基于單線全向激光雷達的碎石樁機周界闖入預警系統設計及驗證
2024-03-30 13:54:40舒方法陳韜陳曦
中國港灣建設 2024年3期
舒方法,陳韜,陳曦
(1.中交第三航務工程局有限公司,上海 200032;2.中交上海三航科學研究院有限公司,上海 200032)
0 引言
目前國外大型機械設備的遠程監控研究,主要是遠程監控設備的運行狀態,并利用大數據分析技術,統計故障類型,分析故障原因,改進生產工藝。近年來,由于國家對現場作業施工安全的重視,國內一些公司有針對性地設計開發了一些大型機械的安全監控系統,主要集中起重機等吊裝作業設備,但這些系統的功能大多局限在設備過載情況下的制動功能。作為地基處理的重要施工機械,碎石樁機是一種常用于建筑工地上的重型機械,它在施工現場的作業區域通常是以公共交叉作業區域的形式出現的,因此,在作業過程中,其機械作業半徑及周邊會存在大量的不可預知的危險隱患因素。
目前對碎石樁機數字化監測研究主要在其生產工作狀態和質量控制參數的監測[1],對于碎石樁施工過程中的作業安全研究較少[2];目前市面上預警的措施主要有:通過攝像機流媒體分析進行周界預警[3]、通過物聯網無線傳感網絡技術構建警戒預警網絡[4]或者通過振動的方式進行預警[5]等,這些方法各有利弊和適用局限性。
針對碎石樁機作業現場的特殊環境和施工單位對經濟性的要求,本文提出了一種基于單線全向激光雷達的預警方法,在碎石樁機作業期間,可以對進入危險區域的人員或者物體進行自動識別、預警,必要時采取相應的預警措施,防止安全事故發生,確保施工安全[6]。
1 系統設計
1.1 系統總體設計思路
在本系統設計中,通過單線雷達來實現復雜現場環境的全向掃描,點云數據的濾波處理、配準融合處理,預警系統的可靠性都是本系統設計的關鍵問題。本系統利用單線全向激光雷達進行數據采集,并通過特定的濾波算法處理噪點數據,通過點云配準算法構建高精度、高適應性的環境模型,通過系統實現自動分級預警,并能夠向服務器端推送預警數據,支持多機數據匯總、分析和管理。
系統總體的設計思路如圖1 所示,系統架構最底層為終端激光雷達,通過對單線激光雷達裝置進行設計以實現全方位的掃描功能,激光雷達將掃描的點云數據通過zigbee 協議傳輸給上位機,由上位機系統進行數據處理,主要包括:獲取激光雷達數據、系統濾波、環境建模、提取物體位置信息及計算安全距離、觸發自動預警等流程,上位機將指令發送至下位機,下位機控制現場報警器報警和機械設備運行狀態;上位機可以通過4G/5G 無線傳輸報警數據至后臺服務器端,然后通過系統平臺可以實現報警數據的統計、分析和管理。
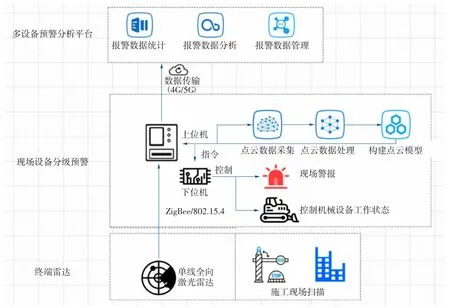
圖1 雷達預警系統架構圖Fig.1 Radar early warning system architecture diagram
1.2 系統主要功能設計
1.2.1 雷達裝置
單線全向激光雷達是一種利用單一線激光束實現全向掃描的激光雷達,它類似于普通的2D激光反射式雷達,設備采用機械旋轉結構原理,以高速旋轉來實現全向掃描。通過在高速電機驅動的旋轉平臺同軸點位上,安裝單向激光雷達傳感器,激光線束繞水平方向旋轉,實現對周圍環境的全向掃描[7]。
單線全向激光雷達裝置的結構安裝如圖2 所示。系統工作時,激光雷達傳感器通過單一線激光束進行掃描,并測量它所碰到的每個物體的距離和方向。由于旋轉平臺的旋轉,傳感器可以在全向作業面上往復完成周期性測量作業[8]。這些具有連續性、同類性的測量數據結果經過去噪[9]和濾波[10]處理后,可以被上位機系統用于建立碎石樁機周界環境模型,實現障礙物檢測和避障控制等應用。

圖2 單線全向激光雷達裝置的結構安裝示意圖Fig.2 Structural installation diagram of single line omnidirectional lidar device
1.2.2 設備安裝設計
為了確保激光雷達在檢測地面附近的人員或物體時檢測數據的完整性和準確性,安裝位置選擇在隱蔽處,安裝位置如圖3 所示。該位置于駕駛艙底部頂升油缸旁側的鏤空區域,設備倒置安裝在駕駛艙底部底盤上,激光雷達在水平面上進行掃描時,能覆蓋除4 根支腿及液壓錘外絕大部分扇形區域,還可以正常接收雷達的大部分激光反射,從而提高系統對入侵物體的檢測能力。同時在安裝過程中,為了規避因振動或意外碰撞導致雷達損壞的風險,采取了防震、防撞措施,使激光雷達設備在運行中能夠保持穩定且安全。
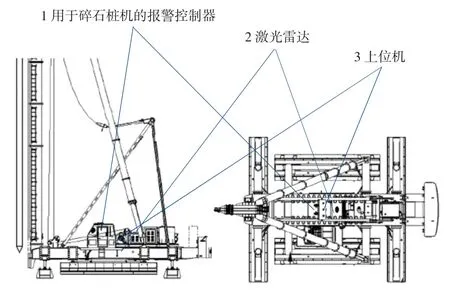
圖3 激光雷達及組件安裝位置圖Fig.3 Location diagram of lidar and component installation
1.2.3 掃描獲取數據
利用雷達周期旋轉特性與激光反射時間可以實現全向輪廓掃描與計算。系統研究將平面一周360°等分為16 組區域,每扇區域為22.5°,每扇區域包含150 個點云數據,每個點云數據包含一組長度數據和角度數據,數據利用UDP 協議傳輸,每組UDP 數據包含1 050 字節,數據結構見表1。
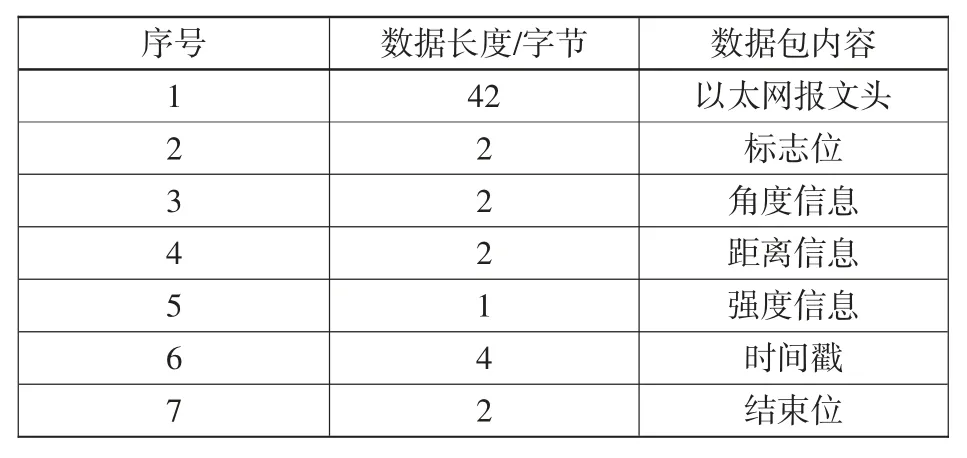
表1 激光掃描數據結構Table 1 Laser scanning data structure
由于系統實時性要求較高,考慮到數據傳輸、處理的時間延遲,確保系統在實際應用中及時準確,系統選取低功耗、低延遲的ZigBee/802.15.4通信協議將點云數據發送至上位機進行數據處理。
1.2.4 濾波系統設計
為了確保激光雷達的精度滿足周界闖入預警系統的要求,多次測量的數據通過統計學置信度計算,測量精度符合ISO/R(1938—1971)《公差和配合的IS0 系統·第2 部分:平面工件的檢驗》的相關規定,其統計置信度為95.4%(標準偏差σ 的±2倍),見圖4。此外,測量精度與測量條件有關,經過測試激光雷達的平均反射差可達±1.5 mm。在不利條件下(例如陽光直射)或在測量反射不良或非常粗糙的表面時,可能會出現最大偏差;對于30 m 以上的距離,測量精度可能會降低約±0.02 mm/m;因設備無法補償大氣環境的變化,如果在與20 ℃、相對濕度60%和大氣壓95.3 kPa 下測量遠距離(>150 m),這些變化也會影響精度。
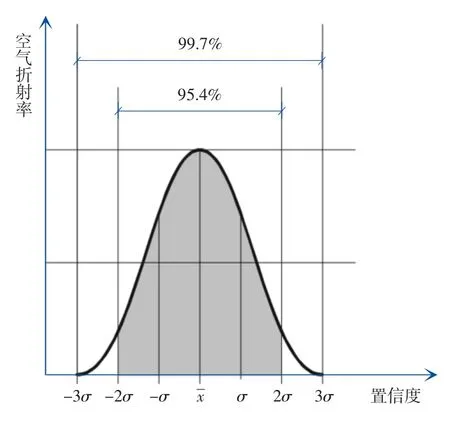
圖4 激光雷達反射置信度區間Fig.4 Lidar reflection confidence interval
為了補償數據中可能出現的異常激光飛點或因不利條件產生的偏差過大的點,在軟件數據處理機制中加入了針對原始點云數據的濾波算法,采用移動平均濾波器,濾波次數每周期10 次。在每個新的濾波周期中若存在新的測量值,則此值將被添加到篩選器值中,而最后一個值將被刪除,所有測量值除以濾波器位數的尺寸大小,結果作為濾波結果輸出,見圖5。
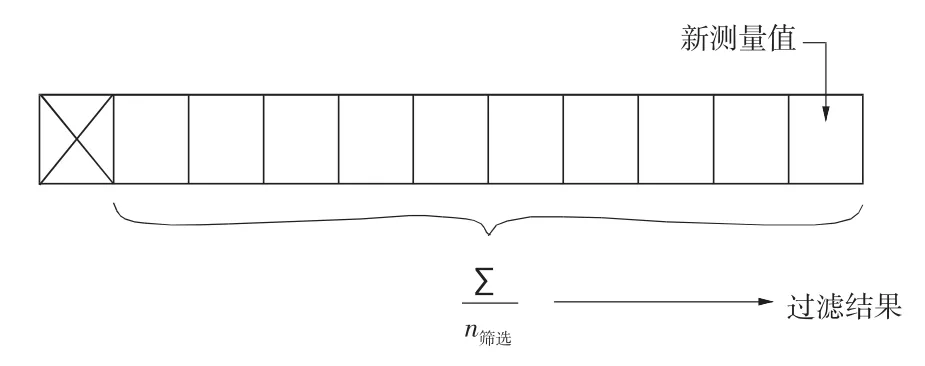
圖5 濾波器數據尺寸圖Fig.5 Filter data size diagram
通過周界預警軟件內部的尖峰抑制消除算法,統計濾波器值內的最小值和最大值,始終從平均值計算中刪除最小值和最大值,見圖6。
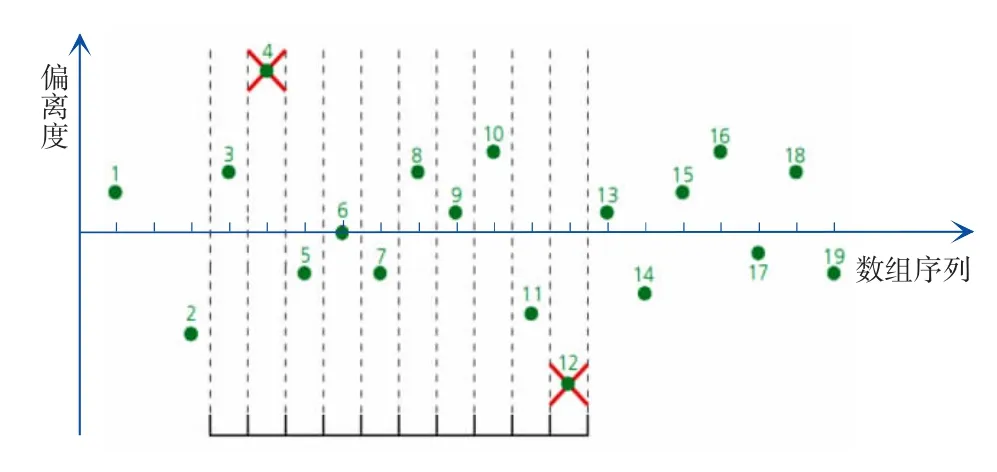
圖6 尖峰抑制消除算法圖Fig.6 Spike suppression elimination algorithm diagram
同時上述系統可抑制篩選值內的最大錯誤數,如果篩選值中的錯誤數小于指定值,則在輸出中不再顯示錯誤。
1.2.5 環境建模
環境建模是系統最重要的環節,首先使用點云配準算法將多個點云數據進行融合,并將點云數據轉換成環境模型,生成一個包含環境中物體位置信息的2D 平面圖。通過使用點云配準算法ICP(Iterative Closest Point)來實現,該算法可以計算兩組點云之間的最優變換矩陣,從而實現點云數據的融合和對齊。
ICP 核心算法:確定最小化目標函數,即所有對應點之間的歐式距離的平方和f(R,t)。
式中:Ps為源點云集合;Pt為目標點云集合;NP為對應點總數量;i為當前點的序號,i=1,2,3,…,NP;R為旋轉矩陣;t為平移矩陣。
1) 尋找對應點
通過確定源點云和初始目標點云可以構建初始點集合,計算初始旋轉矩陣和平移向量t,用初始的旋轉矩陣和平移向量對原始點云進行變換,得到一個變換后的點云。然后將這個變換后的點云與目標點云進行比較,只要2 個點云中存在距離小于一定閾值,就認為這2 個點是對應點,稱為最鄰近點對。
2) 求解R和t
用對應點對旋轉矩陣R與平移矩陣t進行估計,這里R和t中有6 個自由度,而對應點因存在多余觀測值使得數量很大,因此,可采用最小二乘等方法求解最優的旋轉矩陣R和平移矩陣t。
3) 迭代優化
基于優化后的R與t再次進行點云轉換,容易發現部分點云在轉換后的位置發生變化,一些最鄰近點對也相應的發生了變化,需要重復步驟2) 和3) 不斷進行迭代,直到滿足以下任一條件時停止迭代,生成2D 平面圖:
①R、t的變化量小于一定值;
②目標函數的變化小于一定值;
③鄰近點對不再變化。
1.2.6 提取物體位置信息及計算安全距離
將提取出物體位置信息后,采用歐氏距離公式計算物體中心位置至設定區域邊界的距離,與設定碎石樁機施工安全半徑進行對比,以確定是否有物體進入危險區域。
歐式二維空間公式:
式中:ρ 為點(x2,y2)與點(x1,y1)之間的歐氏距離;|X|為點(x2,y2)到原點的歐氏距離。
1.2.7 自動預警設計
在碎石樁機周邊環境無任何干擾的前提下,用激光雷達進行一次全向掃描,進行點云環境建模,生成固定的點云數據模板,并將數據存儲在數據庫中,形成激光雷達掃描周界,并根據現場情況可以人工設置周界禁入區域。正常使用時,系統生成的數據與固定的數據模板進行對比,根據比對結果進行自動分級預警,按危險等級分一級預警和二級預警,其中,一級預警是指只要有人或物體進入設定的區域即觸發;二級預警是指人或物體不僅進入設定的區域,且距離已低于設定的安全距離閾值。當觸發一級預警時,系統將發出聲光報警提醒操作人員;當發生二級報警時,系統不僅發出聲光報警提醒操作人員,同時還將發送指令啟動碎石樁機的緊急鎖定機制,確保施工現場安全。
2 系統可靠性分析
作為安全預警系統,系統的可靠性十分重要,需要通過多種手段確保系統穩定、準確的運行。
1) 精度驗證與標準化
激光雷達作為監測系統的核心組件,其精度直接決定了系統的可靠性。為確保激光雷達的測量精度,采用了統計學方法對其進行了嚴格的驗證。經過大量的實驗數據分析,確認激光雷達的測量精度符合ISO 國際標準,從而保證了輸出數據的準確性和可靠性。
2) 點云配準與環境捕捉
系統運用先進的ICP 算法進行點云配準,通過建立固定的數據模板,實現了對周邊環境狀態的精確捕捉,系統能夠迅速并準確地構建出周圍環境的點云模型,為后續的監測和分析提供了堅實的基礎。
3) 周界禁入區域設置
針對不同施工現場的特定需求,系統允許人工設置周界禁入區域。這一功能大大增加了系統的適用性和靈活性,使得監測更加精準,有效防止了未經授權的闖入和潛在的安全風險。
4) 專用工裝結構與防震防撞措施
在保證激光雷達高效運行的同時,專用工裝結構的設計充分考慮了設備的穩定性和安全性。通過防震、防撞等多重保護措施,確保激光雷達在各種惡劣環境下都能保持穩定的工作狀態。
5) 持續性能監測與維護
為確保系統長期穩定運行,通過定期校準激光雷達、軟硬件系統維護在內的持續性能監測機制。同時,定期分析環境變化對系統性能的影響,及時調整系統參數,確保在任何時候都能提供最優的監測效果。
通過上述綜合手段的應用,整套激光雷達周界監測系統的可靠性得到了保障和顯著加強。
3 系統驗證
通過在實際施工環境下安裝碎石樁機周界闖入預警系統并進行現場試驗,以驗證系統的可行性和有效性及濾波配準功能的可靠性,選取了100 組數據進行分析和驗證。在標準環境下將雷達設備放置在已知的特定環境中進行測試,通過研發系統軟件獲取100 組雷達UDP 數據,同時通過濾波算法對100 組連續數據進行濾波輸出,數據表見圖7,通過濾波能有效地剔除飛點及無效數據,實現數據穩定。
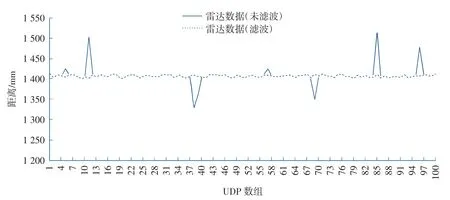
圖7 濾波數據前后對比折線圖Fig.7 Filtered data comparison chart
在實際的工程測試中,采用對碎石樁機危險作業區域及半徑進行了全方位的掃描,獲取了環境的深度信息和物體位置信息。本文選取了45°~135°范圍內的點云數據進行實時傳輸至上位機進行處理、分析與預警,這一區域的選擇是基于對碎石樁機周邊情況的關注,以確保系統能夠及時、準確地檢測到可能的危險情況,圖8 為碎石樁機附近區域固定的配準模型。
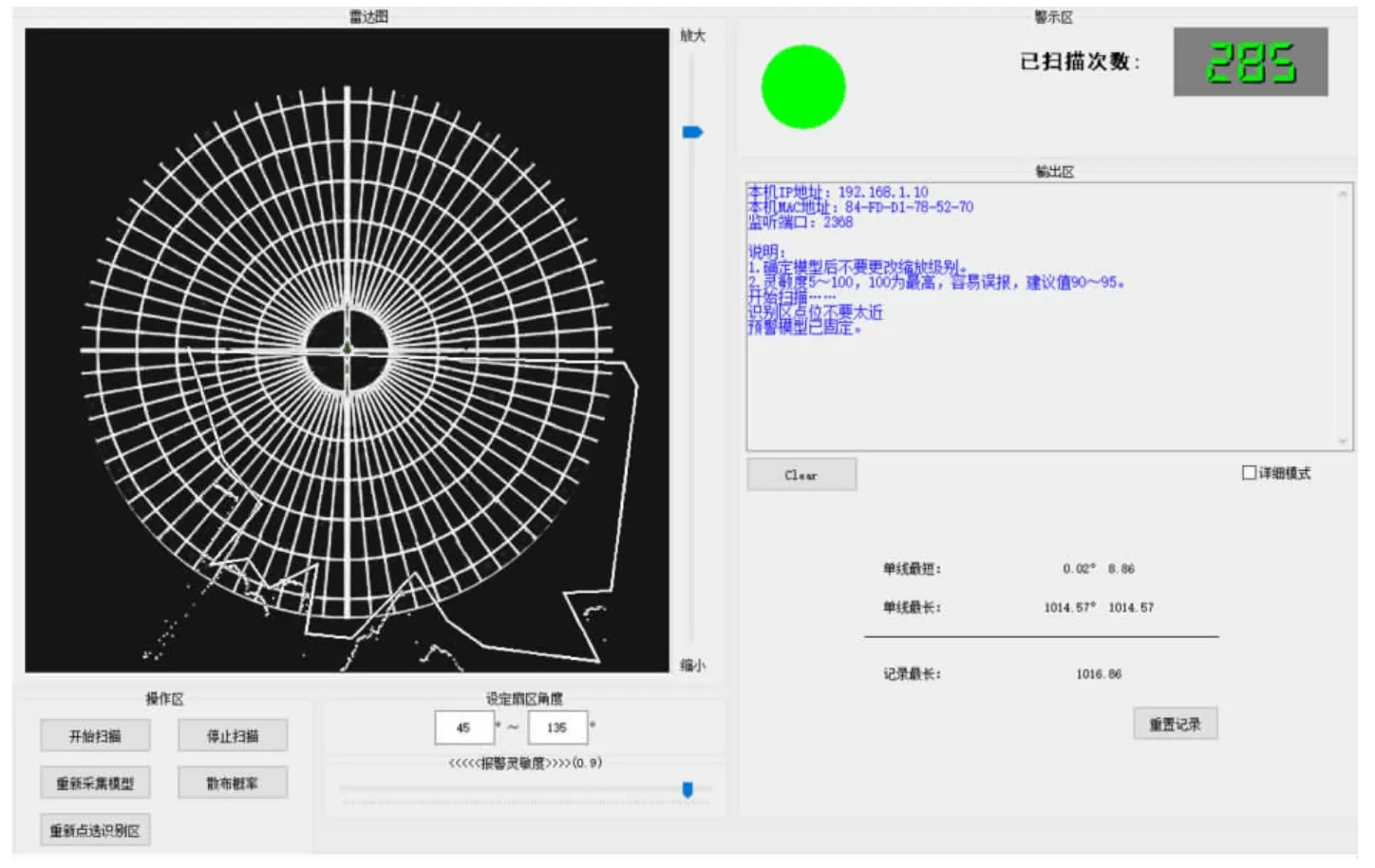
圖8 碎石樁機點云預警區域配準Fig.8 Gravel pile machine point cloud early warning area registration
當檢測到碎石樁機周界發生闖入時,系統能快速、準確輸出預警結果。
一級預警情況時,系統會發出聲光報警,提醒操作人員及時采取必要的措施;二級報警情況時,碎石樁機會停止運行,確保在發現潛在風險時,可以迅速采取安全措施,以保障設備和操作人員的安全。
圖9 為人員闖入時觸發預警。
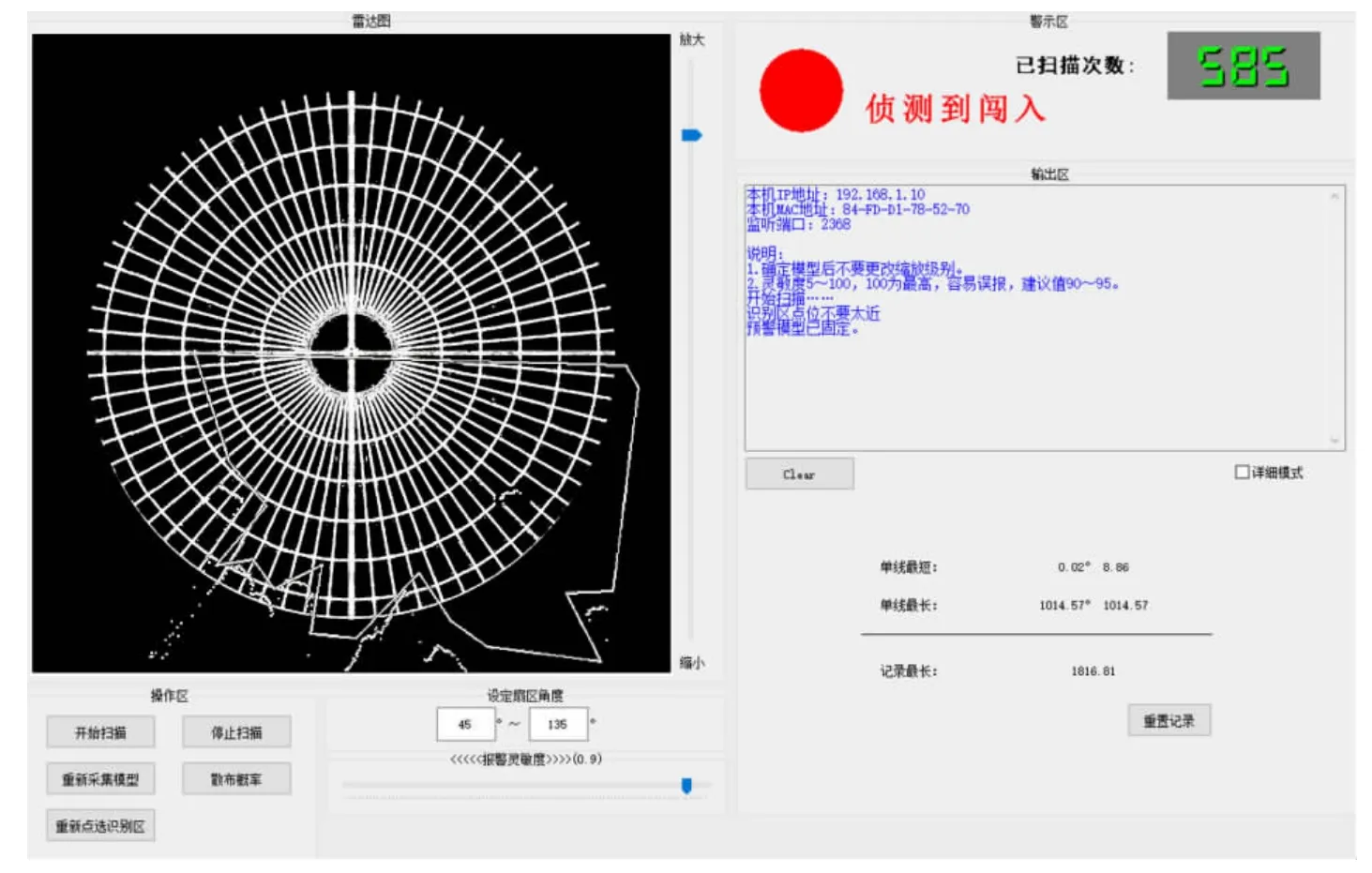
圖9 碎石樁機危險區域闖入預警Fig.9 Dangerous area intrusion warning of gravel pile machine
通過驗證整個系統運行穩定可靠,試驗結果達到預期,系統的性能滿足了設計要求,為碎石樁機在復雜環境中的安全運行提供了可靠的保障。
4 結語
本文通過周界闖入預警系統設計和研發,實現了對大型機械設備周邊環境進行全方位數據采集,對大型機械設備周界安全智能化監測預警進行了研究和探索,為工程機械設備施工安全監測提供了一套經濟、可靠的解決方案。系統采用的單線全向激光雷達具有較高的性價比和經濟性,可適用于施工現場環境,具備較強的實用性;系統通過對點云數據的處理、分析實現了周界安全智能化監測預警;系統不僅僅可應用于碎石樁機,還可以擴展到各類大型施工現場。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44