基于D3AR的半球共形陣低空風(fēng)切變風(fēng)速估計(jì)方法
2024-04-02 08:32:52李雙雙
雷達(dá)科學(xué)與技術(shù) 2024年1期
李 海,唐 芳,李雙雙
(中國(guó)民航大學(xué)天津市智能信號(hào)與圖像處理重點(diǎn)實(shí)驗(yàn)室,天津 300300)
0 引 言
在航空氣象領(lǐng)域,通常將飛機(jī)高度在600 m 以下,風(fēng)向風(fēng)速急劇變化的這一大氣現(xiàn)象稱為低空風(fēng)切變,其具有變化快、強(qiáng)度大、危害性高等典型特征[1]。如果在起飛或降落階段飛機(jī)遭遇風(fēng)切變,而此時(shí)飛行員缺乏充足的時(shí)間來(lái)調(diào)整飛機(jī)狀態(tài),可能會(huì)導(dǎo)致嚴(yán)重飛行事故發(fā)生[2]。因此,有關(guān)風(fēng)切變檢測(cè)的問(wèn)題一直以來(lái)都是民航領(lǐng)域關(guān)注熱點(diǎn)。作為對(duì)于低空風(fēng)切變檢測(cè)流程的關(guān)鍵,風(fēng)場(chǎng)速度估計(jì)的結(jié)果將直接影響整個(gè)風(fēng)切變檢測(cè)結(jié)果的準(zhǔn)確程度,因此,準(zhǔn)確估計(jì)風(fēng)速至關(guān)重要[3-5]。
機(jī)載氣象雷達(dá)是飛行中不可或缺的設(shè)備,可以對(duì)飛機(jī)航路上氣象狀況進(jìn)行實(shí)時(shí)監(jiān)測(cè),及時(shí)獲取氣象數(shù)據(jù)發(fā)現(xiàn)危險(xiǎn)天氣,以幫助飛行員提前規(guī)避風(fēng)切變等危險(xiǎn)大氣現(xiàn)象,從而保障飛行過(guò)程的安全[6]。隨著航空領(lǐng)域事業(yè)的發(fā)展和進(jìn)步,航空安全的實(shí)際使用需求對(duì)機(jī)載氣象雷達(dá)的探測(cè)范圍、掃描精度等性能提出了更高的要求。目前,與相對(duì)成熟的平面相控陣?yán)走_(dá)相比,安裝在飛機(jī)表面與飛行器貼合的共形陣機(jī)載氣象雷達(dá)具有許多優(yōu)點(diǎn),如共形陣天線孔徑的增大能提高目標(biāo)探測(cè)時(shí)方位向的分辨率,天線掃描范圍的擴(kuò)大有助于實(shí)現(xiàn)全方位掃描等[7]。共形陣機(jī)載雷達(dá)所具備的優(yōu)點(diǎn)可以更好地適應(yīng)航空氣象領(lǐng)域發(fā)展的需求。因此,對(duì)共形陣機(jī)載氣象雷達(dá)體制下目標(biāo)檢測(cè)的課題意義重大。
機(jī)載氣象雷達(dá)在檢測(cè)風(fēng)切變過(guò)程中風(fēng)速估計(jì)是關(guān)鍵步驟,但由于地雜波分布范圍較廣,強(qiáng)度大,導(dǎo)致雷達(dá)接收到的風(fēng)切變信號(hào)完全被地雜波信號(hào)所覆蓋,進(jìn)而導(dǎo)致風(fēng)速估計(jì)結(jié)果的準(zhǔn)確性受到影響。目前,針對(duì)低空風(fēng)切變風(fēng)速估計(jì)方法主要基于色加載知識(shí)輔助的空時(shí)自適應(yīng)處理(Space-Time Adaptive Processing, STAP)風(fēng)速估計(jì)方法[8]、基于直接數(shù)據(jù)域-擴(kuò)展因子化法(Direct Data Domain-Extended Factored Approach, DDD-EFA)的風(fēng)速估計(jì)方法[9]、基于同倫稀疏STAP 的風(fēng)速估計(jì)方法[10]和基于改進(jìn)輔助通道的風(fēng)速估計(jì)方法[11]等。以上方法在傳統(tǒng)線陣或面陣體制下都能準(zhǔn)確估計(jì)風(fēng)速,但對(duì)于陣元在空間上呈現(xiàn)兩維或三維分布的半球共形陣,還未有文獻(xiàn)對(duì)其風(fēng)切變檢測(cè)技術(shù)和風(fēng)速估計(jì)方法進(jìn)行研究報(bào)道。
基于此,本文提出了一種基于D3AR 風(fēng)速估計(jì)方法。該方法將空時(shí)自回歸算法(Space-Time Autoregression,STAR)思想引入到直接數(shù)據(jù)域(Direct Data Domain, DDD)算法中,首先將待檢測(cè)單元的數(shù)據(jù)分別從空域、時(shí)域以及空時(shí)域進(jìn)行信號(hào)對(duì)消處理,然后將處理后的數(shù)據(jù)矩陣描述為空時(shí)自回歸模型并估計(jì)模型參數(shù),再通過(guò)構(gòu)造與雜波子空間正交的空間來(lái)實(shí)現(xiàn)對(duì)雜波的抑制,最后通過(guò)提取待檢測(cè)單元的最大多普勒頻率來(lái)估計(jì)風(fēng)場(chǎng)速度。根據(jù)仿真結(jié)果顯示,該方法有效地實(shí)現(xiàn)了地雜波抑制,并且能夠精確估計(jì)風(fēng)速。
1 半球共形陣?yán)走_(dá)信號(hào)模型
1.1 地雜波信號(hào)
基于Ward 模型[12]仿真半球共形陣體制下的雜波回波信號(hào)。首先依據(jù)載機(jī)雷達(dá)參數(shù)確認(rèn)雷達(dá)所照射區(qū)域內(nèi)單個(gè)距離單元的寬度,然后將單個(gè)距離單元按照方位角劃分為多個(gè)雜波塊并計(jì)算每個(gè)雜波塊的回波信號(hào),通過(guò)將單個(gè)距離單元內(nèi)的所有雜波塊相加,得到雜波回波信號(hào)。
圖1為半球共形陣機(jī)載氣象雷達(dá)幾何模型,假設(shè)半球共形陣共有M個(gè)半徑分別為Rm的圓弧(頂點(diǎn)不放陣元),每一層圓弧上均勻分布著N個(gè)陣元,且相鄰兩個(gè)圓弧之間的間距為d,θ為方位角,φ為俯仰角,ψ為空間錐角,V為載機(jī)速度,由幾何關(guān)系可知波束矢量K(θ,φ)=[cosθcosφsinθcosφsinφ]T。
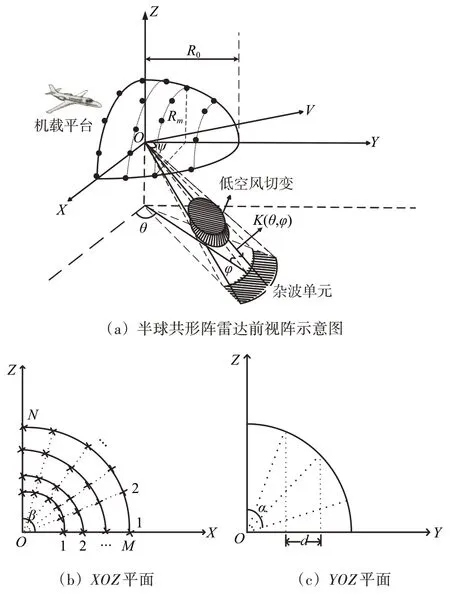
圖1 半球共形陣機(jī)載氣象雷達(dá)幾何模型
如圖1(b)所示,令右側(cè)第一段圓弧為半球形陣列的第一層,每一層的第一個(gè)陣元位于X軸正方向,則由半球共形陣機(jī)載雷達(dá)陣列幾何模型可以推導(dǎo)出第m(m= 1,2,…,M)行第n(n= 1,2,…,N)列的陣元位置坐標(biāo)Pm,n為
式中,Rm為第m層圓弧的半徑,,β為共形陣機(jī)載雷達(dá)圓弧所對(duì)應(yīng)的圓心角,α為圖1(c)YOZ平面所示的夾角。
根據(jù)陣元坐標(biāo)以及波束矢量推導(dǎo)得到半球共形陣?yán)走_(dá)地雜波回波信號(hào)的空間角頻率wsc:
式中,φl(shuí)為第l(l= 1,2,…,L)個(gè)距離單元雜波回波的俯仰角,L為回波總距離門數(shù)。
半球共形陣?yán)走_(dá)地雜波回波信號(hào)的時(shí)間角頻率wtc為
式中,fr為脈沖重復(fù)頻率,λ為波長(zhǎng)。
假設(shè)半球形陣列天線的第m行第n列個(gè)陣元在第k個(gè)脈沖下接收的第l個(gè)距離單元的雜波回波數(shù)據(jù)為Cl(m,n,k),則
式中,Rl為第l個(gè)距離單元的斜距,θ的取值范圍為[ 0,π ]。
1.2 低空風(fēng)切變信號(hào)
由于低空風(fēng)切變是體分布式目標(biāo),所包含的氣象粒子具有微粒性、疊加性和隨機(jī)性等特點(diǎn),因此采用撒點(diǎn)法[13]對(duì)風(fēng)切變場(chǎng)回波數(shù)據(jù)進(jìn)行仿真,通過(guò)將單個(gè)距離單元內(nèi)的所有散射點(diǎn)相加,得到該距離單元的風(fēng)場(chǎng)回波信號(hào)。則半球形陣列天線的第m行第n列陣元在第k個(gè)脈沖下接收的第l個(gè)距離單元的風(fēng)切變信號(hào)回波數(shù)據(jù)為Sl(m,n,k),且有
式中,Q表示一個(gè)距離單元內(nèi)散射點(diǎn)總數(shù),Rq為第q個(gè)散射點(diǎn)的斜距,Aq為由雷達(dá)方程推導(dǎo)得到的第q個(gè)散射點(diǎn)回波的幅度[14]:
式中,Z為風(fēng)場(chǎng)反射率因子,Pt為機(jī)載雷達(dá)的發(fā)射功率,G為天線的增益。
式(5)中,wss(θq,φq)表示第q個(gè)散射點(diǎn)的空間角頻率,wts(θq,φq)為時(shí)間角頻率,且有
式中,θq為第q個(gè)散射點(diǎn)的方位角,φq為俯仰角,vq為徑向速度。
1.3 回波信號(hào)
當(dāng)半球共形陣機(jī)載氣象雷達(dá)用于探測(cè)風(fēng)切變時(shí),其回波信號(hào)由地雜波C、風(fēng)切變S和噪聲組成,則半球形陣列天線接收的第l個(gè)距離單元的總回波數(shù)據(jù)Xl為
假設(shè)在雷達(dá)工作時(shí),在一個(gè)CPI 內(nèi)發(fā)射K個(gè)脈沖,用Xl表示第l個(gè)距離單元的半球共形陣機(jī)載氣象雷達(dá)所接收的回波數(shù)據(jù)矩陣:
2 基于D3AR 低空風(fēng)切變風(fēng)速估計(jì)方法
基于D3AR 低空風(fēng)切變風(fēng)速估計(jì)方法首先對(duì)待檢測(cè)單元的回波數(shù)據(jù)分別從空域、時(shí)域、空時(shí)域進(jìn)行信號(hào)對(duì)消處理,然后將處理后的樣本數(shù)據(jù)通過(guò)AR 模型構(gòu)造與雜波子空間正交的空間來(lái)實(shí)現(xiàn)對(duì)雜波的抑制,最后通過(guò)提取待檢測(cè)單元的最大多普勒頻率來(lái)估計(jì)風(fēng)場(chǎng)速度。下面詳細(xì)討論以下3個(gè)部分:信號(hào)對(duì)消處理、估計(jì)STAR 模型系數(shù)矩陣以及低空風(fēng)切變風(fēng)速估計(jì)。
2.1 信號(hào)對(duì)消處理
DDD 方法僅利用待檢測(cè)距離單元的數(shù)據(jù)信息進(jìn)行樣本數(shù)據(jù)的獲取,當(dāng)待檢測(cè)距離單元含有低空風(fēng)切變信號(hào)目標(biāo)時(shí),此時(shí)通過(guò)AR 模型來(lái)構(gòu)造的空時(shí)濾波器在抑制雜波的同時(shí)會(huì)造成風(fēng)切變信號(hào)損失。因此,為了防止風(fēng)切變信號(hào)被抑制導(dǎo)致無(wú)法準(zhǔn)確估計(jì)風(fēng)速,首先需要對(duì)待檢測(cè)距離單元數(shù)據(jù)分別從時(shí)域、空域以及空時(shí)域進(jìn)行信號(hào)對(duì)消處理,具體過(guò)程如下:
定義風(fēng)切變信號(hào)Sl(m,n,k) 為
根據(jù)載機(jī)速度、脈沖重復(fù)頻率等先驗(yàn)信息,假設(shè)風(fēng)切變信號(hào)方位已知,fl為歸一化多普勒頻率(fl的范圍為[]-1,1)。此時(shí),對(duì)于低空風(fēng)切變信號(hào),相鄰兩脈沖間的相位差為
相鄰兩陣元之間的相位差為
式中,ΔPm,n為相鄰兩陣元位置坐標(biāo)差。因此待檢測(cè)單元可通過(guò)利用兩陣元(脈沖)之間的相位差分別從空域、時(shí)域以及空時(shí)域進(jìn)行信號(hào)對(duì)消處理。
對(duì)第l個(gè)待檢測(cè)單元的和回波數(shù)據(jù)從空域利用兩陣元相消濾除風(fēng)切變信號(hào)時(shí),可以得到如下數(shù)據(jù)矩陣:
式中,Yls為第l個(gè)待檢測(cè)距離單元從空域利用兩陣元相消濾除風(fēng)切變信號(hào)后的數(shù)據(jù)矩陣,其維度為(MN- 1) ×K,“*”表示共軛運(yùn)算。
對(duì)第l個(gè)待檢測(cè)距離單元的回波數(shù)據(jù)從時(shí)域進(jìn)行對(duì)消處理時(shí),當(dāng)待更新的fl在[]-1,1 中取某一值時(shí),利用兩脈沖對(duì)消后得到如下數(shù)據(jù)矩陣:
式中,Ylt為第l個(gè)待檢測(cè)距離單元從時(shí)域利用兩脈沖相消進(jìn)行信號(hào)濾除處理后的數(shù)據(jù)矩陣,其維度為MN×(K- 1) 。
同理,利用兩脈沖、兩陣元相消對(duì)第l個(gè)待檢測(cè)距離單元回波數(shù)據(jù)從空時(shí)域進(jìn)行信號(hào)對(duì)消處理后的數(shù)據(jù)矩陣為
式中,Ylst為第l個(gè)待檢測(cè)距離單元從空時(shí)域利用兩陣元兩脈沖相消進(jìn)行信號(hào)濾除處理后的數(shù)據(jù)矩陣,其維度為(MN- 1) ×(K- 1) 。
更新fl的取值并執(zhí)行式(13)~(15),當(dāng)待檢測(cè)距離單元利用信號(hào)對(duì)消后的樣本數(shù)據(jù)矩陣經(jīng)過(guò)AR 模型所構(gòu)造的空時(shí)自適應(yīng)處理器的輸出功率最大時(shí),此時(shí)Yls、Ylt和Ylst3 個(gè)數(shù)據(jù)矩陣中的風(fēng)切變信號(hào)被有效消除。
2.2 估計(jì)STAR模型系數(shù)矩陣
假設(shè)當(dāng)待更新的fl在[-1,1 ]范圍中所取某值是該待檢測(cè)距離單元風(fēng)場(chǎng)目標(biāo)的歸一化多普勒頻率,此時(shí)由該單元通過(guò)信號(hào)對(duì)消處理后得到的3個(gè)樣本數(shù)據(jù)矩陣Yls、Ylt以及Ylst中就只包含雜波和噪聲,為了方便計(jì)算,選取Yls中的(K- 1) 列數(shù)據(jù)、以及Ylt中的(MN- 1) 行數(shù)據(jù),再將3 個(gè)樣本數(shù)據(jù)矩陣排列成(MN- 1 )(K- 1) × 1 維矢量并分別記為Y1、Y2和Y3。由于任意隨機(jī)過(guò)程都可描述為AR 模型,則Y1、Y2和Y3滿足如下自回歸模型[15]:
式中,t= 1,2,3,k= 1,2,…,K-P,Ai為D×(MN- 1)維的空時(shí)自回歸系數(shù)矩陣,D代表AR 模型的空域階數(shù),P為時(shí)域階數(shù)。AR 模型的時(shí)域階數(shù)和空域階數(shù)未知,需要通過(guò)樣本數(shù)據(jù)對(duì)其進(jìn)行估計(jì),由于已有許多文獻(xiàn)介紹了AR 模型階數(shù)估計(jì)方法[15-16],本文不再敘述。模型階數(shù)D、P確定后,再通過(guò)訓(xùn)練樣本估計(jì)自回歸系數(shù)矩陣。
記A=[A0A1…AD-1],A的維數(shù)為D×(MN-1)P,將處理后的訓(xùn)練樣本單元的數(shù)據(jù)重新改寫為
式中,et為(MN- 1)P×(K-P)維矩陣,則處理后的所有樣本數(shù)據(jù)矩陣為
式中,E為(MN- 1)P× 3(K-P)維矩陣,因此,根據(jù)式(17),訓(xùn)練樣本數(shù)據(jù)矩陣E滿足如下方程:
可以看出,式(20)中A的解是由矩陣E的零空間確定,但由于E滿秩不存在零空間,所以根據(jù)最小均方誤差準(zhǔn)則,對(duì)于自回歸系數(shù)矩陣A的求解可以轉(zhuǎn)換為最小二乘準(zhǔn)則來(lái)估計(jì)[16]:
為了確保不產(chǎn)生平凡解,A必須滿足AAH=I,且樣本矩陣E的D個(gè)小奇異值對(duì)應(yīng)的左奇異矢量構(gòu)成矩陣A的列。
2.3 低空風(fēng)切變風(fēng)速估計(jì)
完成自回歸系數(shù)矩陣A的估計(jì)后,利用A0,A1,…,AD-1構(gòu)造如下濾波器系數(shù)矩陣:
式中,B為D(K-P)×(MN- 1 )(K- 1) 維矩陣,且滿足如下方程:
矩陣B與雜波和噪聲所張成的子空間正交,根據(jù)匹配濾波理論,得到D3AR 算法的空時(shí)自適應(yīng)權(quán)矢量為[17]
式中,ws為歸一化空間角頻率,fl上文中假設(shè)的歸一化多普勒頻率。由此可以得到信號(hào)匹配結(jié)果為
通過(guò)更新fl的取值,可以得到對(duì)應(yīng)的空時(shí)自適應(yīng)處理器權(quán)矢量,進(jìn)行信號(hào)匹配后求解輸出功率。當(dāng)其最大時(shí),此時(shí)fl的取值即為對(duì)應(yīng)距離單元的多普勒頻率估計(jì)值。這是因?yàn)楫?dāng)處理器的輸出功率最大化時(shí),該待檢測(cè)距離單元經(jīng)過(guò)信號(hào)對(duì)消處理后的樣本數(shù)據(jù)矩陣中風(fēng)切變信號(hào)被有效濾除,再通過(guò)AR 模型所構(gòu)造的空時(shí)濾波器就可以使雜波信號(hào)得到有效抑制,同時(shí)風(fēng)切變信號(hào)得到積累;如果處理器的輸出功率不是最大,說(shuō)明該待檢測(cè)距離單元在信號(hào)對(duì)消處理過(guò)程中風(fēng)切變信號(hào)沒(méi)有被有效濾除,導(dǎo)致得到的樣本數(shù)據(jù)經(jīng)過(guò)AR 模型所構(gòu)造的空時(shí)濾波器在抑制雜波的同時(shí)會(huì)造成風(fēng)切變信號(hào)損失。即可以通過(guò)式(28)來(lái)估計(jì)得到該待檢測(cè)距離單元:
最后,依照上述方法分別估計(jì)每一個(gè)距離單元的風(fēng)速值,完成整個(gè)風(fēng)場(chǎng)的風(fēng)速估計(jì)。
2.4 方法流程及步驟
圖2展示了基于D3AR的半球共形陣風(fēng)切變風(fēng)速估計(jì)方法的整體流程。

圖2 基于D3AR風(fēng)速估計(jì)方法基本流程
步驟1:分別從空域、時(shí)域以及空時(shí)域利用兩脈沖(陣元)進(jìn)行信號(hào)對(duì)消處理;
步驟2:將處理后的訓(xùn)練樣本單元描述為空時(shí)自回歸模型;
步驟3:根據(jù)樣本單元估計(jì)空時(shí)自回歸模型階數(shù),并構(gòu)造濾波器模型系數(shù)矩陣;
步驟4:根據(jù)匹配濾波理論,構(gòu)造與雜波子空間正交的空間來(lái)實(shí)現(xiàn)對(duì)雜波的抑制,最后通過(guò)搜索該待檢測(cè)距離單元的輸出功率最大時(shí)所對(duì)應(yīng)的多普勒頻率,完成風(fēng)速估計(jì);
步驟5:更新待檢測(cè)單元,重復(fù)上述步驟估計(jì)所有待檢測(cè)距離單元的風(fēng)速值,完成整個(gè)風(fēng)場(chǎng)速度估計(jì)。
3 仿真結(jié)果及分析
3.1 仿真參數(shù)設(shè)計(jì)
假設(shè)風(fēng)場(chǎng)目標(biāo)處于8.5~16.5 km 處,表1 所示為仿真參數(shù)值。
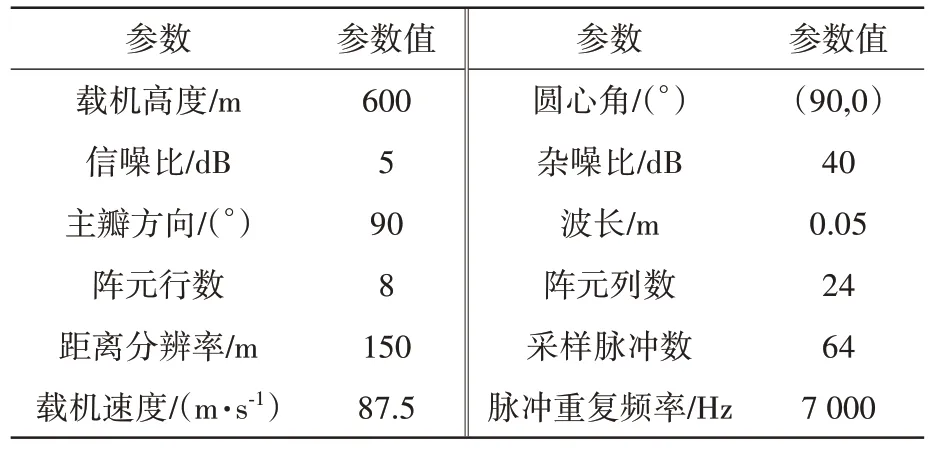
表1 載機(jī)及雷達(dá)仿真參數(shù)
3.2 仿真結(jié)果分析
圖3 為半球共形陣機(jī)載氣象雷達(dá)回波信號(hào)第87 號(hào)距離門空時(shí)譜仿真結(jié)果,由圖可以看出,地雜波信號(hào)的空時(shí)二維譜在空間的分布表現(xiàn)為橢圓形狀,風(fēng)切變信號(hào)在空間表現(xiàn)為一條窄帶,且地雜波信號(hào)的功率明顯大于風(fēng)切變信號(hào),使得風(fēng)切變信號(hào)完全被淹沒(méi),從而導(dǎo)致難以被檢測(cè)。

圖3 第87號(hào)距離單元空時(shí)譜
圖4 為D3AR 方法、最優(yōu)STAP 方法、DW-STAP方法以及STAR 方法的第87 號(hào)距離單元的改善因子對(duì)比圖。從圖可以看出,上述方法均在主雜波區(qū)域即零頻區(qū)形成凹口,造成性能損失,與其余方法相比,本文方法在主雜波區(qū)域形成的凹口更窄、更淺,雜波抑制性能明顯提高。
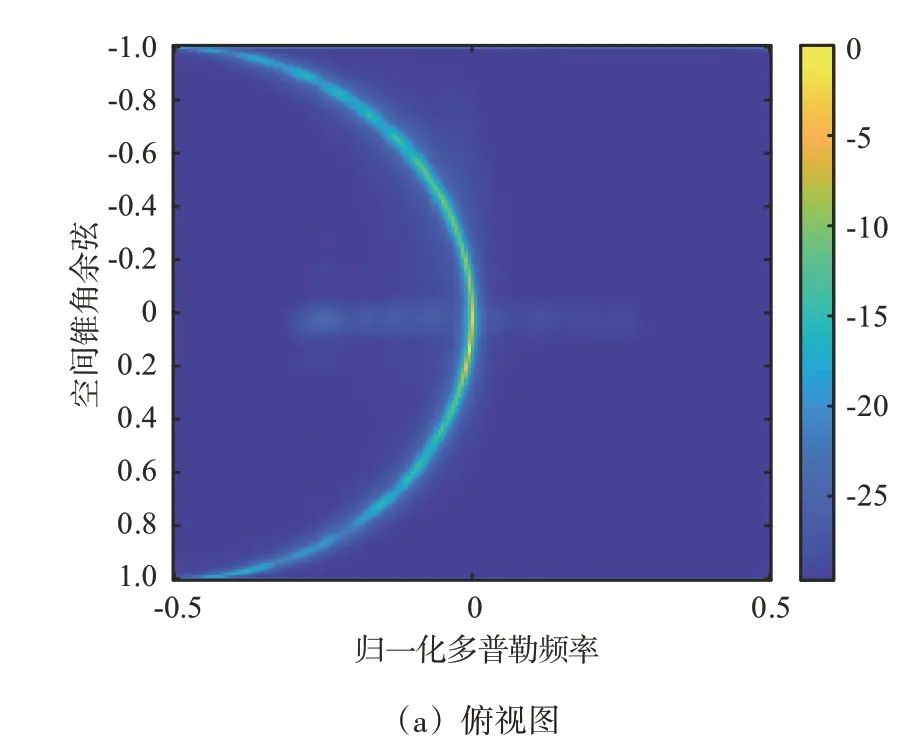
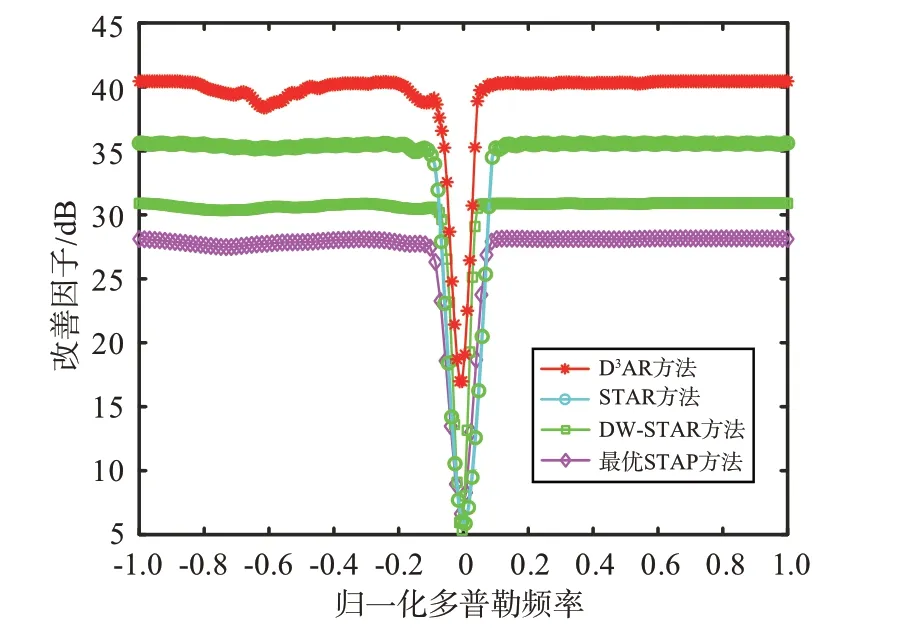
圖4 改善因子對(duì)比圖
圖5 為D3AR 方法與最優(yōu)STAP 方法、DWSTAP 方法、以及STAR 方法風(fēng)速估計(jì)結(jié)果對(duì)比圖。從圖中可以看出,本文所提方法在不利用參考單元樣本數(shù)據(jù)的情況下仍然能較準(zhǔn)確地估計(jì)風(fēng)速。對(duì)比圖顯示,最優(yōu)STAP 法的風(fēng)速估計(jì)結(jié)果不理想,主要是由于半球共形陣特殊陣列流型導(dǎo)致雜波非平穩(wěn)性更強(qiáng),使得所需的獨(dú)立同分布樣本數(shù)不滿足RMB 準(zhǔn)則,最優(yōu)STAP 方法性能受損[5];經(jīng)DW補(bǔ)償后,仍然不能得到理想效果,這是由于DW方法僅對(duì)時(shí)域進(jìn)行了多普勒頻率補(bǔ)償,沒(méi)有對(duì)空間頻率進(jìn)行補(bǔ)償,所以經(jīng)過(guò)DW 補(bǔ)償后,仍不能準(zhǔn)確估計(jì)風(fēng)速[18];STAR 方法需要用到與待檢測(cè)單元相鄰單元的數(shù)據(jù)來(lái)構(gòu)造AR 模型建立空時(shí)二維濾波器進(jìn)行雜波抑制以及估計(jì)風(fēng)速[17],其結(jié)果的準(zhǔn)確性依賴于IID 樣本數(shù)量。而D3AR 方法僅利用待檢測(cè)單元的數(shù)據(jù)且不需要進(jìn)行距離依賴性矯正就能準(zhǔn)確估計(jì)風(fēng)速。
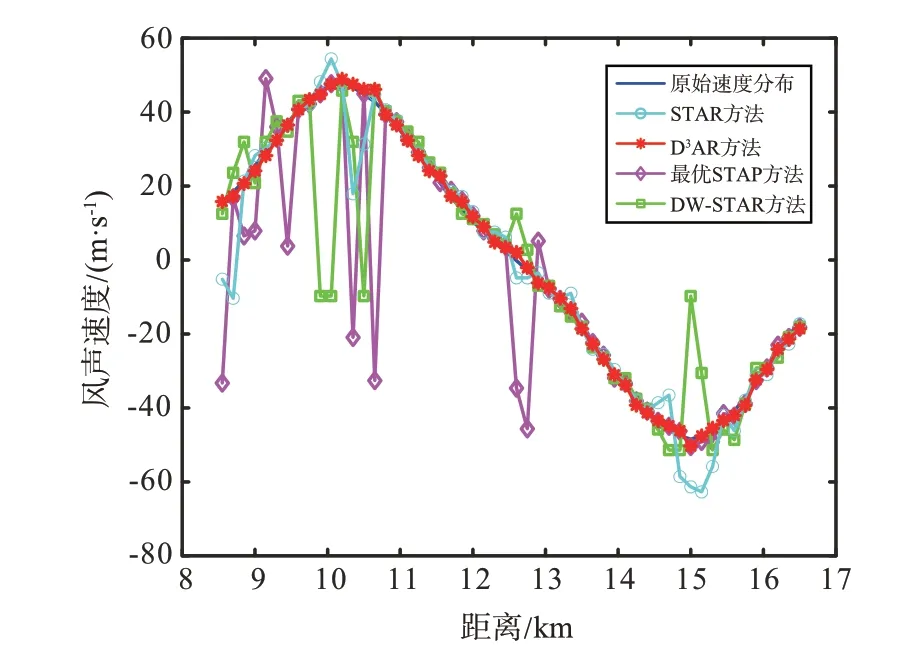
圖5 風(fēng)速估計(jì)結(jié)果
本文所提方法主要包括求濾波器權(quán)矢量和空時(shí)濾波兩部分的運(yùn)算量,表2 為D3AR 方法、最優(yōu)STAP 方法、DW-STAP 方法以及STAR 方法運(yùn)算量對(duì)比,其中L1為最優(yōu)STAP 方法和DW-STAP 方法中所需的訓(xùn)練樣本數(shù)。從表中可以看出本文所提方法的運(yùn)算量比最優(yōu)STAP方法、DW-STAP法以及STAR法都要小。
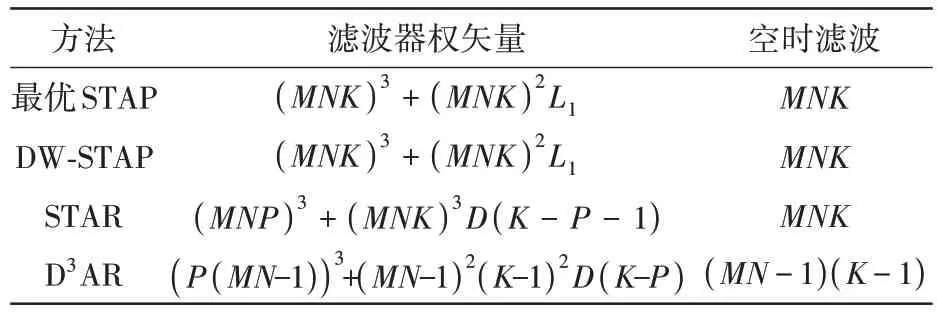
表2 不同風(fēng)速估計(jì)方法運(yùn)算量對(duì)比
表3 給出了D3AR 方法、最優(yōu)STAP 方法、DWSTAP 方法以及STAR 方法的均方根誤差對(duì)比,可以看出,本文所提D3AR方法的均方根誤差最小。
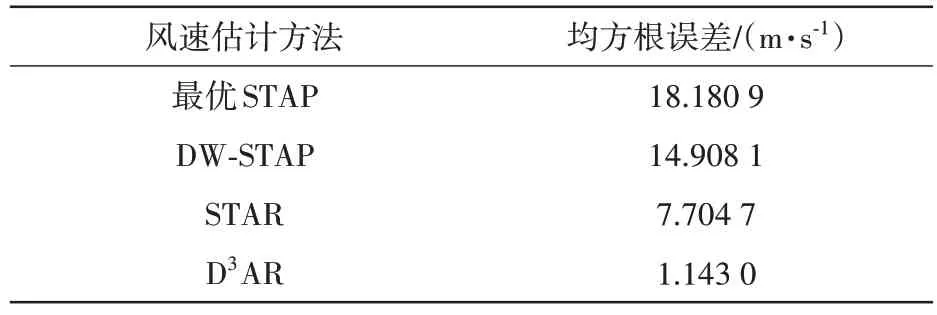
表3 不同風(fēng)速估計(jì)方法均方根誤差
4 結(jié)束語(yǔ)
針對(duì)半球共形陣體制下進(jìn)行低空風(fēng)切變檢測(cè)時(shí)會(huì)受到強(qiáng)低雜波信號(hào)的干擾,導(dǎo)致風(fēng)切變信號(hào)難以檢測(cè)的問(wèn)題,提出了一種基于D3AR 的半球共形陣風(fēng)切變風(fēng)速估計(jì)方法。該方法將空時(shí)自回歸算法思想引入到直接數(shù)據(jù)算法思想中,僅用待檢測(cè)單元濾除風(fēng)切變信號(hào)后的樣本數(shù)據(jù)來(lái)構(gòu)建空時(shí)自回歸模型,再通過(guò)構(gòu)造與雜波子空間正交的空間來(lái)實(shí)現(xiàn)對(duì)雜波的抑制,最后通過(guò)提取待檢測(cè)單元的最大多普勒頻率來(lái)估計(jì)風(fēng)場(chǎng)速度。仿真結(jié)果表明,該方法可以在半球共形陣體制下僅用待檢測(cè)距離單元的數(shù)據(jù)準(zhǔn)確估計(jì)風(fēng)速,且該方法僅在時(shí)域進(jìn)行滑窗處理,避免了空域滑窗對(duì)陣列結(jié)構(gòu)的嚴(yán)格要求,因此適用于任意陣列,但由于該方法中AR 模型參數(shù)的選擇會(huì)影響風(fēng)速估計(jì)結(jié)果的準(zhǔn)確性,因此需進(jìn)一步研究更為準(zhǔn)確的AR 模型參數(shù)估計(jì)算法。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
電機(jī)與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(bào)(2020年5期)2021-01-14 09:26:54
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
西南交通大學(xué)學(xué)報(bào)(2016年4期)2016-06-15 20:29:37
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
