高速水下無人航行器仿生外形設計與阻力數值預報研究
2024-02-25 14:12:18馬鏡蘭飛翔游航
應用科技 2024年1期
關鍵詞:模型
馬鏡,蘭飛翔,游航
1. 海裝裝備項目管理中心,北京 100071
2. 哈爾濱工程大學 水下機器人技術重點實驗室,黑龍江 哈爾濱 150001
3. 哈爾濱工程大學 南海研究院,海南 三亞 572000
隨著科技的進步,水下無人航行器(unmanned underwater vehicles, UUV)在海洋能源開發、海底地形勘探、海洋科學考察、海洋權益維護、水下智能武器等方面都有著廣泛的用途[1]。為滿足各種復雜場合的應用,水下無人航行器的發展逐漸向系列化、大海深、長航時、高性能和高仿生[2]方向發展,其中高速和減阻是當前水下無人航行器的研究熱點。本文針對某高速水下無人航行器的減阻問題開展研究。
對于減小UUV 艇體的阻力,大體可以從2 個方面進行研究:一種是采用流線型艇體并對其進行一定的優化設計;另外一種則是盡量避免突出艇身之外的附體。水下無人航行器的外形設計以回轉體外形作為主流方向,如Seahorse AUV[3]、Autosub AUV[4]等,此外還有扁平形、仿生形以及特殊的外形,例如類似于“比目魚”的 “SeaOtter”號[5]、 Talisman AUV[6]以及仿生蝠鲼機械魚[7]等。通常來講,回轉體外形相比其他形狀具有更好的水動力性能,且結構簡單,制作方便。
目前研究水下無人航行器阻力的方法主要有理論分析、試驗測量和計算流體力學(computational fluid dynamics, CFD)方法。其中, 理論分析的結果帶有普遍性, 但往往要對計算對象進行抽象和簡化才能得到理論解;試驗測量方法可以得到真實可信的試驗結果, 但是具有周期長、費用高、測試設備復雜和流動可視化困難等缺點;而CFD 方法克服了前2 種方法的弱點, 可以形象再現流場流動細節,且周期短,可以節省人力物力, 具有很好的重復性, 并且方便設置各個參數的變化及考察它們的影響。計算流體力學發展到如今已經相當成熟,數值模擬的精度可以部分替代大量模型試驗,CFD 已經成為獲取水下無人航行器水動力的重要手段。操盛文等[8]預報了高雷諾數條件下,艇體主尺度與計算域網格數量對潛艇阻力預報結果的影響,得到了網格數量和尺度效應對潛艇阻力數值預報結果的影響規律。李鵬等[9]探究不同湍流模型對直航潛艇阻力和流場仿真的影響。梁晶等[10]預報了帶鰭舵的某無人水下航行器阻力特性。劉天天[11]計算了幾何參數對不同形狀的水滴形潛器和細長回轉體潛器阻力系數的影響。Karim 等[12]基于雷諾平均方程(Reynolds average Navier-Stockes, RANS)的有限體積法,用非結構網格計算二維軸對稱裸潛艇殼體繞流。Vaz 等[13]采用CFD 方法計算了SUBOFF 模型進行操縱運動所受到的力。徐妍等[14]對7 種不同附體布置的SUBOFF 潛艇模型進行直航運動的數值仿真,分析潛艇表面壓力分布情況和潛艇周圍速度場特性。
本文基于CFD 技術,針對SUBOFF 潛艇模型及其試驗數據,研究了水下無人航行器阻力預報方法,通過與試驗數據的對比驗證了計算方法的可靠性。在此基礎上,參考水下高速游動海洋生物海豚和鯊魚設計了水下無人航行器仿生外形,預報了SUOBFF 光體模型、仿海豚模型和仿鯊魚模型的阻力性能,基于計算結果設計了回轉體外形,通過計算比較完成了UUV 外形的設計工作。
1 水下無人航行器阻力數值計算方法
1.1 計算模型
針對SUBOFF 標準模型,美國泰勒水池進行了大量的風洞和拖曳水池試驗,為計算流體力學的研究人員提供了可靠的試驗數據,相關的試驗結果可以參考文獻[15]。本節利用SUBOFF 全附體模型進行數值計算方法研究,并將其計算結果將與后續模型進行阻力性能對比。
SUBOFF 全附體模型主要包括1 個水滴形的主體部分、1 個圍殼和4 個對稱的尾翼[16],表1 列出了模型的主要參數。數值計算對象分別為全附體的SUBOFF 模型,記為SUBOFF-1,其三維視圖見圖1,去除圍殼和十字翼的光體SUBOFF 模型,記為SUBOFF-2。
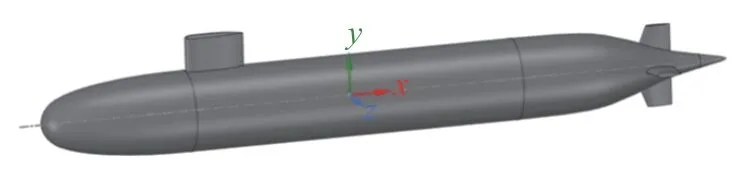
圖1 SUBOFF 模型
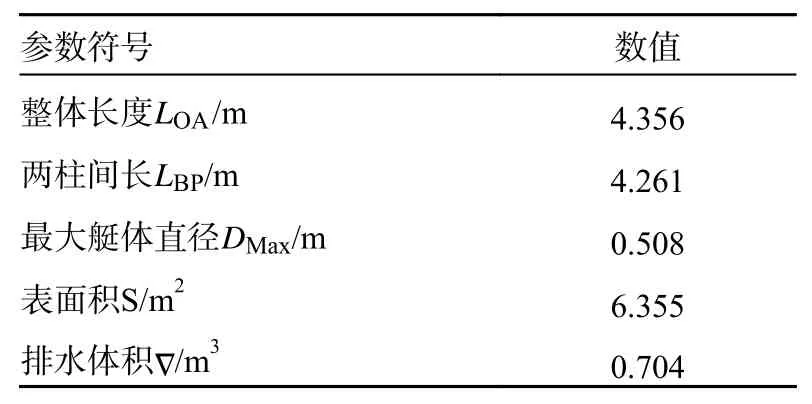
表1 SUBOFF 模型尺度
1.2 計算域及網格劃分
計算域采用圓柱形,并用貼體坐標對計算域進行離散,使計算域的邊界與坐標曲面一致,并盡量減少貼體坐標中的奇異點,并使網格的分布符合實際模型。為準確捕獲近壁區的流場、提高計算精度、節約計算時間,在SUBOFF 模型周圍進行網格加密,在遠離模型的流場中網格較粗。計算區域由四面體非結構化的網格來進行離散,計算域和模型表面的網格分布如圖2(a)和圖2(b)所示,整個計算域體網格200 萬。

圖2 網格示意
1.3 阻力性能計算結果
采用耦合(coupled)方法與剪切應力運輸(shear stress transport, SST)k-ω湍流模型對雷諾平均納維–斯托克斯方程進行求解。在此基礎上,將壓力方程離散為標準的離散形式,將動量方程、湍流方程和雷諾應力方程分別用二次迎風格式進行離散[17]。以SUBOFF-1 模型在3.046 m/s 的航速下為例,其計算結果的收斂情況如圖3 所示,可以看出其阻力值在0.01 N 內波動,即相對于該航速的總阻力其波動在總阻力的萬分之一內,說明計算結果收斂。其他模型和航速的計算結果在此不再贅述。
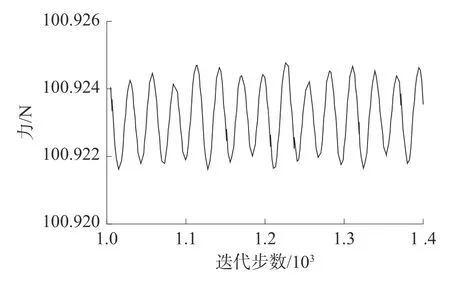
圖3 SUBOFF-1 在航速為3.046 m/s 下的計算結果
圖4 為SUBOFF-1 模型在3.046 m/s 的航速下的艇體表面壓力圖,艇艏、圍殼以及尾翼為高壓的,兩者面對來流方向都產生了高壓區。在圍殼尾部形狀收縮使邊界層分離,壓力急劇減小,這也是產生壓差阻力的原因,與實際流場分布一致。
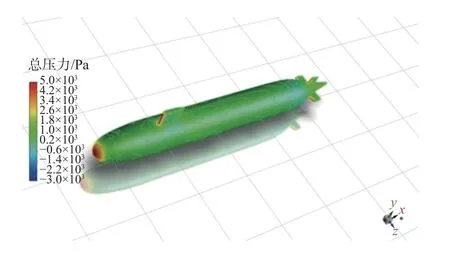
圖4 SUBBOFF-1 壓力分布云圖
SUBOFF 潛艇全附體外形和光體外形的阻力計算結果見表2 和表3。附體對SUBOFF 潛艇總阻力的影響較大,相比于全附體模型,光體模型總阻力最多減小超過20%,且隨航速的增加,摩擦阻力占總阻力的比值逐漸降低,由3.046 m/s 航速時的83.73%下降到15.432 m/s 航速時的79.66%,相應的壓差阻力發生了同等比例的增加。
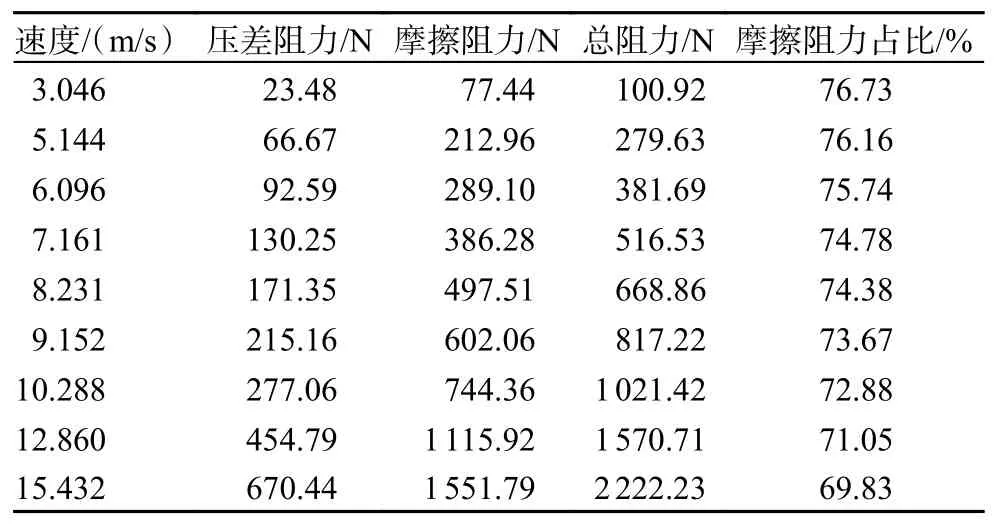
表2 SUBOFF-1 計算結果
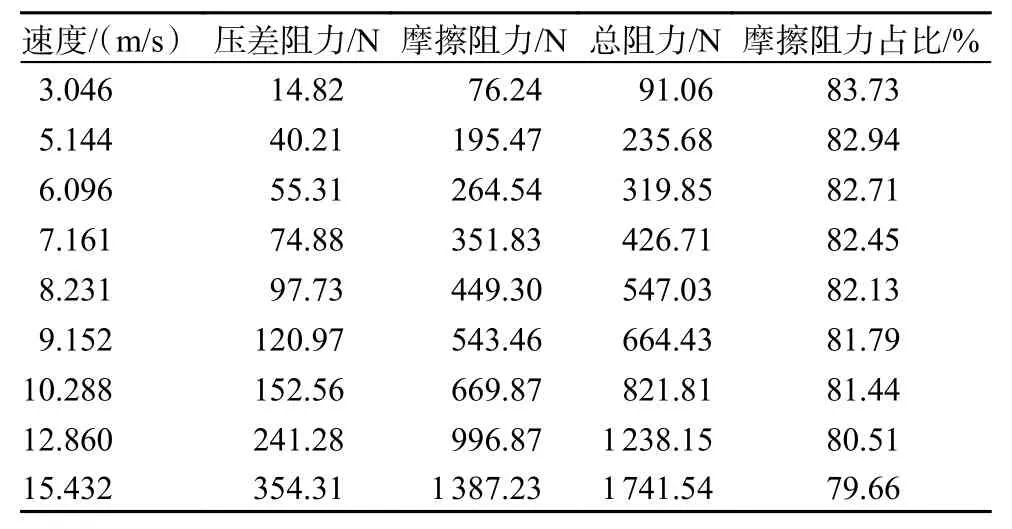
表3 SUBOFF-2 計算結果
對于全附體的SUBOFF-1 模型,對數值計算結果和試驗結果進行比較,具體結果見圖5,SUBOFF 艇體的阻力在速度為6.096 m/s 時,阻力計算值與試驗值誤差相差最大,為1.93%,6 個航速下的平均誤差為1.36%,試驗值和計算值吻合很好,由此可知本文采用的計算方法具有可靠的計算精度。
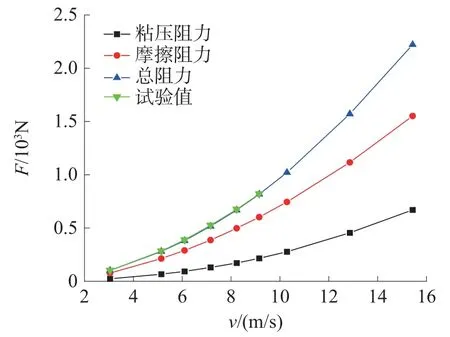
圖5 計算與試驗對比結果
2 仿海豚和仿鯊魚外形設計及阻力數值預報
2.1 計算模型
2.1.1 仿海豚模型
仿海豚模型的原始模型通過三維掃描方式重構建模獲得,為使計算具有可比性,仿海豚模型長度與標準SUBOFF 模型艇長一致,即艇長都為4.356 m。對仿海豚模型進行去附體處理,共得到3 種模型,第1 種為全附體模型,記為Haitun-1,見圖6(a);第2 種為去掉胸鰭后的模型,記為Haitun-2,見圖6(b);最后一種為光體的海豚模型,記為Haitun-3,見圖6(c)。
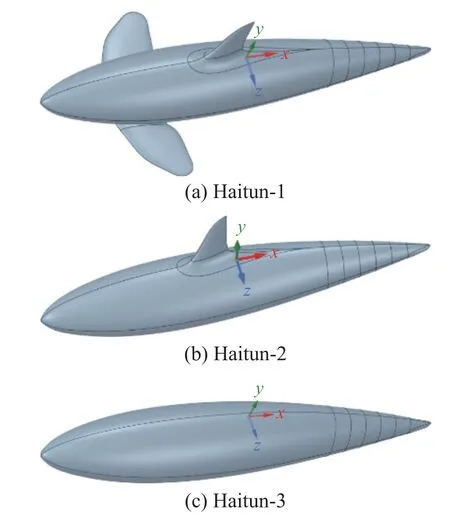
圖6 仿海豚三維模型示意
2.1.2 仿鯊魚模型
同樣,仿鯊魚模型長度與標準SUBOFF 模型艇長一致,即艇長都為4.356 m。對仿鯊魚模型進行去附體處理,共得到3 種模型,第1 種為全附體模型,記為Shayu -1,見圖7(a);第2 種為去掉胸鰭后的模型,記為Shayu -2 ,見圖7(b);最后1 種為光體的鯊魚模型,記為Shayu -3,見圖7(c)。
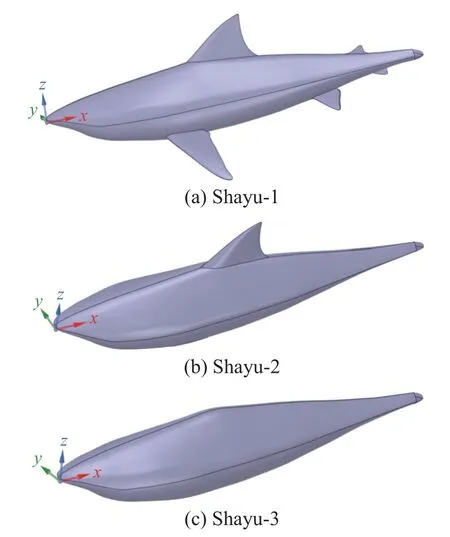
圖7 鯊魚三維模型示意
2.2 計算結果
2.2.1 仿海豚模型阻力計算結果
數值計算采用與標準SUBOFF 模型相同的邊界條件和計算網格。在9 個航速下Haitun-1、Haitun-2、 Haitun-3 共3 個模型各自的阻力計算結果見圖8。表4 給出了各海豚模型的摩擦阻力占總阻力的比值。
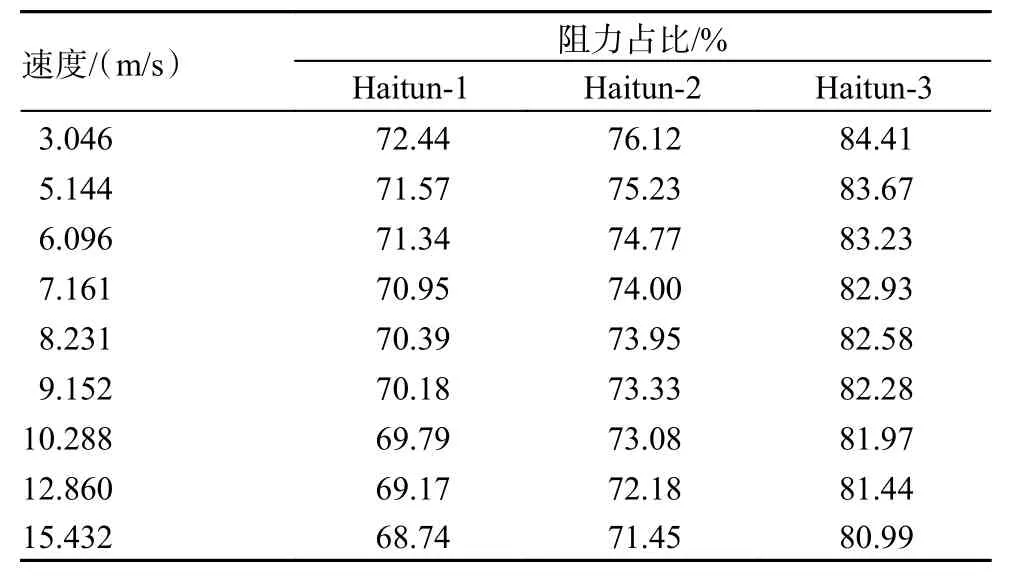
表4 海豚模型的摩擦阻力占總阻力比值
由表4 可以看出,隨著航速的增加,摩擦阻力和壓差阻力都在不斷地增加,但是摩擦阻力在總阻力中的占比逐漸減少,3 個模型在航速達到15.432 m/s 時,摩擦阻力占比相比3.046 m/s 時分別降低了3.70%、4.67%、3.42%,且其中光體模型的摩擦阻力占比最高。另外,不同的附體模型,摩擦阻力和壓差阻力的比值是不同的,即胸鰭和背鰭會使總阻力快速地增加,即在有背鰭的情況下,去掉胸鰭會引起總阻力減少20%以上;在無胸鰭的情況下,去掉背鰭會引起總阻力減少15%以上。另外通過數據對比發現,去掉胸鰭引起的阻力變化量隨速度相對恒定,而去掉背鰭引起的阻力的變化量會隨速度的增加有一定的增加。
2.2.2 仿鯊魚模型阻力計算結果
仿鯊魚模型Shayu-1、 Shayu-2、 Shayu-3 在9 個航速下各自的阻力計算結果分別見圖9(a)~圖9(c)。表5 給出各仿鯊魚模型的摩擦阻力占總阻力比值。
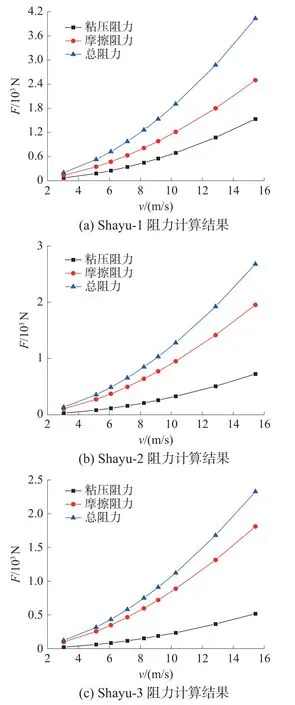
圖9 海豚模型阻力計算結果
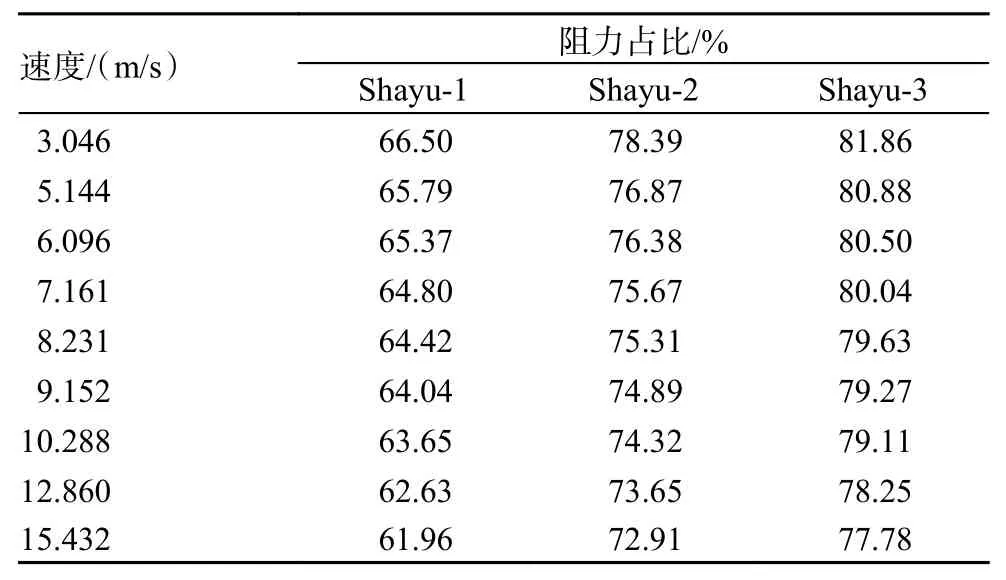
表5 各鯊魚模型的摩擦阻力占總阻力比值
表5 顯示隨著航速的增加,摩擦阻力和壓差阻力都在不斷地增加,但是摩擦阻力在總阻力中的占比逐漸減少,3 個模型在航速達到15.432 m/s時,摩擦阻力占比相比3.046 m/s 時分別降低了4.54%、5.48%、4.08%。另外,不同附體的仿鯊魚模型,其摩擦阻力和壓差阻力的比值是不同的,仿鯊魚模型的各魚鰭會使總阻力快速增加,即在有背鰭的情況下,去掉胸鰭、腹鰭、上臀鰭和下臀鰭會引起總阻力減少30%以上;在無胸鰭的情況下,去掉背鰭會引起總阻力減少10%以上。另外通過數據對比發現,去掉胸鰭引起的阻力變化量隨速度相對恒定,而去掉背鰭引起的阻力的變化量會隨速度的增加有約3%的增加。
3 高速水下無人航行器構型優選
3.1 SUBOFF、仿海豚模型和仿鯊魚模型阻力比較
為了比較不同模型的阻力性能,將前述計算的全部模型分為3 組,模型的艇長均相同,對于速度進行無量綱處理,采用雷諾數Re表征流體流動情況,Re定義如下:
式中:Re為雷諾數, ρ為流體密度,v為流體速度,L為艇體長度, μ為動力粘性系數。
采用阻力與排水重量的比值Kr作為阻力性能優劣的判斷指標,Kr定義如下:
式中:F為總阻力, ρ為流體密度,V為模型排水體積,g取9.8 m/s2。
對全附體的海豚模型和全附體的鯊魚模型,即Haitun-1 和Shayu-1 進行對比,Haitun-1 模型的排水重量為12 490.00 N,Shayu-1 的排水量為11 208.16 N,具體對比結果見圖10(a);對SUBOFF-1、Haitun-2 和Shayu-2 進行對比,SUBOFF-1 排水重量為6 890.58 N,Haitun-2 模型的排水重量為12 206.00 N, Shayu-2的排水重量為11 004.42 N,具體對比結果見圖10(b);對SUBOFF-2、Haitun-3 和Shayu-3 進行對比,SUB OFF-2 的排水重量為6 825.21 N,Haitun-3 模型排水量為12 081.34 N,Shayu-3 排水重量為10 916.32 N,對比結果見圖10(c);圖10(d)為以SUBOFF-2 為基準Haitun-3 和 Shayu-3 的減阻效果。
以上3 組對比結果都說明了在不同的附體情況下,以單位排水量的阻力為評價標準,海豚模型的阻力特性是最好的。但是通過不同組的對比,發現不同的附體對于結果也有很大的影響,可以看出在只有背鰭的情況下,海豚和鯊魚的阻力性能十分接近。圖10(d)表明基于SUBOFF-2 的阻力,在9 個航速下Haitun-3 的減阻效果都超過了22%,在雷諾數為6.7×107時,即航速為15.432 m/s時,其減阻效果達到了25.15%,而Shayu-3 的減阻效果在14%~18%波動,說明Haitun-3 的減阻效果最好。
3.2 水下無人航行器回轉體模型設計
觀察海豚的光體模型,此模型是左右對稱的,上半部分的弧度要比下半部分的高,將海豚模型在水平面做縱剖面,將得到的縱剖新做180°的回轉得到了一個新的模型,記為Haitun-4;再將海豚模型在豎直面做縱剖面,對于剖線的上下2 部分分別做360°的回轉,得到了2 個新的模型,分別記為Haitun-5 和Haitun-6,模型見圖11。
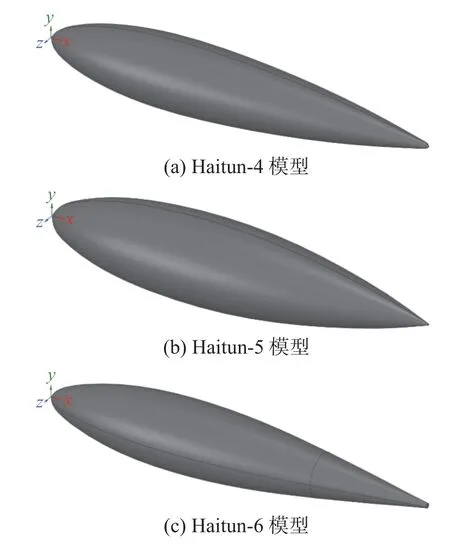
圖11 改進模型示意
3.3 回轉體模型計算結果和分析
Haitun-4、Haitun-5 和Haitun-6 共3 個回轉體模型的阻力預報結果如表6~8 所示。從表6~8 中可以簡單看出,Haitun-5 的阻力最大,其摩擦阻力占總阻力的比值是最小的,Haitun-4 的阻力在速度較小時略高于Haitun-6,在高速時阻力略低于Haitun-6,但是其摩擦阻力占總阻力的比值始終低于Haitun-6。
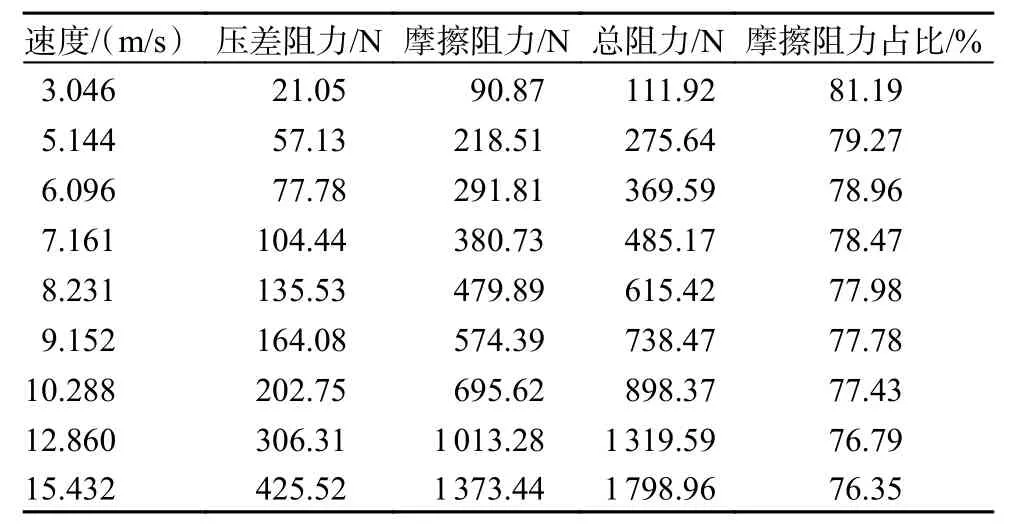
表6 Haitun-4 阻力計算結果
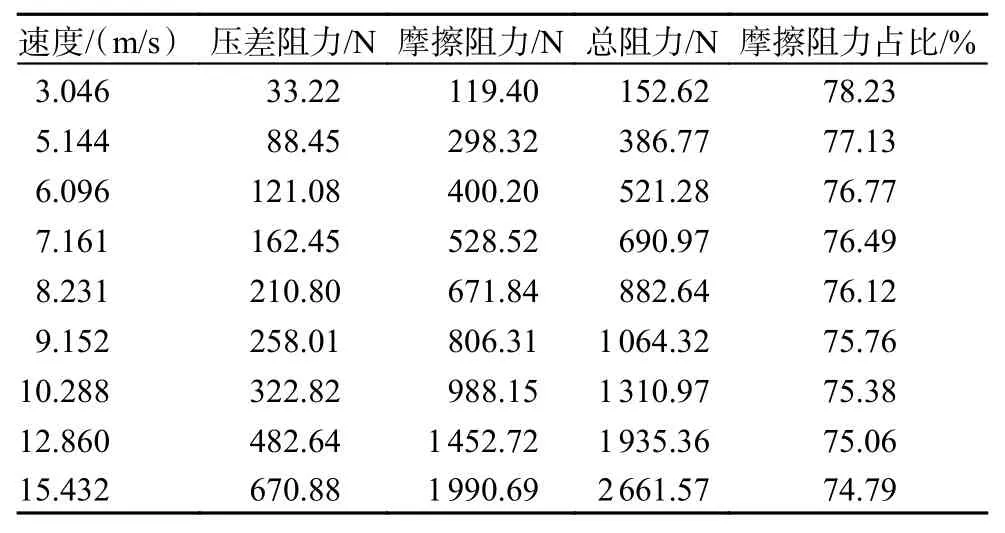
表7 Haitun-5 阻力計算結果
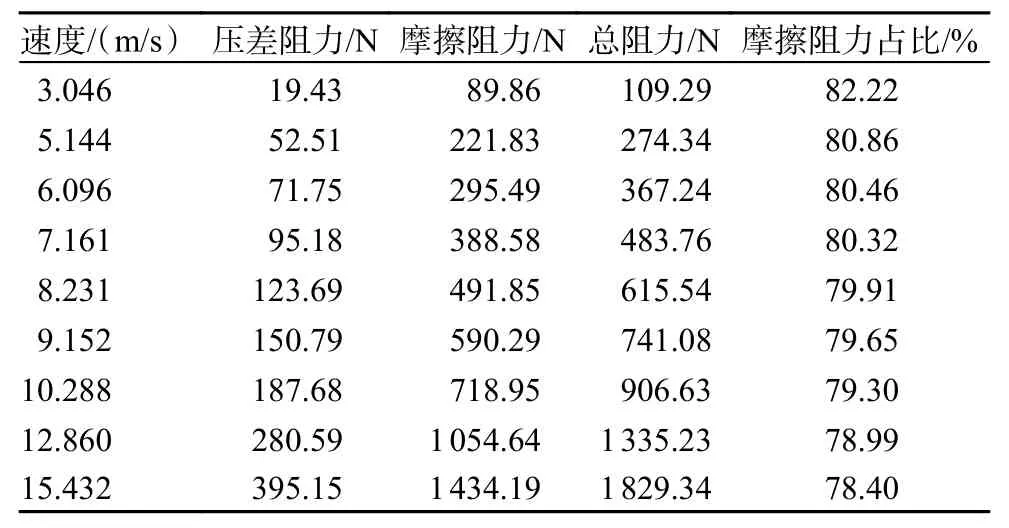
表8 Haitun-6 阻力計算結果
將 Haitun-4、 Haitun-5、 Haitun-6 的阻力和Haitun-3 的結果進行對比,采用Kr值作為評價阻力性能好壞的系數,Haitun-4 的排水重量為11 209.73 N,Haitun-5 的排水重量為17 188.61 N, Haitun-6 的排水重量為11 471.19 N。4 種模型的相關系數的對比見表9 和圖12。

圖12 Haitun-3、4、5、6 阻力特性對比
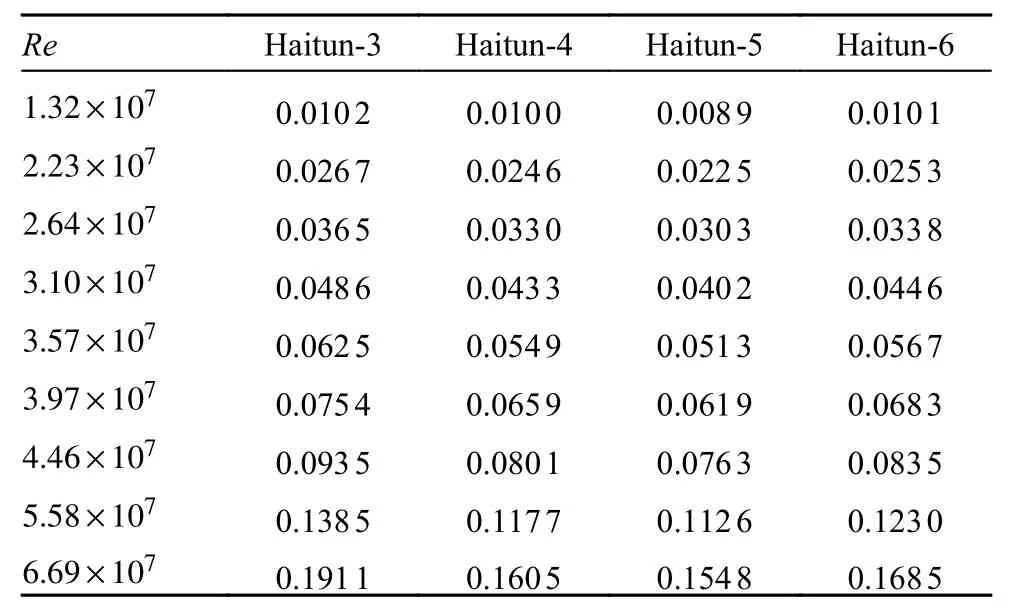
表9 Haitun-3、4、5、6 阻力特性對比
通過比較發現,Haitun-4、Haitun-5 和Haitun-6共3 個回轉體模型的阻力均要優于原始模型,其中Haitun-5 模型的阻力特性最好。圖13 是基于SUBOFF-2 模型各航速下的3 個優化模型的減阻效果百分比,其中Haitun-5 在9 個航速下的減阻效果均高于33%,在航速為15.432 m/s 時的減阻效果達到了將近40%。
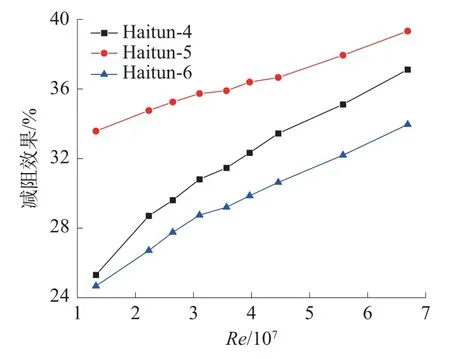
圖13 減阻效果
4 結論
對于高速UUV,其阻力性能的優劣對航速和續航能力的提升是至關重要的一方面。本文從仿生角度出發,針對水下無人航行器的減阻需求,模仿海豚和鯊魚2 種高速游動生物,設計了仿海豚模型和仿鯊魚模型,運用CFD 技術對其不同附體模型的阻力性能進行了預報和分析,得出如下結論:
1)對全附體SUBOFF 潛器的阻力計算結果,在速度為6.096 m/s 時,阻力計算值與試驗值誤差相差最大,為1.93%,6 個航速下的平均誤差為1.36%,驗證了CFD 技術在高速水下航行器水動力性能預報上適用性和準確性。
2)在研究不同水動力外形的阻力數值模擬中,在航速由3.046 m/s 增加到15.432 m/s 時,摩擦阻力占總阻力的比例減小的較為均勻,總體減小了3.42%~5.48%不等。
3)不同的附體情況,摩擦阻力和壓差阻力的比值是不同的,附體的存在會使總阻力快速地增加,對于仿生模型,去掉胸鰭引起的阻力變化量隨速度相對恒定,而去掉背鰭引起的阻力的變化量會隨速度的增加有一定的增加。
4)對于光體模型,Haitun-5 的Kr值最小,其在4 個光體模型中摩擦阻力占總阻力比值也是最大的,說明對于回轉體外形,不能一味地追求外形的細長,對于構成回轉體的曲線的曲率,或者說曲面的彎曲程度也對阻力有著顯著的影響。本文的Haitun-5 可為高速UUV 的外形設計提供參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19