一種基于TRT-SKT-HAF的變加速目標(biāo)快速相參積累算法
2024-04-11 01:35:34陳洪猛
現(xiàn)代雷達(dá) 2024年2期
關(guān)鍵詞:信號(hào)
陳 鍇,喬 良,李 明*,陳洪猛
(1. 西安電子科技大學(xué) 雷達(dá)信號(hào)處理國(guó)家重點(diǎn)實(shí)驗(yàn)室, 陜西 西安 710071) (2. 北京無線電測(cè)量研究所, 北京 100854)
0 引 言
隨著現(xiàn)代科學(xué)技術(shù)的不斷發(fā)展,越來越多的高速機(jī)動(dòng)目標(biāo)出現(xiàn)在戰(zhàn)場(chǎng)中,這類目標(biāo)具有高速、強(qiáng)機(jī)動(dòng)和弱回波能量等特征,對(duì)傳統(tǒng)雷達(dá)的檢測(cè)性能提出了嚴(yán)峻的挑戰(zhàn),為此高速機(jī)動(dòng)目標(biāo)的檢測(cè)以及高精度運(yùn)動(dòng)參數(shù)估計(jì)的研究受到了學(xué)術(shù)界的廣泛關(guān)注[1-3]。長(zhǎng)時(shí)間相參積累可以有效提高此類目標(biāo)的檢測(cè)概率,然而由于目標(biāo)的機(jī)動(dòng)性,目標(biāo)在積累時(shí)間內(nèi)會(huì)產(chǎn)生距離走動(dòng)(RM)和多普勒徙動(dòng)(DFM)現(xiàn)象,嚴(yán)重影響相參積累的性能[4-6]。
在目前的勻速目標(biāo)檢測(cè)算法中,文獻(xiàn)[7]提出利用一階keystone變換(KT)來解決目標(biāo)在長(zhǎng)時(shí)間內(nèi)的RM現(xiàn)象,該方法無需掌握目標(biāo)的運(yùn)動(dòng)參數(shù)信息,僅通過尺度變換就可實(shí)現(xiàn)RM校正,但KT在校正高速目標(biāo)的RM時(shí),需要對(duì)速度模糊數(shù)進(jìn)行搜索,加大了運(yùn)算復(fù)雜度。文獻(xiàn)[8]提出Radon傅里葉變換(RFT)方法對(duì)目標(biāo)運(yùn)動(dòng)參數(shù)進(jìn)行搜索以實(shí)現(xiàn)相參積累,然而由于離散脈沖采樣、有限的距離分辨率以及積累時(shí)間受限等原因,RFT的積累結(jié)果容易產(chǎn)生峰值較高的盲速旁瓣(BSSL),導(dǎo)致嚴(yán)重虛警。以上兩個(gè)方法在忽略目標(biāo)機(jī)動(dòng)性,僅考慮目標(biāo)速度的情況下均能實(shí)現(xiàn)線性RM校正和目標(biāo)能量積累,但無法解決目標(biāo)加速度引起的DFM。
針對(duì)勻加速目標(biāo)產(chǎn)生的DFM,許多學(xué)者在KT和RFT變換的基礎(chǔ)上提出了很多有效的算法,如文獻(xiàn)[9]利用線性距離徙動(dòng)矯正去除線性RM和多普勒中心頻率,然后采用二階keystone變換(SKT)來補(bǔ)償距離彎曲。文獻(xiàn)[10]通過一階KT校正目標(biāo)速度引起的RM,隨后進(jìn)行多普勒中心頻率估計(jì)與補(bǔ)償,最后利用SKT校正加速度引起的距離彎曲,但文獻(xiàn)[9]和文獻(xiàn)[10]均未考慮多普勒模糊問題,不適用于高速目標(biāo)。文獻(xiàn)[11]研究了多普勒模糊下的高速機(jī)動(dòng)目標(biāo)相參積累問題,提出了基于SKT-RFT的相參積累算法,該算法利用SKT校正距離彎曲后,通過分?jǐn)?shù)階傅里葉變換補(bǔ)償DFM,最后利用RFT實(shí)現(xiàn)相參積累。然而SKT-RFT對(duì)RM的校正以及多普勒走動(dòng)的補(bǔ)償是分步進(jìn)行的,因此低信噪比(SNR)條件下算法的積累性能會(huì)嚴(yán)重下降。文獻(xiàn)[12]提出了基于Radon分?jǐn)?shù)階傅里葉變換(RFRFT)的相參積累算法,該算法可實(shí)現(xiàn)低SNR下的微弱目標(biāo)檢測(cè),但需要在距離-速度-加速度域上進(jìn)行三維搜索,提高了計(jì)算復(fù)雜度。
針對(duì)變加速運(yùn)動(dòng)目標(biāo),不僅存在DFM,還會(huì)產(chǎn)生多普勒彎曲。為此,文獻(xiàn)[13]提出了具有任意參數(shù)化機(jī)動(dòng)目標(biāo)的廣義RFT變換(GRFT)。但是,GRFT需要多維搜索目標(biāo)的運(yùn)動(dòng)參數(shù),運(yùn)算復(fù)雜度很大,并且會(huì)出現(xiàn)BSSL導(dǎo)致虛警。文獻(xiàn)[14]提出一種基于Radon分?jǐn)?shù)階模糊函數(shù)(RFRAF)的變加速目標(biāo)相參積累算法,該算法對(duì)速度-加速度-加加速度在三維空間上進(jìn)行參數(shù)搜索,與GRFT相比,計(jì)算復(fù)雜度更高。文獻(xiàn)[15]提出一種將廣義KT和廣義去調(diào)頻技術(shù)結(jié)合的相參積累算法,但該算法多次使用KT,帶來較大的能量損失,并且仍需對(duì)多普勒模糊數(shù)、加速度和加加速度進(jìn)行參數(shù)搜索。除此之外,廣義傅里葉變換[16]、Radon線性正則變換[17]等也是目前較為流行的典型算法,但以上幾種算法都無法避免參數(shù)搜索,隨著信號(hào)采樣點(diǎn)數(shù)和積累時(shí)間的增加,算法運(yùn)算量陡升,影響目標(biāo)的實(shí)時(shí)檢測(cè)性能。為降低運(yùn)算復(fù)雜度,文獻(xiàn)[18]和文獻(xiàn)[19]提出了一些典型的基于相鄰相關(guān)函數(shù)(ACCF)的快速相干積分算法,如迭代ACCF[18]和相鄰相關(guān)函數(shù)-呂分布算法(ACCF-LVD)[19]。基于ACCF的算法能夠以較低計(jì)算復(fù)雜度實(shí)現(xiàn)RM和DFM的校正,但需要目標(biāo)在相鄰時(shí)間之間的RM處于同一個(gè)距離單元內(nèi)。
本文在以上研究的基礎(chǔ)上,針對(duì)上述算法在處理高速機(jī)動(dòng)目標(biāo)回波信號(hào)時(shí)計(jì)算量過大、受多普勒模糊影響以及低信噪比積累性能不佳等問題,提出了一種基于慢時(shí)間序列反轉(zhuǎn)變換(TRT)-SKT-高階模糊函數(shù)(HAF)的變加速目標(biāo)快速相參積累算法。該算法首先利用TRT對(duì)目標(biāo)速度和加加速度造成的一階和三階RM以及DFM進(jìn)行統(tǒng)一校正,再通過SKT消除加速度引起的二階RM。接著提取目標(biāo)所在距離單元信號(hào),運(yùn)用HAF法從該線性調(diào)頻信號(hào)估計(jì)出目標(biāo)的加速度,用所得加速度構(gòu)建相位補(bǔ)償函數(shù)以校正剩余的DFM,最后對(duì)回波信號(hào)在多普勒域進(jìn)行快速傅里葉變換(FFT)實(shí)現(xiàn)相參積累。本文所提算法無需對(duì)目標(biāo)運(yùn)動(dòng)參數(shù)進(jìn)行搜索,不受多普勒欠采樣的影響,極大地降低了算法運(yùn)算復(fù)雜度,并且在低SNR情況下,仍然有著較好的檢測(cè)性能。
1 回波信號(hào)模型
假設(shè)雷達(dá)發(fā)射線性調(diào)頻(LFM)信號(hào)
(1)
式中:rect(·)表示矩形窗函數(shù);Tp為脈沖信號(hào)寬度;u為發(fā)射信號(hào)的調(diào)頻率;t為單個(gè)脈沖時(shí)間內(nèi)的快時(shí)間變量;fc為載頻。
雷達(dá)發(fā)射的脈沖數(shù)為M,脈沖重復(fù)時(shí)間間隔為Tr,則在整個(gè)脈沖持續(xù)時(shí)間內(nèi),慢時(shí)間變量可以表示為tm=mTr(m=0,1,…,M-1)。針對(duì)變加速目標(biāo),假設(shè)只考慮徑向運(yùn)動(dòng)參數(shù),其初始距離、徑向速度、徑向加速度和徑向加加速度分別表示為R0、c1、c2和c3,目標(biāo)相對(duì)于雷達(dá)在tm時(shí)刻的瞬時(shí)距離可以表示為
(2)
忽略噪聲,雷達(dá)接收的基帶回波信號(hào)可以表示為
(3)
式中:A為回波信號(hào)幅度;c為光速;λ=c/fc為信號(hào)波長(zhǎng)。對(duì)基帶回波信號(hào)進(jìn)行脈沖壓縮,得到脈壓后的回波信號(hào)
(4)
式中:A0為回波信號(hào)經(jīng)過脈壓后的信號(hào)幅度;B為信號(hào)帶寬;sinc(x)=sin(πx)/πx表示為sinc函數(shù)。由式(4)sinc(·)項(xiàng)可知,脈壓回波的包絡(luò)位置隨著慢時(shí)間的變化而改變。
2 算法原理
本文算法原理框圖如圖1所示。該算法首先在距離頻率-方位時(shí)域上利用TRT對(duì)目標(biāo)速度和加加速度造成的RM以及DFM進(jìn)行統(tǒng)一校正;然后采用SKT消除加速度引起的距離彎曲。此時(shí)目標(biāo)的RM得到完全校正,提取目標(biāo)所在距離單元的慢時(shí)間序列,該序列為一個(gè)LFM信號(hào),運(yùn)用HAF法從該LFM信號(hào)估計(jì)出目標(biāo)的加速度,用所得加速度構(gòu)建相位補(bǔ)償函數(shù)以校正加速度帶來的DFM。最后對(duì)回波信號(hào)分別在時(shí)域進(jìn)行逆快速傅里葉變換(IFFT),在多普勒域進(jìn)行FFT實(shí)現(xiàn)相參積累。
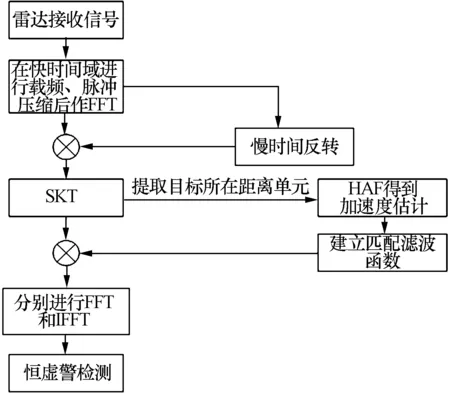
圖1 算法原理框圖
下面分別從單目標(biāo)和多目標(biāo)情況對(duì)基于TRT-SKT-HAF的變加速目標(biāo)快速相參積累算法原理進(jìn)行詳細(xì)闡述。
2.1 單目標(biāo)
對(duì)式(4)沿快時(shí)間維度進(jìn)行FFT,得到距離頻率域的回波信號(hào)
(5)
當(dāng)目標(biāo)速度比較快而雷達(dá)的脈沖重復(fù)頻率比較低時(shí),會(huì)發(fā)生欠采樣現(xiàn)象,此時(shí)目標(biāo)速度可以表示為
c1=va+nvamb
(6)
式中:va=mod(c1,vamb);n為模糊數(shù);vamb為盲速。將式(6)代入式(5)得
(7)
式(7)存在四個(gè)相位項(xiàng),后面三個(gè)相位項(xiàng)均存在慢時(shí)間變量和距離頻率的耦合,下面介紹TRT-SKT-HAF算法分別對(duì)耦合相位項(xiàng)進(jìn)行處理。
將式(7)沿慢時(shí)間反轉(zhuǎn)然后與原式相乘得到
T(tm,f)=S(tm,f)·S(-tm,f)=
(8)
由式(8)知經(jīng)過TRT變換后,目標(biāo)速度及加加速度帶來的RM得到校正,但慢時(shí)間變量和距離頻率的耦合仍存在。對(duì)式(8)作SKT處理,令
(9)
代入式(8)得
(10)
對(duì)式(10)沿距離頻率維作逆傅里葉變換得
(11)
由式(11)可知,當(dāng)完成SKT后,目標(biāo)回波的RM已完全校正,信號(hào)快時(shí)間維峰值均在4R0/c對(duì)應(yīng)的距離單元內(nèi),取峰值所在距離單元的慢時(shí)間信號(hào)得
(12)
此時(shí)信號(hào)是一個(gè)關(guān)于慢時(shí)間變量tn的復(fù)單頻信號(hào),其二階瞬時(shí)矩可以表示為
s2(tn;τ)=s(tn)·s*(tn-τ)=
(13)
式中:τ為常數(shù)時(shí)延。式(13)的二階模糊函數(shù)為

(14)

(15)
將式(15)與式(10)相乘后沿快時(shí)間維作IFFT得
(16)
由式(16)可知,當(dāng)目標(biāo)加速度估計(jì)等于真實(shí)加速度時(shí),加速度所在相位項(xiàng)可以被完全補(bǔ)償。此時(shí)對(duì)信號(hào)沿慢時(shí)間作FFT得到
(17)
由式(17)可知,目標(biāo)能量被積聚在同一個(gè)距離單元和多普勒單元中,且多普勒單元始終位于頻率為0處。
2.2 多目標(biāo)
考慮多目標(biāo)脈壓后的距離頻率域回波信號(hào)

(18)
式中:A1,i為脈壓回波經(jīng)過FFT后目標(biāo)i的振幅。將式(18)沿慢時(shí)間軸反轉(zhuǎn)后與原式相乘得
(19)
式(19)第一項(xiàng)是信號(hào)自項(xiàng),可以用來進(jìn)行相參積累,并且信號(hào)自項(xiàng)處理過程中的FFT和IFFT都是線性過程,最后自項(xiàng)和的輸出也是各個(gè)目標(biāo)積累結(jié)果的疊加。第二項(xiàng)為不同目標(biāo)之間的交叉項(xiàng),Scross(f,tm)的具體表達(dá)式為
(20)
接下來同樣進(jìn)行SKT處理,代入式(9),得到
(21)
其中Scross(f,tn)為

(22)
觀察式(21)和式(22)可知,信號(hào)自項(xiàng)的RM已經(jīng)校正,但是交叉項(xiàng)仍存在RM現(xiàn)象。此時(shí)對(duì)回波信號(hào)進(jìn)行脈沖積累,信號(hào)自項(xiàng)會(huì)聚焦,而交叉項(xiàng)由于存在RM,其能量無法得到聚焦。接下來分別提取出各個(gè)目標(biāo)單元所在的慢時(shí)間序列,利用HAF得到各目標(biāo)的加速度估計(jì)。假設(shè)現(xiàn)得到目標(biāo)i的加速度估計(jì),建立匹配濾波函數(shù)如下
(23)
將匹配濾波函數(shù)與式(21)相乘,此時(shí)目標(biāo)i的DFM得到消除,對(duì)回波信號(hào)在慢時(shí)間維作FFT,目標(biāo)i就能實(shí)現(xiàn)相參積累。
2.3 算法實(shí)現(xiàn)
根據(jù)圖1給出的算法原理框圖,本文所提算法的具體實(shí)現(xiàn)步驟如下:
(1)對(duì)雷達(dá)接收的LFM回波信號(hào)在快時(shí)間域進(jìn)行去載頻和脈沖壓縮處理后做FFT,得到在距離頻域-慢時(shí)間域上的回波信號(hào)為S(tm,f);
(2)S(tm,f)沿慢時(shí)間維度進(jìn)行反轉(zhuǎn)得到S(-tm,f),將其與原式相乘得到T(tm,f),通過TRT處理可以校正目標(biāo)因速度帶來的一階RM、加加速度帶來的三階RM和DFM;
(3)對(duì)T(tm,f)用線性插值的方法在慢時(shí)間軸作SKT處理得到T(tn,f),此時(shí)目標(biāo)RM已經(jīng)完全校正;
(4)提取目標(biāo)所在距離單元的慢時(shí)間序列,利用HAF估計(jì)出目標(biāo)加速度后建立匹配濾波函數(shù)與T(tn,f)相乘消除加速度帶來的DFM;
(5)對(duì)經(jīng)過匹配濾波后的T(tn,f)分別沿距離頻率f進(jìn)行IFFT和慢時(shí)間tn進(jìn)行FFT,實(shí)現(xiàn)目標(biāo)能量的相參積累;
(6)提取步驟(5)中積累幅度最大值,通過設(shè)計(jì)的恒虛警檢測(cè)器來判斷有無目標(biāo)。
3 仿真實(shí)驗(yàn)分析
3.1 單目標(biāo)仿真
假設(shè)一個(gè)機(jī)動(dòng)目標(biāo),與雷達(dá)之間的初始距離為200 m,初始速度為400 m/s,初始加速度為20 m/s2,初始加加速度為25 m/s3,雷達(dá)系統(tǒng)參數(shù)如表1所示,脈壓后的信噪比為-5 dB,仿真結(jié)果如圖2所示。對(duì)回波信號(hào)進(jìn)行距離向脈沖壓縮后得到脈壓結(jié)果如圖2a)所示,觀察結(jié)果圖發(fā)現(xiàn)目標(biāo)軌跡有明顯的高階RM。圖2b)為直接對(duì)回波信號(hào)進(jìn)行動(dòng)目標(biāo)檢測(cè)(MTD)的積累結(jié)果,可以看到目標(biāo)能量分散在距離單元和多普勒單元上,無法得到積累。圖2c)是經(jīng)過TRT的結(jié)果,經(jīng)過TRT處理后加加速度帶來的高階RM和速度帶來的線性RM都得到了有效的校正,剩下加速度帶來的二階RM未校正。圖2d)是經(jīng)過SKT處理后的結(jié)果,可以發(fā)現(xiàn)目標(biāo)RM已得到完全校正,目標(biāo)被拉回到同一距離單元內(nèi)。隨后提取目標(biāo)所在距離單元,對(duì)其進(jìn)行HAF處理得到加速度估計(jì)如圖2e)所示。最后對(duì)回波信號(hào)進(jìn)行加速度匹配濾波后在多普勒域做FFT得到相參積累結(jié)果如圖2f)所示。從圖2a)~圖2f)的仿真結(jié)果可知,本文所提方法有效地對(duì)單個(gè)變加速目標(biāo)實(shí)現(xiàn)了長(zhǎng)時(shí)間相參積累。

表1 雷達(dá)系統(tǒng)仿真參數(shù)
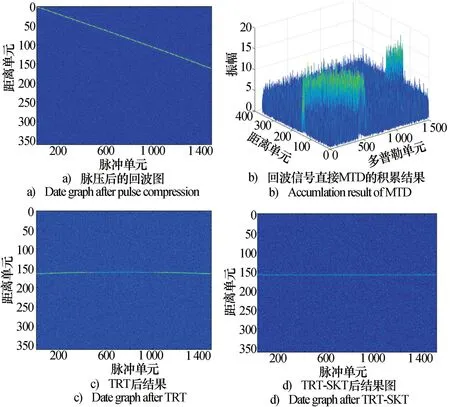
圖2 單個(gè)目標(biāo)仿真結(jié)果
為比較所提算法在低信噪比下與其他算法的積累性能,圖2g)~圖2j)分別給出了TRT-SKT-HAF、GRFT、迭代ACCF以及RFRAF算法在脈壓后SNR為-10 dB下的仿真結(jié)果。由圖2g)可知,TRT-SKT-HAF算法在低信噪比下仍很好地實(shí)現(xiàn)了目標(biāo)能量的積累。圖2h)是GRFT算法的積累結(jié)果,雖然GRFT也能實(shí)現(xiàn)目標(biāo)回波信號(hào)的相參積累,但在高峰值附近出現(xiàn)了很多BSSL,容易造成虛警。圖2i)是迭代ACCF算法的積累結(jié)果,觀察發(fā)現(xiàn)目標(biāo)峰值發(fā)生了分散,該算法在低SNR下的積累效果欠佳。圖2j)是RFRAF算法的積累結(jié)果,RFRAF雖實(shí)現(xiàn)了目標(biāo)能量的積累,但存在一些BSSL現(xiàn)象。由圖2g)~圖2j)可知,本文所提算法在低SNR下對(duì)單個(gè)變加速目標(biāo)的積累性能優(yōu)于其他算法。
3.2 多目標(biāo)仿真
假設(shè)兩個(gè)運(yùn)動(dòng)目標(biāo),雷達(dá)系統(tǒng)參數(shù)如表1所示,設(shè)定脈壓后的信噪比為-5 dB,目標(biāo)運(yùn)動(dòng)參數(shù)如表2所示,多個(gè)目標(biāo)仿真結(jié)果如圖3所示。
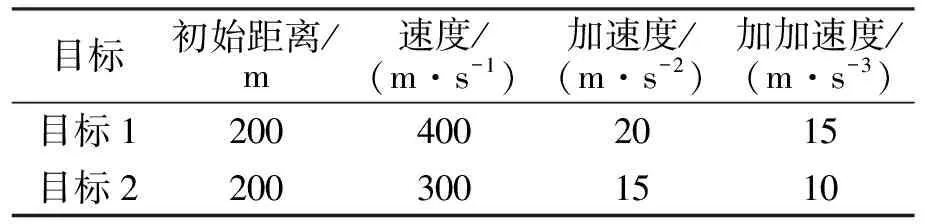
表2 多目標(biāo)運(yùn)動(dòng)參數(shù)
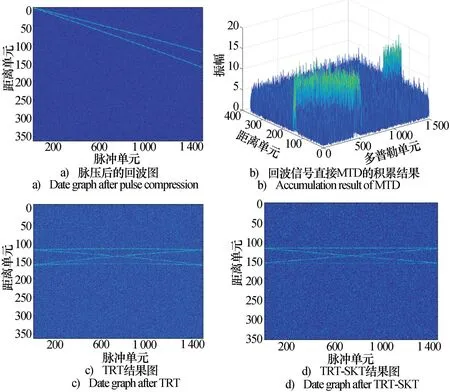
圖3 多個(gè)目標(biāo)仿真結(jié)果
對(duì)回波信號(hào)進(jìn)行距離向脈沖壓縮后得到脈壓結(jié)果如圖3a)所示,觀察結(jié)果圖發(fā)現(xiàn)兩個(gè)目標(biāo)軌跡都出現(xiàn)了高階RM。圖3b)為直接對(duì)回波進(jìn)行MTD的積累結(jié)果,可以看到目標(biāo)能量分散在距離單元和多普勒單元上,能量無法得到積累并且無法區(qū)分兩個(gè)目標(biāo)。圖3c)是經(jīng)過TRT處理的結(jié)果,兩個(gè)目標(biāo)經(jīng)過TRT處理后RM得到了一定的校正,剩下各自加速度帶來的二階RM未校正。圖3d)是經(jīng)過SKT處理后的結(jié)果,可以發(fā)現(xiàn)兩個(gè)目標(biāo)RM已得到完全校正。隨后提取各自目標(biāo)所在距離單元,對(duì)其進(jìn)行HAF處理得到各自加速度估計(jì)如圖3e)、圖3f)所示。最后對(duì)回波信號(hào)分別進(jìn)行加速度匹配濾波后得到相參積累結(jié)果如圖3g)、圖3h)所示,目標(biāo)1、2都得到了有效的積累,且不受交叉項(xiàng)的影響。從圖3a)~圖3h)的仿真結(jié)果可知,本文所提方法有效地對(duì)多個(gè)變加速目標(biāo)實(shí)現(xiàn)了長(zhǎng)時(shí)間相參積累,并得到了各目標(biāo)的加速度信息。
圖3i)~圖3l)是多目標(biāo)情況下其他算法的積累結(jié)果。圖3i)是GRFT的積累結(jié)果,觀察可知GRFT算法在多目標(biāo)情況下仍存在著嚴(yán)重的BSSL現(xiàn)象。圖3j)是迭代ACCF算法的積累結(jié)果,由圖可知,個(gè)別目標(biāo)峰值幅度較低,積累效果不佳。圖3k)和圖3l)是RFRAF的積累結(jié)果,和單目標(biāo)情況相似,同樣存在一些BSSL。結(jié)合圖3g)~圖3l)可知,本文算法在多目標(biāo)情況下的積累性能同樣優(yōu)于其他算法。
3.3 運(yùn)算復(fù)雜度分析

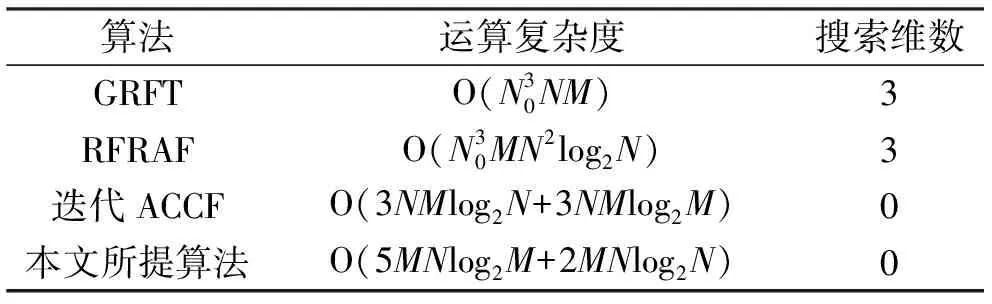
表3 不同算法運(yùn)算復(fù)雜度比較
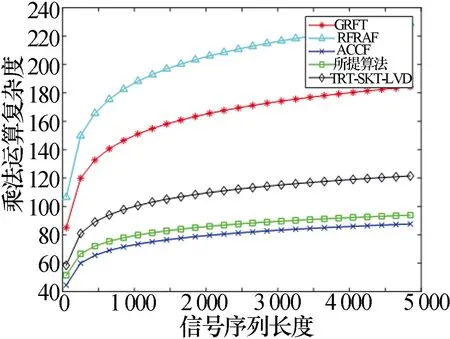
圖4 不同算法運(yùn)算復(fù)雜度比較圖
假設(shè)M=N=N0,那么TRT-SKT-HAF、GRFT、RFRAF和迭代ACCF四種算法的運(yùn)算復(fù)雜度分別如下:O(M2log2M)、O(M5)、O(M6log2M)和O(M2log2M),可知本文所提算法的運(yùn)算復(fù)雜度相比GRFT減小了3個(gè)數(shù)量級(jí),相比RFRAF減小了4個(gè)數(shù)量級(jí),與迭代ACCF算法復(fù)雜度相當(dāng)。
3.4 檢測(cè)性能仿真
假設(shè)實(shí)驗(yàn)的恒虛警率設(shè)置為10-4,雷達(dá)系統(tǒng)仿真參數(shù)如表1所示,目標(biāo)的運(yùn)動(dòng)參數(shù)與3.1節(jié)單目標(biāo)仿真運(yùn)動(dòng)參數(shù)設(shè)置一致。輸入SNR區(qū)間為[-25,20] dB,分別對(duì)每一種算法在其SNR區(qū)間上進(jìn)行500次蒙特卡洛實(shí)驗(yàn),得到的仿真結(jié)果如圖5所示。由圖5可知,本文所提算法的檢測(cè)性優(yōu)于PHAF算法、RFT算法、RFRFT算法和RFRAF算法,這是因?yàn)楸疚乃惴ㄓ行У匦U四繕?biāo)的高階RM和DFM。本文所提算法雖然在檢測(cè)SNR門限上比GRFT算法高3 dB,但有更低的運(yùn)算復(fù)雜度且不需要對(duì)目標(biāo)運(yùn)動(dòng)參數(shù)進(jìn)行搜索,仿真結(jié)果表明所提算法達(dá)到了算法復(fù)雜度和檢測(cè)性能的平衡。
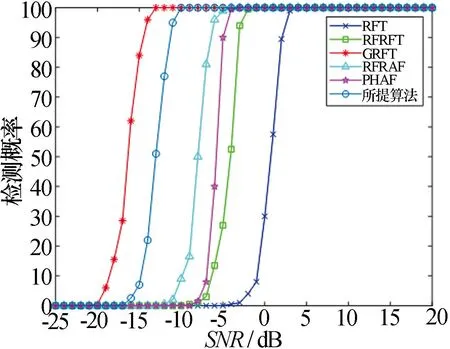
圖5 不同算法的檢測(cè)性能度比較結(jié)果圖
4 結(jié)束語
高速機(jī)動(dòng)目標(biāo)的回波信號(hào)在相參積累時(shí)間內(nèi)會(huì)發(fā)生嚴(yán)重的RM和DFM現(xiàn)象,制約著雷達(dá)對(duì)運(yùn)動(dòng)目標(biāo)的檢測(cè)性能。針對(duì)傳統(tǒng)算法在處理這類目標(biāo)回波信號(hào)時(shí)計(jì)算量過大、受多普勒模糊影響以及低SNR積累性能不佳等問題,本文提出了一種基于TRT-SKT-HAF的變加速目標(biāo)快速相參積累算法,該算法具有以下優(yōu)點(diǎn):(1)無需考慮多普勒模糊帶來的影響;(2)無需對(duì)目標(biāo)速度、加速度以及加加速度進(jìn)行任何參數(shù)搜索操作,同時(shí)可以有效校正RM和DFM,計(jì)算復(fù)雜度較低,便于工程實(shí)現(xiàn);(3)能夠獲取目標(biāo)的加速度信息,并利用加速度估計(jì)實(shí)現(xiàn)相參積累;(4)對(duì)多目標(biāo)產(chǎn)生的交叉項(xiàng)能夠有效抑制,可實(shí)現(xiàn)多個(gè)目標(biāo)的相參積累。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06