潛艇強機動變深規避魚雷攻擊仿真研究 *
2024-03-18 07:22:22丁文強丁浩趙志允
現代防御技術 2024年1期
關鍵詞:深度
丁文強,丁浩,趙志允
(海軍潛艇學院,山東 青島 266199)
0 引言
潛艇在執行作戰任務時,會面臨來自空中、水面和水下的威脅,其中,最直接的威脅是各種反潛武器的攻擊。現代魚雷高性能戰斗部、智能識別和精確制導等技術的快速發展,使魚雷對潛艇的威脅更趨嚴重。當潛艇發現來襲魚雷攻擊征兆時,可以采取常規機動駛離魚雷搜索帶、使用對抗器材、強機動等多種規避方法[1-2]。但是,魚雷航速、航程以及聲自導性能的不斷快速發展,使魚雷能夠快速準確地捕獲潛艇目標。對于潛艇而言,以往某些行之有效的規避對抗手段在新型魚雷搜索攻擊過程中難以發揮作用。當潛艇采用其他規避方法無法有效應對魚雷攻擊時,利用強機動變深來進行規避魚雷末端攻擊彈道,是潛艇不得已而用之的規避措施,也是潛艇防御魚雷的最后措施。應當對該方案的有效性加以驗證和研究,這對提高潛艇生命力和戰斗力具有十分重要的理論研究意義和軍事應用價值。
1 強機動變深規避方案分析
1.1 強機動規避方案基本原理
潛艇強機動是潛艇在水下高速航行狀態下,以大舵角改變航向或以大縱傾改變深度的機動,或者在改變航向的同時改變深度的機動[3]。潛艇在遭受反潛魚雷攻擊的過程中,當聽測到來襲魚雷的主動脈沖信號重復周期逐漸變短、魚雷航行噪聲不斷增強時,可以判明魚雷已有效跟蹤潛艇并不斷向潛艇駛近。若魚雷已抵進距潛艇較近距離,潛艇在采用其他規避措施確無效果,此時應果斷采用強機動措施進行規避魚雷末制導攻擊。魚雷若因潛艇強機動丟失目標后,一般會沿丟失目標前的雷目連線方向直航一定距離后執行再搜索。此時,潛艇可執行淺水層停車或低速機動等后續戰術動作進行規避。強機動規避方案的根本目標是:通過潛艇急劇變向或變深機動,使魚雷在短時間內丟失對潛艇的捕獲跟蹤或魚雷非觸發引信無法動作,從而達到潛艇規避魚雷末端攻擊彈道的效果[4]。此規避方案應注意使用時機,特別是針對潛艇強機動變深速浮到水面狀態的規避方案而言,應當是在確定藍方海面和空中反潛兵力較弱或者有其他紅方兵力支援時采用,否則從潛艇安全性考慮是不宜采用的。
1.2 外軍研究情況
文獻[3]中顯示美軍已經開展了潛艇采用強機動規避魚雷攻擊的理論研究和實際驗證。他們曾實驗使潛艇以尾傾大于30°的姿態從水下突然上浮至海面,并作為其規避魚雷攻擊的手段之一。再如,在2018 年,伊朗海軍位于霍爾木茲海峽進行大規模軍事演習時,按照演習計劃伊朗海軍在指定海域投下70 枚深水炸彈,結果卻發生了意想不到的一幕:深水炸彈爆炸的同時美軍3 艘核潛艇也急速浮出水面[5],如圖1 所示。由此可見,潛艇強機動速浮至水面或淺水狀態未嘗不是一種保持潛艇生命力的可行方法。

圖1 潛艇大縱傾浮出水面示意圖Fig. 1 Diagram of submarine breakwater by a big tail incline
1.3 強機動方式效果
潛艇強機動方式從理論上講可以有3 種:①水平面快速變向;①垂直面快速變深;③同時進行快速變向和變深[6]。水平面快速變向是指潛艇高速航行狀態,操縱方向舵以較大舵角進行旋回,使潛艇快速進入魚雷水平面的最小旋回圈之內,魚雷不能對我潛艇進行攻擊,從而達到規避魚雷攻擊的效果。一般情況下,魚雷均存在末端攻擊直航彈道,即魚雷與目標達到一定近的距離后,在水平面內魚雷不再進行擺舵機動,而是直接向最后一個探測目標位置點航行完成攻擊,因此,當潛艇和魚雷接近到一定距離時,魚雷進行直航攻擊,如果潛艇把握好時機進行轉向,使魚雷從潛艇側面穿過,同時潛艇與魚雷之間的距離大于魚雷的非觸發引信作用距離,理論上也可以實現有效規避。潛艇垂直面快速變深強機動包含速浮和速潛2 種,速浮是使用高壓氣吹除壓載水柜的水和車、舵同時作用,而速潛是向壓載水柜注水和車、舵同時作用,但是高壓氣排水效率要優于注水效率,故速浮的變深速率要遠大于速潛的變深速率,同時考慮到反潛魚雷在淺水攻擊能力較差的特點,因此應著重研究潛艇速浮至接近海面,避開魚雷彈著點進行規避的方案。
綜上,潛艇想要快速改變水平面的航向只能采用高航速大舵角的方式,其變向效果相對有限;而潛艇進行速浮時,可以采用車、舵和高壓氣吹除水柜的水來快速獲取正浮力,從而使潛艇急速上浮,相比于變向而言,其速浮的變深效果要更加有效;而同時進行變向變深難以操縱而且同樣涉及變向效果較為有限的問題。因此,本文主要圍繞潛艇采用強機動變深規避魚雷攻擊的過程進行仿真計算,并分析其可行性和有效性。
2 潛艇強機動變深規避魚雷過程仿真
2.1 設置參數
在仿真過程中,首先對潛艇和魚雷攻防過程的各個參數進行設置:潛艇進行強機動時魚雷與潛艇之間的初始距離為D;潛艇開始強機動后經過的時間為t;潛艇強機動初始航速為vs;潛艇強機動的縱傾角度為β;潛艇由于高壓氣排水產生的初速度為v0;潛艇由于高壓氣排水產生的平均加速度為a;潛艇的艇長為l;魚雷的旋回半徑為r;魚雷的旋回角速度為ω,反潛魚雷的近炸引信探測距離為d,如圖2所示。反潛魚雷攻擊階段進行縱傾操舵的指令是由一個確定脈沖寬度的脈沖τ決定,這個操舵指令脈沖是在接收到有效回波脈沖之后延遲Δτ開始的,即當魚雷探測到潛艇變深后經τ+ Δτ后啟動縱傾操舵,在仿真過程中即魚雷轉向滯后于潛艇強機動變深的時間差。另外,由于潛艇強機動規避魚雷末彈道的時間較短,海洋環境對攻防過程中潛艇和魚雷機動的影響相對較小,故將海洋環境參數設定為典型場景:聲場類型為表面聲道,海況等級為3 級,海水溫度為20 ℃,混合層厚度為100 m。
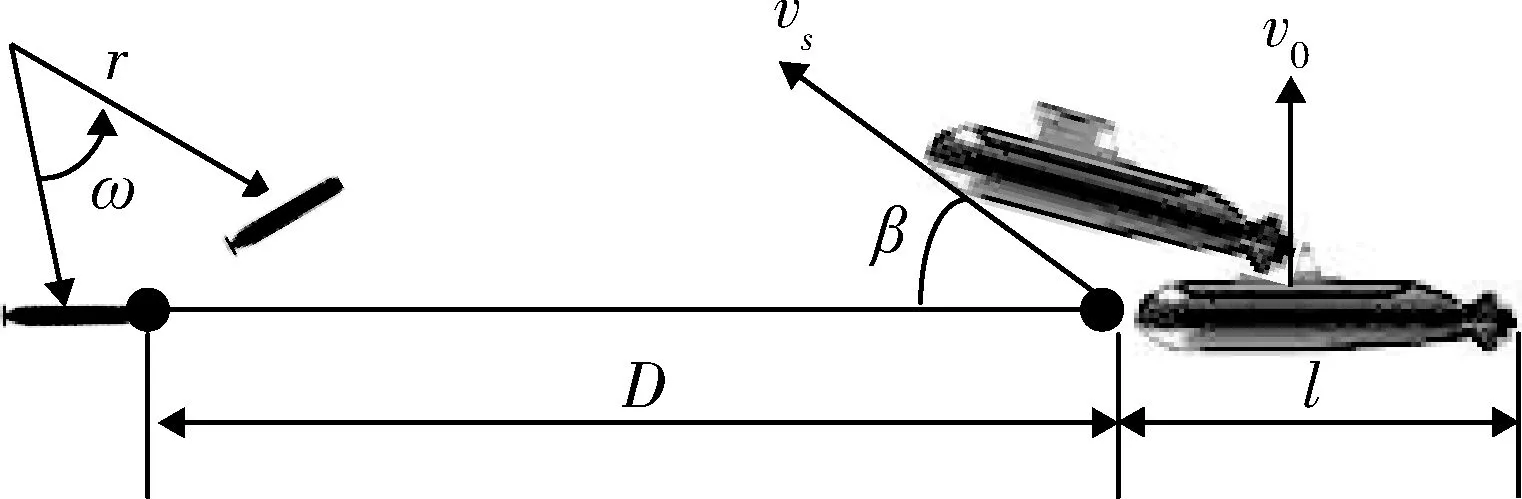
圖2 設置參數示意圖Fig. 2 Schematic diagram of setting parameters
2.2 仿真過程
由于魚雷速度要遠大于潛艇機動速度,所以在對潛艇強機動變深規避魚雷攻擊進行仿真的過程中,不再考慮潛艇采用較低航速機動擺脫魚雷跟蹤的情況,而是使潛艇迎向魚雷盡快進入魚雷末端攻擊旋回圈內,并且在一定時間范圍內潛艇的深度變化量需要大于魚雷追蹤彈道的深度變化量。此時,潛艇位置點位于魚雷攻擊旋回圈范圍之內,使魚雷非觸發引信不能動作,從而達到規避魚雷末端攻擊彈道的效果。在魚雷旋回圈內,潛艇和魚雷的深度變化量隨時間變化的關系如圖3 所示。
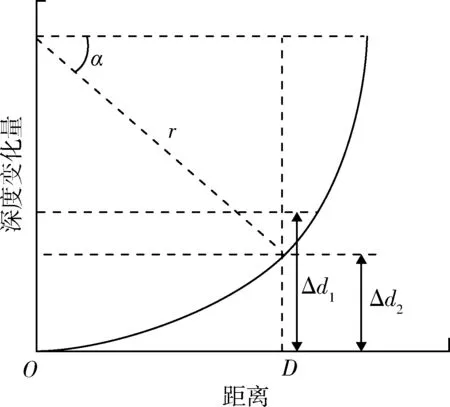
圖3 垂直面變深強機動時潛艇和魚雷的深度變化量隨時間變化的關系圖Fig. 3 Relationship diagram of depth-changing between submarine and torpedo along with time
圖3 中Δd1為潛艇深度變化量,Δd2為魚雷深度變化量。只有當Δd1>Δd2時,潛艇才能有效規避魚雷末端攻擊彈道。可以得出潛艇與魚雷水平距離為
潛艇與魚雷垂直距離為
式中:t′為魚雷末端彈道追蹤潛艇的計時時間:
建立潛艇和魚雷機動模型,使用Matlab 工程仿真軟件對強機動規避過程進行仿真[7-13],可以得出當潛艇與魚雷處于一定的初始距離(以117 m 為例)時兩者深度變化關系和水平距離關系,分別如圖4,5 所示。
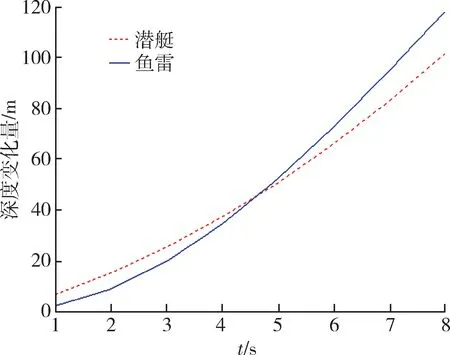
圖4 潛艇與魚雷深度變化關系圖Fig. 4 Changing relationship diagram of vertical distance between the submarine and the torpedo
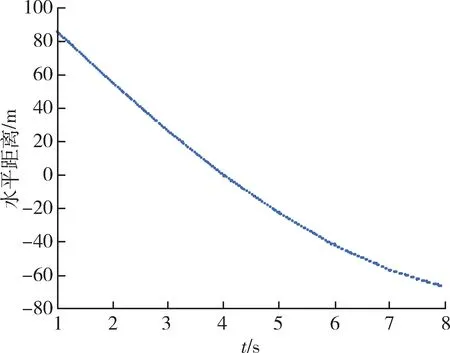
圖5 潛艇與魚雷水平距離關系圖Fig. 5 Changing relationship diagram of horizontal distance between the submarine and the torpedo
仿真過程中,潛艇與魚雷的初始距離是以魚雷旋回半徑為邊界值,在此設定魚雷的旋回半徑為117 m,根據魚雷和潛艇航速,在時間軸上設置一定時間間隔,仿真初始距離由邊界值向兩側分別進行仿真計算。時間間隔以1 s 為例,仿真的初始距離間隔為23 m,則分別仿真潛艇與魚雷初始距離為140,117,94 m 時的位置關系,如圖6所示。
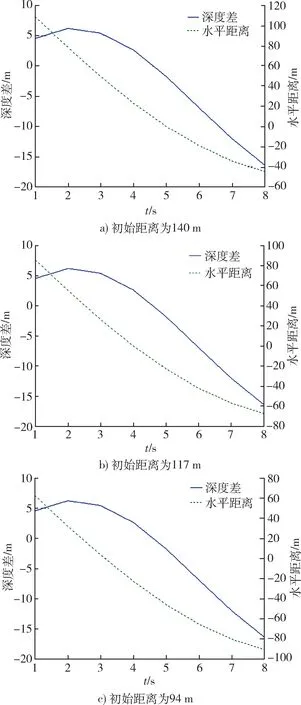
圖6 潛艇與魚雷不同初始距離的位置關系圖Fig. 6 Relationship diagram of changing position between submarine and torpedo when the different distances
以上是以潛艇與魚雷的仿真初始距離為設定的魚雷旋回半徑及其邊界值兩側的3 個例子,進行仿真得出的水平和垂直位置關系圖,其他初始位置情況不再一一列舉。根據多次仿真結果,對潛艇和魚雷位于同一水平面時的水平距離ΔD1、當潛艇與魚雷位于同一垂直面時兩者的垂直距離ΔD2進行分析,其中ΔD1>0 表示潛艇位于魚雷旋回圈之外,ΔD1<0 表示潛艇位于魚雷旋回圈之內,ΔD2>0 表示潛艇位于魚雷上方,ΔD2<0 表示潛艇位于魚雷下方,具體不同情況如表1 所示。
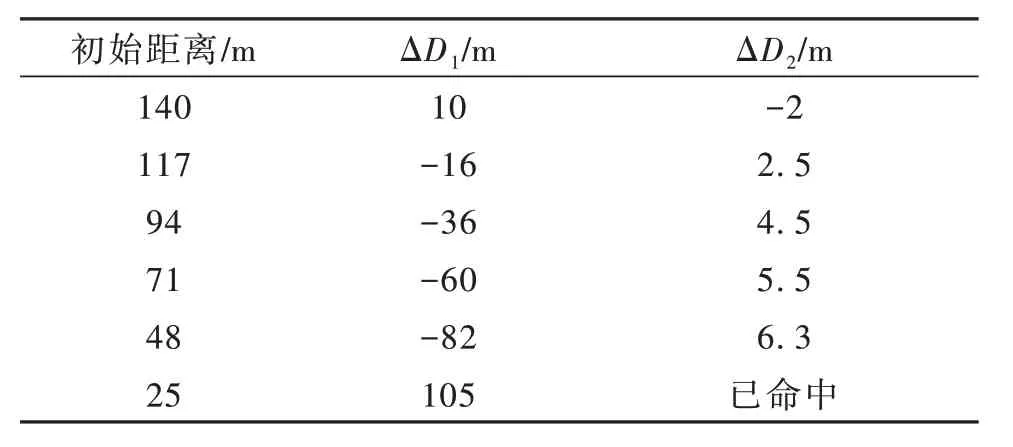
表1 不同初始距離對應的ΔD1 和ΔD2Table 1 ΔD1&ΔD2 by the different initial distances
3 仿真結果分析
通過對已設定的模型參數進行仿真,再結合潛艇與魚雷的相對運動態勢,可以分析出潛艇采用強機動變深規避魚雷末端攻擊彈道的仿真結論。分別剖析潛艇在垂直面和水平面的規避效果,然后明確應用仿真結論時應注意的問題。
3.1 仿真規避效果分析
從表1 中可以看出:在垂直面上,當設置潛艇與魚雷的初始距離為140 m,潛艇和魚雷運動至同一垂直面時,ΔD2為-2 m,即艇雷的初始距離在140 m以上時ΔD2為正值,潛艇位于魚雷下方,此時潛艇已不能靠快速上浮來擺脫魚雷的追蹤。同理,當設置初始距離為117,94,71,48,25 m 時,ΔD2>0,即潛艇位于魚雷上方,此時,若ΔD2大于魚雷近炸引信探測距離d,滿足引信不被擊發的條件,此時在垂直面上是符合規避要求的。
而在水平面上,潛艇能夠成功規避魚雷的末端追蹤彈道需要同時滿足以下條件:①要求潛艇位于魚雷的旋回圈內,即ΔD1<0;②需要考慮艇雷之間水平距離ΔD1與潛艇艇長L之間的關系;③初始距離要大于仿真間隔距離和魚雷近炸引信探測距離之和。特別是當魚雷和潛艇位于同一深度時,只有當兩者的水平距離大于艇長,即|ΔD1|>L,即整個潛艇位于魚雷旋回圈之內才能有效規避魚雷的彈著點。以潛艇艇長為80 m 為例,則仿真過程中的初始距離為48 m 時,可以達到成功規避的效果。
3.2 仿真結論應用說明
以上仿真結論是在未考慮艇指揮員下達口令與操縱裝備時間誤差的情況下進行的。在實際驗證或戰時采取該規避方案時,還應當考慮將潛艇指揮員下達口令時間和操作人員執行命令時間計算在內。也就是說,潛艇開始進行規避機動與指揮員下達速浮指令之間有一段時間間隔,在潛艇采用強機動規避魚雷的時機初始距離應當為此段時間內兩者的相對航程與仿真結果的初始距離之和。當艇指揮員在合適的距離上,下達供氣速浮口令,采用強機動規避魚雷攻擊末端彈道時,在理論上是可以有效規避魚雷攻擊的。
4 結束語
當潛艇與來襲魚雷已經處在較近距離(5 鏈以內),潛艇來不及使用對抗器材或純機動規避反潛魚雷無效時,應果斷采取強機動規避其攻擊的方案。通過仿真驗證得出其實施過程為:在一定距離范圍內,潛艇指揮員下達供氣速浮口令,利用高壓氣吹除全部或部分主壓載水艙的水,使潛艇大尾傾高速上浮至水面,隨后迅速下潛到淺水層完成規避機動。此方案只有當潛艇所在海域水面和空中反潛兵力威脅較小或有其他紅方兵力支援、潛艇處在較大深度航行且近距離發現來襲魚雷已跟蹤紅方潛艇時可以視情采取。在其他情況下,采取此方案時要慎重考慮,以避免潛艇迅速浮出海面被藍方其他兵力發現攻擊。
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57