第四代82 000 DWT散貨船錨泊設計
2024-02-26 10:56:18倪偉平曾巍陳瑩霞
船海工程 2024年1期
倪偉平,曾巍,陳瑩霞
(上海船舶研究設計院,上海 201203)
錨泊設計一般包括錨設備選型、錨設備布置與安裝、固定結構設計,需要綜合考慮系統內部關聯與外部條件等因素,錯綜復雜[1-2]。CB/Z280—2011《海船艏錨泊設計導則》(以下簡稱《導則》)可作為錨泊設計的指導文件[3],同時,還應根據船舶自身特點提供相匹配的錨泊設計。第四代82 000 DWT散貨船(以下簡稱本船)是上海船舶研究設計院最新設計的升級版卡爾薩姆型散貨船,在多家船廠獲得批量訂單。雖為批量建造船舶,入級不同船級社,但不同船東對錨泊設計提出不同要求,比如,一些船東提出按照大抓力錨配置取代斯貝克錨配置;一些船東要求在船舶橫傾2°時錨與船體間距至少為500 mm;一些船東提出船舶在橫傾5°時錨不得與船體碰撞;一些船東甚至增加了不利縱傾為1.5 m的要求。不論采用斯貝克錨還是大抓力錨,不論錨與船體定位如何,船廠更希望盡量減少對相關布置和固定結構的修改,以減少船體放樣工作量。介紹本船的錨泊設計過程,包括錨設備選型和錨設備布置,評估校核錨與船體相對位置,關注錨的收納與檢驗,為批量船建造提供相匹配的錨泊設計。
1 錨設備選型
錨設備選型時,錨和錨鏈應根據入級船級社相關章節要求和IACS REC. 10關于錨泊、系泊和拖帶的規則[4],按照基于船舶自身主尺度計算所得的舾裝數進行選擇;錨機應與錨鏈相匹配,并滿足可能航行的巴拿馬運河要求和蘇伊士運河要求來確定其運轉速度;掣鏈器和棄錨器應與錨鏈直徑相匹配,擎錨索型號則取決于錨的重量。
本船船長229 m,垂線間長225.5 m,船寬32.26 m,型深20.35 m,結構吃水14.5m,最輕載狀態下首部吃水約為4.95m,尾部吃水約為7.28 m。綜和上述尺寸及相關信息,確定舾裝數在3 600~3 800之間,錨泊設備配置見表1。
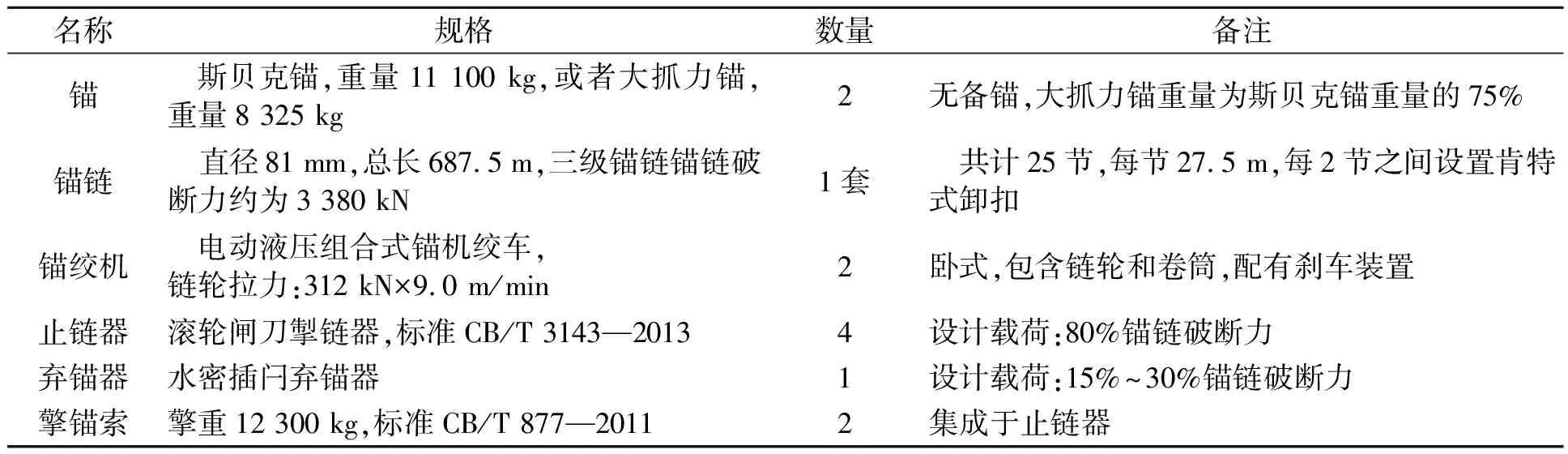
表1 錨泊設備配置信息
2 錨泊布置
2.1 錨泊布置原則
根據前三代82 000 DWT散貨船的設計經驗,具有肥大型船首的船舶不宜采用錨穴,錨鏈的長度決定錨鏈艙的最小艙容,錨鏈筒的布置和錨臺的結構形式決定錨的收納位置以及錨鏈與船體的相對位置,錨的形式決定錨唇的外形,錨泊布置受限于船體線型與甲板空間。
《導則》對錨泊布置原則有明確說明。
1)錨拉起收藏后一般要求盡量高于滿載水線2 m以上。
2)拋錨時,錨應能依靠自身的重量,毫無阻礙地從錨鏈筒拋出。
3)錨鏈筒在船體船體出口位置應盡可能避開船體分段焊縫。
4)起錨時,錨桿應能無障礙拉進錨鏈筒,且錨桿拉進錨鏈筒后錨爪應緊貼船體或錨唇或藏于錨穴中。
5)錨鏈筒的長度應能容納全部錨桿和部分錨鏈首端鏈環。
6)若無特殊要求,船體與錨的間隙(以錨的回轉半徑為衡量基準)要滿足船舶縱傾2%兩柱間長和橫傾1°錨收放時都不碰到船體,且在正態時船體與錨的間隙不小于300 mm,或僅正態時船體與錨的間隙不小于1 000 mm,取小者。
實際上錨泊布置的核心是為錨鏈和錨設計合理的收放路線,并在該路線上合理布置錨設備,綜合考慮船體特點和空間利用等要求。錨機、擎鏈器等設備布置于甲板面,需要一定空間,應盡量緊湊布置,為甲板面系泊操作留出充足空間。錨鏈較長,其基本單元鏈環尺寸相對較小,可視為線;錨作為錨鏈端部的幾何體,利用幾何元素進行描述;船體設計時借助水線、橫剖線表達其外型。基于上述簡化,通常利用二維視圖描述錨泊布置。
2.2 錨泊布置方案
本船采用直首線型,設有首樓,首樓甲板作為系泊操作區。參照上述設計原則,借鑒以往設計經驗,根據本型船首部線型特點,兼顧首樓甲板系泊設備等布置要求,以斯貝克錨為例確定初步錨泊布置方案(以右舷為例,左右舷對稱),見圖1。
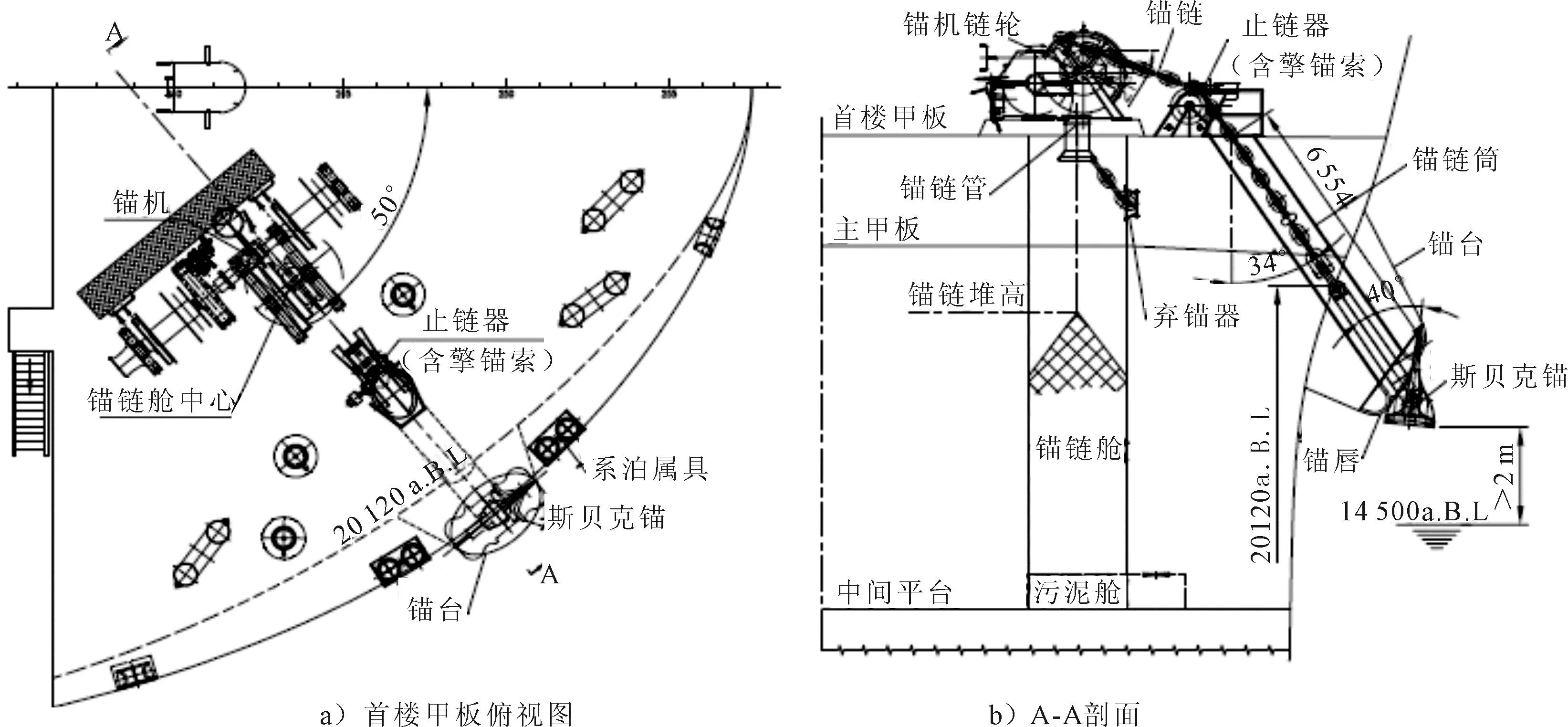
圖1 初步錨泊布置方案
錨絞機布置于首樓甲板后方,確定錨鏈路徑與船中的夾角為50°,確保正浮狀態下錨和錨鏈在下放時與船體外板近乎垂直,形成鏈輪中心線和和錨鏈筒中心線所在對稱面,即A-A剖面,并借助A-A剖面顯示錨鏈和錨的收納狀態。存儲于錨鏈艙內的錨鏈通過錨絞機鏈輪和擎鏈器后轉向進入開口于首樓甲板的錨鏈筒,并在其內部與錨相連,錨則貼合于錨鏈筒端部的錨唇表面,錨唇借助錨臺和錨鏈筒固定于船體。錨鏈筒上端起于首樓甲板面,向下傾斜穿過主甲板和船體外板與錨臺相連,錨鏈筒傾斜角度為56°(圖1顯示垂直夾角為34°),其中心線與船體交點距基線高度約為20.12 m,同時確定錨鏈筒、錨唇、錨臺相關尺寸,錨鏈筒長度約6 554 mm。圓形錨鏈艙從首樓甲板向下延伸至船體結構平臺,底部污泥艙,錨鏈艙直徑與深度可滿足錨鏈存儲要求。棄錨器位于錨鏈艙艙壁上約1 m處,方便人員在主甲板操作。
圖1所述的錨泊布置方案(方案一)中錨鏈筒和錨唇結構形式可以實現斯貝克錨的收納,但對于大抓力錨并不適用,原因在于斯貝克錨與大抓力錨構造完全不一樣。斯貝克錨的錨桿較長,錨爪形狀相對復雜;大抓力錨的錨桿通常粗短,錨爪形狀簡單;收納狀態下,斯貝克錨的錨爪和錨桿之間夾角為40°,大抓力錨的錨桿與錨爪之間夾角為35°。兩種錨結構對比見圖2。
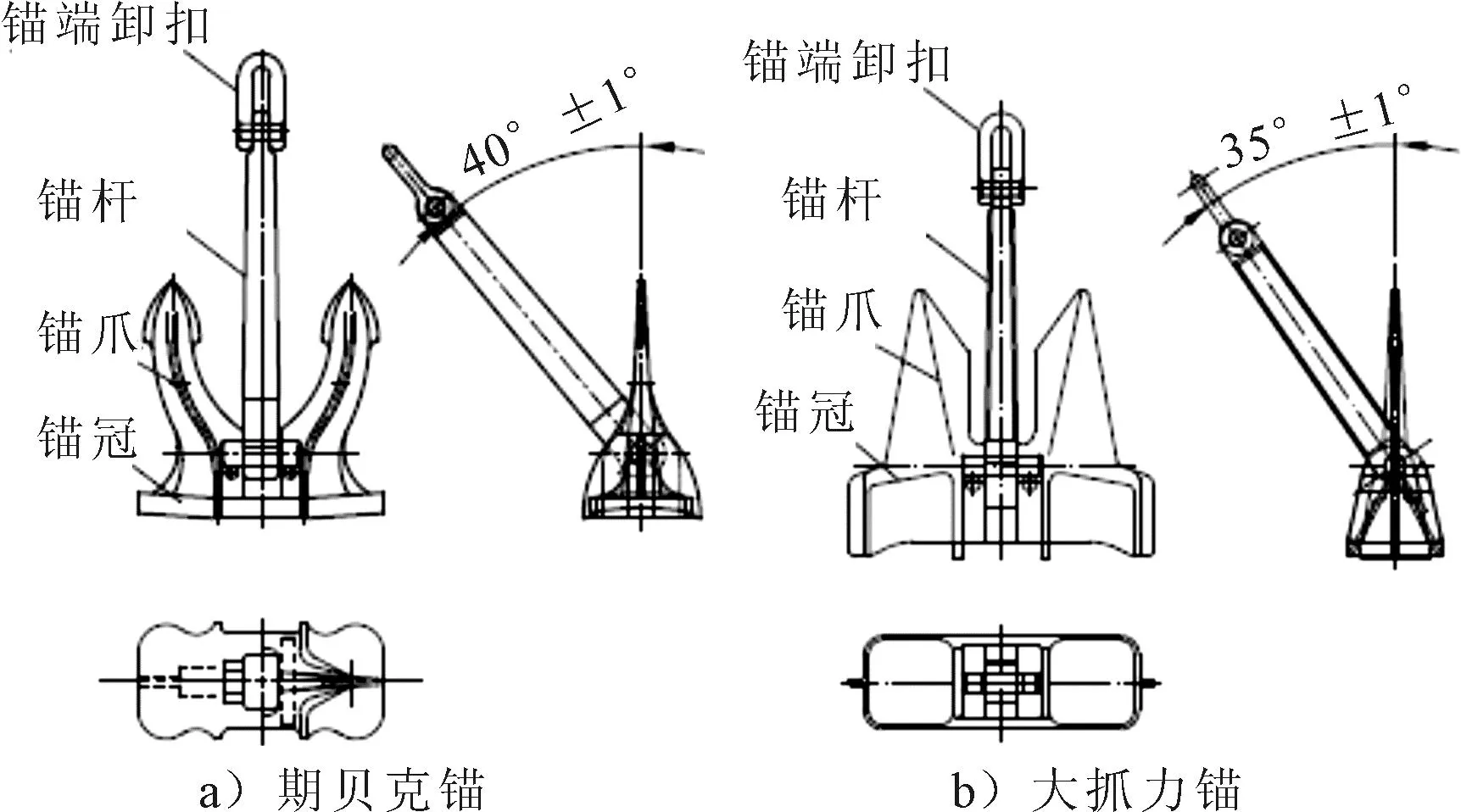
圖2 斯貝克錨與大抓力錨結構對比
本船配置大抓力錨時,需要根據大抓力錨的特點重新確定錨泊布置方案。為了減少改動,特別是對船體內部的改動,以方案一為基礎進行調整。錨鏈筒在船體內的部分保持不變,只在端部進行調整,針對大抓力錨的外形設置相應的錨唇錨臺結構,由此獲得相對應的錨泊布置方案(方案二),其A-A剖面見圖3。相對方案一,該方案中錨鏈筒在船體外的長度略有減小,錨唇和錨臺外形發生變化,錨唇與錨臺的分界面與錨鏈筒之間的角度變小,錨唇表面平面部分增大。此外還應根據錨桿和錨鏈的設置調整止鏈器的定位。
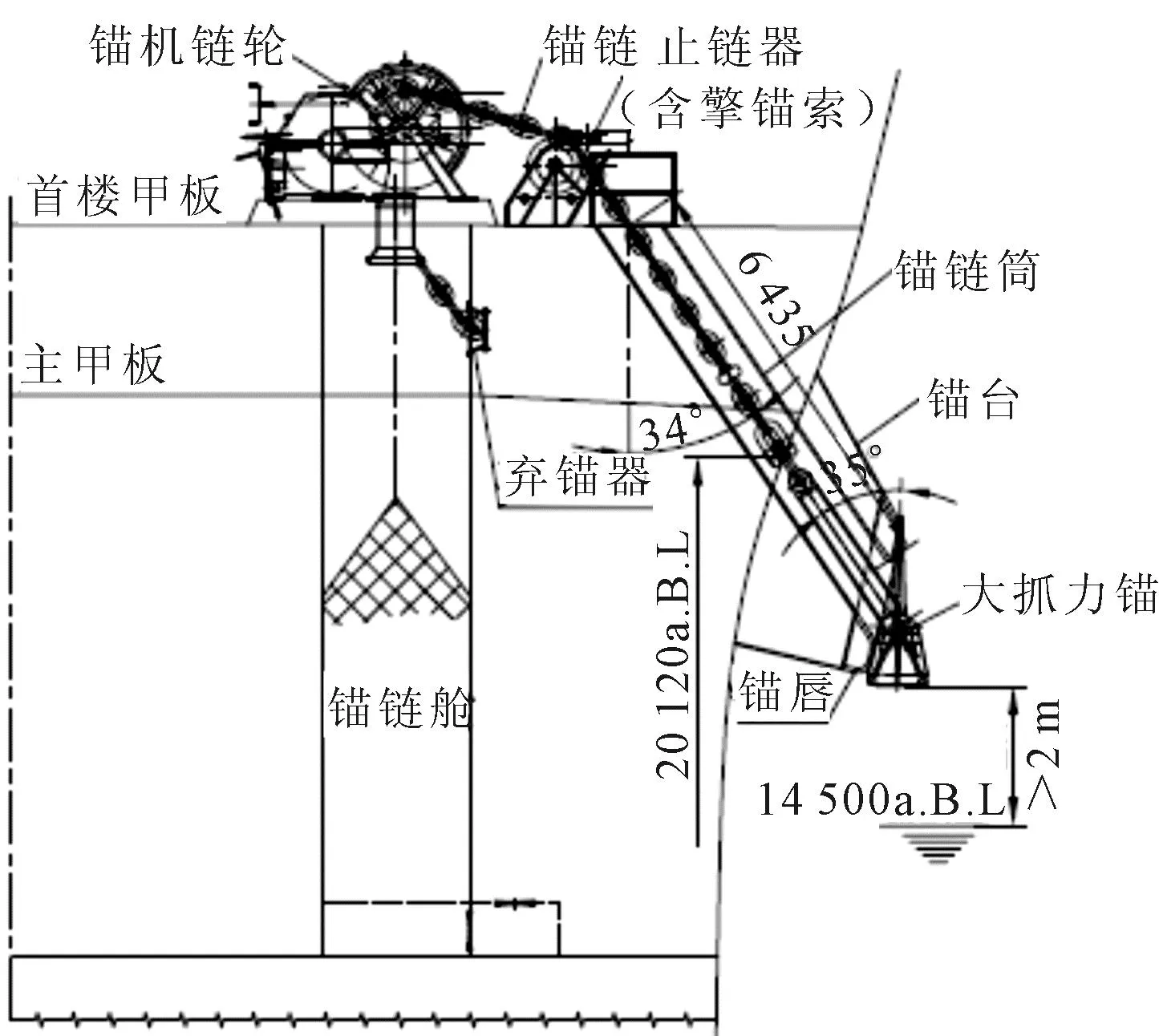
圖3 方案二A-A剖面
2.3 錨與船體間距核對
錨與船體之間的間距,船舶橫傾一般不大于5°,縱傾狀態可按照導則要求。利用相對運動原理,假定船體不動,把錨和錨鏈看做運動物體,同時沿用簡化手段將錨鏈看作直線,利用剖面線或水線表示船體,錨則借助最大回轉半徑這一參數,實際采用最大回轉圓周(以下簡稱回轉圓周)。回轉圓周中心隨上述直線變化而變動,可直接模擬錨與錨鏈的運動,回轉圓周與各剖面或水線之間的間距則可表示錨與船體的相對位置。
以方案一為例,借助A-A剖面,核對錨在下放過程中與船體的間距,見圖4。
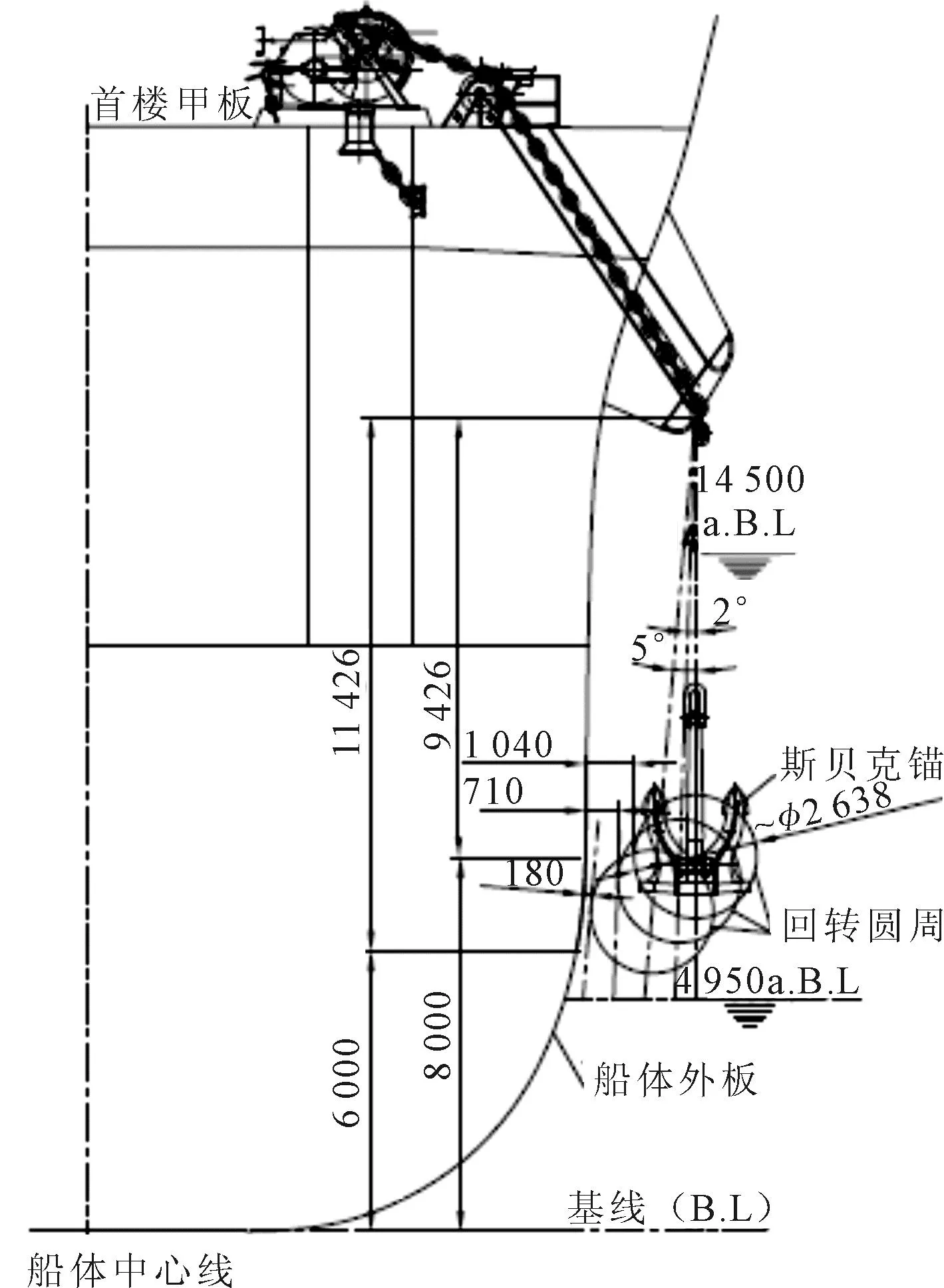
圖4 針對方案一的錨與外板間距示意
錨垂直下放時,與船體最小間距1 040 mm;當船體橫傾2°時,與船體最小間距752 mm;當船體橫傾5°時,與船體最小距離180 mm。當錨與船體外板間距最小時,錨距離基線高度在6~8 m之間,錨下放最小高度約為9.43 m,高于最輕載吃水。
A-A剖面并非錨下放時所在位置對應的橫剖面,但相較上述橫剖面更適合作為判定基準面,此時可借助不同水線說明,見圖5。
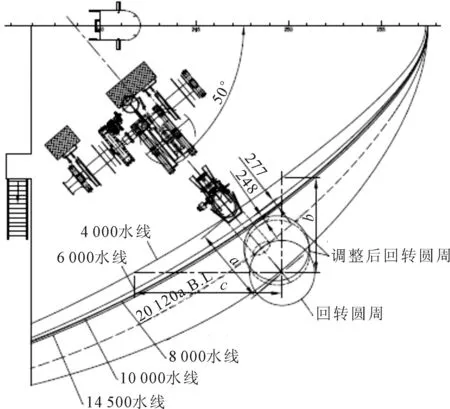
圖5 方案一錨與船體外板間距判定水平示意
假定錨在下放前其回轉中心與距離各水線間距約為a,該中心距離各水線的正橫間距為b,距離各水線的縱向為c,由于A-A剖面與各水線近乎垂直,可以判定a總小于b和c,因此A-A剖面處錨與船體外板的間距最小。當船舶首尾柱間長和最大水線長度相當時,如按照導則考慮船舶縱傾,根據幾何原理,確認錨因縱傾影響造成的縱向位移量最大不超過錨下落高度的2%,因而推算錨因橫傾造成的水平位移。錨下放高度為9.43 m時,錨距離基線8 m,船體以8 000水線表示,由船體縱傾引起的水平位移最大約為189 mm,橫傾5°時最大水平位移量約為825 mm,按照上述位移調整回轉圓周的定位,則回轉圓周與船體型線間距為248 mm,比A-A剖面顯示的最小間距略小。當錨下放高度為11.43 m時,錨距離基線6 m,船體以6 000水線表示,由船體縱傾引起的水平位移最大約為229 mm,橫傾5°時最大水平位移約為1 000 mm,按照上述位移調整回轉圓周的定位,則回轉圓周與船體型線間距為277 mm,同樣小于A-A剖面中顯示的最小間距。
經判定,圖1所示的錨泊布置方案滿足船東關于錨與船體相對位置的要求,高于導則要求。
同樣可借助三維手段進行判定,比如參照文獻[5]的方法建立以錨回轉圓周為基礎的圓柱面,模擬錨下放過程中的活動范圍,在船體三維模型中確定明確表達錨與船體最小間距的曲線。在此基礎上,根據要求調整船體三維模型的橫傾和縱傾狀態,判定圓柱與船體外板之間是否干涉即可確定錨在下放過程中是否與船體相碰。利用該方法核對方案二中錨是否與船體碰撞,假定設計條件為船體橫傾5°并伴有2%兩柱間長的縱傾狀態,見圖6。
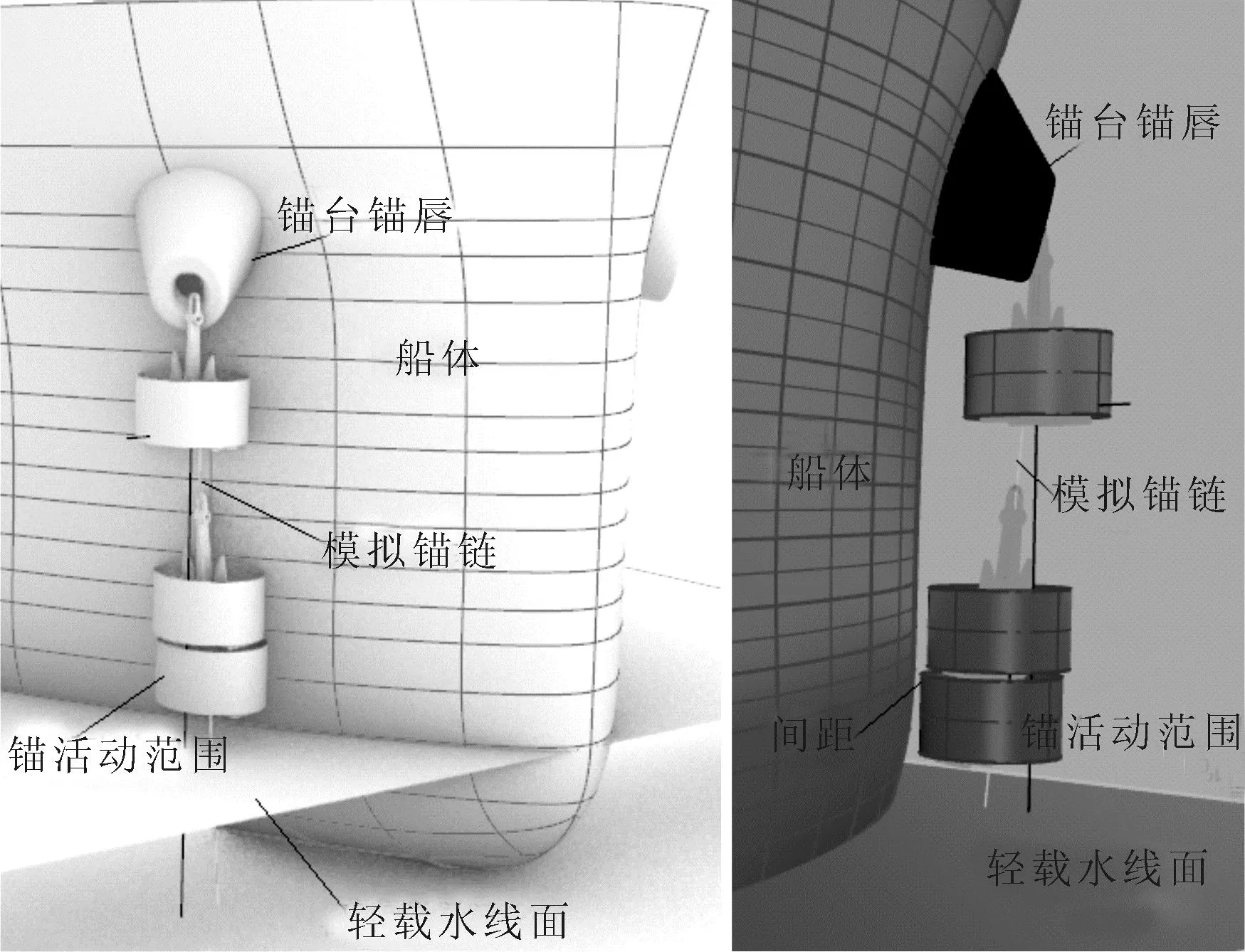
圖6 方案二錨與船體外板的相對位置示意
利用錨回轉圓周核對錨與船體間距的方法基于簡化手段和二維平面,方便快捷;建立船體和錨活動范圍圓柱,依賴完整的三維模型,相對復雜,但更加直觀。
2.4 錨的收納與檢驗
現有檢驗方法:①傳統的基于木質模型的拉錨試驗;②基于三維軟件的動態仿真[6-7]。
采用動態仿真對方案一進行檢驗,通過拉錨動畫,可以看出錨與錨唇的貼合情況,見圖7。

圖7 斯貝克錨動態仿真模擬
仿真模擬表明,錨桿在進入錨唇區域后繼續向上移動,直至完全進入錨鏈筒內,錨沿著錨唇表面繼續向上移動,錨爪最終貼合在錨唇上表面,錨冠貼合于錨唇下表面,錨桿收納于錨鏈管內部,錨和錨鏈中心線相對布置圖的中心位置要偏上。
利用傳統拉錨試驗對方案二進行檢驗,建立一定比例縮放錨唇、錨臺和錨鏈筒模型,利用人工拉動同等比例的錨鏈和錨進行運動,觀察收錨和拋錨的過程,見圖8。
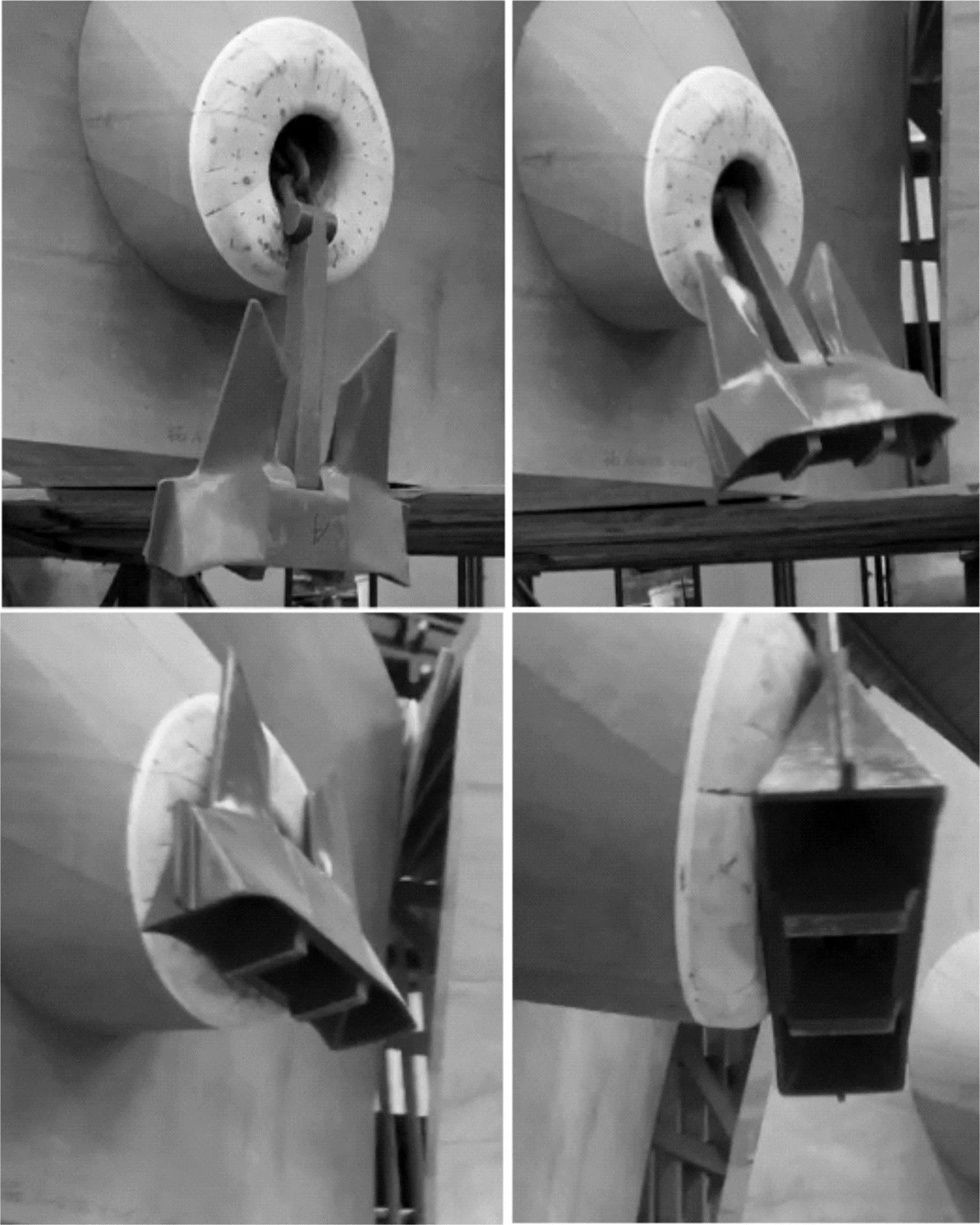
圖8 大抓力錨拉錨試驗信息
最終錨中心區域位于錨唇表面,錨鏈和錨桿相對布置圖的中心線位置偏高一點;拋錨時錨桿能夠順利脫離錨鏈筒端部,無卡錨現象。
檢驗表明,兩種布置方案滿足設計要求,可以保證錨的收納和順暢釋放;錨的最終收納位置比布置圖中定位要偏上,建議調整錨上部曲線,使錨唇上部提前對錨爪起到支撐限位作用,從而使理論布置與實際定位相吻合。
3 結論
錨泊設計屬于功能性設計,考慮因素較多,可依據導則進行設計的同時,還應根據船舶特點設置相匹配的錨泊設計方案。其中錨泊布置不是錨設備的簡單布置與安裝,而是錨設備之間的相互配合、錨設備對船體結構的高效利用和固定結構的設計與布置,為不同形式的錨和錨鏈提供合理的運動路線。
將錨、錨鏈和船體進行簡化,借助二維平面,利用錨回轉圓周核對錨與船體間距,是快速核對錨在拋錨和收錨過程中是否與船體相碰撞的重要方法。利用錨回轉圓周建立的圓柱面模擬錨運動范圍,通過判斷圓柱面與船體是否干涉確定錨與船體是否相碰撞,更加直觀。
建立錨、錨唇、錨鏈筒的三維模型,進行動態仿真或拉錨試驗都可對錨的收納和釋放進行檢驗,還可以間接輔助錨唇修改,實現理論布置和實際應用更好的有機結合。
猜你喜歡
山東冶金(2022年1期)2022-04-19 13:40:52
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
山東冶金(2019年1期)2019-03-30 01:34:56
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國房地產業(2016年2期)2016-03-01 01:25:29
工程建設與設計(2016年4期)2016-02-27 10:51:09
河南科技(2014年24期)2014-02-27 14:19:30