一種基于修正電壓的新型暫態量保護原理
2024-04-02 09:42:44薛士敏李翔宇陳文杰張君婷張皓明陰文湘
電力建設 2024年4期
關鍵詞:故障
薛士敏,李翔宇,陳文杰,張君婷,張皓明,陰文湘
(天津大學電氣自動化與信息工程學院,天津市 300072)
0 引 言
基于模塊化多電平換流器(modular multilevel converter,MMC)的柔性直流輸電技術在電能質量、功率控制、供電可靠性等方面具有明顯優勢,成為構建新型電力系統的重要技術之一,同時也為高電壓等級、大容量的柔性直流輸電系統的發展奠定了基礎,具有廣泛的應用前景[1-8]。然而,如果直流線路發生故障,由于柔性直流輸電系統的弱阻尼、低慣性的特性,故障電流上升速度快,幅值大,所以通常要求保護在極短時間內識別故障,以免引起不必要的停運及擴大停電范圍[9-10]。因此,研究能夠快速識別故障的線路保護對于柔性直流系統來說十分必要。
柔性直流系統線路保護可分為單端量保護和雙端量保護。單端量保護依據選取的故障信息類型,可分為頻域單端量保護和時域單端量保護。頻域單端量保護通過提取電氣量的頻域特征進行故障識別,一般存在原理復雜、計算量大、保護整定值難以選擇等問題[11-14]。時域單端量保護具有方法簡單、動作速度快的優點,可滿足柔性直流系統對保護速動性的嚴苛要求[15],具有較好的應用前景。
時域單端量保護主要通過檢測電壓、電流突變量等數值特征或故障行波的波形特征來構成故障識別判據[16-23],現有直流工程以行波保護和微分欠壓保護作為主保護,存在耐過渡電阻能力較差的問題,無法滿足柔性直流系統對保護靈敏性的要求[24-25]。針對直流線路行波保護靈敏性較差的問題,文獻[20-23]分別提取表征故障首行波波頭陡度的波形特征,由于過渡電阻對波形的變化影響較小,所以具有較好的耐受過渡電阻能力,但雷擊干擾下,可能發生誤動。文獻[26]利用故障電壓幅值判據與極值時間判據相配合構造行波保護方法,但整定值裕度較低,部分故障情況下可能誤動。文獻[27]構造了不同采樣周期下的時域暫態電壓比判據,文獻[28]基于電壓反射行波二階差分構造保護方案,兩者都削弱了高阻對保護的影響,但時間窗均超過了3 ms[29]。文獻[30]綜合低壓判據、電壓變化率判據和方向性過流判據識別故障,但仍然存在耐過渡電阻能力差的問題。文獻[31]提出一種基于電流量的幅值及變化率的保護原理,可靠性好,但耐受過渡電阻的能力較差,且不能實現故障的選極。總之,單端量保護的綜合性能還尚未完全達到柔性直流系統的要求。
相較于單端量保護,雙端量保護具有可靠性高、耐過渡電阻能力較強等優點[32-38],但受限于通信傳輸速率與通信距離,只能在有限的傳輸距離內滿足速動性要求,所以通常作為后備保護使用。其中,方向縱聯保護僅需傳遞具有方向標識的邏輯量,通信壓力較小且通信方式相對靈活[24]。
針對傳統單端量保護在柔性直流系統中的不足,本文提出一種基于修正電壓的新型暫態量保護原理。首先分析故障后柔性直流系統的暫態過程,通過解析區內、外故障下直流線路的暫態特征,提出一種電壓修正算法,基于修正電壓的積聚量有效區分了區內與正向區外故障,并利用新的方向元件構成縱聯方向后備保護,解決了單端量保護在高阻故障下靈敏度較低的問題。最后基于PSCAD/EMTDC仿真平臺搭建四端柔性直流系統模型并仿真驗證所提保護方案的性能。
1 柔性直流輸電系統典型拓撲結構
圖1為四端柔性直流系統示意圖,其中,MMC子模塊采用半橋子模塊,直流線路的接線方式為對稱雙極結構。圖中:L12—L43表示各線路的限流電抗器,P12—P43表示各線路兩端的繼電保護裝置,Pm為母線側的保護裝置,f1—f10表示不同的故障位置,其中,f1、f2、f3分別位于直流輸電線路首端、中點、末端,f8、f9、f10分別位于輸電線路距離P143 km、30 km、150 km處,f4、f5分別位于MMC4側、MMC1側母線處,f6、f7分別位于Line34、Line12中點。
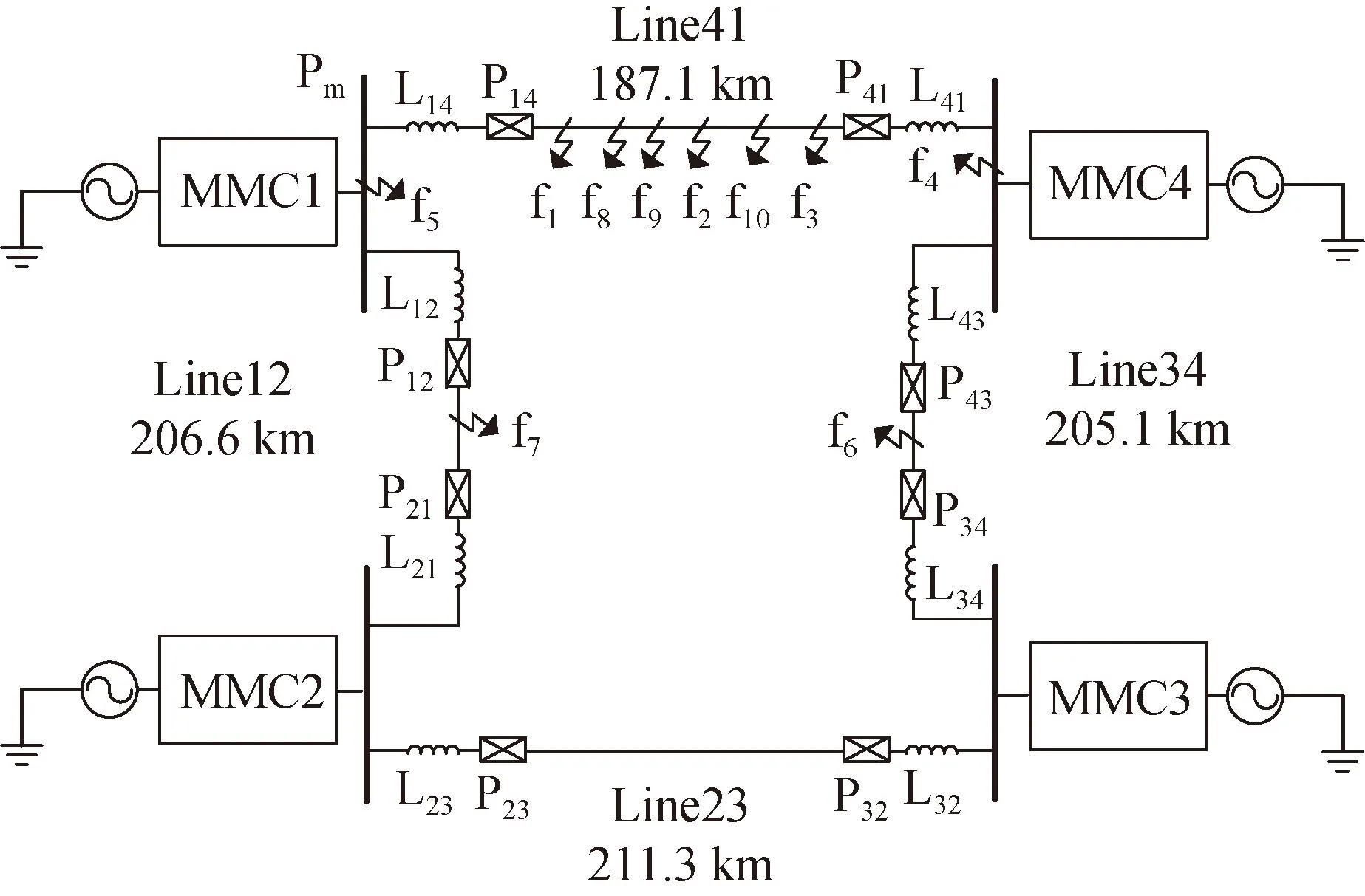
圖1 四端柔性直流輸電系統
2 故障行波特征分析
由于柔性直流線路中極分量存在耦合,故常采用解耦后的模量進行暫態分析,且與0模波相比,1模行波色散程度小,穩定程度更高,因此本文采用1模行波作為分析對象。常用的解耦公式為:
(1)
式中:Fp、Fn分別是正負極電氣量;F1、F0分別表示1模分量、0模分量。
2.1 區內故障分析
線路Line41區內發生正極接地故障時,根據疊加定理,故障后的網絡可視為正常網絡與故障分量網絡的疊加。因為系統的故障特性主要由行波故障分量決定,而故障行波只存在于故障分量網絡中,所以僅對故障分量網絡進行分析,如圖2所示,圖中Cm、Lm為MMC等效電容和電感,在未經特殊說明的情況下該圖及后續提到的所有電壓和電流均默認為故障分量。ΔUdc為故障前線路對地電壓,于是故障點1模初始行波表達式如式(2)所示[39]。
(2)
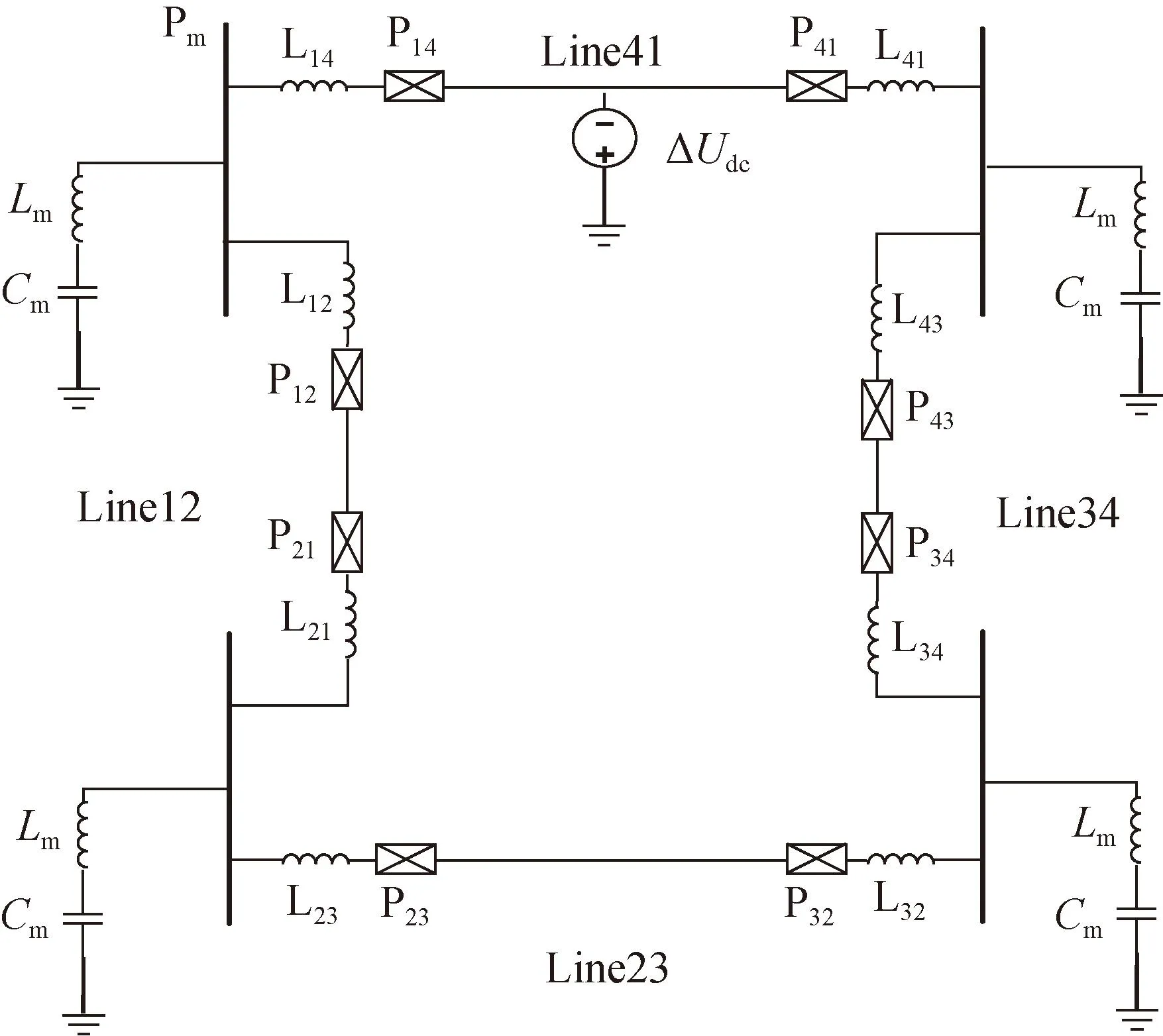
圖2 區內故障故障分量網絡等值電路
式中:ZC1、ZC0表示故障線路特征阻抗的1、0模分量;Rg為故障點的過渡電阻。
初始行波抵達MMC時將發生折反射,以P14為例,在背側線路反射波回到MMC1前,初始行波在P14處的1模彼得遜法等效電路,如圖3所示。圖中所有阻抗和暫態量均為其1模分量,其中,Δu′f為初始行波抵達MMC1邊界的入射波,其滿足Δu′f=AlΔUf,Al、ΔUf、i14、i12、im、Z41、Z12和L41、L12分別表示線路的衰減系數、故障點處的暫態激勵、P14處測量的故障電流、折射到線路Line12和MMC1上的電流、線路Line41和Line12的特征阻抗和限流電感。
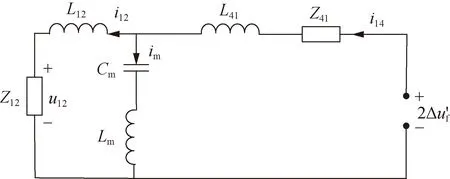
圖3 區內故障時初始行波的1模彼得遜等值電路
根據圖3列寫復頻域方程組為:
(3)
式中:ΔU′f、I14、I12、Im分別為圖3中Δu′f、i14、i12、im的復頻域表達形式;Z∑m=sLm+1/(sCm)。
得到復頻域的通解為:
(4)
進一步求得各電壓的1模分量為:
(5)
解得P14處電壓和電流的1模分量為:
(6)
式中:Z∑1=sL12+Z12;Z∑4=sL41+Z41。
2.2 正向區外故障分析
當圖1中MMC4母線f4處發生經過渡電阻Rg的正極接地故障時,初始行波在P14的1模彼得遜等效電路圖如圖4所示。
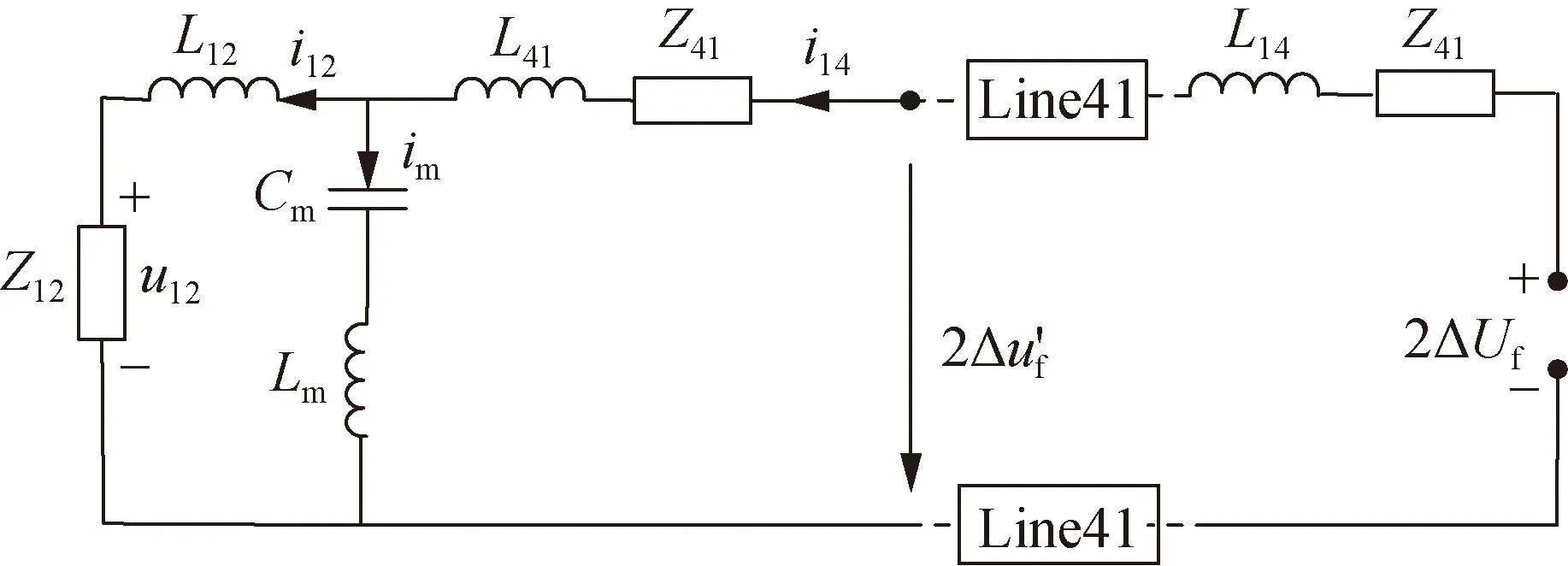
圖4 區外故障時初始行波的1模彼得遜等值電路
Δu′f的復頻域形式如式(7)所示[40]:
(7)
式中:A41(s)為線路對初始行波的衰減系數。
線路Line41發生正向區外和區內短路故障時,P14處的1模彼得遜等值電路基本相同,只有入射波ΔU′f不同,故將式(7)中的入射波ΔU′f代入到式(6)中,即可得到正向區外故障下的電壓u14和電流i14的復頻域表達式。在上述各表達式中代入相關參數,再利用拉普拉斯反變換,即可得到時域表達式。
圖5為區內末端f3處和MMC4母線f4處分別發生正極接地短路故障時,P14處故障電壓、電流1模分量的理論計算波形、仿真波形。可見故障初期,仿真波形與理論計算波形變化趨勢基本保持一致。由圖5可知,由于區外故障時線路兩側邊界電感對電壓行波產生明顯的阻礙作用,極大限制了電壓的峰值,同時也減少了電壓的變化率,所以區內故障下的電壓幅值和變化率明顯大于區外故障下的;而在故障初期的1.2 ms內,區內、外故障下的電流幅值和變化率相差不大[10]。總之,在故障發生后的短時間內,邊界電感對故障電壓影響程度相比于對故障電流的影響程度更大,因此利用電壓信號可以更加靈敏地反映故障特征。對圖5中的電壓、電流1模分量的變化量進行積分,在1.2 ms內,區內故障的電壓變化量積分值比區外故障下的多87.03%;區內故障的電流變化量積分值比區外故障下的多42.73%。該結果與上述理論分析基本一致,進一步證實了在邊界電抗器裝在線路兩側的柔性直流系統中,更適合利用電壓判別區內、外故障。
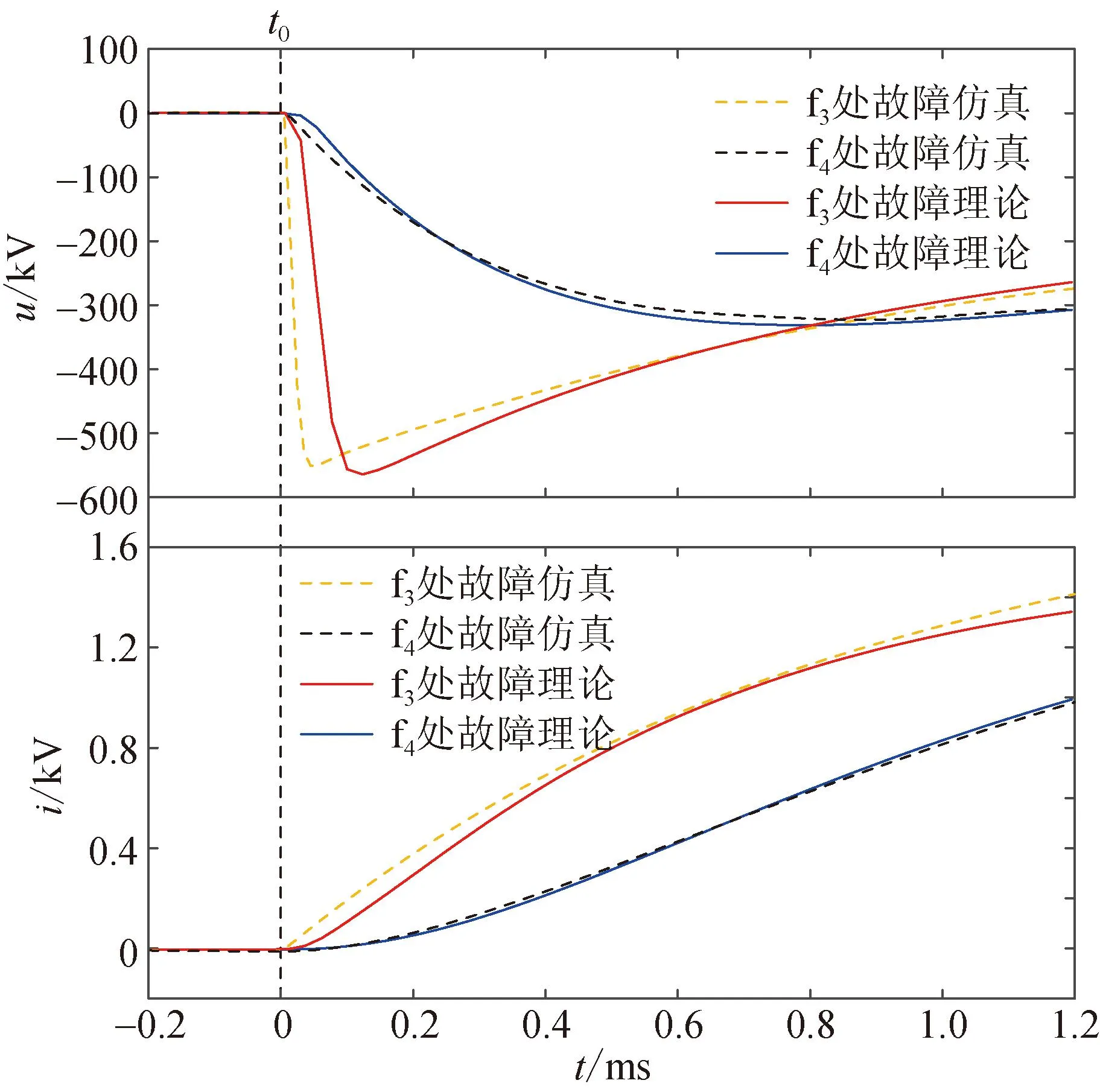
圖5 區內、外故障下電壓、電流的波形圖
3 故障識別方法及判據
3.1 電壓修正算法
圖6為區內末端f3處和MMC4母線f4處分別發生正極接地短路故障時,P14處故障電壓1模分量的仿真波形。其中,a為初始行波抵達P14處電壓開始變化的起點,b、b′和c、c′點分別為區內和區外故障下的電壓的第一個極值點和二次行波返回導致電壓再次突變的起點。分析可得,區內故障時,電壓在a—b段急劇下降,并在t1時刻降到極值點;區外故障時,由于邊界電抗器的阻礙作用,電壓在a—b′段的下降較慢,在t2時刻達到極值點。初始行波運動到MMC1后對限流電抗器和換流器充電,所以從極值點到t3這段時間內電壓呈對數規律回升[9],且區內故障的電壓變化率大于區外故障。所以在故障初期的t1—t3內,較難從電壓幅值的角度區分區內、外故障,而t3后反射波的到來使得區內、外故障下的故障電壓變化趨勢發生改變,更難從電壓幅值的角度進行區分,其實質是由于電壓增減變化的雙重性和時間上的不確定性造成的。因此,如果假設電壓只朝一個方向變化,就可以增大區內、外故障下的電壓差異,從而使故障識別和定位變得更容易。
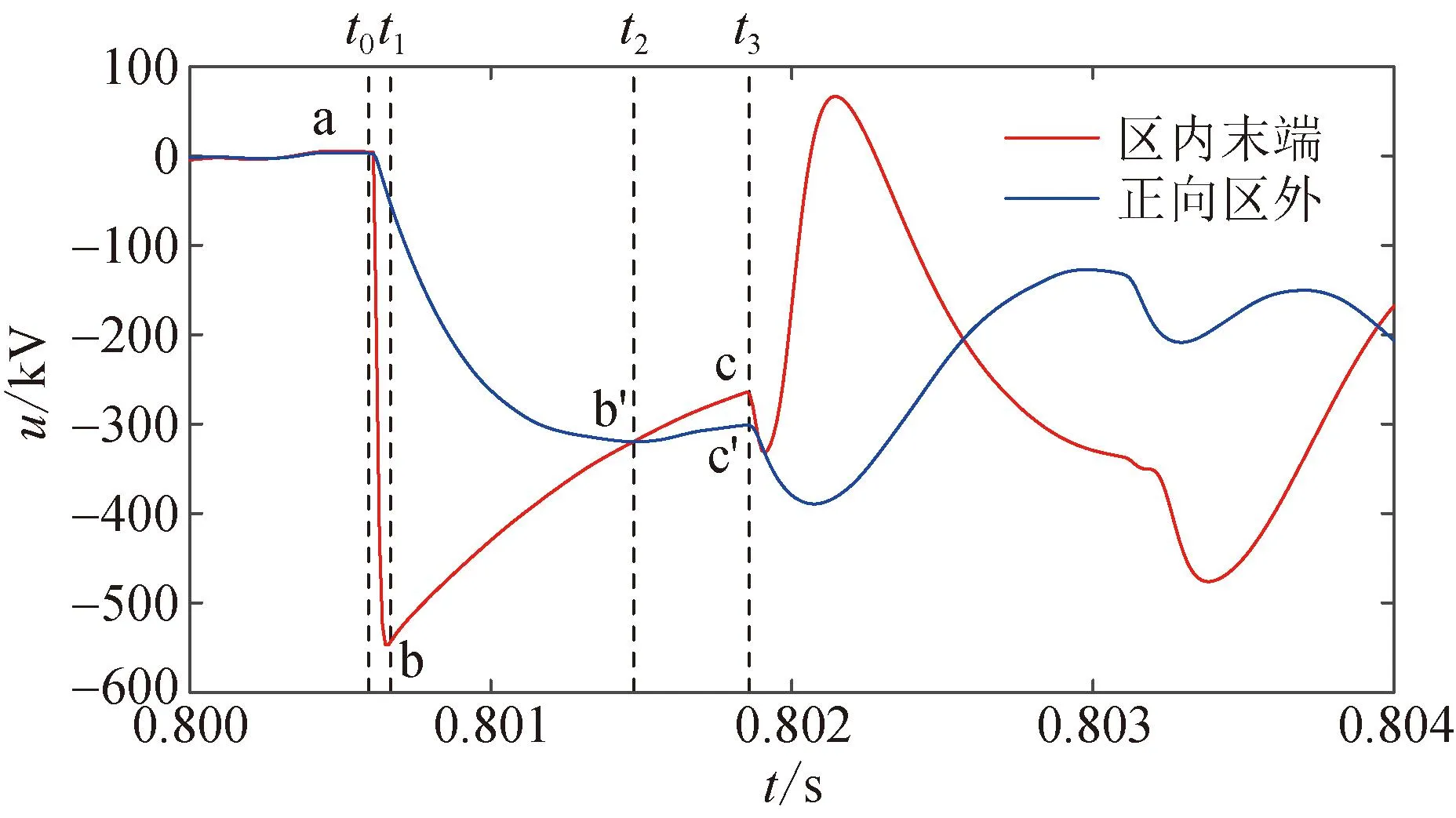
圖6 區內、外故障時電壓故障分量的仿真波形圖
為實現上述假設(本方案假設電壓只朝負方向變化),對采集到的電壓數據進行修正,當電壓變化率為負時,電壓遵從原變化趨勢,不進行修正;當電壓變化率為正時,先將電壓變化量取反,然后加在前一時刻電壓值上,從而得到當前時刻的修正電壓值。具體的處理算法如式(8)所示。
(8)
式中:Δu(i)=u(i+1)-u(i);u(i)為采集的原始電壓數據;uxz(i)為修正電壓。
圖7為區內末端f3處和MMC4出口f4處發生故障時P14處的修正電壓波形圖。圖8為Line41上的不同位置發生正極接地故障的修正電壓波形圖。區內其他位置與MMC4母線f4處的故障的修正電壓具有更大的差距。修正電壓綜合利用了故障后的電壓幅值和電壓變化率特征,使得區內、外故障間的差異更明顯,因此,利用修正電壓的幅值可以更靈敏準確地區分故障。
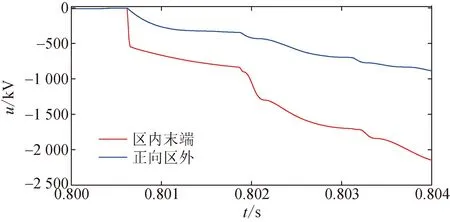
圖7 區內、外故障時修正電壓的波形對比圖
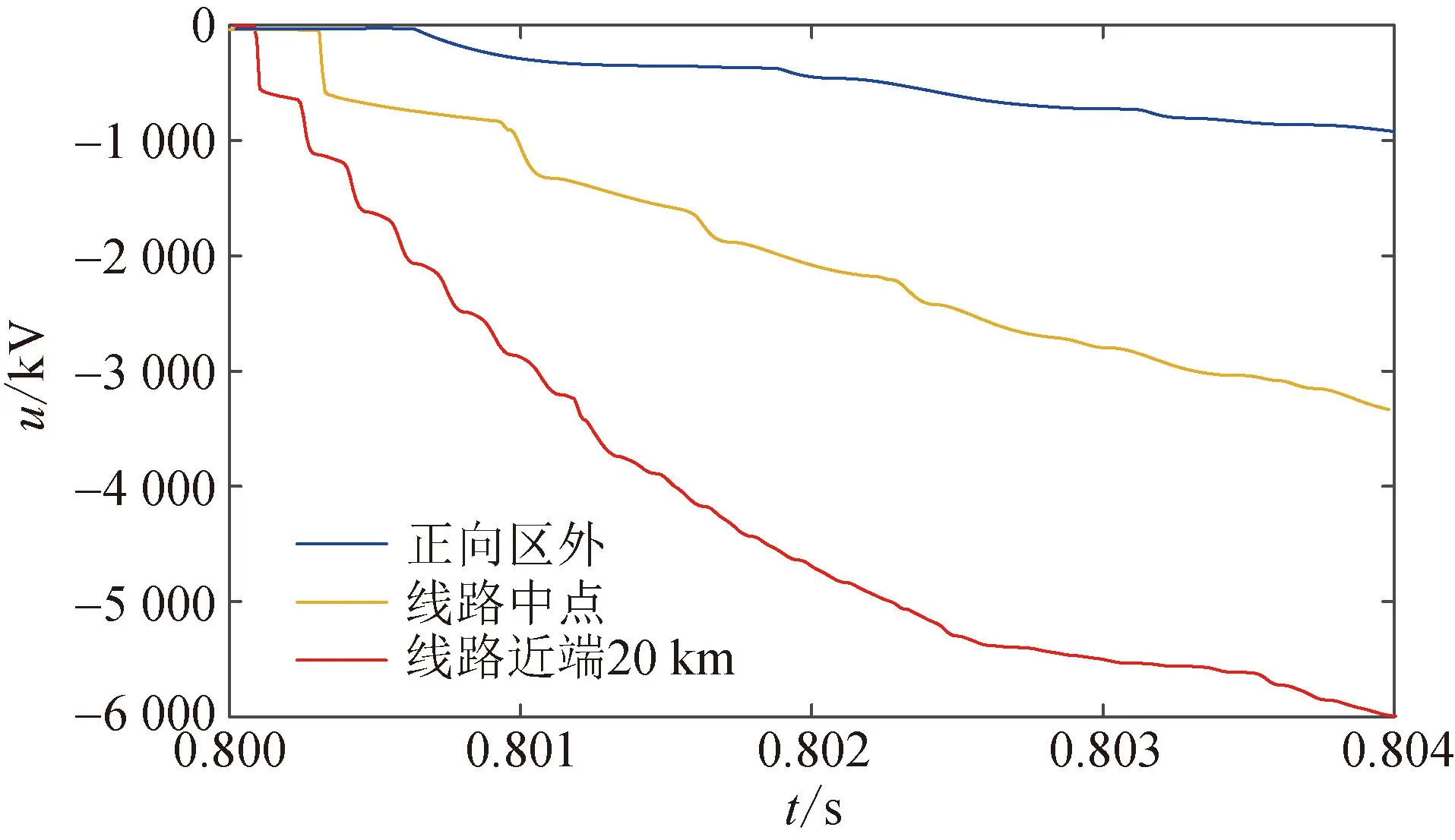
圖8 區內不同故障位置與區外修正電壓波形圖
3.2 啟動判據及故障選極判據
正常運行時,直流電壓基本不變;故障后,電壓波動劇烈。所以,可以以電壓幅值和電壓變化率的組合判據作為保護的啟動判據,如式(9)所示,判據經或門輸出,既保證可靠啟動,又避免頻繁的故障檢測。
(9)
式中:up、un分別表示正、負極電壓故障分量;K1set與K2set為整定閾值。選取K1set=500 kV/ms,K2set=30 kV。當連續三個采樣點均滿足啟動判據,保護才啟動。
本保護采用正、負極故障電壓累加值之比來實現故障選極,定義比例系數K3如下:
(10)
式中:K3set為大于1的常數,按照躲過區內末端發生接地故障時的K3最小值進行整定,并留有一定的裕度,最終根據仿真取得較為可靠的大小,選取K3set=2。
3.3 故障識別判據
由3.1節的分析可知,利用修正電壓可以較靈敏地對故障進行區分,且通過積分可以進一步擴大故障間的特征差距,有利于準確識別故障。定義故障識別判據,如式(11)所示。
(11)
式中:W1是數據窗長T內修正電壓uxz絕對值的累加和;N1為T內的采樣點數。為防止保護誤動,本判據連續動作5次,保護才動作。當W1大于等于整定閾值W1set,表明發生區內故障。
在線路上發生區內故障時,初始行波穿過MMC邊界,進入背側線路的折射波經過背側線路另一側的MMC反射回到保護安裝處后,在一定程度上削弱了修正電壓的故障特征。為了保證保護的高靈敏度,判據的數據窗應躲過初始行波在本側線路對端產生的反射波或在背側線路產生反射波到達保護安裝處的最短時間,因此數據窗口T應滿足以下條件:
T≤min{2l/v,2lijxl/v}
(12)
式中:l為故障線路長度;lijxl為保護Pij相鄰線路的長度;v為線模波速度,一般取2.95×108m/s。以Line41為例進行說明,在綜合考慮保護的可靠性和速動性的前提下,最終選取數據窗長T=0.5 ms。
3.4 方向判據
為了防止基于電壓的單端量保護出現在反向區外的近端發生故障時可能會誤動的情況,提出一種新的方向元件,以準確識別反向區外故障。圖9為線路Line41中點f2處發生金屬性短路故障時,保護P14、保護P12、母線保護Pm處的1模故障電壓u14、u12、um的故障初期理論波形。在行波到達MMC1邊界后,由于限流電抗器L14的分壓,保護P14處的電壓u14的幅值大于母線側電壓um的幅值;而當折射波進入相鄰線路Line12后,限流電抗器L12將吸收部分能量,大大降低了P12處的電壓u12的幅值和陡度,于是數毫秒內非故障線路Line12上P12處的電壓幅值小于母線處um的電壓幅值。
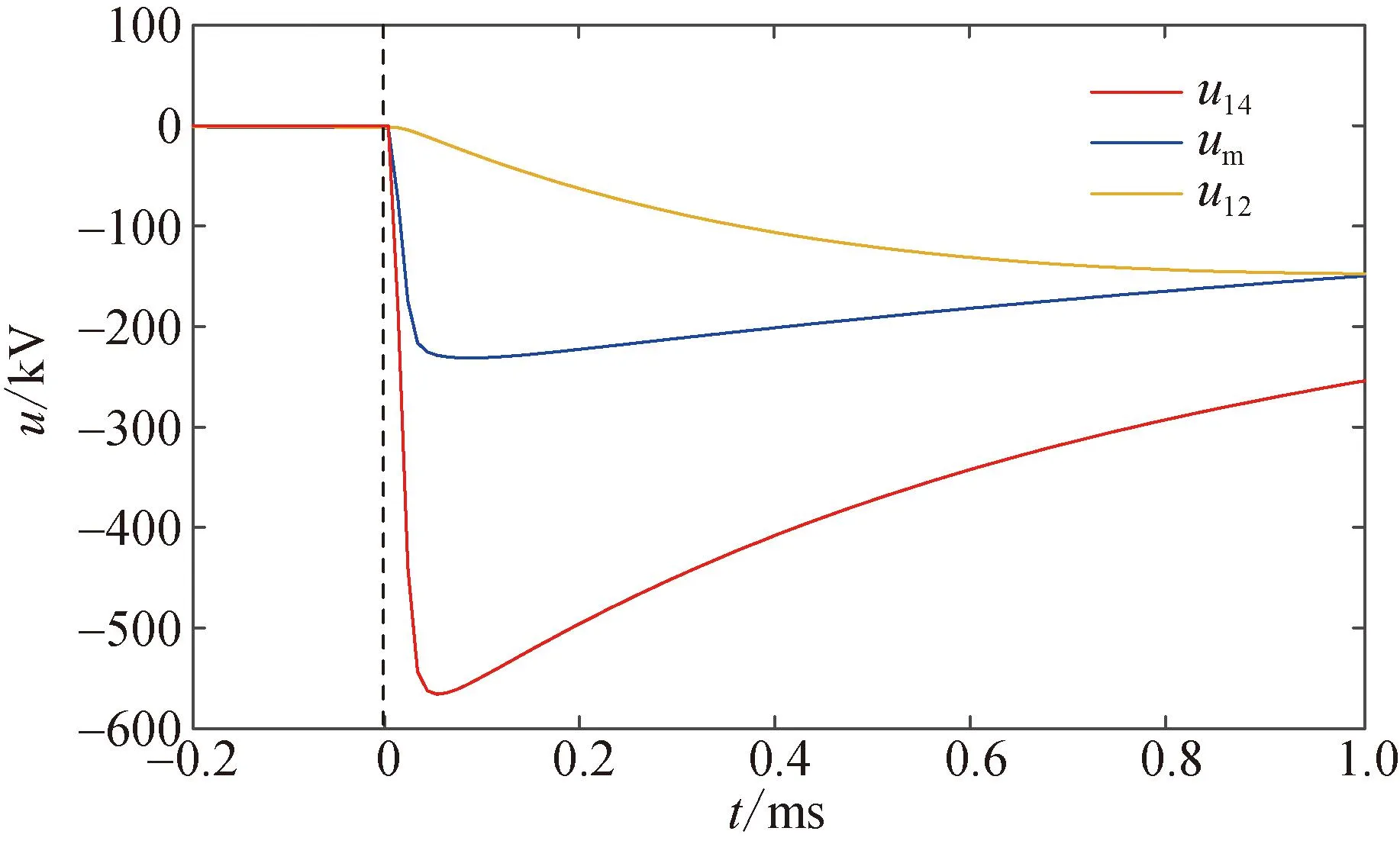
圖9 Line41上f2處故障u14、um及u12的計算波形圖
圖10為線路Line41的中點發生正極接地故障保護P12、P14及母線保護Pm安裝處的故障電壓和修正電壓波形對比圖。
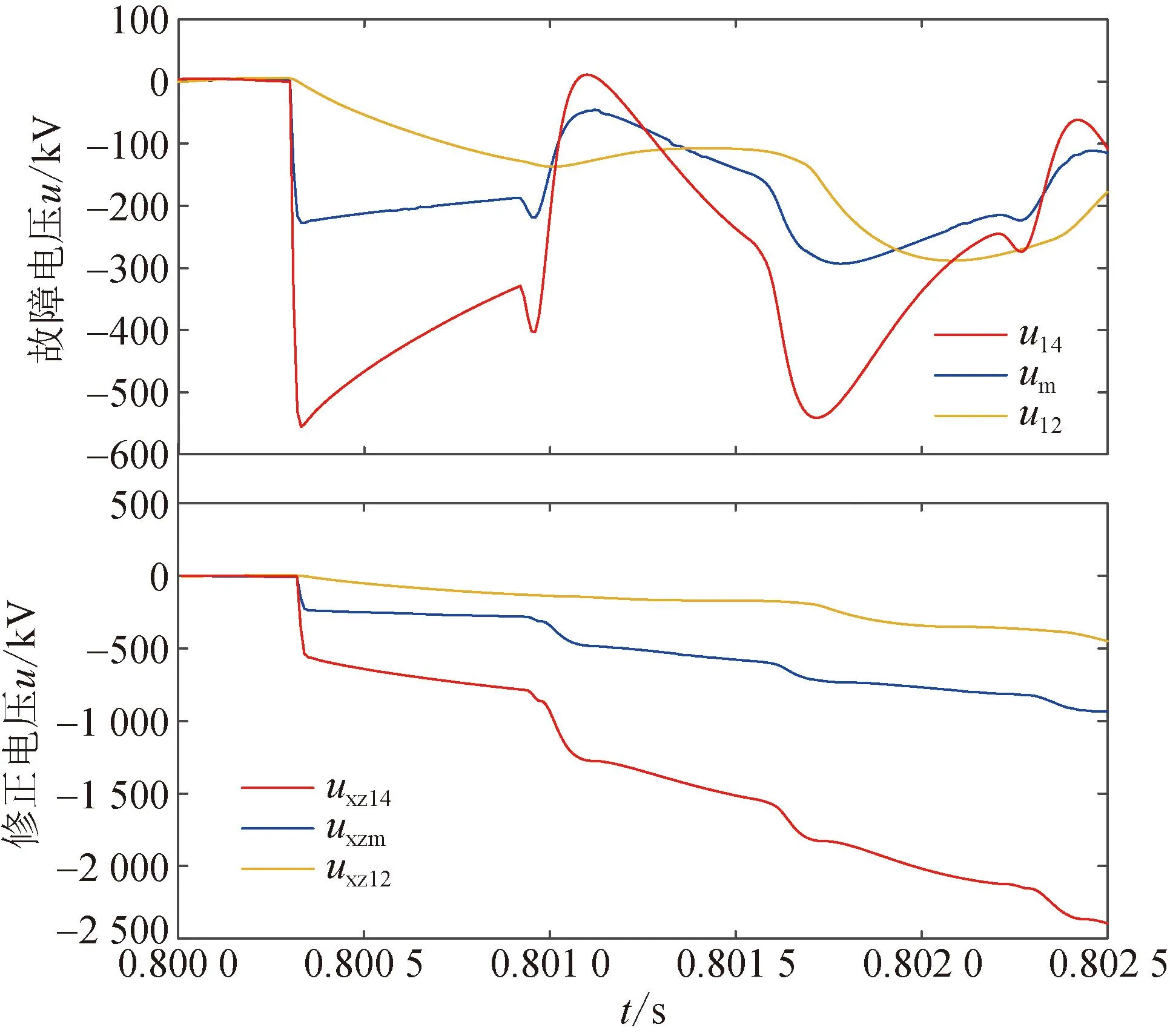
圖10 Line41上f2處故障P12、P14及Pm處的故障電壓、修正電壓波形圖
由圖10可知,該故障對于P14是正向故障,線路側修正電壓uxz14大于母線側修正電壓uxzm;該故障對于P12是反向故障,母線側修正電壓uxzm大于線路側修正電壓uxz12。根據正、反向故障下方向特征這一質的差別,定義一種新的方向元件:
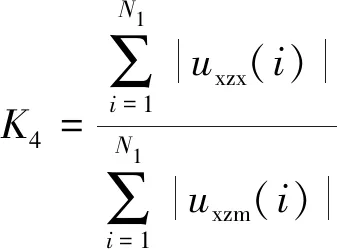
(13)
式中:uxzx(i)、uxzm(i)分別為限流電抗器的線路側、母線側修正電壓;K4>1為正向故障,K4<1為反向故障。
故障選擇判據的整定閾值要盡可能躲開區外故障,由于方向元件的作用,保護只需準確區分區內與正向區外故障即可。因此大大降低了單端量保護的整定難度,并相對提高了故障識別元件的靈敏度。
3.5 雷擊閉鎖判據
雷擊輸電線路的概率比較高,為避免保護在雷擊干擾下誤動,必須設計雷擊閉鎖判據。自然界中的雷電流多為負極性脈沖波,利用如式(14)所示的1.2/50 μs負極性雙指數雷電流模型模擬雷電干擾[41]。其標準雷電波一般如圖11所示,其中,T1=1.2 μs為(視在)波前時間,T2=50 μs為(視在)半峰值時間。
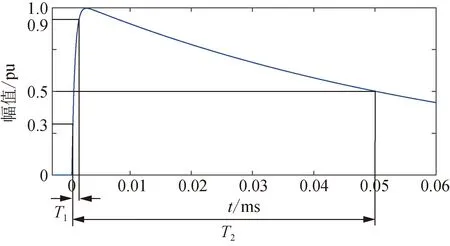
圖11 標準雷電流的波形圖
i(t)=ΛI0(e-αt-e-βt)
(14)
式中:I0為雷電流幅值;Λ、α與β為雷電流波的形狀參數。
雷擊干擾下,電壓故障分量迅速衰減,通常在極短時間內(100 μs)就已經衰減得很小,所以在較長時間窗長T3內電壓故障分量的平均值很小(此窗長仍取0.5 ms);而短路下故障電壓的波動較大,衰減較慢,所以在T3內的平均值較大。據此,在一定時窗內,定義故障電壓1模分量的衰減系數K5,如式(15)所示。
(15)
式中:u1(i)為保護安裝處故障電壓1模分量;N2為防雷判據時間窗長T3內的采樣點數。
設計雷擊閉鎖判據為:
(16)
式中:K5set為雷擊閉鎖判據的整定閾值,應躲過常見雷擊干擾下的最小K5,通過大量仿真,最終選取K5set=0.55。當K5大于等于整定閾值時,表明發生雷擊干擾,閉鎖保護。
3.6 后備保護原理
利用3.4節的方向元件提出一種縱聯方向后備保護,以可靠識別區內高阻故障。由前文可知,當K4大于1時,表明正方向發生故障,定義方向信息H為:
(17)
式中:W′1set為后備保護的整定閾值,應躲過正常運行情況下線路上可能出現的最大W1,通過大量仿真并留有一定的裕度,最終選擇W′1set=2 000 kV。
假設線路兩端的測量點分別為m和k,下式為后備保護的故障選擇判據。
(18)
式中:Hm、Hk分別表示m、k點的方向信息。
考慮到通信需要時間,且故障位置的變化會影響故障行波傳播到線路兩端的時間,所以后備保護的動作時限tact為:
tact=lc/vs+ll/vw+tDW+tx
(19)
式中:lc、ll分別為通信信道長度和傳輸線路長度;vw、vs分別為1模行波和信號的傳播速度;tDW、tx分別為保護所需數據窗和光電轉換、測量延時等所需時間總和。
以最長線路l23(211.3 km)為例計算后備保護動作時間,假設通信信道長度為1.5倍線路長度,tx設為0.1 ms,vw取295 km/ms,vs取200 km/ms[42],故障行波傳到對端用時約0.72 ms,信號傳輸用時約1.58 ms,tDW為0.5 ms,共用時2.9 ms,仍小于3 ms。
3.7 保護流程
根據3.2—3.6節的分析,可繪制保護流程圖,如圖12所示。保護啟動后,利用濾波算法處理故障信號,并進行極模變換。然后,判斷是否發生雷擊,若未發生雷擊,則根據式(13)判斷故障可能發生的方向,若判定為正方向故障,接著利用式(11)計算故障識別判據,若判定為區內故障,則利用式(10)進行故障選極;否則,認定為區外故障,主保護不動作,并等待后備保護的判別結果,若判斷故障發生于區內時,接著進行故障選極。最后,根據選極判據結果選擇正確的故障極,實現保護正確出口,切除故障。
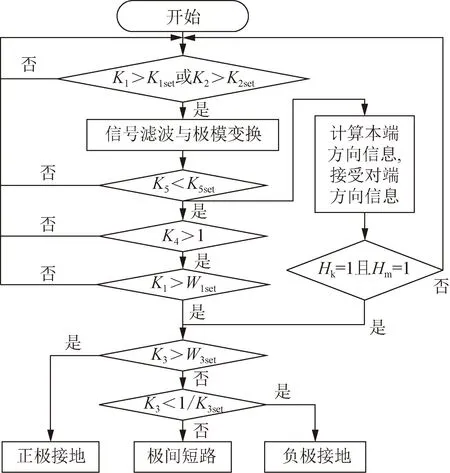
圖12 保護流程圖
4 仿真驗證
為驗證本文所提出新型保護原理的可行性,在PSCAD/EMTDC仿真平臺上搭建四端雙極對稱柔性直流系統模型,其系統拓撲及線路長度如圖1所示,表1為直流系統的主要參數,其中換流器的子模塊拓撲為半橋式結構。以線路Line41上的保護P14為例,研究不同位置發生故障時本保護原理的動作性能,故障位置如圖1所示。本方案的采樣頻率為100 kHz,本方案W1set應躲過正向區外故障時的最大W1max,通過仿真得到正向區外短路故障時出現的W1max=0.965×104kV,并保留一定的裕度,最終設置整定閾值W1set=1.150×104kV。
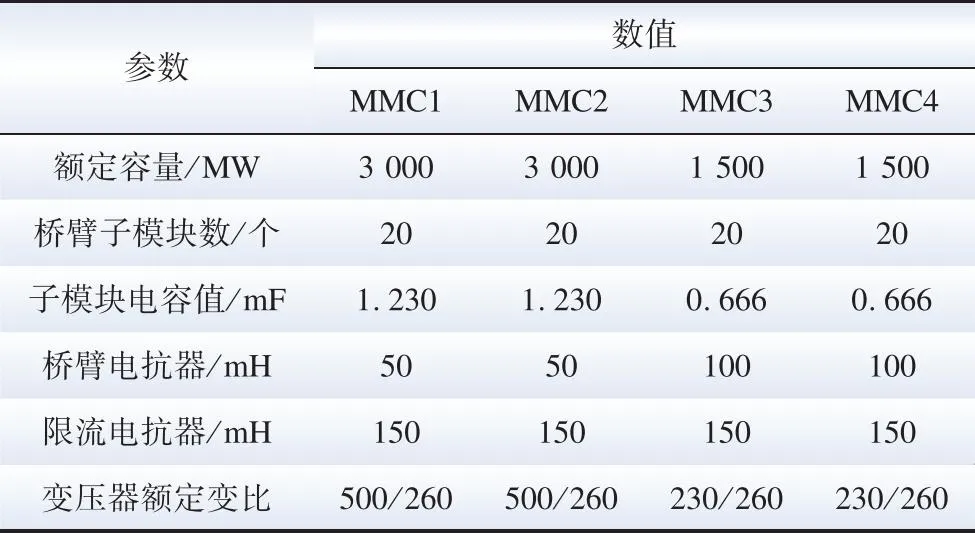
表1 各MMC的主要參數
4.1 區內故障驗證
表2為在線路Line41的不同位置發生經不同過渡電阻的正極接地短路故障的仿真結果,故障時刻均為0.8 s。由表2可得,區內金屬性短路故障時的W1均遠大于W1set,說明了本保護可以正確識別區內故障。區內故障時,主保護判據在距MMC1 3 km以上的線路能夠耐受300 Ω的過渡電阻。方向元件在不同位置發生經600 Ω過渡電阻正極接地短路故障時均能正確動作,因此基于其構成的后備保護可以準確地識別區內故障。
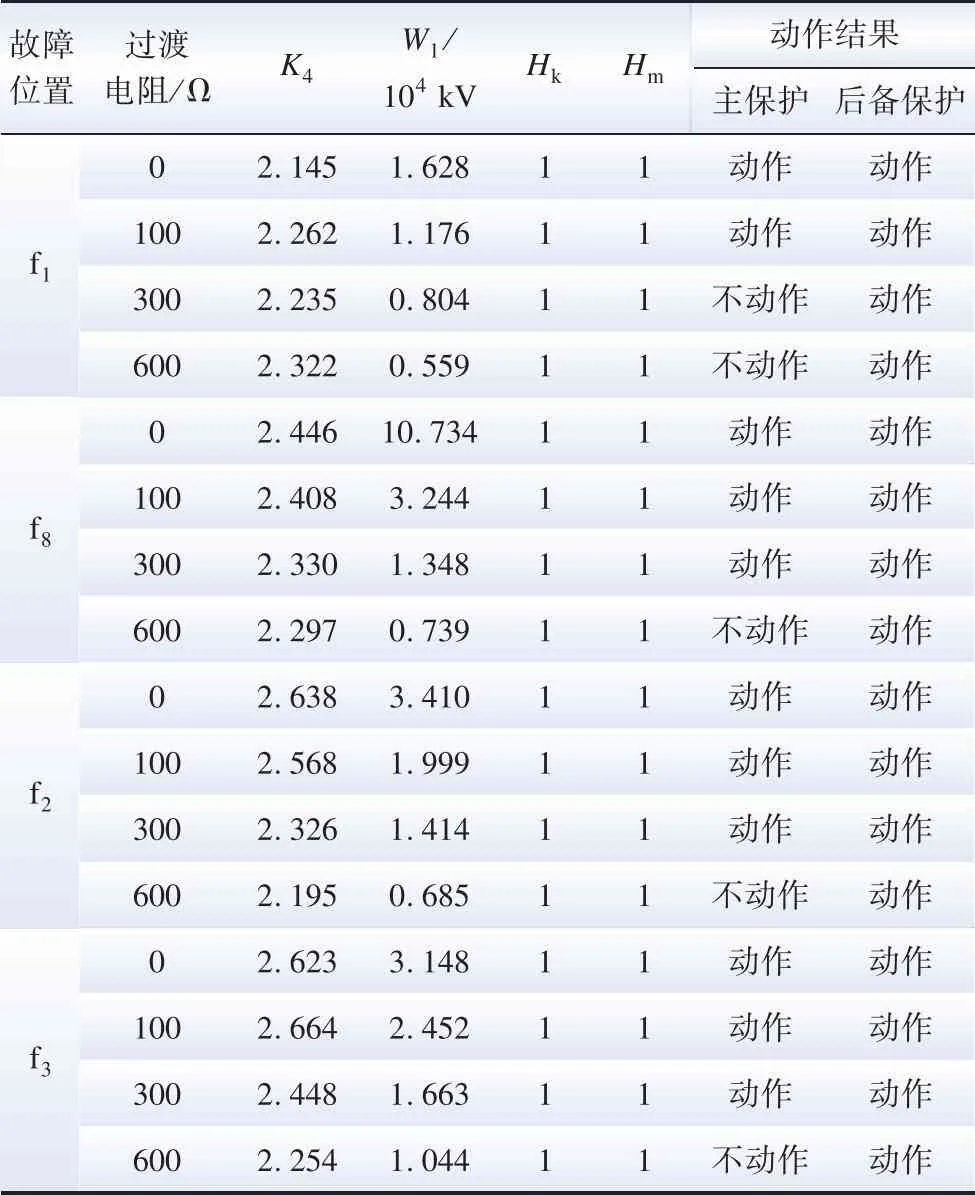
表2 區內不同故障位置下各保護判據的動作結果
短路故障發生在保護安裝處的近端時,行波的折反射幾乎不發生在故障點與線路邊界之間,導致保護安裝處的電壓變化率偏低,進而大大降低了主保護判據的靈敏度,主保護甚至存在拒動的情況,在高阻接地故障的場景下主保護拒動的情況尤為嚴重。雖然主保護在近端高阻故障下拒動,但后備保護不受故障位置和過渡電阻的影響,均能正確動作,所以在雙重保護的共同作用下,本方案仍能準確、可靠地識別故障。
表3為在直流輸電線路Line41的不同位置發生正極、負極和極間故障的選極判據的動作結果。從表中可以看出:正極故障時,K3遠大于2;負極故障時,K3遠小于0.5;極間短路故障時,K3接近于1,證明了本方案選極判據的正確性。
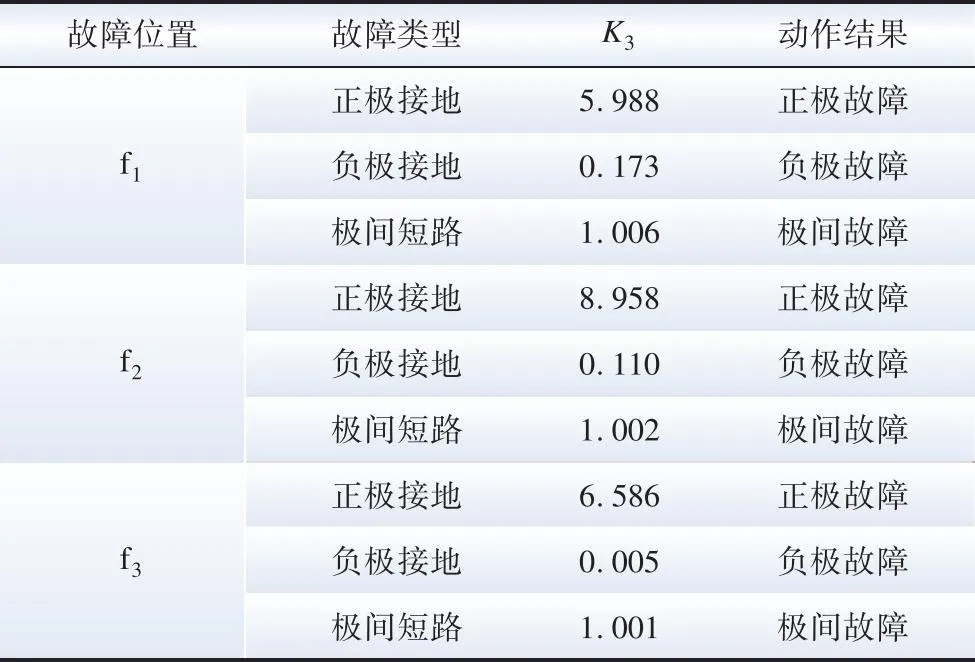
表3 不同故障類型下選極判據的動作結果
4.2 區外故障驗證
表4為不同位置的區外金屬性短路故障下各保護判據的動作結果。由表可得,反向區外故障時,K4<1,保護元件不動作;正向區外故障時,K4>1,但W1小于整定閾值,判別為正向區外故障,保護元件不動作,本方案可以準確區分區內故障和區外故障。
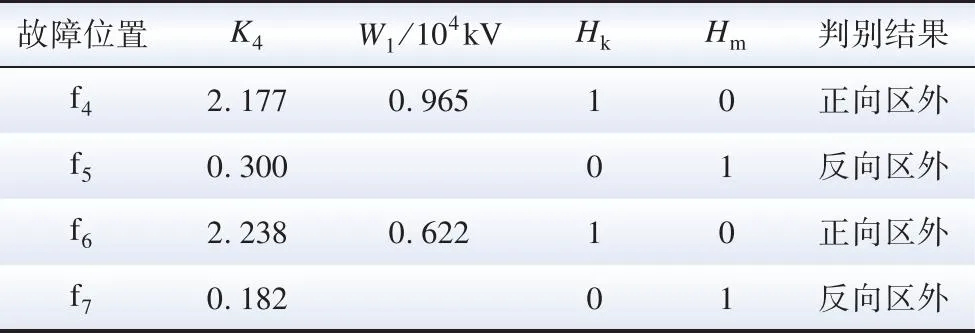
表4 不同區外故障下各保護判據的動作結果
4.3 雷擊干擾驗證
表5為在線路Line41上不同位置施加雷擊干擾與短路故障時保護P14閉鎖情況。
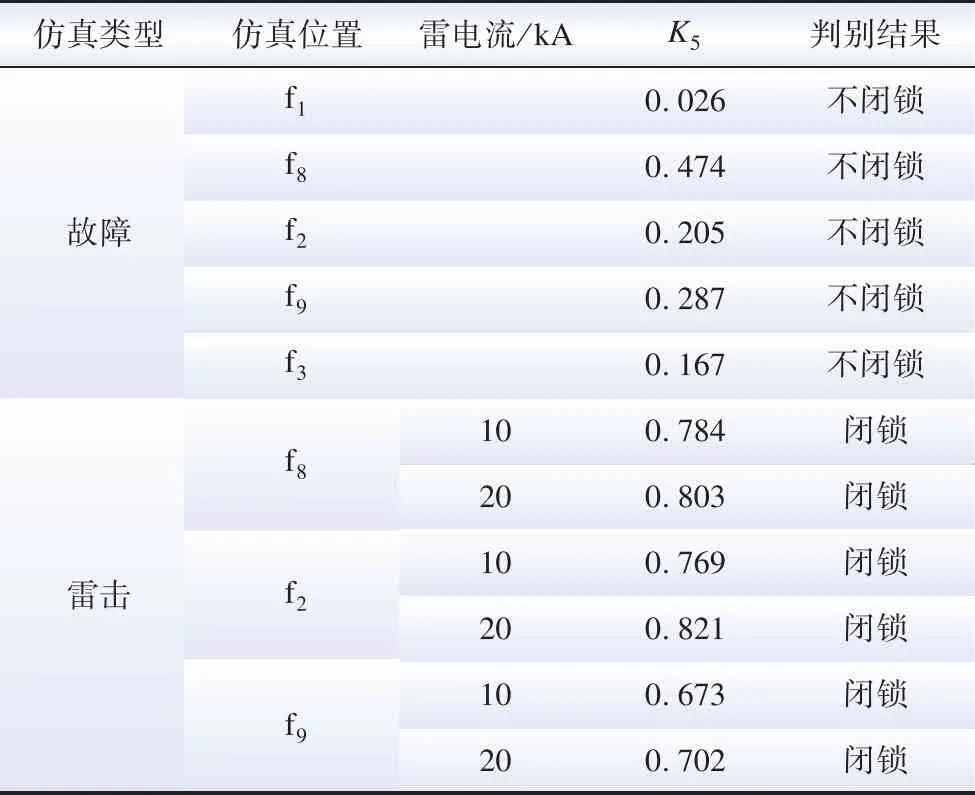
表5 雷擊干擾與短路故障下防雷判據的判別結果
表6為在線路Line41中點施加雷電流為10 kA的不同雷電波的雷擊干擾下的雷擊判據的結果。由表5、表6可得,故障時,K5均小于0.55;而雷擊干擾時,K5均大于0.55,故本文所提雷擊閉鎖判據能夠準確識別雷擊干擾和短路,本保護方案不會因雷擊干擾而誤動作。
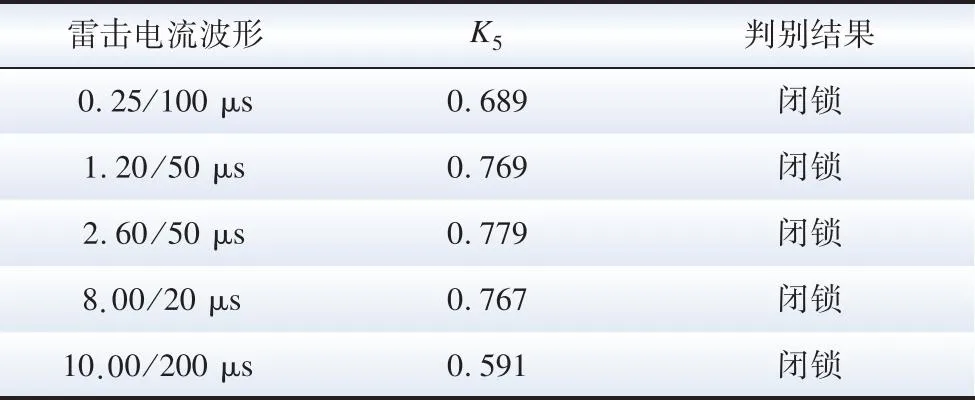
表6 不同雷擊電流波形下的防雷判據的判別結果
4.4 噪聲干擾驗證
小波濾波等算法具有較高的精度,能較好地剔除干擾信號。利用濾波算法對故障信號進行濾波,得到純粹的故障波形再進行故障識別,可以減小噪聲干擾對本保護方案的影響。本方案采用小波算法進行濾波,圖13為電壓信號濾波前后的對比圖。由圖可得,濾波后的電壓波形與原始波形高度一致,大大降低了噪聲干擾引起保護誤動的可能性。
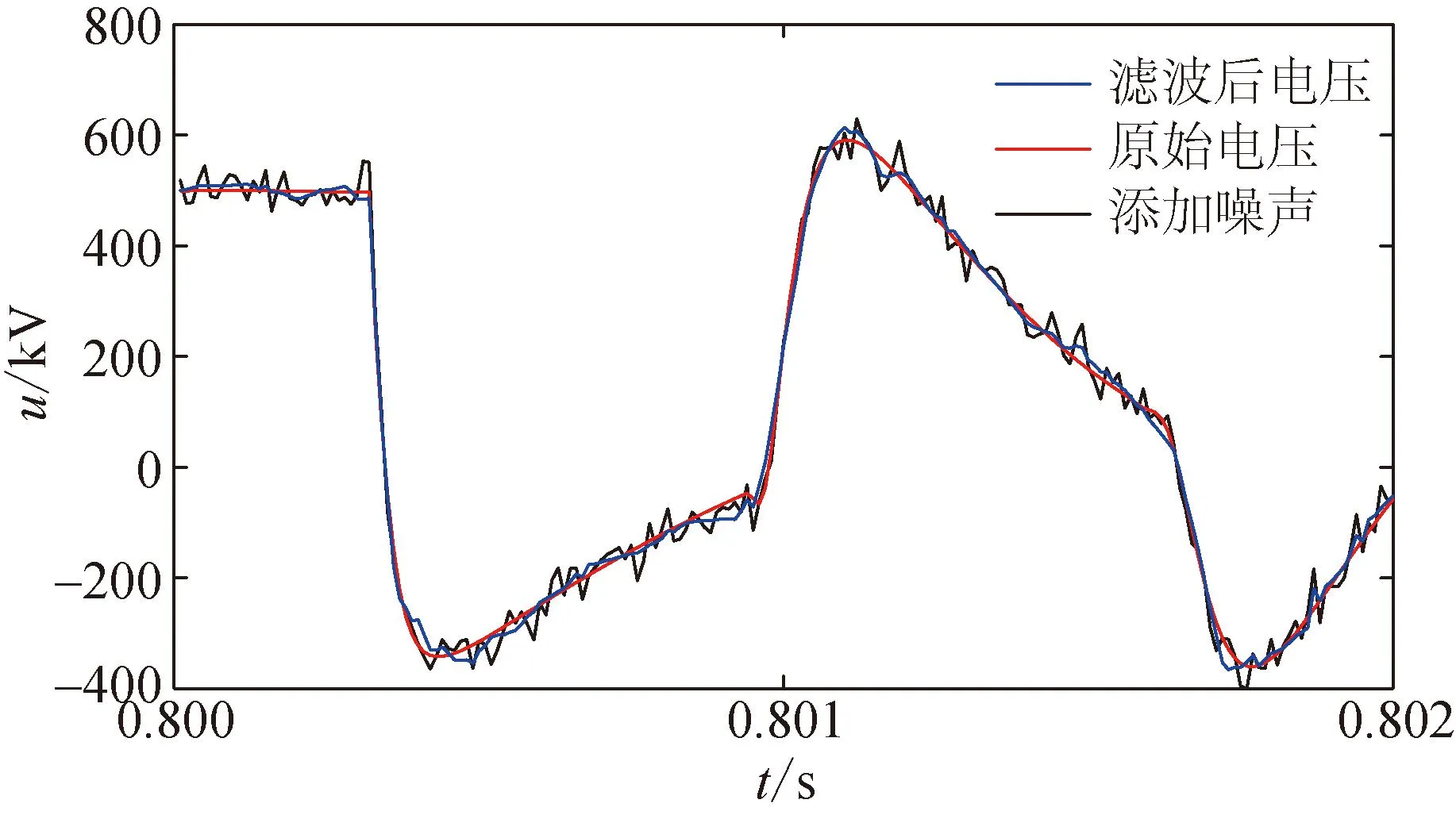
圖13 電壓信號濾波前后的效果對比圖
表7為將信噪比為20 dB的高斯白噪聲添加在不同位置短路故障下的電壓信號中,經小波濾波算法濾波后,本保護方案各種判據的動作結果。由表可知,在較大的噪聲干擾下,本方案仍能正確識別故障,具有較好的魯棒性。
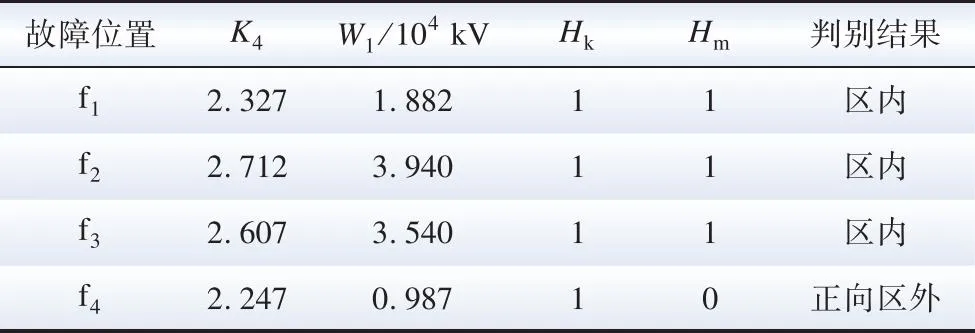
表7 噪聲干擾下保護判據的動作結果
5 結 論
本文分析了區內末端與正向區外故障的特征差異,設計了電壓修正算法,提出了一種基于修正電壓的新型暫態量保護原理作為主保護,并基于線路兩端的方向信息形成后備保護,形成了一套完整的主、后備保護方案。本保護方案具有一定的抗干擾能力和耐受過渡電阻的能力,且不依賴于成本較高且誤差較大的行波波頭捕捉。此外,由于本方案僅對電壓信號進行簡單運算,計算量小,因此大大降低了對數據采樣和數據處理的硬件要求,符合工程實際應用的要求。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39