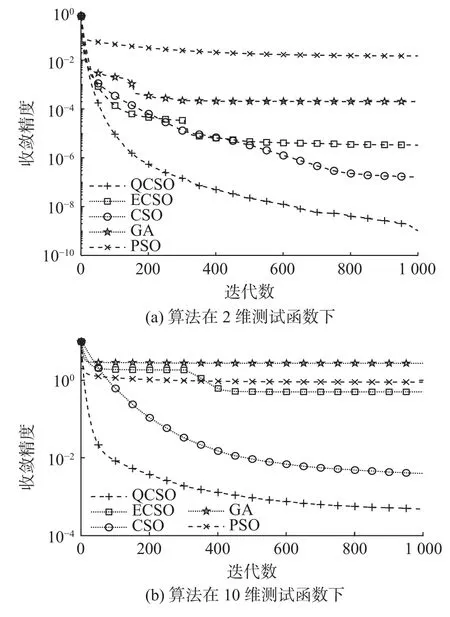
圖1 收斂精度隨迭代數(shù)變化曲線
從仿真結(jié)果可以看出,所設(shè)計的量子貓群算法在不同維度的優(yōu)化問題中都表現(xiàn)出更快的收斂速度,達(dá)到最大迭代數(shù)后的收斂精度也更高。
在測試函數(shù)上的表現(xiàn)證明了所設(shè)計的算法具有較強的尋優(yōu)搜索能力。接下來將在不同的噪聲背景下,對比所設(shè)計方法與現(xiàn)有方法對多目標(biāo)跟蹤的性能。
實驗2假設(shè)空間中同時存在2 個相干目標(biāo),回波信號從不同方向入射到均勻線陣上,仿真實驗中采用2 個同頻同相的等功率正弦波,頻率均為1 GHz,角度隨時間變化規(guī)律為:θ1(k)=20+k/50,θ2(k)=80?3k/100,k=1,2,···,500,陣列采樣頻率為1 kHz,持續(xù)時間為0.5 s,陣元數(shù)為8。規(guī)定每個脈沖下,對于每個目標(biāo),跟蹤角度結(jié)果與實際角度的差值低于1°為跟蹤成功。對比方法包括基于分?jǐn)?shù)低階協(xié)方差(fractional low-order covariance,FLOC)的跟蹤方法[17?18]、基于無窮范數(shù)歸一化的跟蹤方法[19]和基于共變矩(robust covariation,ROC)的跟蹤方法[20]。當(dāng)沖擊噪聲的特征指數(shù)固定為1.2 和1.6 時,得到的跟蹤成功概率隨信噪比變化曲線分別如圖2 所示。固定信噪比為15 dB,仿真跟蹤成功概率隨特征指數(shù)變化曲線如圖3 所示,特征指數(shù)為1.6 時的跟蹤結(jié)果的示意如圖4所示。

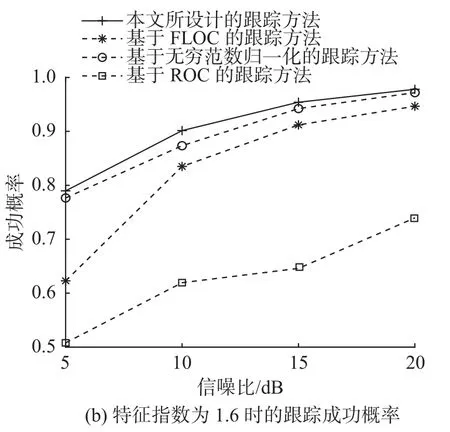
圖2 跟蹤成功概率變化曲線
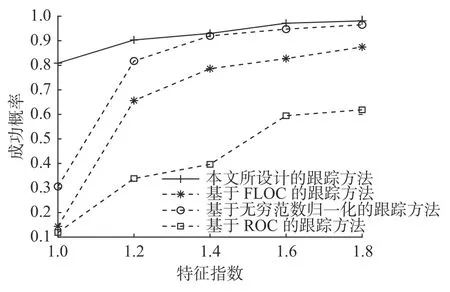
圖3 跟蹤成功概率隨特征指數(shù)變化曲線
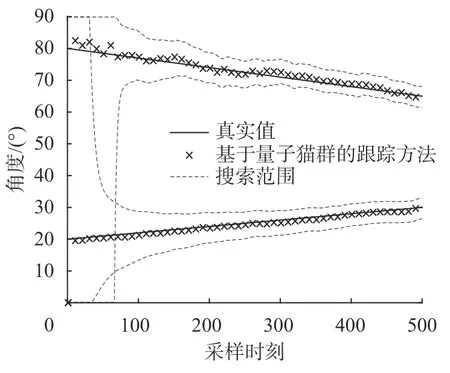
圖4 2 個目標(biāo)情況下的跟蹤示意
從仿真結(jié)果可以看出,本文所提出的沖擊噪聲下的多目標(biāo)跟蹤方法在不同信噪比和不同特征指數(shù)的都較傳統(tǒng)方法有性能優(yōu)勢。尤其是在特征指數(shù)較小(強沖擊)和信噪比較低的環(huán)境下,本文所提方法的性能優(yōu)勢更明顯,具有很好的魯棒性。
實驗3假設(shè)空間中存在4 個部分相關(guān)的目標(biāo),信號形式同上但信號幅值服從高斯分布,即這4 個目標(biāo)兩兩之間的相關(guān)系數(shù)介于0 與1 之間。角度隨時間變化規(guī)律分別為
其他參數(shù)設(shè)置不變。角度隨時間變化的規(guī)律用實線標(biāo)注,跟蹤結(jié)果用不同的圖形標(biāo)注如圖5。
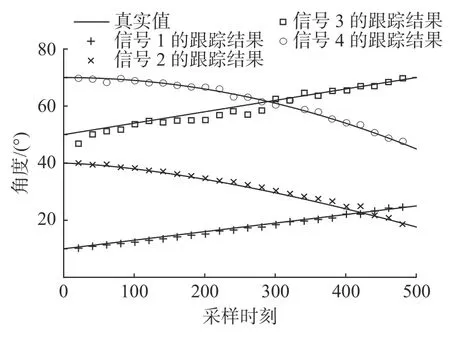
圖5 4 個目標(biāo)情況下的跟蹤示意
由圖5 可以看出,信號在角度空間雖然發(fā)生了交疊,但所設(shè)計的方法可以分辨多個目標(biāo)并進行有效跟蹤。需要注意的是,目標(biāo)相對于陣列的角度變化規(guī)律體現(xiàn)為運動軌跡,與信號之間的相關(guān)性在物理意義上無關(guān)。
從以上仿真結(jié)果可以看出,本文所提方法可以對獨立、部分相關(guān)和全相干的多目標(biāo)進行高效準(zhǔn)確跟蹤,適合應(yīng)用于偵察和火控雷達(dá)系統(tǒng)中。
4 結(jié)論
本文針對沖擊噪聲環(huán)境下的多目標(biāo)跟蹤問題,設(shè)計了新的抗沖擊方法,推導(dǎo)了極大似然多目標(biāo)動態(tài)跟蹤方程,并設(shè)計了一種新的量子智能優(yōu)化算法對其進行高效求解,具體的結(jié)論如下:
1)構(gòu)造了一種新的基于零記憶非線性處理的抗沖擊預(yù)處理方法,在沖擊噪聲背景具有魯棒性且在不同信噪比條件下都表現(xiàn)出優(yōu)于現(xiàn)有抗沖擊方法的性能,尤其在強沖擊環(huán)境下性能優(yōu)勢更明顯。
2)推導(dǎo)了的極大似然多目標(biāo)跟蹤方程,解決了現(xiàn)有的基于子空間更新的動態(tài)跟蹤方法無法對相干信源進行跟蹤的問題,突破了應(yīng)用局限。
3)設(shè)計了一種新的量子貓群算法,為對多目標(biāo)跟蹤方程進行快速、準(zhǔn)確的求解。所設(shè)計的算法通過應(yīng)用量子機制,在收斂速度和收斂精度上較傳統(tǒng)的優(yōu)化算法具有優(yōu)勢,可以實現(xiàn)無量化誤差的求解。
仿真實驗證明,本文提出的基于量子貓群算法的動態(tài)跟蹤方法在不僅在沖擊噪聲下具有很好的魯棒性,在高斯噪聲背景下也同樣適用。且具有實時性好的優(yōu)點,在先進的精密跟蹤雷達(dá)和通信感知系統(tǒng)中有廣泛應(yīng)用前景。本文所設(shè)計的量子貓群算法是一種高效的尋優(yōu)搜索算法,也可以被應(yīng)用于解決其他工程問題。下一階段將繼續(xù)研究抗沖擊性能更優(yōu)的處理方法,進一步提高精密跟蹤系統(tǒng)的性能,促進智能信號處理技術(shù)的發(fā)展。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56