一種基于虛實結合的內外場一體化訓練實現方法 *
2024-03-18 07:22:10胡寶潔宮福紅賀方君王盼
現代防御技術 2024年1期
關鍵詞:信號
胡寶潔,宮福紅,賀方君,王盼
(中國人民解放軍63893 部隊,河南 洛陽 471000)
0 引言
空襲與防空作戰的體系性強、涉及武器裝備多,在訓練中面臨力量體系構全難和戰場態勢難構建等問題。外場實兵實裝訓練具有對抗激烈、操控感強、體驗真實等優點,但是存在模擬環境構設難、訓練消耗大、組織協同難,且過程重復性差等不足;內場仿真訓練具有不受條件限制、可重構性強、效費比高等優勢,但存在體驗不夠真實、逼真度不夠高等不足。
基于內外場資源條件,綜合集成真實、虛擬、構造(live,virtual,construction,LVC)資源,采用虛實結合的手段,構建同時具有真實目標和虛擬目標的電磁威脅訓練環境,設置更加連貫完整的體系架構,將成為提升部隊能力水平和訓練層次質量,推動訓練模式方法創新的重要手段[1-4]。
1 內外場一體化訓練基本概念
外場訓練是指傳統的實兵實裝訓練。內場訓練是基于開放可重構、大數據、虛擬現實等技術的一種低消耗、可重復訓練方式,主要包括計算機仿真訓練、半實物仿真訓練等[5-6]。內外場一體化訓練方法是基于“科技+”賦能的新型組訓模式,其核心是將異地分布、形態不同的數字仿真模型、半實物模擬裝備和實體裝備映射到時空一致的虛擬戰場空間,實現物理上互聯互通、行動上實時交互、效果上耦合傳遞,形成“邏輯一體、虛實結合、效應一致”的體系訓練環境,在統一戰情驅動下開展紅藍體系對抗,是提高訓練資源使用效率、增強對抗訓練體系性的重要手段。具有以下特點優勢:
(1) 注重同實際一致的感受
通過電磁目標信號偵察與反演復現,讓受訓人員真實感受強敵電磁威脅;按照實案構設戰場態勢,基于統一戰情驅動作戰進程,確保作戰節奏和對抗強度貼近實戰;根據指揮流程和信息流轉關系,牽引籌劃決策和對抗博弈,增強受訓人員戰場沉浸感。
(2) 體系對抗特征更加突出
以外場實兵為主體,采用虛擬兵力補全紅藍交戰體系,構建更加完整的指揮線和行動線,便于在更加完備的作戰空間深化編配部署、情報融合、目標分配,推動電磁交戰效果有效疊加于體系作戰效能。
(3) 對抗態勢更加靈活可控
基于內外場一體聯動,可以設置更加豐富的戰情、更加多元的目標、更加復雜的場景,能力摸邊探底更加充分;通過“虛飛”代替“實飛”、“打數據”代替“打實彈”等手段,便于開展高風險、高難度訓練科目。
(4) 可重復性強便于溯源分析
聚焦典型場景和關鍵問題,可多次迭代訓練,獲取大樣本數據,便于對作戰效能、影響機理進行客觀評價和深化分析。
(5) 資源高效集成效費比高
通過軍地資源共享、異地資源融合,實現多靶場高效聯動,形成一體化練兵格局。
2 虛實結合關鍵技術分析
基于虛實結合的內外場一體化訓練涉及信息、信號2 個層面的虛實交互感知,兵力空間屬性上包括實裝空間和虛擬空間之間、虛擬空間內部的相互感知與互操作[7]。虛實結合要求真實兵力和虛擬兵力之間能夠感知到對方的存在,并能夠根據實際作戰規則進行協同或對抗交互活動[8-9]。實現虛實結合主要解決兩大技術難題:①實兵感知和抗擊虛兵的技術,指在實兵的雷達顯示終端上顯示其探測范圍內的虛兵,并對虛兵開展抗擊行動;②虛兵感知實兵技術,在虛擬空間作戰平臺上感知到真實裝備的主要作戰動作,裁定實兵對虛兵的毀傷情況。
2.1 基于空饋方式的實兵感知虛兵技術
實兵感知和抗擊虛兵的基本要求為目標航跡可控、可選目標類型、可增加電磁干擾手段。具體實現方法為:使用雷達目標回波模擬器,依據其接收到的虛兵模型,在數據驅動下進行空間信號輻射,紅方雷達進行實時探測,在雷達顯示終端上顯示虛兵的狀態和行為信息,進而將虛兵信息融入到真實的戰場環境中。雷達目標回波模擬器通過模擬空襲目標的回波,使雷達屏幕上真實地顯示虛擬目標的飛行航跡,這就要求對模擬器產生的回波參數進行精確控制,使模擬目標的回波與真實目標的回波“真假難辨”,才能在雷達上產生更加逼真的虛擬航跡,主要涉及到目標回波控制、航跡控制和多雷達航跡統一[10-12]。
2.1.1 目標回波控制
雷達目標回波模擬器目標航跡生成主要基于數字射頻存儲器(digital radio frequency memory,DRFM)技術實現,原理如圖1 所示,其中R為模擬目標與雷達的距離,R1為雷達目標回波模擬器與雷達的距離。模擬目標的距離參數主要通過控制信號延遲來實現,以接收到雷達發射脈沖前沿作為觸發條件開始脈沖采集和延遲計時,在完成延遲計時后進行采集的全脈沖轉發,每個脈沖轉發延遲時長為

圖1 雷達目標回波模擬器原理示意圖Fig. 1 Schematic diagram of the radar echo simulator
式中:γ為DRFM 的硬件響應時間;c為光速。
為防止雷達在動目標顯示(moving target indicator,MTI)模式下將模擬運動目標回波對消,需要對模擬目標的回波進行多普勒頻率調制。假設模擬目標迎面向雷達飛行,多普勒頻率為正,設目標運動速度為v,波長為λ,需要調制的多普勒頻移為
雷達目標回波模擬器的使用模式包含機載模式和地面模式2 種類型,其工作時應當保證天線架設高度大于雷達天線陣面高度,并且符合遠場條件,雷達目標回波模擬器與雷達的距離為
式中:L為雷達天線的直徑。
雷達目標回波模擬器發射的回波信號功率應當保證實體雷達接收到的信號功率符合雷達方程,即雷達在探測模擬目標的回波信號時,天線收到的回波平均功率與模擬目標距離的四次方成反比關系;而雷達接收雷達目標回波模擬器發射的回波模擬信號的功率與兩者之間距離的平方成反比關系。若保證雷達實際接收到的模擬器信號功率與應當接收到的模擬目標回波信號相等,則模擬器在某一時刻的發射功率應當為
式中:Pr為雷達發射峰值功率;Gr為雷達天線增益;Gj為模擬器天線增益;ρ為極化失配損失;σ為模擬目標的平均雷達散射截面積(radar cross section,RCS)。
在雷達信號檢測能力測試中,需要進一步模擬目標的RCS 閃爍特性,利用其設計不同均值大小、起伏變化周期的RCS,形成不同作戰類型的空中目標,如直升機、預警機、戰斗機、反輻射導彈等,為雷達裝備指揮員與操作手提供豐富、多樣的空中威脅態勢。
2.1.2 基于仿真數據驅動的航跡模擬
基于仿真數據驅動的航跡模型設計決定了所生成空中目標的飛行相關參數,如位置、速度、高度等。首先在經緯坐標系下依據預先設計的航跡生成一系列仿真點跡數據,然后基于仿真點跡數據與當前雷達裝備所在位置進行數據融合,實現對雷達裝備的自定義目標航跡設置。目前可設計的航跡有徑向俯沖航跡、徑向水平航跡、切向水平航跡。
徑向俯沖航跡模擬需利用無人機載平臺將目標回波模擬器固定于相應高度,設定模擬目標的飛行高度、速度、與雷達的起止距離后,將雷達回波模擬器天線對準雷達的天線陣面,實現雷達信號的接收與目標模擬信號的輻射,即可完成對雷達徑向俯沖航跡的模擬。
徑向水平航跡模擬中,模擬目標的方位是不變的,其對雷達是相向飛行的,因此模擬目標相對雷達只有距離和俯仰角度的變化,具體模擬方法如圖2 所示。雷達在點O位置,雷達目標回波器起始位置為M1,豎直運動至位置M2,起始高度為h,模擬目標飛行起始位置為A,勻速飛行至點B,飛行高度恒為H,飛行距離為
圖2 徑向水平航跡模擬方法Fig. 2 Radial track simulation method
式中:v為模擬目標的速度;Δt為模擬目標從點A運動至B用時間。
由相似關系可得,點B在水平面投影與雷達位置點O間的距離可表示為
同理由相似關系可知,雷達目標回波模擬器運動的高度可表示為
則搭載雷達目標回波器的無人機載平臺的運動速度為
通過控制無人機載平臺的豎直運動速度保持為vt,可實現模擬目標以速度v從A點勻速運動至B點,當模擬目標做變速運動時同理可計算出無人機載平臺的運動速度。
切向水平航跡的模擬除了需要模擬目標相對雷達在距離和俯仰角度上的變化,還需要模擬目標在不同方位上的輻射變化。切向航跡的模擬原理如圖3 所示,O點為雷達觀測點,M1-M2是搭載雷達目標回波器的無人機載平臺飛行路線,A-B是模擬目標的飛行路線。
圖3 切向航跡模擬方法Fig. 3 Tangential track simulation method
在圖3 中,模擬目標由點A運動至點B,高度恒為H,AB段可采樣為多個航跡點,時間采樣點為T=[t0,t1,t2,t3,…tn,tn+1],目標運動速度在單個采樣間隔內可視為恒定,該采樣間隔內速度矢量為vi=雷達目標回波模擬器由點M1運動至M2,同理在該采樣間隔內無人機載平臺速度矢量為根據相似關系可知,無論模擬目標的運動軌跡為直線或曲線,模擬目標在方位上的連續變化可以近似為雷達目標回波模擬器做相似軌跡的運動,即在距離和速度上都按照比例關系對應計算,即
式中:ti為第i個采樣時刻;為模擬目標在ti時刻距離雷達的距離;為無人機載平臺在ti時刻距離雷達的距離;R(t0)為模擬目標在t0時刻距離雷達的距離;R1(t0)為無人機機載平臺在t0時刻距離雷達的距離。
2.1.3 多雷達航跡統一
理論上由于需要控制模擬目標回波信號只被雷達主瓣接收,所以單個雷達目標回波生成硬件模塊只能對單個雷達形成穩定、連續航跡,而對于多個雷達則需要配置多個雷達目標回波生成硬件模塊。如圖4 所示,這2 類雷達的信號分屬于不同頻段,因此雷達回波生成模塊外接的天線波段,以及模擬目標回波的脈寬、重周、頻段也需隨所偵察到的雷達信號變化。
圖4 預警雷達和火控雷達的模擬目標生成Fig. 4 Simulated target generation of EWR and FCR
預警雷達與火控雷達的距離為D,模擬目標與預警雷達間的距離為Rv,在空間慣性參考坐標系下與預警雷達觀測原點的方位角為θ,模擬目標與預警雷達間的距離為Rh,以對預警雷達模擬目標回波時延控制為基準,則需對火控雷達模擬目標回波進行補償,具體為
式中:Δτ為時延補償值;Ry(t)為模擬目標距預警雷達的實時距離,由仿真數據計算生成;Rh(t)為模擬目標距火控雷達的實時距離。
設火控雷達的時間分辨率為th,當D較小,|Δτ| ≤th時,通常無需進行時延補償;當|Δτ| >th時,以Δτ對火控雷達目標模擬進行時延補償。
2.2 基于代理的虛兵抗擊實兵技術
虛兵感知實兵的具體實現方法為:在實裝上加裝數據采集設備作為虛兵代理,實時采集實兵的狀態和行為信息,在戰情驅動下,通過數據傳輸到虛擬空間作戰平臺,實現實兵狀態和行為在虛擬空間的實時更新。
雷達目標回波模擬器和實裝信號采集設備在實踐中作為虛實轉換器的角色,實現了信號層面的虛實戰情轉換。基于實時戰情的需要,虛實轉換器依托導調控制網在線控制,實現虛擬空情向實體裝備的實時映射,以及虛擬平臺對實時戰情的實時感知,達到了虛實互感互抗的效果。虛兵抗擊實兵的工作流程如圖5 所示。
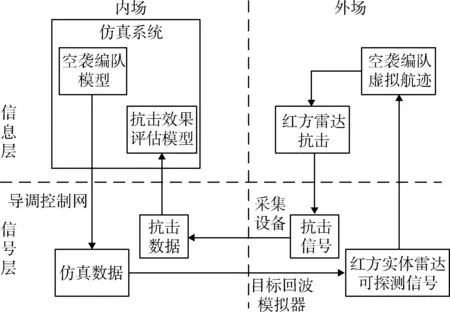
圖5 虛兵抗擊實兵工作流程Fig. 5 Work flow of virtual against real
內場仿真系統事先構建空襲編隊模型,根據戰情牽引,內場通過導調控制網將仿真數據推送給外場的雷達目標回波模擬器。回波模擬器接收內場仿真數據將其轉換為紅方實體雷達可探測的電磁波信號,包括空襲編隊的雷達回波信號和機載干擾設備釋放的干擾信號,實體雷達上顯示仿真的空襲編隊航跡以及受干擾情況。紅方依據作戰流程,對目標開展搜索、跟蹤、抗擊以及抗干擾操作。加裝在實裝上的采集設備采集抗擊信號,通過導調控制網將抗擊數據回傳給內場仿真系統,系統根據實裝抗擊的時刻以及虛擬空襲編隊的飛行打擊數據進行仿真評估,完成一次實裝武器系統對虛擬空襲編隊的抗擊訓練。
3 應用舉例
3.1 虛實兵力構建原則
(1) “實兵為主、虛兵為補、虛實互補”
盡量保證訓練主體的實兵化,即受訓方兵力及與其直接交戰的兵力盡量采用實兵實裝實抗的方式,對部分要素不全或調遣困難的兵力可采用半實物仿真和計算機生成虛兵的方式進行模擬[13]。通過“虛實兵力互補”,充分發揮實兵模擬與虛兵仿真的技術優勢,構建模擬要素齊全、虛實融合緊密的訓練體系,最大限度為受訓部隊提供實戰化練兵環境。
(2) “邏輯一體、內外聯動、虛實互感”
通過構建一個與真實戰場空間同步的虛擬戰場空間,在虛擬戰場中構建要素齊全的對抗體系,通過實兵代理成員,外場實兵與內場虛兵共存于虛擬仿真環境中,邏輯上處在同一戰場空間[14-15]。內外場兵力在統一戰情驅動下,外場真實戰場開展實裝實兵對抗,通過虛實融合終端,感知虛兵并進行抗擊;內場虛擬戰場開展火力打擊、效能評估等活動,通過相應的發布與定購策略自動完成對實兵的感知和抗擊,將對抗結果實時反饋至真實戰場,實時控制戰場行動和進程,同步評估訓練效果。
3.2 訓練總體設計
訓練總體架構區分紅、藍、白三方力量,其中紅藍雙方參訓裝備用于構建對抗態勢,白方保障裝備作為實現內外場一體聯動訓練的關鍵要素,體系架構如圖6 所示。
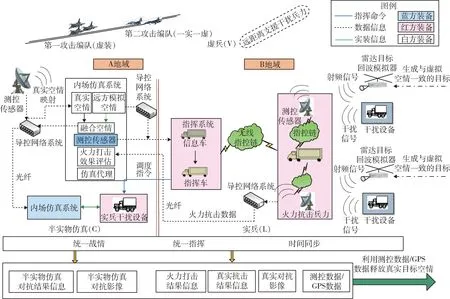
圖6 內外場一體化訓練體系架構Fig. 6 Architecture diagram of integrated training system for inside and outside field
紅方以實兵實裝對抗為主、虛擬裝備補充為輔。實兵實裝方面,主要參訓力量涵蓋雷達、通信、雷達對抗、光電對抗、火力抗擊等要素,體系相對較為完善。但偵察和火力相對薄弱,因此可以通過內場仿真資源生成相應虛兵要素加以補充。通過虛實兵力結合,將火力抗擊力量在作戰使用和抗擊行動等方面有機融合,以達到防御目的。
藍方以虛兵為主、實裝為輔。藍方主要由戰斗機、電子戰飛機、預警機等組成的飛行編隊,同時根據作戰進程需要發射巡航導彈、反輻射導彈、精確制導炸彈等武器。通過內場仿真資源計算機生成戰斗機、反輻射導彈、精確制導導彈等虛擬目標,同時融合實裝飛行目標構建多樣化空情。在虛擬戰場中,構設多批次進攻編隊,在遠距離支援干擾、隨隊干擾、自衛干擾等電磁干擾掩護下,對紅方目標實施打擊,進而實現復雜戰情構建。實裝資源方面,使用地面裝備實施干擾。在構造的資源方面,使用無人機載雷達干擾設備在戰情驅動下以空饋方式對紅方雷達實施干擾,模擬自衛干擾行動。使用多個雷達目標回波模擬器以空饋方式在紅方雷達上形成各類型目標。
白方,構建“一網一鏈一平臺”。“一網”指的是導調控制網,用于實裝數據采集、虛實數據傳輸、導調控制指令流轉等。“一鏈”指的是信息傳輸鏈路,通過對各參訓系統節點、交互實體、交互事件等信息進行配置,實現從虛兵到實兵、從實兵到虛兵、從信息層到信號層的交互。“一平臺”指的是內外場聯動訓練平臺,利用軟件中間件和仿真代理技術,將作戰平臺實裝、武器控制系統實裝、真實飛行靶機和內場仿真系統綜合集成,構建一個結構分層、地域分布、強弱實時混合、時空一致的平臺。
基于參訓兵力,充分發揮實兵模擬與虛兵仿真的技術優勢,采用“實兵+虛兵”方式補齊紅藍力量要素,建全對抗體系,構建1:1 交戰場景,借助“虛實互感”技術模擬多樣復雜空情,打通火力打擊閉環,營造逼真體系作戰環境,完成作戰鏈條完整呈現。
4 結束語
本文所提訓練方法綜合運用內外場資源,構建了與真實戰場空間同步的虛擬戰場空間,實時控制戰場行動和進程,同步評估訓練效果,針對性解決了虛實兵力在信號層面和信息層面的互感互抗等難題。基于虛實結合的內外場一體化訓練實現方法在確保訓練效果的同時可較好地兼顧訓練效費比,為聯合作戰環境體系構建、訓練模式創新提供了一種有效的途徑。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06