機載一維相掃雷達空域穩定算法研究
2024-04-11 01:35:26劉心成張林讓
現代雷達 2024年2期
劉心成,張林讓,張 濤
(1. 西安電子科技大學 雷達信號處理國家重點實驗室, 陜西 西安 710071) (2. 中國電子科技集團公司第二十七研究所, 河南 鄭州 450045)
0 引 言
作為工程中常用的運動平臺,相比較于固定平臺,機載平臺由于飛機偏航、橫滾、俯沖、爬升等姿態變化或直線運動、轉彎、懸停等運動狀態改變,安裝在飛機平臺上的雷達波束指向也會隨之變化,這時如果不采取保持天線掃描空域穩定的措施[1],極易造成天線波束偏離目標區域,進而造成雷達測量精度下降甚至目標丟失。
傳統解決辦法一般是為雷達天線安裝硬件穩定平臺,比如多軸陀螺,將雷達天線運動和載機運動隔離開;安裝伺服穩定平臺,通過閉合伺服回路使得天線波束指向不受載機姿態影響;文獻[2]和文獻[3]對機載伺服穩定平臺系統進行了研究,介紹了伺服平臺保持空域穩定的原理和設計思路。但是,硬件穩定平臺存在體積大、笨重、造價高等缺點,控制精度和實時性也相對較差,因此未廣泛運用[4-5]。
現在多采用電子穩定技術,即采用基于數據處理的波束補償方法,通過分析平臺機動或擾動引起的目標區域與載機之間空間相對關系的連續變化,解算出目標區域相對雷達陣面的指向角變化,通過對其補償實現雷達波束穩定地指向目標區域。文獻[6]和文獻[7]探討了機載雷達涉及的各種坐標系變換,卻未探討載機姿態或運動狀態改變時波束指向角的變化規律。文獻[8]和文獻[9]研究了艦載相控陣雷達天線波束穩定照射的方法,討論了波束照射空域穩定時涉及的坐標變換,但不涉及相控陣波束控制移相碼的設計與計算方法。
文獻[10-12]闡述了固定平臺下相控移相碼的設計、計算與工程實現,但不適用于運動平臺,且缺少對波束指向精度的影響分析。文獻[13-14]研究了數字移相器量化位數和量化誤差對波束指向精度的影響,卻未推導出定量的計算公式。文獻[15]從波束覆蓋的角度推導了一種相控陣雷達數字移相器位數的選取準則,卻未探討移相器位數與波束指向精度的關系。
綜上所述,當前針對機載相控陣雷達保持相掃空域電子穩定的系統性研究論文相對較少。本文針對機載平臺運動引起雷達天線波束指向角的改變以及由此帶來的探測精度下降甚至目標丟失的問題,系統地探討了機載雷達采用方位相掃、俯仰頻掃和機掃相結合的方法保持空域穩定的波束控制方法,建立機載平臺下指向角變換的數學模型,推導出由于機載平臺運動引起波束指向角的變換公式,設計了方位相控掃描移相碼的實現方法,并對相控掃描的關鍵技術指標進行仿真分析,設計思路對工程中機載相控陣雷達波束控制設計具有非常重要的參考價值。
1 空域穩定模型
天線波束的相控掃描是相控陣雷達的重要組成部分,相控陣雷達的波束控制流程是波束控制板接收主控計算機下發的指向角信息,通過實時運算或者查表的方式獲得該波束指向下各移相器的移相值,然后驅動移相器移相,以實現天線各陣元的射頻激勵和接收信號的移相。當移相器移相值按照規律改變時,輻射到空間的波束指向隨之改變,從而實現了天線波束的相控掃描。
本文以某型機載雷達為例,方位上相位掃描,俯仰上頻率掃描和伺服機械掃描相結合,機載雷達波束控制的工作流程如圖1所示,波束控制系統接收主控計算機下發的地理坐標系下波束指向角信息,波束控制系統根據慣導測量的姿態數據值計算出雷達陣面坐標系下方位和俯仰波束的指向偏角,并結合通過近場測試獲取的雷達頻率與俯仰指向的對應關系生成方位上移相控制碼、俯仰上移頻控制碼和伺服控制碼,控制移相器實現方位上相位掃描,控制頻率和伺服實現俯仰上頻率掃描和伺服機械掃描。
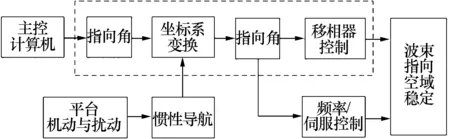
圖1 機載運動平臺波束控制流程
1.1 指向角變換
在雷達對目標的搜索、截獲、跟蹤和打擊過程中,坐標系問題關系到載機運動補償、波束穩定、波束預測、目標建航跟蹤和顯示等諸多問題。
雷達總體設計師通常給出地理坐標系下掃描空域的技戰術指標,即波束俯仰角、方位角和掃描范圍等信息,而波束控制設計師一般在雷達陣面坐標系下研究天線的掃描特性[16]。因此坐標變換是必不可少的技術環節。
機載雷達指向角變換一般需要經過以下步驟[17]:
(1) 由地理極坐標系變換到地理直角坐標系;
(2) 依次旋轉載機航向角、俯仰角、橫滾角得到載機坐標系;
(3) 載機坐標系平移,并依次旋轉安裝角、安裝誤差得到雷達陣面直角坐標系;
(4) 雷達陣面直角坐標系轉極坐標系得到波束的驅動角。
建立地理坐標系O-XgYgZg,坐標原點O取在地面,Xg軸指向東,Yg軸指向真北,Zg軸鉛垂向上,O-XgYgZg構成右手直角坐標系。地理坐標系下目標坐標矢量為OT,載機坐標矢量為OJ,那么雷達天線的最佳波束指向矢量為JT。
建立飛機載體坐標系Ob-XbYbZb,坐標原點Ob取飛機質心,Xb軸指向飛機右側,Yb軸指向機頭方向,Zb軸沿載體法線向上,Ob-XbYbZb構成右手直角坐標系。飛機載體坐標系與地理坐標系的關系可以由俯仰角、航向角和橫滾角等姿態角來確定。
雷達與飛機平臺采用剛性連接,初始安裝時雷達載荷相位中心和一維俯仰伺服零點對齊,天線陣面法線方向與飛機載體坐標系平行,那么雷達陣面坐標系與飛機載體坐標系平行。
雷達工作時以地理坐標系下視角ψ進行方位向電掃描探測,下視角由主控計算機下發,雷達與照射區域幾何關系示意圖如圖2所示。
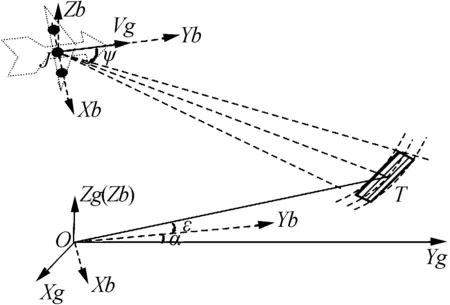
圖2 機載雷達波束照射區域幾何圖
定義角度如下:
(1)下視角ψ:地理坐標系下雷達和目標連線與水平面之間的夾角,由主控計算機輸入雷達,機載雷達地面目標探測時下視角為負值;
(2)姿態角:由慣性導航測量后輸入,包括航向角α,左航為正;俯仰角β,抬頭為正;橫滾角γ,右滾為正;
(3)目標方位角ε:地理坐標系下目標區域與機頭在水平面的投影之間的夾角,左偏為正。
由此得到在地理坐標系下,飛機指向目標區域的方向矢量JT為
(1)
在雷達陣面坐標系下該方向矢量為
(2)
在雷達陣面坐標系下,雷達指向目標區域,天線波束方位角記為θ,天線波束俯仰角記為φ,那么得到波束指向角
(3)
方位角以飛機機頭方向為零值,左偏為正,范圍為-π~π,那么得到
(4)
特別地
(5)
俯仰角φ以機體坐標系XbObYb所在面為零值,向上為正值,范圍為-0.5π~0.5π。
因此雷達方位相控掃描即是按照指向角θ進行移相碼計算,下發給各移相器,驅動移相器移相,實現天線波束方位上對準目標。俯仰上雷達按照指向角φ進行頻控和伺服掃描,根據天線設計師測量的工作頻率與俯仰指向角的對應關系,在俯仰頻率掃描無法指向目標區域時,控制伺服機械轉動實現目標區域的俯仰對準。
由于坐標變換涉及矩陣乘法、正切等三角函數變換,更適合使用計算機或浮點數字信號處理器(DSP)進行計算。實際工程中可以由主控計算機計算完成后通過網絡等接口下發控制碼以減少硬件復雜性,當然也可以采用嵌入式浮點DSP計算。
1.2 移相碼設計
方位上波束控制系統根據天線波束指向角θ,計算出天線各移相器單元的移相值,再轉換為移相器的控制碼,搭配移相器工作時序信號,驅動移相器進行移相,最終實現在指向角θ方向的定向輻射與接收。
1.2.1 陣元排布
方位上機載雷達采用一維均勻線陣在指定方向上的同相射頻激勵和接收,以實現空間波束的定向輻射和接收。
考慮N個陣元組成的一維均勻線陣[18],如圖3所示,陣元間距為d,電磁波入射角θ,那么相鄰兩陣元之間電磁波延遲時間為
(6)
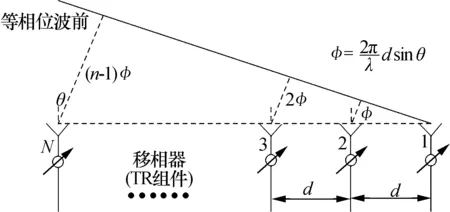
圖3 陣列單元排布示意圖
考慮到電磁波工作頻率f,工作波長λ,那么由于時間差造成的相位差為
(7)
由式(7)可以看出,相鄰兩天線陣元對同一方向接收或者輻射的電磁波相位差是固定值,為工作波長和入射角θ的函數,調節陣元相位差值則θ也相應改變,進而控制天線波束指向特定方向,這就是通過相位控制實現波束掃描的原理。
考慮到工程中天線的加工、組件焊接、線纜不等長等誤差,各個天線陣列收發通道之間具有幅相不一致性,記通道初始相位值φ0n,該值可以通過矢量網絡分析測試得到。忽略溫度變化、線纜反復彎曲等造成的相位變化,頻點一定時該值是固定的,補償幅相誤差后,各個移相單元實際移相值為
(8)
1.2.2 移相碼設計
工程中有源相控陣天線一般采用內部集成數字移相器的TR組件進行數字移相,移相范圍一般為0~2π。假設移相器位數為k,那么其相移值是離散的,為最小相移理論值2π/2k的整數倍,因此數字移相器的移相步進和移相精度都受限于移相器位數,由此帶來移相誤差,進而對波束形成帶來一定的性能損失[19]。
那么移相器理論移相值為
(9)
量化k為位控制碼為
(10)
可見移相控制碼是波束指向角θ、工作頻率f、通道序號n、通道初始相位φ0n和移相器量化位數k的函數,其中波束指向角θ和工作頻率f是變量,其他是常量。天線移相碼計算就是在給定波束指向角θ和工作頻率f的情況下,計算天線陣列各個移相單元(通道序號為1,2,…,N)的移相控制碼。
1.3 移相計算的工程實現
移相器控制碼的計算有多種實現方式,文獻[20]采用查表法,即將所有波位和頻點的組合對應的移相控制碼預先計算好,存儲在片上存儲器中,然后根據頻點和波位的索引進行查找,送到對應移相器上。查表法在控制規模比較小時方便快捷,但控制規模增大時所需存儲量較大,且控制碼傳輸時間過長;文獻[21]采用DSP芯片架構實現,由于DSP程序順序執行的特性,該方法多在小規模一維線陣中使用,此時配相碼計算響應時間尚在可接受范圍之內,且調試效率較高;也可以采用專用ASIC波束控制芯片[22],多用于批產項目,但靈活性差,且在研發階段成本較高;采用現場可編程門陣列(FPGA)芯片架構,由于其豐富的DSP、IO、邏輯資源以及并行運算特性,成本和調試效率適中,非常適用于小批量生產或者試驗驗證項目中,本項目采用FPGA架構實現。
由前述公式可以設計出浮點運算的移相碼,如圖4所示。
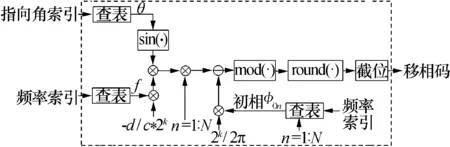
圖4 移相碼浮點運算
移相碼計算單元根據輸入的頻率和指向角索引得到相應的工作頻率f和指向角θ,然后順次相乘得到單通道相位、N個通道相位、初始相位補償、取模、四舍五入,最后截取低k位即得到移相控制碼。
浮點運算可以保證很高的運算精度,對運算緩存要求比較高,由于正余弦等非線性運算在各類處理器架構中都屬于耗時非常大的運算,因此移相碼浮點算法在運算實時性要求比較高時難以滿足快速計算和波束掃描的需求[12]。
相比較浮點運算,FPGA更適合做定點運算,更適合實現簡單規整的算法。為提高運算時效性,有必要將浮點運算轉換為定點運算算法,并盡量簡化運算過程,提高移相碼運算效率,由此浮點移相碼計算公式可以進一步化簡為
(11)
可以看出,定點移相碼的計算仍然涉及到正弦三角函數計、乘法運算、除法運算、取算及加減法運算,運算流程相對復雜,在FPGA中實現較為麻煩,同時也會消耗大量資源。為提升系統性能,有必要再次將定點移相碼中的三角函數、乘法、除法、取模等運算進行簡化,降低運算過程復雜度,FPGA算法優化后如圖5所示。
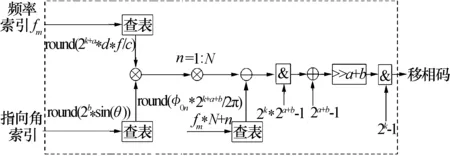
圖5 移相碼定點運算
其主要步驟有:
1) 將移相碼計算中的浮點型數據轉換為整型數據。其具體步驟為:
(1) 將算法中涉及的浮點型數據進行等比例放大,比如分別放大2a和2b倍;
(2) 將放大后的浮點型數據進行四舍五入處理,轉換為整型數據。
2) 使用查表法簡化運算過程。將預先可確定的乘除法運算值和正弦運算值進行整形處理后存入FPGA中ROM,省略掉復雜的三角函數運算并減少乘除運算環節,降低系統復雜度,提高運算速度;
3) 使用邏輯與、右移等操作簡化取模、除法和四舍五入運算。在FPGA中將二進制補碼值與模值按位邏輯與操作即可實現取模運算;將定點的二進制補碼值加上0.5并右移就能實現除法和四舍五入運算;如此則省略掉運算中的分支判斷和加減運算,大幅降低系統運算復雜度。
2 關鍵指標驗證與分析
至此,完成了機載相控陣雷達保持方位波束電子穩定的移相碼設計,實現了在當前運動姿態和狀態下,對目標空域覆蓋的波束控制,下面對天線掃描的關鍵技術指標進行驗證分析。
2.1 移相碼計算精度
移相碼計算的精度與浮點數轉定點過程中的四舍五入直接相關,當擴大倍數2a+b越大,則四舍五入的舍入誤差越小,算法的計算精度越高。
以表1所示的陣列參數為仿真輸入,FPGA定點運算和Matlab浮點運算結果進行對比,放大倍數2a+b與移相碼計算誤差關系示意圖如圖6所示。

表1 移相碼計算仿真輸入
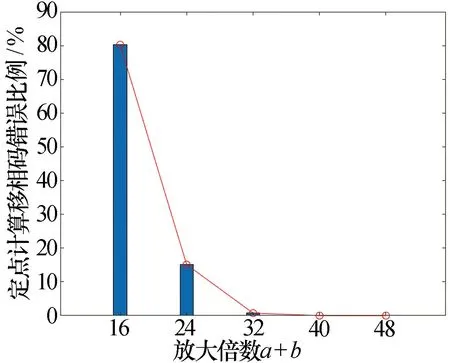
圖6 放大倍數與移相碼計算誤差的關系
由圖6可以看出,隨著放大倍數的增加,定點運算錯誤的比例在逐漸減少,當擴大倍數為240時候,FPGA計算結果與Matlab浮點運算結果完全一致,這一結果在圖7~圖8的仿真結果中得到驗證。
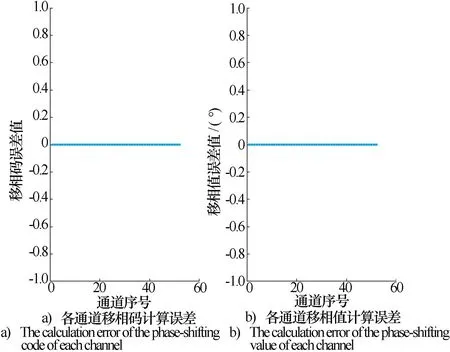
圖7 放大240倍時所有通道的移相計算誤差
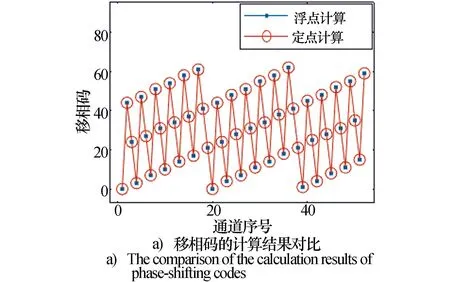
圖8 放大240時某頻點/波位所有通道移相碼計算
圖7仿真結果表明,在定點放大倍數為240時,所有輸入頻率和波位的組合下定點計算的通道移相碼和移相值誤差與浮點完全一致,誤差為0。圖8中結果表明采用定浮點計算的移相碼和移相值完全一致。
2.2 移相碼計算時間
移相碼計算時間直接影響波束指向的轉換速度,縮短移相碼計算時間對提升雷達系統波束轉換的實時性具有重大意義,特別是雷達工作于短時序、高數據率時對波束轉換時間具有很高的要求。
進行N個移相單元的移相碼計算,所需時間與通道計算時鐘fN有關,所有通道移相碼計算時間N/fN。以100 MHz計算時鐘頻率計算,完成52個移相單元的移相碼計算時間僅為520 ns。
在FPGA中,還可以通過以下方式進一步縮短移相碼計算時間:
(1) 通過提高計算時鐘,進一步縮短移相碼計算時間;
(2) 發射和接收移相碼并行運算;
(3) 陣元特別多時,可以通過合理劃分子陣,子陣間并行運算,子陣內順序運算,從而縮短運算時間。
2.3 波束指向精度
由于采用數字移相器,k位移相器只能產生為最小相位2π/2k整數倍的相移量,因此移相值是離散的,不是任何相移值都能在數字移相器上準確地移相,由此將導致合成的波束指向與真實值產生偏差[23]。當采用FPGA定點運算,放大參數為a=b=20時,定點運算計算的移相碼是無偏差的。如圖9所示,采用6位數字移相器,仿真波束指向在-30°~30°范圍內掃描時,可以看到波束指向誤差小于0.06°。
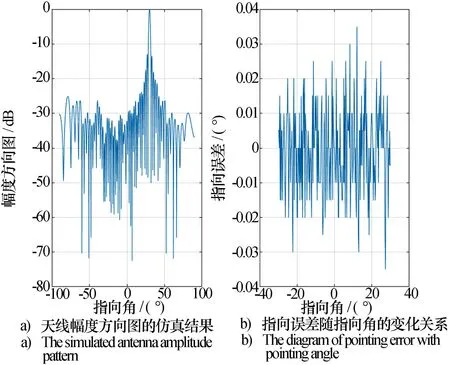
圖9 使用6位移相器的指向精度
2.4 移相器位數與指向精度的關系
數字移相器是現代相控陣雷達系統的必備部件,它的相位控制位數在很大程度上決定了相控陣雷達的造價、性能和設備的復雜性。因此在制定相控陣雷達方案時,合理地選擇二進制數字移相器的相位控制位數是一個值得重視的關鍵問題。
數字移相器具有結構簡單、低能耗、移相速度快、移相值穩定、控制電壓低等優點,但它不能連續移相,由此存在相位量化誤差[24]。相位量化誤差一方面影響相控陣天線波束的主瓣電平,使得主瓣波束展寬,增益降低,降低了天線的抗干擾能力;另一方面影響了天線波束的指向,由于量化誤差造成天線各移相單元實際饋電相位與理論值之間出現偏差,進而造成波束指向偏離理論值,造成指向誤差,降低了天線波束的指向精度[25]。
由一維均勻線陣相位差與指向角的計算公式
(12)
對公式兩邊求導,得到
(13)
對于k位數字移相器,移相器理論移相最小步進值為2π/2k,移相精度小于最小步進值,那么得到
(14)
在不考慮其他誤差的情況下,即得到由于移相器量化誤差引起的指向精度理論最大值
(15)
可以看到,指向精度與指向角余弦及2k成反比,與電磁波工作波長成正比。以頻率16 GHz為例,移相器位數分別為4、5、6,指向角為-30°~30°,仿真一維均勻線陣波束方向圖指向精度,仿真結果如圖10所示。
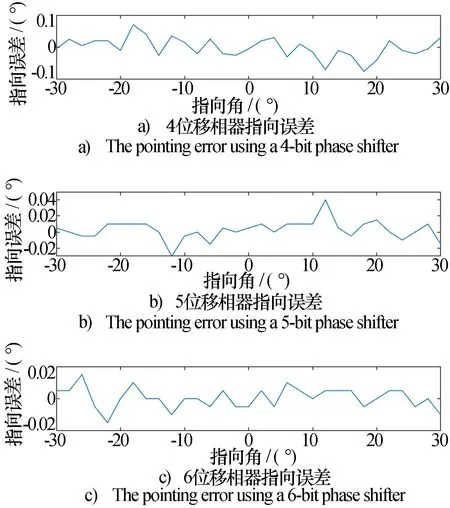
圖10 移相器位數與波束指向精度的關系
可以看出,隨著移相器位數的增加,波束指向精度也在提高,仿真結果與公式推導的計算結果在同一個量級,驗證了移相器位數對指向精度影響的正確性。
2.5 空域穩定算法有效性仿真
機載平臺由于偏航、橫滾、俯沖、爬升等或直線運動、轉彎等運動狀態改變,目標區域與機載雷達的空間關系也隨之連續改變,如果此時不采取保持天線掃描空域穩定的措施,極易造成天線波束偏離目標區域,并造成雷達測量精度下降甚至目標丟失。
采用表2參數對空域穩定算法進行仿真,解算出雷達波束指向角信息如表3所示。

表2 算法仿真輸入
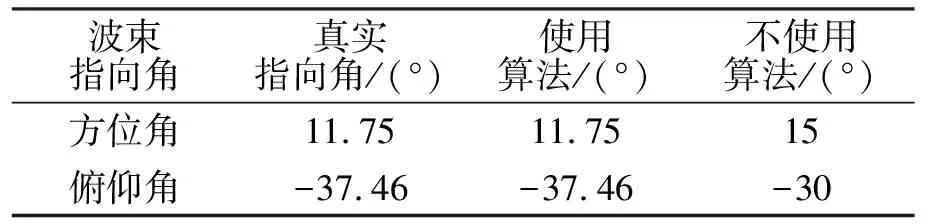
表3 算法仿真輸出
通過仿真可以看出,在機載平臺姿態角變化時,雷達波束的真實指向角已經改變。不采用空域穩定算法時,雷達波束將繼續指向方位15°、俯仰-30°區域,此時雷達波束已經事實上嚴重偏離了目標區域,進而造成目標丟失。采用空域穩定算法時,首先解算出載機姿態變化后雷達波束的真實指向角(方位11.75°、俯仰-37.46°),由于俯仰角已經超出了頻掃范圍,因此需要根據頻率與俯仰指向對應關系調整伺服角度實現俯仰波束的正確指向。方位11.75°仍在相掃范圍之內,為相掃真實角度,直接將其生成移相碼控制移相器進行移相,從而實現方位上目標空域的正確對準。
3 結束語
機載相控陣雷達是雷達發展的重要方向,當雷達在目標探測跟蹤的過程中,由于平臺姿態和運動狀態的改變,造成雷達波束指向可能偏離目標甚至丟失目標,因此需要對雷達波束指向進行補償以保證雷達波束指向的空域穩定。
本文對機載平臺運動對波束指向角的影響進行數學建模,通過引入慣導測量的平臺姿態信息對天線指向角進行實時修正與補償,設計出天線波束相控掃描的移相碼,并對波控控制的關鍵指標進行了仿真驗證。結果表明,該算法可靠有效,計算精度和實時性高,設計思路可以推廣到其他運動平臺雷達系統中,對于運動平臺雷達系統波控設計具有十分重要的參考意義。