通過(guò)算法減少可變阻尼減震器中傳感器的使用數(shù)量
2024-03-24 10:44:55徐忠義張倫維石楊斌
時(shí)代汽車 2024年2期
徐忠義 張倫維 石楊斌
摘 要:本文主要研究了通過(guò)軟件計(jì)算來(lái)減少汽車可變阻尼減震器(CDC)的傳感器數(shù)量的可行性。CDC可變阻尼減震器通常需要多個(gè)位移傳感器和多個(gè)加速度傳感器,同時(shí)會(huì)需要車載慣性測(cè)量單元(IMU)和車載自適應(yīng)大燈高度信號(hào)進(jìn)行分析處理。這里主要研究了兩種方案:1、通過(guò)位移傳感器和IMU的信號(hào)推算出加速度傳感器的信號(hào),從而取代加速度傳感器;2、通過(guò)車身的6自由度IMU和大燈高度信號(hào)取消所有加速度和位移傳感器。減少更多的傳感器會(huì)著降低更多的成本,傳遞到市場(chǎng)就可以使更多的用戶在在自己可以接受的價(jià)格區(qū)間享受更好的駕駛體驗(yàn)。然而減少更多的傳感器很可能提高了產(chǎn)生更多的誤差的概率。這篇文章通過(guò)MATLAB進(jìn)行仿真、構(gòu)建算法模型和采集實(shí)車信號(hào)從而評(píng)估減少傳感器數(shù)量的可行性。
關(guān)鍵詞:CDC減震器 傳感器 控制算法 信號(hào)轉(zhuǎn)換
1 引言
減震器是汽車底盤(pán)很重要的組成部分,影響汽車的垂向運(yùn)動(dòng)。普通的被動(dòng)減震器由于阻尼力不可控制,很難兼容平衡汽車運(yùn)動(dòng)的舒適性和運(yùn)動(dòng)性。為了兼具運(yùn)動(dòng)性和舒適性,目前CDC半主動(dòng)減震器可以實(shí)時(shí)改變減震器的阻尼來(lái)適應(yīng)各種路況和個(gè)性化的駕駛習(xí)慣。幾年前CDC可變阻尼控制減震器只會(huì)配置在中高端車型上。隨著硬件的更新和成本的降低,這套系統(tǒng)逐漸應(yīng)用于價(jià)格區(qū)間更低的車型,覆蓋更廣泛的用戶。因此考慮節(jié)約生產(chǎn)成本是值得研究的事情。通過(guò)軟件算法的彌補(bǔ),用數(shù)量更少的傳感器得到同樣的信號(hào),是可以根據(jù)車身結(jié)構(gòu)通過(guò)姿態(tài)算法,微分積分等方法去計(jì)算的。然而實(shí)際情況每個(gè)傳感器會(huì)存在誤差和延遲。另外,在本身有誤差的信號(hào)的基礎(chǔ)上進(jìn)行計(jì)算處理會(huì)產(chǎn)生更大的誤差。本文會(huì)在CDC天棚算法的基礎(chǔ)上探索如何通過(guò)算法計(jì)算取代傳感器的方法,以及通過(guò)產(chǎn)生誤差的大小來(lái)評(píng)估方案的可行性。首先,通過(guò)應(yīng)用已有的位移傳感器和IMU傳來(lái)的信號(hào),取代加速度傳感器。進(jìn)而研究應(yīng)用一個(gè)車身6自由度的IMU去取代所有加速度傳感器和位移傳感器,這樣會(huì)應(yīng)用到更多的計(jì)算方法,包括卡爾曼濾波去提高計(jì)算精度。
2 方案
2.1 模型建立
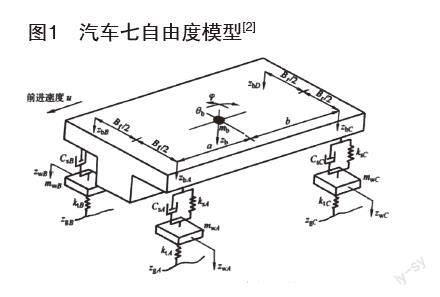
首先,建立汽車的物理結(jié)構(gòu)模型,以此基礎(chǔ)進(jìn)行算法的研究。這個(gè)部分我們引用了一個(gè)7自由度的汽車模型,把汽車車身當(dāng)成一個(gè)剛體,另外包括汽車垂向的彈簧和減震器自由體受力圖。
如圖1所示,假設(shè)車身為一塊剛體,四角分別布置彈簧和減震器,A、B、C、D四點(diǎn)分別代表四個(gè)減震器系統(tǒng)所承受的震動(dòng)來(lái)自車身垂向,俯仰側(cè)傾這三自由度的影響。假設(shè)A,B,C,D 四處簧上配備加速度傳感器和位移傳感器,車體的上配備一個(gè)六自由度的IMU可輸出車身的垂向加速度、俯仰角速度、側(cè)傾角速度。無(wú)加速度的算法中主要通過(guò)位移傳感器的二次求導(dǎo),濾波和權(quán)重對(duì)比經(jīng)計(jì)算過(guò)的IMU傳來(lái)的加速度信號(hào)設(shè)計(jì)去計(jì)算加速度傳感器的信號(hào)。無(wú)位移和加速度傳感器算法需要更復(fù)雜的計(jì)算方法,包括振動(dòng),俯仰,側(cè)傾導(dǎo)致的垂向的力分析。下邊是在對(duì)減震器垂向分析所需要的公式用作對(duì)信號(hào)的處理與計(jì)算,并做出仿真結(jié)果分析。
IMU可輸出車身的垂向加速度、俯仰角速度、側(cè)傾角速度,通過(guò)計(jì)算可分別計(jì)算出A、B、C、D四點(diǎn)垂向振動(dòng)加速度函,因此可采用IMU信號(hào)替換加速度傳感器。
車身垂向主要受四處減振器阻尼力和螺旋彈簧力的作用,車身受力可以由減震器受力和彈簧受力疊加組成。IMU傳出的信號(hào)信息根據(jù)動(dòng)力學(xué)運(yùn)動(dòng)方程式可以分別算出簧上的受力情況FA、FB、FC。再算出加速度信息。
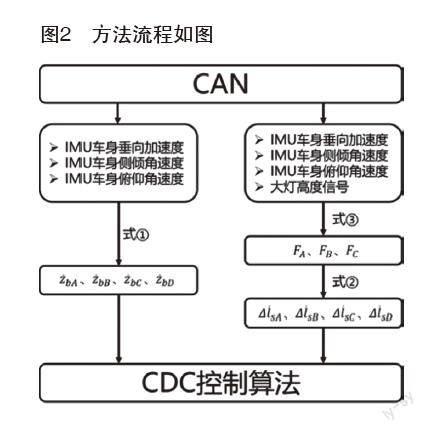
上圖2是無(wú)加速度和位移傳感器方法通過(guò)從CAN里傳出IMU和大燈高度信號(hào)去計(jì)算出原有配置的加速度和位移傳感器提供的信息的方法流程圖。用算出的信號(hào)信息去代替原有傳感器的信息輸入到CDC控制系統(tǒng)里。
2.2 無(wú)加速度傳感器算法:
在實(shí)車上采集一段路程的數(shù)據(jù),首先將這段路程的數(shù)據(jù)放在CDC的天棚控制算法里,一組輸入為正常的位移傳感器和加速度傳感器的信號(hào),另一組為只有位移信號(hào)輸入,加速度信號(hào)通過(guò)位移傳感器的信號(hào)和IMU發(fā)出的信號(hào)綜合計(jì)算出。通過(guò)下面兩組圖可見(jiàn)兩組數(shù)據(jù)幾乎保持一致。
2.3 無(wú)加速度傳感器算法:
應(yīng)用相同的數(shù)據(jù),對(duì)比加速度傳感器的垂向加速度和用IMU算出的垂向加速度。下圖紅色部分是加速度傳感器采到的信號(hào)經(jīng)過(guò)濾波處理后的數(shù)據(jù),黑色是用IMU得到的信號(hào)經(jīng)過(guò)計(jì)算和濾波得到的垂向加速度的數(shù)據(jù)。通過(guò)對(duì)比兩組數(shù)據(jù)非常接近,整個(gè)路段中是相同的走勢(shì)。不過(guò)也存在著一些不同,例如IMU算出的數(shù)據(jù)存在一定的偏移。另外在遇到高頻率振動(dòng)的時(shí)候明顯看出IMU算出的數(shù)據(jù)存在一些滯后性,當(dāng)回到低頻運(yùn)動(dòng)的時(shí)候,滯后有所降低。
圖7上方兩個(gè)信號(hào)的傅里葉變換圖,從圖中可以看出在低頻時(shí)波形相同,當(dāng)進(jìn)入了高頻IMU算出的信號(hào)波形明顯減弱了一些。
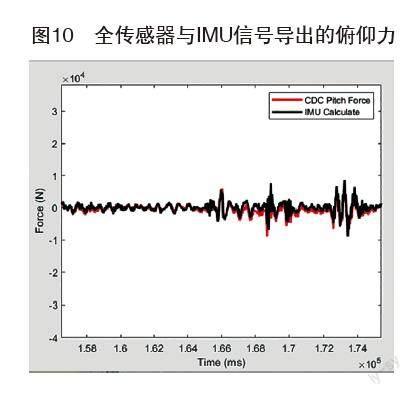
三幅圖:圖8,圖9,圖10分別是用原信號(hào)模擬出的垂向,側(cè)傾,俯仰所產(chǎn)生的阻尼力之和和用IMU算出的力進(jìn)行對(duì)比。在三幅圖中可以看出IMU算出的阻尼力和真是的原信號(hào)算出的阻尼力基本趨勢(shì)相同,但是也明顯能看出一些誤差。例如圖8的垂向阻尼力,明顯可以看出一些偏移,另外在高頻的波動(dòng)下誤差會(huì)變得明顯。
3 分析
從以上的仿真分析中,可以發(fā)現(xiàn)通過(guò)算法減掉四個(gè)加速度傳感器,在天棚算法里仍然可以很好的適配,盡管會(huì)存在一定的誤差,但是可以通過(guò)各種算法去進(jìn)行優(yōu)化和減小誤差。但是此方法局限于天棚算法,如果需要為汽車匹配更多功能,例如加上更具有運(yùn)動(dòng)性的地棚算法,取代加速度傳感器會(huì)有一定的影響。用IMU代替所有加速度和位移傳感器的方法則會(huì)更容易出現(xiàn)偏差和響應(yīng)延遲問(wèn)題。通過(guò)實(shí)車采集數(shù)據(jù)進(jìn)行仿真分析的結(jié)果表明,一些對(duì)比明顯存在較大的誤差,這些誤差是在理論之外的。如果在實(shí)際中進(jìn)行實(shí)車測(cè)試可能會(huì)產(chǎn)生更大的誤差。在特定的車型里應(yīng)用一些標(biāo)定的方法和增加卡爾曼濾波的方法可以提高理想控制的精度,但同時(shí)也提升了算法的難度。總體而言,無(wú)論是減少加速度傳感器還是去掉所有簧上的加速度和位移傳感器,都是可行的,這點(diǎn)通過(guò)基本的天棚算法上可以證實(shí)。盡管會(huì)存在少量的誤差、偏移和延遲,但后期可以通過(guò)標(biāo)定和濾波設(shè)計(jì)進(jìn)行優(yōu)化。不過(guò)減少傳感器數(shù)量的方法也限制了整體功能。
4 結(jié)論
隨著傳感器的發(fā)展,其精度及頻率越來(lái)越高,目前在理論上,傳感器已經(jīng)可以通過(guò)軟件算法取代。但是算法結(jié)果的精度誤差和延遲無(wú)法避免,具體的延遲數(shù)據(jù)需要更多的實(shí)車檢驗(yàn)。另外,在無(wú)加速度和位移傳感器算法里IMU的位置布置和信號(hào)傳遞頻率也會(huì)對(duì)結(jié)果產(chǎn)生很大的影響。同時(shí),減震器閥門(mén)本身會(huì)存在一定的滯后性,軟件算法層面上的滯后可能對(duì)實(shí)際效果影響不大。集中天棚算法可以達(dá)到一定的效果,大部分低價(jià)區(qū)間的車型主要以舒適性為主,五傳感器的算法理論上可與提高汽車的舒適性。減少傳感器在傳感器信號(hào)失真的情況下確實(shí)會(huì)增加風(fēng)險(xiǎn);多傳感器的情況下,在某一傳感器出現(xiàn)誤差時(shí),可以通過(guò)其他傳感器在短時(shí)間內(nèi)進(jìn)行矯正。隨著硬件的不斷優(yōu)化,傳遞頻率提高,在未來(lái)IMU算法的精度會(huì)有很大的提升,這也會(huì)提高IMU算法代替其他傳感器的可行性。
參考文獻(xiàn):
[1]余志生.汽車?yán)碚?第5版機(jī)械工業(yè)出版社2009.
[2]喻凡 . 汽車系統(tǒng)動(dòng)力學(xué).第2版機(jī)械工業(yè)出版社2017.
[3]Kicheol Jeong, Seibum B.Choi,. Vehicle Suspension Relative Velocity Estimation Using a Single 6-D IMU Sensor. IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY . 2019.
