考慮高斯能量分布的復(fù)雜表面航天器激光雷達(dá)散射特性分析
2024-03-08 02:52:32程勛龍康國華邱鈺桓武俊峰吳佳奇尹一蓁
上海航天 2024年1期
關(guān)鍵詞:模型
程勛龍,康國華,邱鈺桓,武俊峰,吳佳奇,尹一蓁
(南京航空航天大學(xué) 航天學(xué)院,江蘇 南京 211101)
0 引言
激光雷達(dá)(Light Detection and Ranging,Lidar)因其波束窄,抗干擾能力強(qiáng)[1]等優(yōu)點(diǎn)被應(yīng)用于空間非合作目標(biāo)的識(shí)別和預(yù)警[2-3]。通過對(duì)區(qū)域內(nèi)目標(biāo)跟蹤、搜索以及測(cè)量,激光雷達(dá)可實(shí)時(shí)獲取航天器目標(biāo)的三維點(diǎn)云信息[4],尤其是在無光照條件下,激光雷達(dá)依然可以工作[5-6],因此成為當(dāng)前空間安全防御的主要威脅。針對(duì)激光雷達(dá)建立激光雷達(dá)散射特性模型,將對(duì)后續(xù)航天器的激光雷達(dá)隱身性能評(píng)估起到重要作用。
對(duì)于目標(biāo)激光雷達(dá)散射特性的研究,哈爾濱工業(yè)大學(xué)李程程[7]通過電磁散射解析理論分析不同入射波長激光、目標(biāo)表面粗糙度對(duì)激光散射特性的影響,在此基礎(chǔ)上建立三維目標(biāo)的激光雷達(dá)截面(Laser Radar Cross Section,LRCS)計(jì)算方法,雖然此方法分析了不同粗糙度材質(zhì)的特性,但是其光束模型采用了能量分布均勻的點(diǎn)光源與實(shí)際情況存在一定差異。
宮彥軍等[8]采用差異積分法克服統(tǒng)一積分法中存在的舍掉誤差,分析了觀測(cè)方向的方位角和天頂角對(duì)LRCS 的影響,以及三錐體的幾何參數(shù)對(duì)后向LRCS的影響,但是其在計(jì)算朗伯三錐體的LRCS 時(shí)缺少對(duì)于多材質(zhì)復(fù)雜表面情況的分析。西安電子科技大學(xué)徐付昌[9]基于GRECO 算法,實(shí)現(xiàn)了不同光斑下的復(fù)雜目標(biāo)單、雙站的LRCS 計(jì)算,同時(shí)還考慮了局部照射下光斑無法完全覆蓋的情況。張昊等[10]提出了一種圖形電磁計(jì)算方法(Graphical Electromagnetic Computing,GRECO)以及雙向反射分布函數(shù)(Bidirectional Reflectance Distribution Function,BRDF)模型的復(fù)雜目標(biāo)LRCS 計(jì)算軟件的一體化開發(fā)方法,實(shí)現(xiàn)了對(duì)復(fù)雜目標(biāo)的LRCS 快速求解。李良超[11]提出了計(jì)算覆蓋多種材料復(fù)雜表面的激光雷達(dá)散射特性可視化方法,使用顏色標(biāo)簽建立含材料信息的目標(biāo)模型,并且通過OPENGL 消隱解決遮擋問題。孫鵬舉等[12]在一般計(jì)算方法的基礎(chǔ)上,重點(diǎn)針對(duì)鏡面反射目標(biāo),提出了一種簡便的LRCS 工程估算方法,并應(yīng)用于激光角反射器目標(biāo)和“貓眼”目標(biāo),獲得相應(yīng)的LRCS估算公式。JIN 等[13]提出了一種快速可視化的LRCS求解辦法,其利用顏色標(biāo)簽包含材料信息,并利用五參數(shù)經(jīng)驗(yàn)?zāi)P涂焖偾蠼饽繕?biāo)LRCS。西安電子科技大學(xué)楊昭[14]通過蒙特卡洛光線追跡算法計(jì)算目標(biāo)在激光波段的LRCS 散射特性,分析了二次散射對(duì)計(jì)算結(jié)果的影響。上述文獻(xiàn)雖然實(shí)現(xiàn)了復(fù)雜目標(biāo)的LRCS 求解,但是都忽視了激光高斯能量分布特性,會(huì)導(dǎo)致實(shí)驗(yàn)結(jié)果與理論值存在一定的誤差。
針對(duì)上述情況,曲衛(wèi)東[15]分析了光斑模式為高斯能量分布與均勻分布之間存在的誤差,并且提出將消光布遮蔽法與光斑分析法相結(jié)合,以提高LRCS 測(cè)量精度。西安電子科技大學(xué)羅龍[16]研究了均勻照射情況與非均勻高斯光束照射的差異,并提出補(bǔ)償參數(shù)R 的概念,及其與目標(biāo)形狀尺寸的關(guān)系;但是其研究目標(biāo)為簡單幾何體,并未對(duì)復(fù)雜表面目標(biāo)進(jìn)行分析。王明軍等[17]分析了激光光束的高斯能量分布特性,并研究了在波長1.06 μm 激光束入射下,粗糙球體目標(biāo)散射場(chǎng)量的二階統(tǒng)計(jì)特征。上述工作都考慮了激光的高斯能量分布特性對(duì)于激光雷達(dá)散射特性產(chǎn)生的影響,但都是針對(duì)簡單表面目標(biāo)進(jìn)行分析。
綜上所述,以往對(duì)于激光雷達(dá)的目標(biāo)散射特性分析通常采用簡單可見光模型求解,未充分考慮激光特性;并且對(duì)于非連續(xù)、多材質(zhì)表面的影響也未考慮充分,因此建模往往不夠準(zhǔn)確,散射特性分析和實(shí)測(cè)相差較大。本文基于激光特性和復(fù)雜航天器表面精確模型,提出一套更接近真實(shí)情況的LRCS 仿真算法,以期為航天器激光隱身的設(shè)計(jì)分析提供一個(gè)更為準(zhǔn)確的路徑。
1 考慮高斯能量分布的激光雷達(dá)光束模型
在以往激光雷達(dá)散射特性建模分析中,將光束能量分布近似為均勻分布,如圖1(a)所示,把其能量特性類似于可見光;然而激光雷達(dá)光束的強(qiáng)度在截面上的分布呈現(xiàn)高斯分布[18],其能量分布如圖1(b)所示;因此等效成均勻能量分布最后會(huì)使計(jì)算結(jié)果不夠精確。同時(shí)對(duì)比兩者可以看出高斯能量分布的分布趨勢(shì)主要為中間較高,并且逐漸向四周遞減,而均勻分布則在同一截面上各點(diǎn)能量大小相同。

圖1 均勻能量分布、高斯能量分布及Lidar 坐標(biāo)系Fig.1 Schematic diagram of uniform and Guassian energy distributions and the Lidar coordinate system
針對(duì)這種情況,采用基于高斯能量分布的激光雷達(dá)光束模型用于目標(biāo)特性分析。其坐標(biāo)系如圖1(b)所示,z軸正方向?yàn)榧す夤馐膫鞑シ较颍兀▃)為與傳播軸線相交于z點(diǎn)的高斯光束等相位面上的光斑半徑。選取基模高斯球面波,在空間中(x,y,z)點(diǎn)的電矢量表達(dá)式[19]為
式中:A0為常數(shù)因子;ω0為基模高斯光束的束腰半徑,m;f為高斯光束的共焦參數(shù),m;R(z)為與傳播軸線相交于z點(diǎn)的高斯光束等相位面的曲率半徑,m;λ為激光波長,m;L為激光諧振腔腔長,m。
激光雷達(dá)散射截面其定義式[20]為
式中:σ為激光雷達(dá)散射截面,m2;R為目標(biāo)與探測(cè)器之間的距離,m;Ii為入射到目標(biāo)上的能流密度,W/ m2;Ir為反射到探測(cè)器上的能流密度,W/m2。
由式(7)可知,對(duì)于航天器LRCS 的求解,關(guān)鍵在于Ir。基于有限元的思想,通常航天器表面采用三角面元的劃分,因此Ir的求解就轉(zhuǎn)化為單個(gè)三角面元LRCS 在表面上的積分。
以激光雷達(dá)為原點(diǎn)建立坐標(biāo)系,如圖1(b)所示,首先設(shè)一小面元dS,入射功率為dp,入射角為θ,根據(jù)朗伯余弦定理,求解出反射能流密度的表達(dá)式為
式中:ρB為后向反射率;R為目標(biāo)與探測(cè)器之間的距離,m。
則對(duì)于面積為Striangle的三角面元其反射回波能流密度為
單位三角面元的入射功率dp為
由式(8)和式(10)可得,三角面元的反射回波能流密度為
式中:x1、x2為三角面元在x軸上的積分下限、上限;y1、y2為關(guān)于x的積分下限表達(dá)式和積分上限表達(dá)式。
考慮高斯能量分布的情況,其在空間中的電場(chǎng)分布由式(1)可得,將其帶入式(11)得到考慮高斯能量分布情況下的三角面元反射回波能流密度為
已知入射能流密度表達(dá)式[21]為
式中:Pi為入射功率大小,W。
此時(shí)將式(12)~式(14)帶入式(5)可以求出三角面元的激光雷達(dá)散射截面表達(dá)式
式中:σtriangle為單個(gè)三角面元的LRCS 值,m2。
2 基于Z-buffer 消影的航天器復(fù)雜表面LRCS 建模
復(fù)雜表面航天器表面結(jié)構(gòu)復(fù)雜、材料屬性不單一,如將其簡單地視為朗伯體,得到的LRCS 結(jié)果往往不符合實(shí)際情況[22]。針對(duì)材料屬性多樣,且物體后向散射率ρB無法直接求解的問題,通過使用BRDF 統(tǒng)計(jì)模型獲取不同材料在不同探測(cè)條件下的后向散射率,以此改進(jìn)復(fù)雜表面航天器的激光雷達(dá)散射特性模型。單站激光雷達(dá)BRDF 模型如圖2 所示,采用基于菲涅爾反射現(xiàn)象的改進(jìn)Phong 模型[23],其公式如式(16)所示:
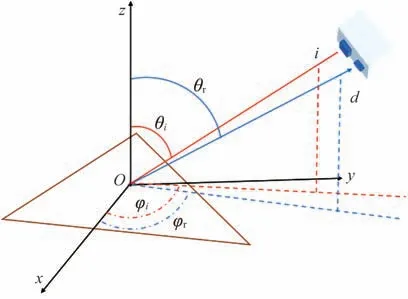
圖2 單站激光雷達(dá)BRDF 計(jì)算模型Fig.2 BRDF calculation model of single-station Lidar
式中:ρd為材質(zhì)的漫反射系數(shù);ρs為材質(zhì)的鏡面反射系數(shù);α為鏡像指數(shù);cosθi為引入的修正漫反射項(xiàng),用以調(diào)節(jié)鏡面的反射強(qiáng)度;β為觀測(cè)方向與鏡面反射方向的夾角,β=min{π/2,β};a>0,以調(diào)節(jié)菲涅爾現(xiàn)象的強(qiáng)度;b>0 用以調(diào)節(jié)鏡面反射分量的增降速度。
常用的航天器表面材質(zhì)上述模型參數(shù)見表1。
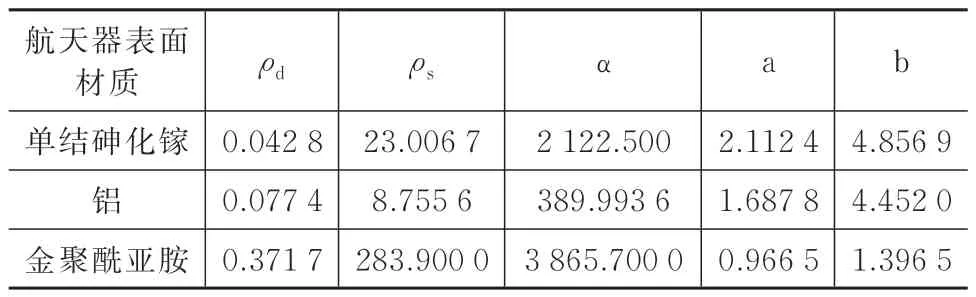
表1 3 種常見航天器表面材質(zhì)的Phong 模型參數(shù)Tab.1 Phong model parameters of three common spacecraft surface materials
通過航天器面元?jiǎng)澐郑梢詫?fù)雜表面分解成形狀和材質(zhì)單一的面元,從而解決了外形復(fù)雜、材質(zhì)多樣化的問題。但劃分以后,沿著激光入射方向不可避免地存在面元遮擋情況。
面元遮擋分為兩種方式:自遮擋和互遮擋。自遮擋即表面未被激光直接照射,如圖3(a)所示,表示激光雷達(dá)照射方向的矢量i與表示面元法向的向量n1之間角度超過90°,即i·n1≤0。由此可得式(17)。
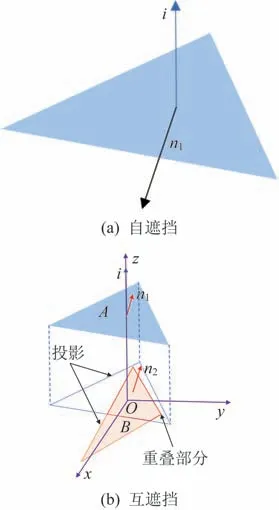
圖3 面元自遮擋以及互遮擋情況Fig.3 Diagram of self-occlusion and mutual occlusion of face elements
式中:Sselfjug為面元自遮擋判斷狀態(tài);當(dāng)Sselfjug=1 時(shí)表示不存在自遮擋;Sselfjug=0 時(shí)表示存在自遮擋。
另外一種即為互遮擋,需要判斷是否存在2 個(gè)面元之間的遮擋情況。如圖3(b)所示。從圖中可以看出面元A與面元B在激光雷達(dá)方向上的投影存在遮擋。通過選取常見的Z-buffer 消隱算法[24]實(shí)現(xiàn)面元的遮擋判斷:首先以激光雷達(dá)照射方向i為z軸建立坐標(biāo)系,并將A、B兩面元投影至xoy平面內(nèi),同時(shí)儲(chǔ)存兩面元的深度信息即zA和zB值。其遮擋判斷的具體表達(dá)如式(18)所示。
式中:Sbuffer為面元剔除狀態(tài);So為兩面元的重疊面積,當(dāng)兩面元的重疊面積So>0 時(shí),表示兩面元存在重疊;zA和zB分別為A、B兩面元的深度值。當(dāng)Sbuffer=A時(shí)表示面元A被剔除,Sbuffer=B表示面元B被剔除,Sbuffer=0 表示沒有面元被剔除。
大部分情況我們利用Z-buffer 消隱算法能夠?qū)γ嬖趽跚闆r進(jìn)行判斷,但是也會(huì)遇到誤遮擋的情況,例如2 個(gè)面元只有極小部分產(chǎn)生遮擋或因計(jì)算機(jī)計(jì)算精度產(chǎn)生誤判斷,這些情況會(huì)導(dǎo)致最終LRCS 計(jì)算結(jié)果的精度降低。因此對(duì)傳統(tǒng)Z-buffer算法進(jìn)行適當(dāng)?shù)母倪M(jìn),添加面積容差的判斷,提高LRCS 的計(jì)算精度。
以下主要總結(jié)了3 種誤遮擋的情況,分別為兩面元異面、兩面元共線以及兩面元共點(diǎn),如圖4所示。
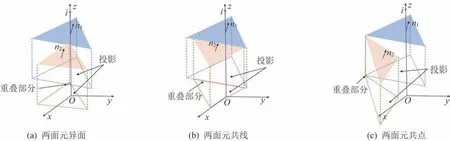
圖4 面元誤遮擋情況Fig.4 Schematic diagram of false occlusion of surface elements
1)兩面元異面表示2 個(gè)面元不存在交點(diǎn),在這種情況下,會(huì)出現(xiàn)兩面元僅由極小部分遮擋而被判定為互遮擋的情況,最終導(dǎo)致面元被舍棄,進(jìn)而損失一部分精度,如圖4(a)所示。
2)兩面元共線表示兩面元存在一條公共邊,由于計(jì)算精度不夠的原因,導(dǎo)致兩面元存在極小的重疊面積,而兩面元實(shí)際并沒有遮擋,此種情況也會(huì)導(dǎo)致LRCS 計(jì)算結(jié)果的不準(zhǔn)確,如圖4(b)所示。
3)兩面元共點(diǎn)表示兩面元僅存在一個(gè)公共點(diǎn),與上述情況(2)類似,因?yàn)橛?jì)算精度導(dǎo)致誤差,誤認(rèn)為兩面元存在遮擋,如圖4(c)所示。
針對(duì)上述3 種情況產(chǎn)生的誤遮擋,提出了一種加入面元容差判斷的算法,其具體算法流程如圖5所示。圖5 流程表明,首先需要計(jì)算兩面元公共頂點(diǎn)數(shù)量N,判斷兩面元是否存在公共點(diǎn):

圖5 誤遮擋判斷流程Fig.5 Flow chart of error occlusion judgment
1)當(dāng)兩面元不存在公共點(diǎn)即N=0 時(shí),則計(jì)算兩面元的重疊面積So,兩面元的投影面積S1和S2,如果So<min(S1,S2)/10,則認(rèn)為兩面元不存在遮擋,反之認(rèn)為兩面元存在遮擋。
2)當(dāng)兩面元存在公共點(diǎn)即N≠0 時(shí),則計(jì)算其中一個(gè)面元在另一個(gè)面元內(nèi)部的頂點(diǎn)的數(shù)量I,如果I=0 表明兩面元不存在包含關(guān)系,接下來判斷如果存在So<10-10,則認(rèn)為兩面元不存在遮擋,反之認(rèn)為兩面元存在遮擋。如果I≠0,則說明兩面元存在包含關(guān)系,認(rèn)為兩面元存在遮擋。
經(jīng)過對(duì)兩面元位置關(guān)系判斷、面元容差的設(shè)置后,消除了計(jì)算誤差導(dǎo)致的兩面元遮擋判斷錯(cuò)誤的情況,以及兩面元僅存在極少部分重疊就判斷為遮擋的情況。
同時(shí)在激光雷達(dá)存在部分照射的情況,如圖6(a)所示。如果對(duì)部分照射的面元直接全部舍棄,將會(huì)降低計(jì)算結(jié)果的精度,所以本文主要采用對(duì)部分照射面元進(jìn)行切割的方法,保留面元被照射到的部分。具體操作方法為:當(dāng)三角面元ABC出現(xiàn)部分照射的面元時(shí),首先計(jì)算三角面元與光斑邊緣的交點(diǎn)J、K,將面ABC沿交線JK劃分成兩部分,并判斷三角面元在光斑內(nèi)部頂點(diǎn)的數(shù)量,當(dāng)存在2 個(gè)頂點(diǎn)在光斑內(nèi)部時(shí),保留梯形面元JBCK,并將梯形面元JBCK沿對(duì)角線劃分成2 個(gè)三角面元JBC和KJC,如圖6(b)所示。當(dāng)存在一個(gè)頂點(diǎn)時(shí),則保留面元JAK,如圖6(c)所示。此方法通過對(duì)部分照射面元進(jìn)行切割提升了算法的精度。
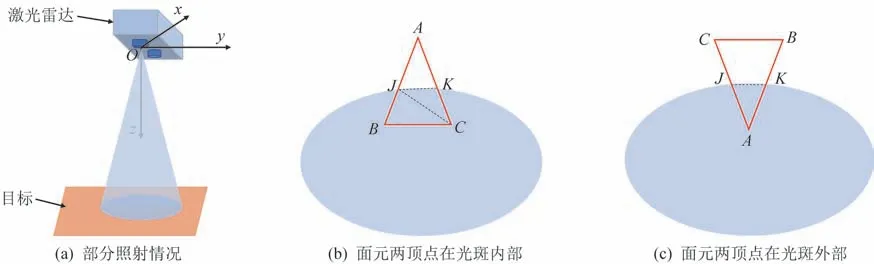
圖6 面元部分照射情況及面元切割Fig.6 Diagram of part irradiation and cutting of surface elements
綜合改進(jìn)后的Z-buffer 消隱算法,基于高斯光束的復(fù)雜表面航天器的激光雷達(dá)散射特性的求解步驟如圖7 所示。

圖7 考慮高斯能量分布的目標(biāo)LRCS 計(jì)算流程Fig.7 Flow chart of target LRCS calculation considering the Gaussian energy distribution
具體步驟如下:
1)3D 模型面元?jiǎng)澐郑菏紫壤?Dmax 建模軟件建立復(fù)雜目標(biāo)3D 模型,并且通過優(yōu)先面元法對(duì)3D 模型進(jìn)行三角面元?jiǎng)澐郑_認(rèn)材質(zhì)屬性,隨后將目標(biāo)3D 模型以obj 格式導(dǎo)出。
2)激光雷達(dá)參數(shù)設(shè)置:確認(rèn)激光雷達(dá)的波長、激光諧振腔腔長,照射距離等參數(shù)。
3)坐標(biāo)系轉(zhuǎn)化:將obj 格式模型中的面元坐標(biāo)以及頂點(diǎn)坐標(biāo)轉(zhuǎn)化到激光雷達(dá)坐標(biāo)系下。
4)有效面元判斷:利用矢量法以及Z-Buffer 消隱算法判斷每次激光光束照射到的有效面元,同時(shí)對(duì)部分照射的面元進(jìn)行面元切割。
5)目標(biāo)整體LRCS 計(jì)算:結(jié)合BRDF 模型,計(jì)算當(dāng)前光束照射下的所有有效面元的LRCS,并對(duì)整個(gè)光斑內(nèi)的三角面元的LRCS 進(jìn)行累加,獲得整體的LRCS。
3 航天器LRCS 計(jì)算與分析
3.1 標(biāo)準(zhǔn)圓形薄片的LRCS 計(jì)算與分析
通過構(gòu)造有解析解的標(biāo)準(zhǔn)體對(duì)前面提出的方法進(jìn)行分析和驗(yàn)證。在考慮高斯能量分布的情況下,當(dāng)激光雷達(dá)照射在朗伯體圓形平面上時(shí),其LRCS 值存在解析解。因此選擇朗伯體圓形薄片驗(yàn)證本算法的準(zhǔn)確性。
當(dāng)目標(biāo)為朗伯體表面時(shí),其半球反射率為ρ2π,BRDF為ρ2π/π,入射角為?,探測(cè)距離為z,光斑半徑為ω(z),則可以得到朗伯體圓形平面的LRCS 表達(dá)式為[25]
為了驗(yàn)證面元遮擋判斷算法的準(zhǔn)確性,構(gòu)造了一個(gè)含內(nèi)外層的圓形薄片,其3D 模型如圖8(a)所示;圓形薄片三維重建圖如圖8(b)所示:紅色部分為外層,藍(lán)色部分為內(nèi)層;外層半徑R,內(nèi)層半徑R’,外層薄片厚度H,內(nèi)層薄片高度H’。
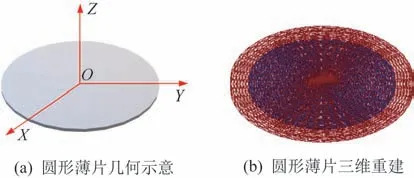
圖8 圓形薄片幾何示意及三維重建Fig.8 Geometric diagram and 3D reconstruction of circular wafer
調(diào)節(jié)光斑大小ω(z),使其剛好等于當(dāng)前圓薄片的半徑R,仿真參數(shù)分別為:波長λ=1.064×10-6m,激光諧振腔腔長L=1 m,半球反射率ρ2π=0.5,入射角?=0,探測(cè)距離z隨光斑半徑大小改變。假設(shè)外層高度H=0.1 m,光斑半徑取值范圍R=[0.1,1],每次取值間隔0.1 m,從而形成10 個(gè)外層圓形薄片;在這外層圓形薄片下嵌套同一大小的內(nèi)層薄片,其半徑假設(shè)R’=0.08 m,高度H’=0.005 m。添加Z-buffer 消隱算法前后的LRCS 計(jì)算值如圖9所示。
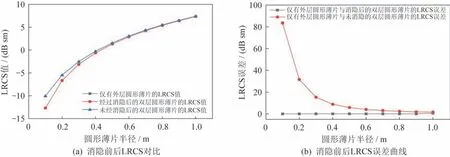
圖9 不同半徑圓形薄片Z-buffer 互遮擋消隱判斷前后LRCS 對(duì)比曲線及誤差曲線Fig.9 Comparison and error curves of LRCS before and after Z-buffer mutual occlusion blanking judgment on circular slices with different radii
對(duì)比圖9(a)可以看到,針對(duì)不同半徑圓形薄片,將采取Z-buffer 互遮擋消隱判斷后的LRCS 值與僅有外層圓形薄片的LRCS 值相比較,可以看出兩者曲線吻合度較好,由圖9(b)可以看出,未采取Z-buffer 互遮擋消隱判斷的雙層圓形薄片與僅有外層圓形薄片之間的LRCS 計(jì)算結(jié)果存在較大誤差,且在當(dāng)雙層圓形薄片內(nèi)外兩層的面積相差越小時(shí),誤差越大,證明了消隱算法的有效性和必要性。
同時(shí)對(duì)比消隱后的LRCS 仿真值與圓形薄片理論值,以及均勻光束理論值以驗(yàn)證消隱算法的準(zhǔn)確性,對(duì)比結(jié)果如圖10 所示。
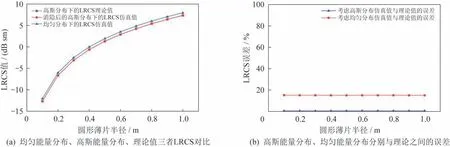
圖10 不同半徑圓形薄片的LRCS 仿真算法與解析法的對(duì)比Fig.10 Comparison of results for circular slices with different radii obtained by the LRCS simulation algorithm and the analytical method
圖10(a)中黑色曲線為解析解,即可認(rèn)為是真值,紅色曲線為考慮高斯能量分布下的LRCS 仿真結(jié)果,藍(lán)色曲線為考慮均勻能量分布下的LRCS 仿真結(jié)果,可以看出考慮高斯能量分布下LRCS 計(jì)算方法的結(jié)果與理論值基本吻合。由圖10(b)可以看出考慮高斯能量分布下的LRCS 計(jì)算結(jié)果誤差均值為0.56%,而分析造成這種誤差的原因主要在于利用三角面元擬合圓面時(shí),其邊緣仍是不斷趨近于圓的多邊形,會(huì)造成一部分面積的缺失,所以在計(jì)算LRCS 的時(shí)候,也會(huì)產(chǎn)生一定的計(jì)算誤差。同時(shí)對(duì)比考慮均勻能量分布下的LRCS 計(jì)算結(jié)果則與理論值相差角度,誤差均值為15.13%,可以得出在考慮高斯光束能量分布下的LRCS 計(jì)算精度提升了14.58%。
3.2 復(fù)雜表面航天器LRCS 計(jì)算與分析
選取常見的航天器3D 模型進(jìn)行復(fù)雜表面航天器的LRCS 計(jì)算,航天器主要由包覆金聚酰亞胺的衛(wèi)星本體,以及由單結(jié)砷化鎵電池板組成太陽帆和鋁制金屬衛(wèi)星天線3 部分組成,如圖11(a)所示。仿真Lidar 采用單站模式進(jìn)行LRCS 探測(cè)仿真。基于運(yùn)動(dòng)相對(duì)性,把探測(cè)器繞衛(wèi)星進(jìn)行LRCS 探測(cè),等效為Lidar 不動(dòng),而衛(wèi)星在轉(zhuǎn)動(dòng),一共有2 種模式:模式1:Lidar 在Z方向,航天器繞X軸旋轉(zhuǎn)一周,如圖11(b)所示;模式2:Lidar 在X方向,航天器繞Z軸旋轉(zhuǎn)一周,如圖11(c)所示。

圖11 航天器本體及Lidar 探測(cè)Fig.11 Schematic diagram of spacecraft body and Lidar detection
假設(shè)Lidar 光斑半徑ω(z)=0.7 m,能夠覆蓋整個(gè)航天器;基于改進(jìn)Z-buffer 消隱算法后的LRCS計(jì)算結(jié)果如圖12 所示。
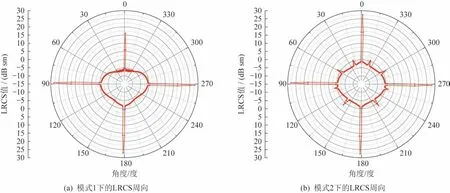
圖12 Lidar 掃描下衛(wèi)星不同姿態(tài)的LRCS 周向Fig.12 LRCS circumferential map of spacecraft with different attitudes under Lidar scanning
由圖12 中的仿真曲線分析可知:
1)當(dāng)Lidar 入射角為0°、90°、180°、360°時(shí)LRCS值較大,且呈現(xiàn)對(duì)稱分布。因?yàn)樵谶@4 個(gè)角度方向上,衛(wèi)星外型特征呈現(xiàn)對(duì)稱分布,并且是激光反射最大的方向。
2)將圖12(a)和圖12(b)合成就可以得到模型的LRCS 全向圖。從數(shù)據(jù)分析可以看出,當(dāng)Lidar 直射通信天線、衛(wèi)星底部、太陽翼時(shí)LRCS 最大;在順著太陽翼方向探測(cè)時(shí),LRCS 最小,因?yàn)檫@些方向下反射面積最大或者最小,整個(gè)LRCS 趨勢(shì)與實(shí)際情況相吻合。
4 結(jié)束語
本文提出了一種改進(jìn)的復(fù)雜航天器激光雷達(dá)散射特性建模方法,以提高模擬的精度。
1)首先用更準(zhǔn)確的高斯能量分布模型替代均勻能量分布模型建立激光光束模型,減少了由光源特性不準(zhǔn)帶來的誤差。
2)而針對(duì)多材質(zhì)、非連續(xù)表面帶來散射特性難模擬的問題,采取有限元思想,通過對(duì)單一材質(zhì)和形狀的面元輻射特性的積分予以解決。其中激光光束照射下,面元遮擋導(dǎo)致的散射特性誤差的問題,則通過改進(jìn)Z-Buffer 消隱算法進(jìn)一步消除。
3)最后仿真分析表明,本文提出的這套完整算法精度提高了14.58%;而對(duì)典型復(fù)雜表面航天器在不同激光雷達(dá)入射角度下的LRCS 分析,得到了與實(shí)際情況相一致的結(jié)論。
4)不過由于本文工作主要是和理論解析解進(jìn)行對(duì)比分析,還缺乏實(shí)際驗(yàn)證,因此下一步將采用真實(shí)的激光雷達(dá)和衛(wèi)星模型來進(jìn)一步驗(yàn)證;但本文工作對(duì)于后續(xù)航天器的激光雷達(dá)隱身設(shè)計(jì)提供了有價(jià)值的參考模型。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19