基于模型不確定性自適應估計的工業機械臂改進TDE控制策略*
2024-03-26 05:58:14高舒芳
機電工程 2024年3期
高舒芳,張 文,吳 凱
(1.山西工程科技職業大學 智能制造學院,山西 晉中 030619;2.太原理工大學 機械與運載工程學院,山西 太原 030024;3.合肥通用機械研究院有限公司,安徽 合肥 230031)
0 引 言
工業機械臂是數智化時代先進制造業中的關鍵執行單元,其被廣泛應用于汽車零部件制造[1-2]、高精密電子元器件制造[3]、光學元件精密制造[4]等領域。對機械臂進行高精度、強魯棒性的運動控制是工業機械臂有效服役的關鍵前提。
工業機械臂動力學包含了重力、科氏力、離心力、摩擦力和其他干擾項,是一種高度非線性系統,因此,機械臂的精確運動控制難度極大。過去幾十年來,國內外學者廣泛開展了基于模型的機械臂運動控制方法研究[5-8],取得了良好的效果。然而,由于識別機械臂動力學參數存在很大難度,且模型參數的數量隨著機械臂自由度的增大而顯著增加,因而大多數基于模型的機械臂運動控制器都非常復雜,且對參數變化非常敏感。
為避免上述控制方法(基于模型控制)的缺陷,近年來國內外學者廣泛研究了智能化的無模型機械臂控制方法[9]。
VO A T等人[10]設計了固定時間滑模控制律,同時結合徑向基神經網絡,估計了機械臂動力學特性的不確定項,其可以有效控制抖振現象的產生。DENG Fu-wei等人[11]引入了無模型控制思想,建立了機械臂動力學超局部模型,并利用時延估計逼近超局部模型中的未知項,最后設計了改進的滑模控制律,在完成精確位姿控制的同時減小了控制器抖振。王建平等人[12]提出了一種基于深度強化學習的機械臂運動控制方法,進行了二連桿機械臂無模型數據驅動控制,該方法具有高效、適應性強的優點。
基于時延估計的控制(time-delayestimation-basedcontrol,TDEC/TDC)是一種能夠對存在外部擾動和模型不確定性的非線性復雜系統進行有效控制的無模型方法,其具有簡單、高效和強魯棒性的優點,被廣泛應用于工業機械臂控制領域[13-16]。TDEC方法基于樣本延遲信息對未知的動力學參數和模型不確定性進行建模和消減。實際應用證明,被控系統越復雜、不確定程度越高,TDEC方法的控制效果越顯著[17]。
然而,當系統摩擦力、有效載荷或軌跡等存在突變時,采用TDEC會存在較大估計誤差(即“TDE誤差”),因此,許多學者將輔助控制器集成到TDE控制器中,開展了廣泛的研究。
LEE J等人[18]提出了一種基于自適應積分滑模控制和TDE的魯棒控制器,采用TDE來估計具有參數變化和干擾等不確定性的機械臂動力學響應,并采用積分滑移面替代了傳統滑模控制中的到達相位和噪聲敏感切換動作,控制效果魯棒性較強。KIM J等人[19]基于TDE方法設計了模糊PID控制器,并證明了在離散時域內,所提出的模糊PID控制器是TDE控制器的擴展集,最后利用PUMA型機械臂驗證了該控制器的有效性。WANG Yao-yao等人[20]將TDE與分數階非奇異終端滑模控制相結合,提出了一種新的非線性自適應控制律,其具有穩定性高、控制精度好的優勢。
但是,現有的多數方法采用了傳統的TDEC技術,因此,控制效果在很大程度上依然受到TDEC方法的限制,無法較好地平衡TDE誤差和控制輸入抖振現象,尤其是當系統受到間歇性擾動或存在較大不確定性時,已有基于TDEC方法的控制策略容易出現嚴重問題。文獻[21]、[22]試圖通過在每個采樣點尋找適當的TDEC控制增益來解決上述問題,但控制效果的不確定性依然較大。
基于TDEC方法的上述缺陷,筆者提出一種改進的TDEC方法,即將模型不確定性自適應估計器集成到經典TDEC中,并融合滑模控制,形成完整的多級控制策略框架,對機械臂輸入扭矩進行魯棒控制;利用Lyapunov方法對改進的TDEC控制策略的穩定性進行證明;最后,通過仿真分析和實驗的方式,以此來驗證該控制策略的有效性和優越性。
1 多自由度機械臂TDEC方法
1.1 多自由度機械臂動力學模型
具有n自由度的機械臂動力學方程可表示為:
(1)
(2)
上述動力學系統式(1)滿足如下性質和假設[24]。

(3)
式中:‖·‖為矩陣誘導范數運算符。
(4)

(5)
式中:Fc為庫倫摩擦系數;Fv為黏滯摩擦系數;sgn(·)為符號函數。
1.2 機械臂TDEC方法基礎
(6)
式中:Nt為集總不確定性擾動項,表示為:
(7)
為消去式(6)中的Nt,將控制輸入力矩表示為:
(8)

上述誤差控制項ut如下所示:
(9)
式中:qd,t為機械臂關節參考軌跡(轉角)向量;et為軌跡跟蹤誤差向量;Kd,Kp為常系數對角陣,Kd=diag(kd,11,…,kd,nn),Kp=diag(kp,11,…,kp,nn)。

(10)
式中:L為采樣周期。
將式(8)和式(10)代入式(6),得到:
(11)

對于TDE誤差Γt,當其滿足下式的穩定性條件[16]1711-1712時,有Γt<Γ*(Γ*為常向量),此時跟蹤誤差et收斂,公式如下:
(12)
式中:I為單位矩陣。

由此可見,基于TDE的控制方法總是存在TDE誤差與抖振之間的權衡。
基于TDE控制方法的權衡曲線示意圖如圖1所示。
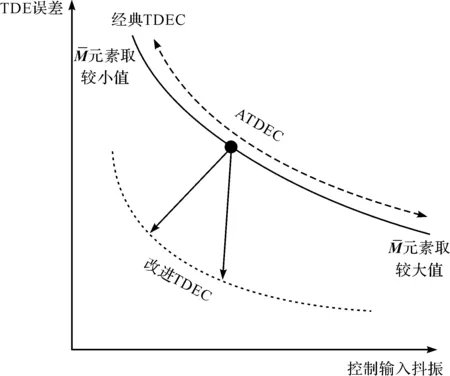
圖1 基于TDE控制方法的權衡曲線示意圖
由圖1可知:由于采用了固定的控制增益,經典TDEC的控制效果為權衡曲線上的固定點;而自適應TDEC(adaptive time-delay estimation based control,ATDEC)的控制效果動態權衡TDE誤差和控制輸入抖振之間的相對值。
因此,筆者的目的是在已有方法的基礎上,通過引入模型不確定性自適應估計,同步降低TDE誤差和控制輸入抖振,從而實現更為優良的基于TDEC的機械臂軌跡控制目的。
2 模型不確定性自適應估計方法
對工業機械臂進行控制的目標是使其關節實際軌跡能夠精確跟蹤期望的參考軌跡。
為設計一種能夠有效減小跟蹤誤差的自適應控制方法,筆者引入了滑動變量。對于滑動變量st∈Rn,采用如下線性滑模面:
(13)
式中:Λ為正定對角陣,Λ=diag(Λ11,Λ22,…,Λnn),Λ決定了跟蹤誤差在滑模流形上收斂于0的速度。

2.1 模型不確定性自適應估計器設計
參考式(10),針對Nt設計了如下基于延遲信號及其梯度的自適應估計模型:
(14)
式中:Wt為梯度效應調節系數矩陣,Wt=diag(W11,t,…,Wnn,t)∈Rn×n。
基于引入的滑模變量,Wt的元素由如下公式進行自適應計算:
(15)

綜合式(8)、式(13)及式(14),給出如下輸入力矩的控制律:
(16)
式中:Ks為開關增益矩陣,且Ks=diag(ks,11,…,ks,nn)。
將式(16)代入式(6),得到如下所示的誤差動力學方程:
(17)

與經典的TDEC相同,該控制方案的第一輔助控制器起到了穩定名義模型式(6)的作用,而第二輔助控制器則起到進一步抑制殘余誤差、穩定控制效果的作用。

此外,因為TDE控制器相互獨立,所以模型不確定性自適應估計器能夠進一步集成到自適應TDEC方法中,形成更為有效的控制策略。
最后,雖然改進的TDEC控制方法依然在TDE誤差與控制輸入抖振現象之間進行權衡,但權衡曲線相較于基于經典TDEC方法更低。
改進的TDEC控制算法整體結構如圖2所示。
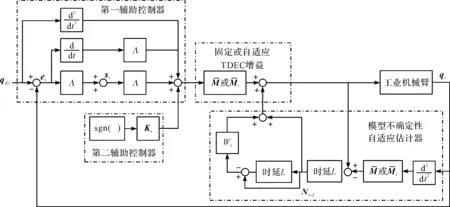
圖2 改進的TDEC控制算法整體結構
2.2 穩定性分析
筆者為說明改進的TDEC控制方法的穩定性,考慮如下的Lyapunov函數:
(18)
對上式取時間導數,并將式(17)代入,可得出:
(19)


首先,根據式(9)和式(11),TDE誤差Γt可以改寫為:
(20)
根據文獻[25]中的方法,關于Γt的閉環動力學方程可表示為:
(21)
其中:
(22)
因此,當時延L足夠小時,上述η1,t和η2,t為有界量。結合條件式(12),可以得出TDE誤差Γt有界。



(23)
因此,可以得出:
(24)
由上述過程可以看出,TDE誤差Γt以及Wii,t均有界,此時有:

W+·Γ*
(25)



(26)
將開關增益ks,ii設置為:
(27)
則有:
(28)


(29)
綜上,對于非零si,t,Lyapunov函數的時間導數總為負。因此,當式(12)和式(27)成立時,可以保證閉環系統在滑模面st=0上漸近穩定。此外,算法的調節參數γii決定了Lyapunov函數的收斂速度。
2.3 參數調節策略
針對改進的TDEC控制方法,筆者設計了如下的參數調節策略:
步驟1。確定第一輔助控制器中的Λ,使下述特征方程具有所期望的極點:
(30)
值得注意的是,根據標準的二階系統理論,可以選擇式(30)中的兩個極點,以獲得理想的上升時間、調節時間、超調量等;


步驟4。選擇式(16)中第二輔助控制器的ks,ii。由于ks,ii的取值同時影響跟蹤性能和抖振效應,而自適應時延估計在一定程度上保證了跟蹤性能,因此,可以選擇較小的ks,ii值以避免抖振。
3 仿真分析
筆者采用簡化版三連桿PUMA型機械臂[26]進行了仿真分析。
仿真機械臂構型及其參數如圖3所示。
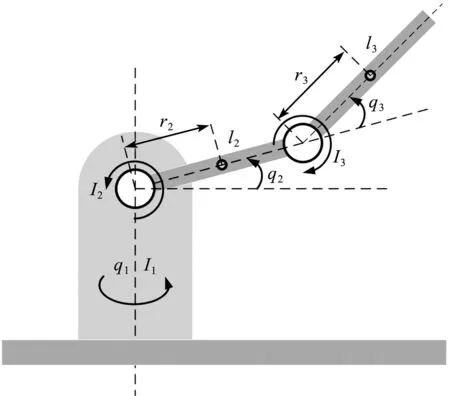
圖3 仿真機械臂構型及其參數
仿真機械臂動力學參數如表1所示。
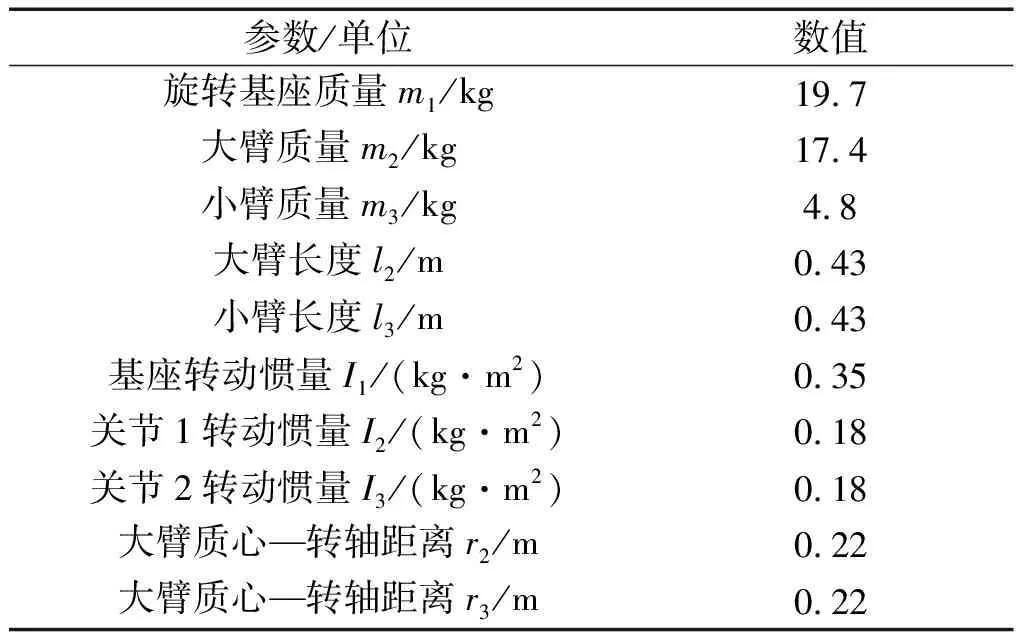
表1 仿真機械臂動力學參數
仿真案例中給定的參考關節軌跡為qd,t=[sin(t),cos(t),0.8·sin(t)],采樣周期L為1 ms,仿真時間為30 s。


仿真分析在如下兩類條件下開展:
1)變頻條件。為證明改進的TDEC算法的有效性,令參考軌跡頻率在12 s后增大為原值的二倍;
2)變載荷條件。利用前述變頻條件下的參考軌跡,在10 s~12 s之間對機械臂施加5 kg載荷。
為定量評價控制性能和抖振,筆者計算了跟蹤誤差的均方根值(root mean square value of error,RMSE)和測量能耗的平方值積分(integral square value,ISV)。其中ISV的計算公式為:
(31)
式中:T為計算時間。
為節省篇幅,此處筆者僅針對末端關節的跟蹤誤差和抖振情況進行分析。
各方法對于末端關節控制的跟蹤誤差對比曲線如圖4所示。
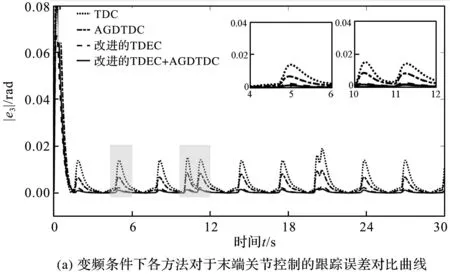
圖4 各方法對于末端關節控制的跟蹤誤差對比曲線
仿真分析中,各方法的RMSE和ISV定量對比結果(RMSE/ISV)如表2所示。

表2 仿真分析中各方法的RMSE和ISV定量對比結果(RMSE/ISV)
由圖4及表2可以看出:改進的TDEC算法不僅優于經典的TDEC方法,而且控制輸入抖振也顯著降低。同時,即使參考軌跡變化頻率或有效載荷發生變化,在不失魯棒性的情況下,改進的TDEC算法依然可以獲得較小的跟蹤誤差。此外,與AGDTDC方法相比,集成了模型不確定性自適應估計器的改進AGDTDC獲得了更好的軌跡控制效果。因此,改進的TDEC算法具有良好的靈活性。
然而,改進的AGDTDC的輸入抖振較高,這是因為AGDTDC在提高控制精度與抑制輸入抖振的權衡中選擇了前者。
4 實驗驗證
為了進一步驗證改進的TDEC算法的實用性,筆者采用六自由度Indy-7機械臂進行了實驗[29]。
機械臂質量為28 kg,其中關節1~3的電機齒輪比為1∶121,關節4~6的電機齒輪比為1∶101,角度測量采用16位編碼器,重復性為100 μm。
在不失一般性條件下,實驗過程僅針對關節1~3進行控制。為了施加扭矩,第一、第二軸和第三關節分別使用了兩臺PUCK驅動器,驅動器可產生的額定扭矩分別為117.73 N·m和47.5 N·m,最大峰值扭矩分別為431.97 N·m和193.27 N·m。采樣周期L為0.25 ms。控制算法在Ubuntu 12.04上采用C++編寫,計算出的信號通過CAN總線傳輸到采用轉矩模式控制的PUCK驅動器中。同時,實驗在加載/零載兩種條件下進行,實驗時間為30 s。
實驗采用的機械臂控制系統框圖如圖5所示。
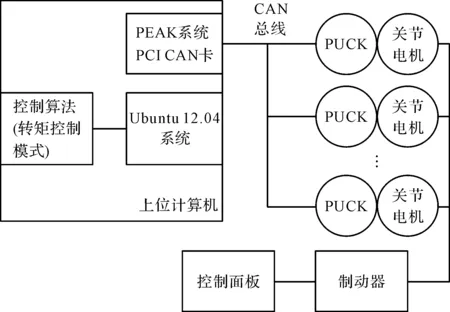
圖5 實驗采用的機械臂控制系統框圖
Indy-7機械臂的結構及關節期望軌跡如圖6所示。

在未施加有效載荷的條件下,改進的TDEC方法與經典TDC的控制效果對比如圖7所示。
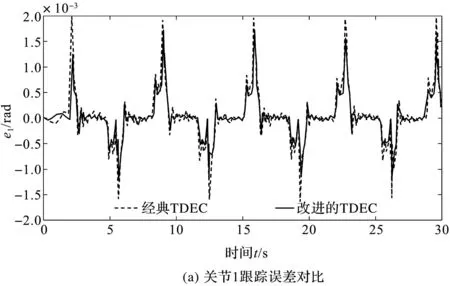
圖7 未施加有效載荷的條件下改進的TDEC方法與經典TDEC的控制效果對比
在施加有效載荷條件下,各方法的控制效果對比(以關節1為例)如圖8所示。
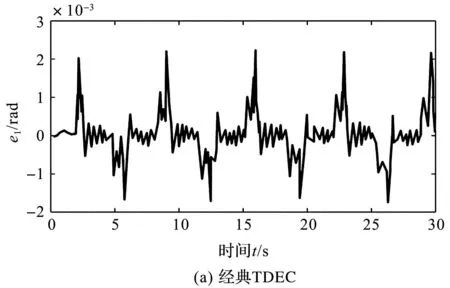
圖8 施加有效載荷下各方法的控制效果對比(以關節1為例)
實驗中各方法控制誤差RMSE(未加載/加載)定量對比結果如表3所示。
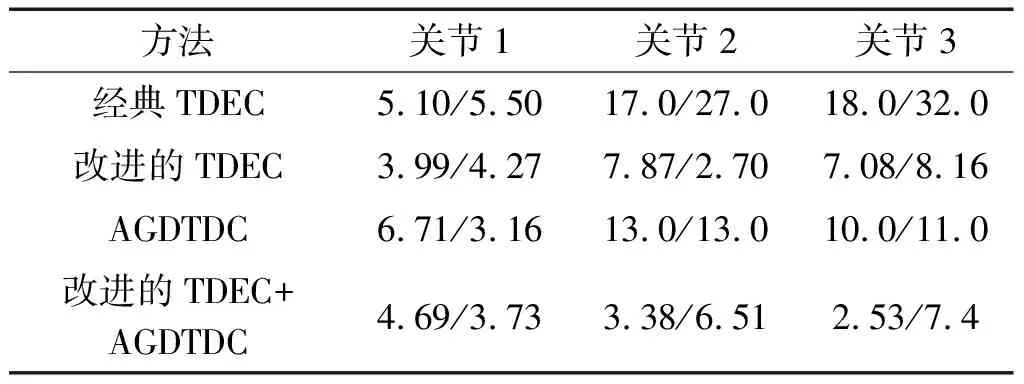
表3 實驗中各方法控制誤差RMSE(未加載/加載)定量對比結果
實驗中各方法控制過程中(未加載/加載)測量計算的ISV定量對比結果如表4所示。

表4 實驗中各方法控制過程中(未加載/加載)測量計算的ISV定量對比結果
由圖7、表3及表4可以看出:在未對機械臂施加有效載荷的條件下,改進的TDEC方法的軌跡控制性能優于經典的TDEC及AGDTDC方法;通過對TDEC方法分別與TDC、AGDTDC兩種方法的數據對比分析,分別計算了三個關節軌跡控制精度提升的百分比,再求三個百分比的平均值,改進TDEC方法相較于經典TDEC、AGDTDC兩種方法對于三個關節的軌跡控制精度平均分別提升了45.38%及36.40%。這是由于改進的TDEC方法在經典TDEC方法基礎上完成了更有效的模型不確定性估計任務。同時,與已有AGDTDC方法相比,改進的AGDTDC方法的軌跡控制性能更為優良,且輸入抖振抑制效果也有所提升,說明了改進的TDEC模型不確定性自適應估計器的靈活性與有效性[30-31]。
5 結束語
筆者提出了一種基于模型不確定性自適應估計的改進TDEC方法,并利用Lyapunov理論分析了該控制策略的穩定性,最后通過仿真分析和實驗驗證了改進的TDEC方法的有效性和優越性。
結論如下:
1)模型不確定性自適應估計器充分考慮了機械臂動力學模型擾動項的時延估計值及其梯度,將其與TDE控制器結合,能夠有效提升控制精度并減少控制輸入抖振現象。實驗結果表明,在相應降低控制輸入抖振程度的同時,在機械臂三個關節未加載/加載的條件下,相較于經典TDEC方法,改進的TDEC控制策略的控制精度平均分別提高了45.38%及62.29%;相較于AGDTDC方法,該控制策略的控制精度平均分別提高了36.40%及23.31%;
2)基于TDE的控制方法均不可避免地需要在控制精度與輸入抖振現象間進行平衡;相較于經典TDEC以及已有的AGDTDC方法,改進的TDEC控制方法的平衡曲線更低;
3)改進的TDEC模型不確定性自適應估計器與TDE控制器相對獨立,能夠有效地與已有自適應TDC方法相結合,并取得更為良好的控制效果。
在后續研究中,筆者將圍繞改進的TDEC模型不確定性自適應估計方法與其他控制技術相結合,為高度不連續、非線性系統提供更為有效的控制方案。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
Coco薇(2016年2期)2016-03-22 02:42:52
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
Coco薇(2015年1期)2015-08-13 02:47:34