淺析探地雷達技術的發展歷程
2024-03-04 13:08:30姚振岸陳龍鳳王向騰李紅星陳振昊
江西科學 2024年1期
任 望,姚振岸,陳龍鳳,王向騰,李紅星,陳振昊
(東華理工大學地球物理與測控技術學院,330013,南昌)
0 引言
隨著我國經濟的不斷發展,工程建設和城市發展的需求日益增長,進而對于淺地表工程的勘探也有了不斷迫切的需求,比如城市道路和高速公路的危害檢測、城市地下管線的查找和定位、工程質量和建筑結構的質量檢測及礦產勘探和災害地質調查方面等。針對上述的淺地表工程勘探的項目需求,探地雷達技術作為一種有效且經濟的地球物理勘探技術能夠很好地解決上述的工程需求。
探地雷達(Ground Penetating Radar,簡稱GPR)是以地下介質的介電常數和電導率等物性參數差異為基礎,通過發射天線在地面發射高頻電磁波信號,信號在地下介質中進行一系列的傳播后被接收天線所接受,根據處理、分析與解釋所接收到的電磁波信號的振幅、波形、頻率等運動學和動力學特征來查明介質內部物性特征和分布規律,其原理示意圖如圖1所示[1]。與探空雷達不同,探地雷達使用的頻率較低,其主要研究是電磁波在介質中的傳播,由于地下介質的各向異性和不均勻性等,因此,探地雷達研究的復雜程度相較于探空雷達更加復雜。探地雷達技術是一門集高精度、高效率以及無損等眾多優點的地球物理勘探方法,但作為一種地球物理勘探方法,自身也是存在著一定的缺陷,限制探地雷達在各方面的應用,探地雷達的優越性和局限性詳見表1。因此,在對于探地雷達技術勘探的選取和應用時,要確保勘探要求和目標具有一定的針對性,而不是盲目選擇使用。自20世紀90年代末開始,我國開始重視探地雷達技術,并投入大量的研究。之后,隨著計算機技術和電子科學的飛速發展,探地雷達技術也逐漸趨向成熟,不僅在理論技術、儀器制造、實際應用和數據解釋等方面有重大的突破,而且其應用范圍也在不斷地擴大,如應用在地質、軍事、環境和工程等領域。
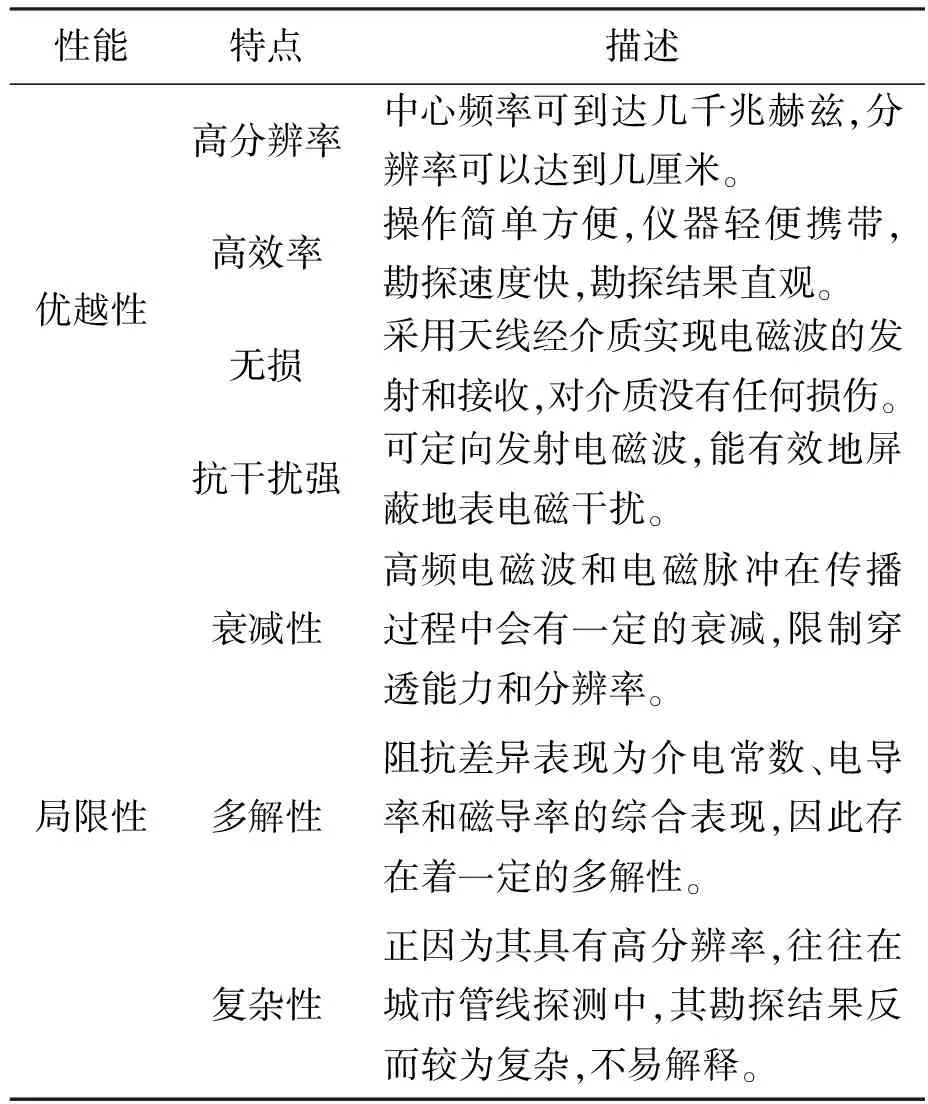
表1 探地雷達的性能
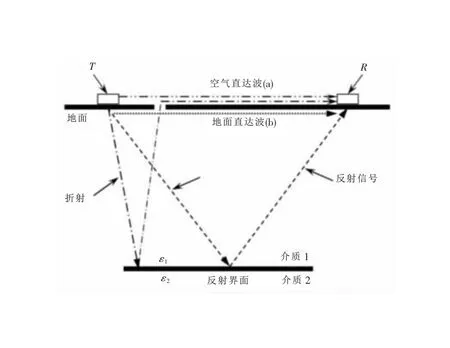
圖1 探地雷達原理示意圖[1]
1 探地雷達技術的發展
關于探地雷達技術領域的研究最先起步于國外,且在20世紀初就有相關的學者開始具體的研究。1904年,德國學者Hulsemeyer第一次利用電磁波信號來探測地下預埋的金屬物體的位置,這一項實驗也被后人認為是探地雷達的首次應用[2]。1910年,Gottheif Leiback和Heinrick Lowy首次使用連續的電磁波對地下預埋物體進行探測并正式提出了探地雷達技術的概念[3]。1926年,Hulsenbeck首次提出并使用電磁脈沖來對地下介質進行勘探,并得出電磁波在介電常數變化的界面會很容易產生反射這一理論[4]。1929年,德國物理學家Sterm首次利用電磁脈沖進行冰川厚度的探測研究,雖然勘探結果不盡人意,但卻為后面的地層厚度探測工作提供了實驗基礎[5]。1937年,Melton提出的脈沖雷達系統標志著探地雷達技術的系統化發展。在之后的二十年時間里,探地雷達的實際應用發展卻很慢[3],其主要原因是地下介質情況較為復雜,電磁波在介質中傳播時有很大的衰減,也限制了電磁波的穿透能力,并且當時使用的設備也較為落后。直到20世紀60年代左右,探地雷達技術重新被學者和研究家們重視起來,并投入大量的時間和精力致力于探地雷達的研究工作中。1960年, Cook研究員使用脈沖雷達在礦井中做勘探實驗并取得了不錯的解釋成果,也因此研發一套較為完整的探地雷達系統[4]。1968年,MIT專門為軍隊研發了一套可用于檢測地下坑道的雷達系統,在后來的使用中也受到了軍隊的青睞[5]。1978年,Unterberger等也嘗試將探地雷達技術應用在介質鹽層的探測中。之后,隨著計算機技術水平的不斷提高和對探地雷達技術的大量研究,探地雷達技術有了突飛猛進的發展,同時這一時期也涌現出一大批探地雷達設備研發制造公司。21世紀初,隨著數字化探地雷達系統的研發成功,解決了探測數據存儲難題,加快了數據處理速度,提高了工作效率,因此,探地雷達技術也開始應用在各行各業中,如工程地質探測、地下礦產資源探測、考古檢測、水文探測、道路以及城市管線探測領域。Chan等[6]使用探地雷達對淺水層下目標的識別,勘探結果表明有著良好的識別能力。 Young等[7]使用探地雷達技術成功地識別地下的金屬管線和非金屬管線并確定其位置和管徑等。
相對于國外來說,我國對于探地雷達技術的研究起步較晚,開始于1980年,研究初期主要是依靠從國外引進或買入的探地雷達設備。1985年,鐵道部引進一臺SIR-8型探地雷達和市政部引進一臺SIR-3型探地雷達,并進行相關的實驗研究工作[8]。1990年,中國地質大學首次引進加拿大公司的EKKO-IV型探地雷達并用于一系列的研究中,這也為我國的探地雷達技術積累了寶貴的經驗[8]。國內的研究探地雷達技術的主要地方是各個省的高校和研究所,如中國地質大學、東南大學、北京遙感設備研究所等。1993年,方廣有等[9]研究了探地雷達脈沖在土壤中傳播時的失真特性,并指出了引起該特性的原因和如何恢復原波形的方法。1998年,徐興新等[10]將探地雷達技術應用在堤壩隱患探測中,其應用結果表明,該技術能夠很好地查明堤壩中的多種隱患(如洞穴、裂隙和蟻巢)的位置和規模,且還將該技術推廣于探測庫底土工膜和蓄水區塌陷位置。2002年,劉敦文等[11]將探地雷達技術應用在古墓完整性的探測中,其探測結果表明,該技術能夠較準確地查明古墓的地下形態、結構與規模情況并得出土層速度的不均勻性有時會影響結果精度的結論。2015年,劉瀾波等[12]詳談了探地雷達在幾個基礎地學與工程技術鄰域中的應用、評述了探地雷達技術的變異形式(如鉆孔雷達、探月雷達)并強調了該技術是淺地表地球物理科學的重要工具。2022年,曾雄鷹等[13]提出一種基于雙主頻高動態探地雷達檢測系統并應用于道路病害檢測中,該雙主頻檢測系統兼顧了探測深度和縱向分辨率,能夠很好地識別地下病害類型、位置、埋深及影響范圍。
2 探地雷達正演的發展
探地雷達的正演模擬技術是指在給定初始條件和邊界條件下求解方程的問題,即給定介質模型和相關物理參數條件下,研究探地雷達系統發射的波在介質模型中的傳播規律并計算在地面所接收到的電磁場信號的一種技術。正演模擬技術能夠獲得地下介質中異常體在地表的反射波形態,能夠從實測剖面上觀察出異常區域,進而進行實測數據的處理和解釋,因此,正演模擬技術是探地雷達的核心內容。
探地雷達的正演模擬方法主要分為射線追蹤法和波動方程法。射線追蹤法[14]是把電磁波波動理論簡單化為放射線理論,其原理是雷達波發射的運動學基礎理論。這種方法有著運算方便、適應性強、計算速度快等優點,能夠直觀反映電磁波的幾何傳播路徑的優點,但由于缺少雷達波相關的動力學信息,無法體現出電磁波的運動學特征。因此,現如今占據主流的正演模擬方法是波動方程法。波動方程法[15]以電磁波的運動學特征為基礎,運用數學上比較完善的理論方法來解決雷達波的微分方程。波動微分方程的運算中通常會包含比較多的波動性變化信號與波場介質參數,可為模型的求解和處理提供了良好的憑證,使得波動性微分方程正演仿真方式在探地雷達正演仿真中具有絕對的主導地位。然而,波動方程法中最為廣泛使用的2種方法為有限差分法和有限單元法。
時域有限差分法(Finite Diffience Time Domain,簡稱FDTD)是探地雷達正演模擬最原始的數值計算方法,其基本原理[9]是通過麥克斯韋方程組,利用二階和高階的差分方程近似將旋度方程中的微分格式全部轉換為差分格式,再根據經過轉換后的邊界條件方程和初值條件方程,從而能夠對連續的電磁場的方程進行離散求解。YEE[16]在其所撰寫的《各向同性介質中麥克斯韋方程組初邊值問題的數值解》論文中指出利用YEE氏網格的空間離散,將麥克斯韋方程組轉變成了有限差分的格式,自時域有限差分法被提出后,該技術便在探地雷達正演模擬中獲得了普遍的運用。1975年,Taflove等[17]使用瞬態麥克斯韋方程組求解穩態電磁散射問題。1981年,Mur[18]提出Mur吸收邊界從而能夠解決使用有限差分技術求解電磁場方程時有角所引起的場奇異性問題。1990年,Luebbers等[19]提出一種與高度分散材料(如雪、冰、等離子體等)頻率相關的時域有限差分公式。2006年,劉四新等[20]提出一種全新的時間域有限差分算法,該算法能夠計算出介電常數并且隨頻率變化滿足Debye關系的頻散介質中麥克斯韋方程。2009年,馮德山等[21]提出了一種探地雷達時域多分辨正演模擬方法,并推導了三維DB2-MRTD法的差分方程,并且還設計出小波域探地雷達三維偏移處理算法。2009年,吳豐收等[22]應用高階時域有限差分法時,使用各向異性完全匹配層作為吸收邊界條件,在處理不同復雜介質中分布的信號上,可以很好地表現信號的細微變化。
有限單元法(Finite Element Method,簡稱FEM),其基礎是變分原理和加權余量法,其基本求解思想是把計算域劃分為有限個不規則單元,在每個單元內,選擇單元上的節點作為插值點,將微分方程中的方程式改寫成由各節點值和插值函數組成的表達式,最后對該表達式進行求解。有限單元法最初是應用在固體地球學領域中,但隨著正演技術的進一步研究發展,部分學者開始嘗試把有限單元法運用到地球物理學中,并首先運用在地震波相關的正演模擬領域。1982年,杜世通[23]首次使用有限單元法來處理不均勻介質的波動方程并取得了較為準確的數值解,同時還提出了一維和二維波動方程有限元數值解法數學原理。由于雷達波與地震波傳播原理較為相似,所以較少數學者也開始試著將有限單元法應用于探地雷達的正演模擬中。1994年,沈飆等[24]根據雷達波波動方程與地震波波動方程的一致性,首次將地震波正演處理方法應用到探地雷達中,并取得了不錯的正演結果,為探地雷達有限單元法正演技術奠定了一定的理論基礎。2001年,Faning和boothby[25]在利用探地雷達技術對拱橋進行檢測時,使用了三維有限單元法正演技術并取得了較好的檢測結果。1999年,底青云等[26]使用麥克斯韋方程組的同時考慮到了其衰減項,對大量的復雜地電模型進行有限單元法正演模擬。2003年,謝輝等[27]使用二十節點等參數單元對實體模型進行三維有限元計算并且還依此建立了電磁波全反射傳播的正演模型。2011年,陳承申[28]根據麥克斯韋方程組,詳細推導了探地雷達的有限元波動方程并介紹了探地雷達二維有限元波動方程數值解的方法原理。
3 探地雷達反演的發展
探地雷達反演是指根據所測得的雷達數據,用相關的數學方法進行推算地下介質物性參數以及建立介質模型。目前,我國在探地雷達領域的反演方法主要分為基于射線的層析反演和基于波動方程的全波形反演2種,且2種方法理論技術均為不成熟。
1980年,Dines等首次將計算機斷層掃描技術應用到地球物理勘探領域并提出了層析成像這一概念,這也為今后的探地雷達反演技術提供了一定的理論基礎。Mangué[29]等提出一種基于探地雷達首波的旅行時間的井間層析成像反演的新方法,該方法考慮了地質結構,并能依靠較少的物性參數進行反演,對地下介質中的界面位置和傾角等有著較好的識別效果。2013年,杜翠等[30]提出運用探地雷達層析成像技術進行復墾土壤的層次檢測,并構建了介質波速模型,其研究結果表明,反演的準確率較高,使用效果較好。2014年,楊峰等[31]建立一個典型的金屬礦區速度模型,并在有代表性的切片上使用層析成像算法進行反演計算,其反演結果表明,誤差控制在1%之內。近年來,隨著工程建設的需要和各種反演方法的不斷改進和完善,層析成像反演技術應用的場地較為多樣性,并且能夠具有解決實際工程問題的能力。
反演問題分為線性反演問題和非線性反演問題,前者在解決問題中困難較少易解決,而后者在解決問題中較為復雜難解。一般的復雜地質反演問題均屬于非線性反演問題,因此,為了在解題中減少問題的出現和復雜度,一般會將該類問題做近似線性化處理。早期的線性近似方法有Born法和Rytow法[32]。2004年,Cui等[33]提出當介質特性相差較大時,利用Born近似法進行求解較為困難甚至完全不能解決。2015年,Backus等[34]提出一種逐步線性化的方法,形成較完善的BG反演理論。同年,Métivier等[35]提出一種將Born遷移算子設計用于求解線性化逆問題的漸近算子與全波形反演相結合的算法。將非線性化問題做近似線性化處理雖然能夠降低難度和減少運算量但卻不能夠滿足高精度要求。為了處理更加復雜的地質環境和滿足高精度工程要求,許多學者不得不開始著手研究非線性反演方法。2015年,雷林林等[36]使用時間域全波形反演算法對地下相對介電常數進行反演,并將反演后的地下相對介電常數模型作為逆時偏移成像的初始速度模型。2017年,Guan等[37]利用基于遺傳算法的雷達數據進行全波形反演進而對石灰巖的進水情況進行檢測并取得不錯的結果。2019年,張崇民等[38]將全波形反演技術應用到隧道施工領域中,對不良地質體建立數值模型和反演運算,最后也取得了不錯的效果。
4 人工智能應用探地雷達技術的發展
人工智能(Artificial Intellgence,簡稱AI)是用于模擬和延展人類智能的理論與思維的一門新的技術科學。人工智能的主要功能是通過研究人類的活動規律和思維變化,使得該系統具有一定仿人的能力,通俗的講就是研究如何讓計算機去完成以往需要人的智力才能勝任的工作。1956年,麥卡賽和明斯基等眾多科學家共同研究如何用機器來模擬人類智能的一系列相關問題,并首次提出人工智能這一概念。在此之后,人工智能技術領域取得了突飛猛進的發展,也廣泛地應用于各個學科領域。隨著計算機的發明,計算機也逐漸被科學家變成來模仿人類思維的工具。
隨著人工智能的興起,一些地球物理專家開始試著將此項技術應用到地球物理中,看是否能夠促進物探方法的發展以及解決一些人為無法求解的難題等。21世紀初左右,國內外的學者開始將人工智能應用在探地雷達領域中,主要是解決一些道路檢測和雷達數據圖像識別問題等。2000年,王群等[39]利用Welch功率譜來提取探地雷達所獲取的目標信號特征,并將該特征用于訓練LVQ神經網絡,成功地實現了對探測目標的分類且還能達到實時處理數據的能力。2004年,劉敦文等[40]提出了一種用于隧道探地雷達信號解釋的BP神經網絡模型和算法,在對隧道襯砌厚度進行實際探測后,結果表明該方法有著較高的工作效率和解釋精度。2007年,希臘Loizos等將人工神經網絡技術應用在瀝青混凝土剛度的評價中,有著良好的效果[41]。2009年,意大利Caorsi等[42]將人工神經網絡應用在道路災害探地雷達檢測診斷中,根據解釋成果對異常區進行實地深挖檢查,最后表明正確率較高。同年,我國鄒華勝等[43]應用支持向量機方法,通過建立向量機回歸模型和計算研究,實現了對油田儲層厚度的預測和計算。2010年,杜攀峰等[44]提取各種鐵路路基病害的特征,通過學習向量化神經網絡模型來識別路基的各種病害類型。2012年,甘建強等[45]將改進后的BP神經網絡應用到探地雷達圖像識別技術中,其結果表明BP神經網絡能高效且準確地自動識別雷達圖像里的異常圖像。同年,胡浩幫等[46]將Faster R-CNN算法應用在探地雷達對管線的智能識別中,其結果表明該算法較傳統圖像識別方法有著抗干擾能力強,運行效率高等優點。2013年,法國Bastard等[47]將支持向量機應用在探測地面厚度的應用中。同年,南昌大學項雷[48]也實現了支持向量機應用在公路檢測探地雷達圖像的自動識別。以及周輝林等[49]也應用支持向量機到自動檢測高速路基的病害中且檢測的結果正確率達到了92.7%。2014年,上官鵬程等應用人工神經網絡到提取瀝青路面密度中,其結果數據表明該方法具有實用和高效性[50]。2015年,美國E.Besaw等[51]率先使用深度卷積神經網絡(CNN)來提取和分類探地雷達B掃描中包含的復雜特征。2016年,Li等[52]將隨機霍夫變換算法(RHT)在不同中心頻率下應用在雷達剖面中樹根的識別中,實驗結果表明準確識別率達到了80%。2017年,鄭晶等[53]提出一種探地雷達圖像分割方法并詳細介紹了該方法實現的步驟。這種方法是利用聚類思路將雷達圖像進行分割,放大異常圖像區,舍棄正常的圖像且無需大量的訓練數據,便能實現精確提取目標。2019年,Lei等[54]將Faster R-CNN算法應用于灰色GPR-B掃描圖像中識別雙曲線特征,然后將提取檢測到的區域轉換為二值圖像,根據提出一種新的雙聚類搜索估計算法(DCSE)將目標點相互分離,進而實現雙曲線特征的識別。同年,Kang等[55]開發一種基于追蹤的背景過濾算法并建立深度卷積神經網絡,然后將其應用在三維探地雷達數據的自動分類地下物體中,并且還能實現快速和全自動的數據解釋。2020年,Lei等[56]提出自適應目標區域檢測算法(ATRD)和卷積神經網絡長短時記憶框架(CNN-LSTM),并將ATRD應用于從包含雙曲線特征的B掃描中提取區域,將CNN和LSTM網絡結合起來提取雙曲線區域特征從而達到地下圓柱物體檢測以及直徑識別。
5 總結與展望
目前,國產探地雷達系統產品均有著良好的用戶使用反饋,且該產品也能夠滿足絕大部分的工程需求和實驗精度要求。但相比較于國外的儀器產品,仍存在著一定的差距。在面對一些高難度和高精度需求的工程和實驗上,用戶所使用的儀器大部分還是進口產品,如SIR系列、MK系列等,但同時也會帶來價格昂貴和售后不易等難題。綜上所述,國產探地雷達系統的前景還是非常廣闊的,但仍需要大量的研究、實驗和應用使得該產品向著更智能、更簡便、更高精度、更高性價比的方向發展。
目前,探地雷達的正演模擬技術得到了許多學者的廣泛關注,時域有限差分法和有限元法2種正演模擬方法在實際應用中均有著各自的優缺點。時域有限差分法在目前算是使用率最高、理論技術最為成熟的正演技術,但由于采用較為規則的網格單元,不能很好地模擬復雜的結構。然而有限單元法能夠采用非結構化網格剖分,對一些復雜的結構進行正演模擬,但該方法所生成的系數矩陣和稀疏方程組的求解較復雜且量多。所以,在未來為了滿足高精度和高效率的條件,可以將各種正演模擬方法優缺點互補,開展一系列的混合算法進行探地雷達的正演模擬,這也將會是未來探地雷達的正演模擬技術的發展與主攻方向。
同時,探地雷達的反演模擬技術也同樣備受關注。探地雷達層析成像技術的橫縱向分辨率較高,但其誤差會隨著速度結構的復雜程度而增大,特別是遇到一些較為不好的界面如陡峭界面時,其反演的結果受干擾較大從而導致精度的差異。全波形反演算法有著精度較高的優點,但因其算法終究還是非線性算法,其反演的結果是不穩定的,在實際應用中表現還欠佳。總之,在探地雷達的反演領域中,還需要不斷地提出、改進和聯合反演算法使得反演結果有著更高的精度、更快的效率和更好的穩定性。
從人工智能應用于探地雷達技術的研究進展中可以看出,在探地雷達領域內已經開始伴隨著人工智能和機器學習的摻入,大部分的應用研究目標領域是能夠自主對雷達圖像進行分析并找到異常區域以及自主分類,并作進一步的解釋以及對地下目標體的大小、位置和形狀進行測量與分析。目前,已有大量的關于人工智能與探地雷達相關結合的研究,研究階段也從“人能做、AI能做,但AI沒有人做的好”的階段開始向“人能做,AI能做,AI做得比人好”的階段飛速發展,但其研究的最終階段是“人做不到,但AI能做”的階段。因此,前方仍然需要更多的專業研究學者和技術專家的不懈努力,使得探地雷達系統在有了人工智能的加入后,不僅是能夠對雷達圖像進行自主分析,而且是拓展到探地雷達技術的各個方面。
從上述篇幅的論述中可以知道,探地雷達的各方面技術已經逐漸趨向于成熟,技術研究、數據的處理和解釋等方面也在不斷地進步,應用的領域也在不斷地擴大。隨著探地雷達的影響不斷增加,各國的研究學者也將會把目光聚焦在探地雷達技術領域的未來發展研究中,不斷地更新和研發技術,但同時也會將面臨更大的難題和挑戰。