基于總線同步的多驅(qū)動(dòng)系統(tǒng)漏電流分析與抑制*
2024-04-12 00:29:46李葉松湯前進(jìn)柯萬(wàn)宇
組合機(jī)床與自動(dòng)化加工技術(shù) 2024年3期
雷 力,李葉松,湯前進(jìn),柯萬(wàn)宇
(1.華中科技大學(xué)人工智能與自動(dòng)化學(xué)院,武漢 430074;2.武漢職業(yè)技術(shù)學(xué)院機(jī)電工程學(xué)院,武漢 430074;3.武漢華中數(shù)控股份有限公司,武漢 430074)
0 引言
數(shù)控加工裝備由數(shù)控系統(tǒng)、伺服驅(qū)動(dòng)系統(tǒng)、機(jī)械主體以及其他輔助裝置所構(gòu)成。數(shù)控加工裝備是典型的多驅(qū)動(dòng)系統(tǒng),需要控制多個(gè)伺服電機(jī)聯(lián)動(dòng)來(lái)完成復(fù)雜工件的加工任務(wù)。目前,高性能的數(shù)控加工裝備主要采用工業(yè)以太網(wǎng)總線的通訊方式,實(shí)現(xiàn)數(shù)控系統(tǒng)和驅(qū)動(dòng)系統(tǒng)之間的數(shù)據(jù)高速交換,能夠滿足多軸同步及控制的高實(shí)時(shí)性要求。
伺服驅(qū)動(dòng)系統(tǒng)由交流伺服驅(qū)動(dòng)器和交流伺服電機(jī)構(gòu)成,是數(shù)控加工裝備的核心執(zhí)行單元。交流伺服電機(jī)作為感性負(fù)載,其內(nèi)部存在對(duì)地的分布電容。伺服驅(qū)動(dòng)器內(nèi)部功率器件高頻的開(kāi)通和關(guān)斷,會(huì)對(duì)分布電容進(jìn)行頻繁充放電,其動(dòng)作電流是產(chǎn)生漏電流的主要原因[1-2]。多驅(qū)動(dòng)系統(tǒng)中漏電流的數(shù)值相比單驅(qū)動(dòng)系統(tǒng)會(huì)成倍數(shù)疊加,在數(shù)值超過(guò)漏電保護(hù)裝置的閾值后將會(huì)觸發(fā)三相電源的漏電保護(hù),導(dǎo)致系統(tǒng)的供電被切斷,影響設(shè)備的正常運(yùn)行。此外,漏電流產(chǎn)生的傳導(dǎo)共模電磁干擾(EMI)也會(huì)流入電網(wǎng)中污染電能質(zhì)量,影響其它的用電終端[3]。因此,減少多驅(qū)動(dòng)系統(tǒng)運(yùn)行中的漏電流具有重要的工程應(yīng)用價(jià)值。
目前,主要的做法是對(duì)單驅(qū)動(dòng)系統(tǒng)通過(guò)改進(jìn)硬件的拓?fù)浣Y(jié)構(gòu)來(lái)減小漏電流,例如增加濾波器等方式,但硬件方案存在成本過(guò)高的問(wèn)題,因此有學(xué)者提出針對(duì)PWM的調(diào)制策略進(jìn)行改進(jìn)來(lái)解決漏電流問(wèn)題[4-6]。
邱繼浪等[7]基于傳統(tǒng)的調(diào)制策略將控制扇區(qū)進(jìn)行重新劃分,針對(duì)降低共模電壓設(shè)計(jì)出一種新的調(diào)制策略。但復(fù)雜的調(diào)制策略一方面帶來(lái)的是計(jì)算資源上升的需求,另一方面也造成諧波含量增加,影響電網(wǎng)的電能質(zhì)量。胡慧慧等[8]提出一種改進(jìn)型3D-SVPWM的控制方式,將參考電壓鄰近的兩個(gè)非零矢量代替零矢量,改進(jìn)了零矢量的缺點(diǎn)。但在抑制共模電壓時(shí)提高了諧波的畸變率,存在EMI干擾問(wèn)題。姜艷姝等[9]提出一種濾波器與調(diào)制策略相結(jié)合的抑制方法,理論上可實(shí)現(xiàn)零共模電壓,但控制過(guò)程相對(duì)復(fù)雜。
本文針對(duì)目前抑制方法存在諧波畸變率高、EMI干擾明顯以及改進(jìn)調(diào)制策略兼容性差的缺點(diǎn),提出一種新的鄰消抑制措施。利用共模電壓抵消原理,無(wú)需增加硬件成本,僅需通過(guò)相鄰驅(qū)動(dòng)器輸出相位反相的PWM調(diào)制信號(hào),即可實(shí)現(xiàn)多驅(qū)動(dòng)系統(tǒng)應(yīng)用時(shí)的漏電流抑制。通過(guò)實(shí)驗(yàn)平臺(tái)和數(shù)控機(jī)床的測(cè)試驗(yàn)證了所提措施的有效性。
1 單驅(qū)動(dòng)系統(tǒng)漏電流分析及測(cè)試
1.1 單驅(qū)動(dòng)系統(tǒng)漏電流產(chǎn)生原因分析
電機(jī)驅(qū)動(dòng)系統(tǒng)中多處存在對(duì)地分布電容,主要包括電機(jī)繞組與接地外殼之間的分布電容、驅(qū)動(dòng)器與電機(jī)之間的輸電線纜和大地之間的分布電容以及驅(qū)動(dòng)器與接地外殼之間的分布電容等。
在PWM電機(jī)驅(qū)動(dòng)系統(tǒng)的回路中存在多條正常漏電流的流通路徑,其流向電網(wǎng)側(cè)漏電保護(hù)裝置主要有兩條路徑。一條為由電機(jī)繞組對(duì)地的分布電容Cng構(gòu)成,另一條為由驅(qū)動(dòng)電纜與大地之間的分布電容Cg構(gòu)成[11]。分布電容的具體位置如圖1所示,漏電流ing和漏電流ig構(gòu)成了驅(qū)動(dòng)系統(tǒng)中電機(jī)側(cè)正常漏電流的主要部分。
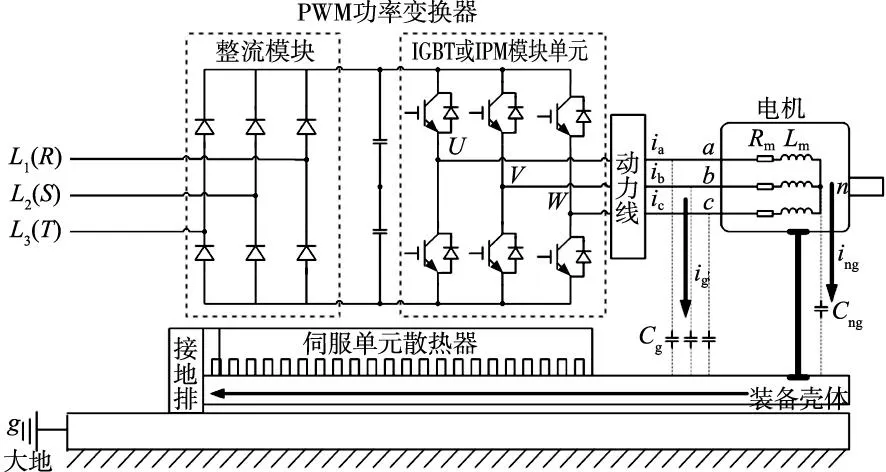
圖1 單驅(qū)動(dòng)系統(tǒng)示意圖
不考慮三相動(dòng)力電纜的壓降,假定電機(jī)三相輸入端電壓與功率逆變器輸出端電壓Vag、Vbg、Vcg相等,則有如下表達(dá)式:
(1)
式中:Vng為電機(jī)三相繞組中性點(diǎn)n與大地間的電壓,ia、ib、ic分別為伺服電機(jī)三相繞組的電流,Lm為電機(jī)繞組電感值,Rm為電機(jī)繞組電阻值。
將式(1)中的3個(gè)方程聯(lián)立相加,可以得到式(2)。
(2)
在三相負(fù)載相互平衡時(shí),ia、ib、ic三相繞組電流的矢量和為0,可以進(jìn)一步得出式(3)。
(3)
可以利用電容的電壓電流公式計(jì)算單驅(qū)動(dòng)系統(tǒng)中分布電容Cng通路對(duì)地端的正常漏電流ICM,如式(4)所示。
(4)
式中:VCM為該漏電流通路的共模電壓。
由式(4)中可以看出,單驅(qū)動(dòng)系統(tǒng)中正常漏電流受到分布電容大小和共模電壓的變化頻率影響。特別是當(dāng)驅(qū)動(dòng)系統(tǒng)逆變器功率器件工作在高頻開(kāi)關(guān)狀態(tài)時(shí),共模電壓會(huì)頻繁對(duì)分布電容進(jìn)行充、放電的動(dòng)作,導(dǎo)致伺服電機(jī)側(cè)的共模漏電流大幅產(chǎn)生。通常針對(duì)單驅(qū)動(dòng)系統(tǒng)的漏電流抑制,可以從減小分布電容和降低工作頻率的角度出發(fā),或者加裝濾波吸收裝置,但會(huì)帶來(lái)成本上升。
1.2 單驅(qū)動(dòng)系統(tǒng)漏電流實(shí)驗(yàn)測(cè)試
為更好地對(duì)漏電流的產(chǎn)生原因進(jìn)行分析,通過(guò)搭建相應(yīng)的實(shí)驗(yàn)平臺(tái)對(duì)單驅(qū)動(dòng)系統(tǒng)漏電流的不同影響因素進(jìn)行驗(yàn)證。實(shí)驗(yàn)平臺(tái)由表1所列的實(shí)驗(yàn)設(shè)備進(jìn)行搭建。
表1 實(shí)驗(yàn)平臺(tái)設(shè)備型號(hào)
圖2為單驅(qū)動(dòng)系統(tǒng)漏電流實(shí)驗(yàn)平臺(tái)的電氣原理圖。該電機(jī)采用星型接法,將三相繞組的中性點(diǎn)引出接示波器電壓探頭的正極,探頭負(fù)極接電機(jī)的外機(jī)殼地,通過(guò)該方式來(lái)測(cè)量電機(jī)電感的共模電壓數(shù)值。另一處電機(jī)外殼通過(guò)接地線接入大地,漏電流互感器對(duì)漏電流的數(shù)值進(jìn)行測(cè)量。
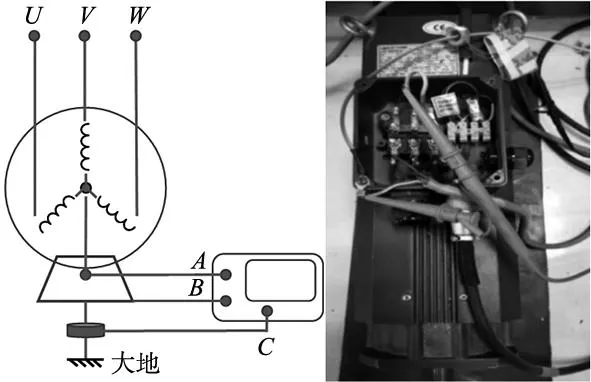
圖2 單驅(qū)動(dòng)系統(tǒng)漏電流實(shí)驗(yàn)平臺(tái)
伺服驅(qū)動(dòng)器在不使能(逆變器不工作)的情況下,380 V的三相交流電通過(guò)電機(jī)中的分布電容與大地形成回路。圖3為測(cè)試顯示的電壓及電流波形,其中,1號(hào)波形為100 V的共模電壓波形,2號(hào)波形是一個(gè)頻率為150 Hz、幅值為10 mA和三相工頻相關(guān)的微弱漏電流波形。這種漏電流是由三相交流電通過(guò)電源模塊、驅(qū)動(dòng)單元和電機(jī),在流經(jīng)機(jī)殼和分布電容后產(chǎn)生的,并且通過(guò)接地線流入大地。
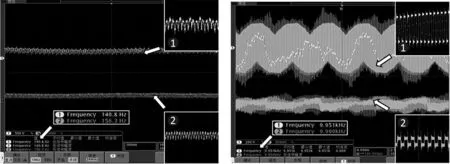
圖3 共模電壓及漏電流波形圖(未使能)
當(dāng)使能伺服驅(qū)動(dòng)器運(yùn)行電機(jī)(逆變器開(kāi)關(guān)工作,開(kāi)關(guān)頻率為10 kHz),將會(huì)在150 Hz的正弦電壓上疊加高頻斬波電壓,電機(jī)的繞組中心點(diǎn)對(duì)大地的共模電壓也會(huì)上升,進(jìn)而產(chǎn)生更多的漏電流。圖4為驅(qū)動(dòng)器使能情況下測(cè)量的共模電壓及漏電流波形,其中1號(hào)波形頻率為9.95 kHz,幅值為200左右的共模電壓,2號(hào)波形的頻率為9.99 kHz,漏電流數(shù)值為200 mA左右。可以看出,伺服驅(qū)動(dòng)器正常工作后,功率器件的頻繁開(kāi)關(guān)是共模電壓及漏電流變化的主要原因。
2 多驅(qū)動(dòng)系統(tǒng)漏電流分析及抑制
2.1 多驅(qū)動(dòng)系統(tǒng)的漏電流產(chǎn)生原因
多驅(qū)動(dòng)系統(tǒng)相比單驅(qū)動(dòng)系統(tǒng)擁有兩個(gè)以上的伺服驅(qū)動(dòng)器以及相對(duì)應(yīng)的驅(qū)動(dòng)電機(jī)。單驅(qū)動(dòng)系統(tǒng)所產(chǎn)生的漏電流往往不足以觸發(fā)漏電保護(hù)裝置動(dòng)作。而多驅(qū)動(dòng)系統(tǒng)在沒(méi)有添加任何漏電流吸收裝置的前提下,其漏電流數(shù)值等同于多個(gè)單驅(qū)動(dòng)系統(tǒng)的漏電流直接疊加。疊加后的漏電流數(shù)值將會(huì)明顯上升,會(huì)導(dǎo)致漏電保護(hù)裝置觸發(fā),影響多驅(qū)動(dòng)系統(tǒng)加工裝備的正常運(yùn)行。
以典型的數(shù)控加工中心機(jī)床為例,包括主軸和3個(gè)伺服進(jìn)給軸,驅(qū)動(dòng)軸的數(shù)量通常為4個(gè)。漏電流將會(huì)依據(jù)驅(qū)動(dòng)軸的數(shù)量相互疊加。
疊加式漏電流ICM_sum如式(8)所示。
ICM_sum=ICM1+ICM2+ICM3+ICM4
(5)
式中:ICM1、ICM2、ICM3和ICM4分別為相對(duì)應(yīng)不同驅(qū)動(dòng)軸的漏電流。疊加式漏電流在相位相同的情況下會(huì)產(chǎn)生相對(duì)最大的結(jié)果,是多驅(qū)動(dòng)系統(tǒng)漏電保護(hù)觸發(fā)的主要原因,其會(huì)導(dǎo)致數(shù)控機(jī)床不能夠長(zhǎng)時(shí)間穩(wěn)定運(yùn)行,同時(shí)也帶來(lái)了一定的安全隱患。
2.2 多驅(qū)動(dòng)系統(tǒng)的漏電流抑制原理
從式(5)可以看出,多驅(qū)動(dòng)系統(tǒng)漏電流在各軸具有相同相位時(shí)形成正相疊加達(dá)到最大,如果能夠在保持各軸PWM開(kāi)關(guān)頻率相同的情況下控制漏電流相位,采用將相鄰驅(qū)動(dòng)系統(tǒng)共模電壓的矢量方向反相進(jìn)而抵消共模電壓的方式就可以降低多驅(qū)動(dòng)系統(tǒng)的總共模電壓,達(dá)到降低多驅(qū)動(dòng)系統(tǒng)漏電流的目的,即漏電流鄰消抑制措施。
未施加漏電流鄰消抑制措施的多驅(qū)動(dòng)系統(tǒng)總共模電壓VCM_sum由不同驅(qū)動(dòng)軸的共模電壓相加構(gòu)成,VCM_sum由式(6)所示。
VCM_sum=VCM1+VCM2+VCM3+VCM4
(6)
式中:VCM1、VCM2、VCM3和VCM4分別為相對(duì)應(yīng)伺服軸所在單驅(qū)動(dòng)系統(tǒng)的共模電壓。
在多驅(qū)動(dòng)系統(tǒng)中施加漏電流鄰消抑制措施,將相鄰驅(qū)動(dòng)軸的共模電壓相互抵消,總共模電壓VCM_sum經(jīng)過(guò)矢量疊加后,如式(7)所示。
VCM_sum=(VCM1+(-VCM2))+(VCM3+(-VCM4))
(7)
從式(6)和式(7)的對(duì)比可以看出,施加漏電流鄰消抑制措施后會(huì)將相鄰共模電壓相互抵消,總共模電壓會(huì)有明顯的下降,進(jìn)而匯聚到地線的總漏電流隨之也會(huì)有明顯的減少。
2.3 基于雙驅(qū)動(dòng)系統(tǒng)總漏電流的鄰消抑制措施
本文中以雙驅(qū)動(dòng)系統(tǒng)為例,來(lái)分析多驅(qū)動(dòng)系統(tǒng)漏電流的抑制實(shí)現(xiàn)方案。實(shí)驗(yàn)中只要能夠降低雙驅(qū)動(dòng)系統(tǒng)的漏電數(shù)值,便可以證明該漏電流鄰消抑制措施對(duì)多驅(qū)動(dòng)系統(tǒng)同樣有效。
采用工業(yè)以太網(wǎng)總線通訊的伺服驅(qū)動(dòng)器,其運(yùn)行的時(shí)鐘以太網(wǎng)通訊時(shí)鐘Tm和逆變器PWM工作時(shí)鐘Ts,二者通常是整數(shù)倍關(guān)系,工業(yè)以太網(wǎng)總線的分布式時(shí)鐘功能可以保證多驅(qū)動(dòng)系統(tǒng)各進(jìn)給軸的通訊時(shí)鐘Tm是同步的,各個(gè)伺服驅(qū)動(dòng)系統(tǒng)再根據(jù)通訊時(shí)鐘Tm產(chǎn)生的網(wǎng)絡(luò)中斷同步信號(hào)動(dòng)態(tài)地調(diào)整逆變器PWM的開(kāi)關(guān)周期,避免偏差的累計(jì),從而保證不同驅(qū)動(dòng)單元逆變器的開(kāi)關(guān)周期與總線通訊的周期同步。
進(jìn)一步的,以圖5雙軸驅(qū)動(dòng)單元為例,空間上相鄰的兩個(gè)驅(qū)動(dòng)單元在開(kāi)關(guān)周期同步的基礎(chǔ)上,將1號(hào)驅(qū)動(dòng)單元與2號(hào)驅(qū)動(dòng)單元的PWM載波波形相位差調(diào)整為180°,產(chǎn)生的驅(qū)動(dòng)波形如圖6所示。
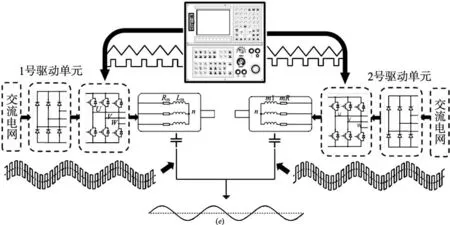
圖5 雙驅(qū)動(dòng)系統(tǒng)漏電流抑制示意圖
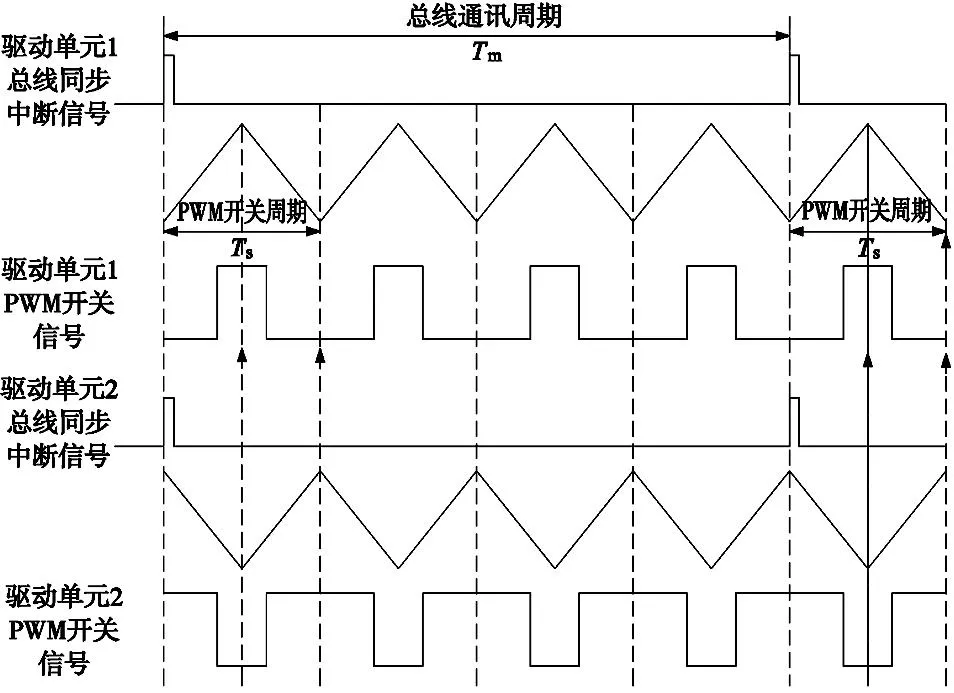
圖6 雙軸驅(qū)動(dòng)系統(tǒng)PWM波形互補(bǔ)輸出
相鄰驅(qū)動(dòng)系統(tǒng)的驅(qū)動(dòng)波形相位差為180°時(shí),兩者所產(chǎn)生共模電壓的矢量方向相反。同時(shí)驅(qū)動(dòng)系統(tǒng)采用SVPWM調(diào)制技術(shù)時(shí),使用相位差180°的載波信號(hào)不會(huì)影響有效電壓矢量的伏秒合成結(jié)果,只會(huì)影響PWM開(kāi)關(guān)序列的順序,因此使得相鄰驅(qū)動(dòng)系統(tǒng)的工作狀態(tài)完全相同,而共模電壓的數(shù)值相同,符號(hào)相反,實(shí)現(xiàn)疊加式共模電壓在理論上的相互抵消,系統(tǒng)的漏電流也將大幅度下降。同理將該漏電流抑制措施應(yīng)用到多驅(qū)動(dòng)系統(tǒng)中,使得空間上相鄰的單驅(qū)動(dòng)系統(tǒng)的共模電壓相互抵消,從而有效降低多驅(qū)動(dòng)系統(tǒng)的總漏電流數(shù)值。
3 多驅(qū)動(dòng)系統(tǒng)漏電流抑制措施有效性驗(yàn)證
3.1 實(shí)驗(yàn)平臺(tái)搭建
為驗(yàn)證該漏電流鄰消抑制措施的有效性,本文通過(guò)模擬數(shù)控加工中心機(jī)床的多驅(qū)動(dòng)系統(tǒng)來(lái)搭建相關(guān)的實(shí)驗(yàn)測(cè)試平臺(tái),測(cè)試平臺(tái)的具體框架如圖7所示。
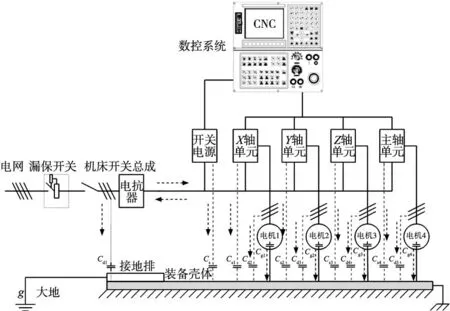
圖7 多驅(qū)動(dòng)系統(tǒng)測(cè)試平臺(tái)示意圖
如圖7所示,數(shù)控加工中心的多驅(qū)動(dòng)系統(tǒng)由4個(gè)交流伺服單元所組成,分別為X軸、Y軸、Z軸以及S主軸所構(gòu)成。X、Y、Z軸伺服驅(qū)動(dòng)系統(tǒng)實(shí)現(xiàn)數(shù)控機(jī)床各坐標(biāo)軸的直線進(jìn)給運(yùn)動(dòng);S軸主軸伺服驅(qū)動(dòng)系統(tǒng)實(shí)現(xiàn)主軸的旋轉(zhuǎn)運(yùn)動(dòng)。
圖8為實(shí)驗(yàn)測(cè)試平臺(tái)的實(shí)物圖,1號(hào)框中為數(shù)控加工控制系統(tǒng);2號(hào)框中為示波器,對(duì)該驅(qū)動(dòng)系統(tǒng)的總共模電壓以及總漏電流進(jìn)行實(shí)時(shí)測(cè)量;3號(hào)框中分別為不同模塊的制動(dòng)電阻,用于吸收電機(jī)制動(dòng)過(guò)程中所產(chǎn)生的多余能量;4號(hào)框中為該多驅(qū)動(dòng)系統(tǒng)不同驅(qū)動(dòng)軸的交流伺服驅(qū)動(dòng)器,其中X、Y軸的交流伺服驅(qū)動(dòng)單元對(duì)3.6 kW的伺服電機(jī)進(jìn)行驅(qū)動(dòng)、Z軸的交流伺服驅(qū)動(dòng)單元對(duì)4.7 kW的伺服電機(jī)進(jìn)行驅(qū)動(dòng)、S軸的交流伺服驅(qū)動(dòng)單元對(duì)7.5 kW的主伺服電機(jī)進(jìn)行驅(qū)動(dòng)。
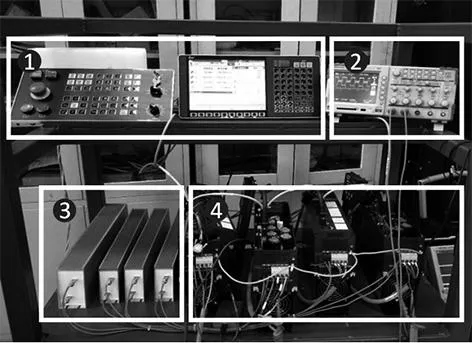
圖8 多驅(qū)動(dòng)系統(tǒng)測(cè)試平臺(tái)實(shí)物
3.2 測(cè)試結(jié)果分析
數(shù)控機(jī)床的多驅(qū)動(dòng)系統(tǒng)實(shí)驗(yàn)平臺(tái)中總漏電流的波形如圖9所示。
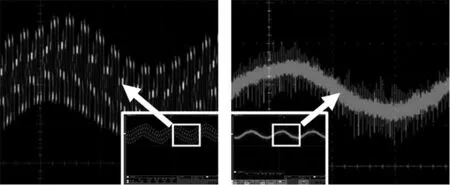
(a) 鄰消抑制措施加前 (b) 鄰消抑制措施加后
圖9a在沒(méi)有施加鄰消抑制措施時(shí),多驅(qū)動(dòng)系統(tǒng)中不同驅(qū)動(dòng)單元的共模電壓之間的相位差值為零,所以其共模電壓的矢量方向相同,多驅(qū)動(dòng)單元相互疊加后總共模電壓數(shù)值較大,其所產(chǎn)生的總漏電流也較大,存在觸發(fā)漏電保護(hù)開(kāi)關(guān)的問(wèn)題。圖9b在施加鄰消抑制措施后,相鄰驅(qū)動(dòng)單元的共模電壓之間矢量方向相反,共模電壓的高頻分量相互抵消,其所產(chǎn)生的總漏電流高頻分量也相互抵消,圖9b中大部分的漏電流頻率為150 Hz,相應(yīng)的數(shù)值也大大減少。
為了進(jìn)一步測(cè)試鄰消抑制措施的實(shí)用效果,本文通過(guò)改變伺服驅(qū)動(dòng)器的PWM開(kāi)關(guān)頻率來(lái)驗(yàn)證鄰消抑制措施對(duì)于不同工作頻率的多驅(qū)動(dòng)系統(tǒng)的普適性。
圖10a的開(kāi)關(guān)頻率為8 kHz,圖10b的開(kāi)關(guān)頻率為16 kHz。從圖10中的數(shù)據(jù)可以看出施加鄰消抑制措施相比未施加鄰消抑制措施的驅(qū)動(dòng)系統(tǒng)其漏電流的數(shù)值有明顯的下降,降低幅度達(dá)到70%~80%。另一方面,圖10a與圖10b在不同的開(kāi)關(guān)頻率狀態(tài)下,其漏電流的數(shù)值均得到有效的降低。根據(jù)以上數(shù)據(jù)的分析結(jié)果,可以證明鄰消抑制措施在不同開(kāi)關(guān)頻率的工作條件下對(duì)降低漏電流數(shù)值的普適性。
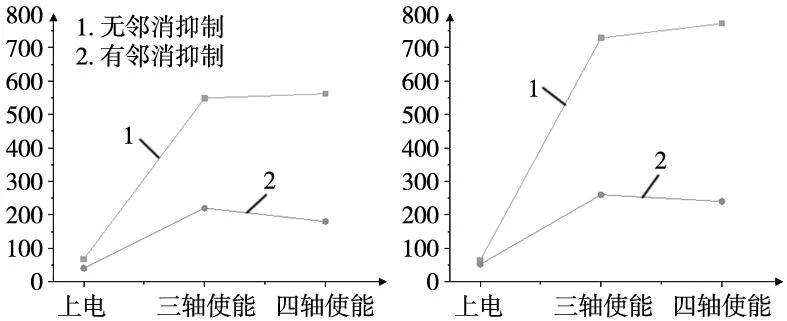
(a) 8 kHz開(kāi)關(guān)頻率 (b) 16 kHz開(kāi)關(guān)頻率
本文進(jìn)一步對(duì)多驅(qū)動(dòng)系統(tǒng)平臺(tái)分別運(yùn)行奇數(shù)驅(qū)動(dòng)單元和偶數(shù)驅(qū)動(dòng)單元時(shí)的漏電流特性進(jìn)行測(cè)試。
圖11為奇數(shù)和偶數(shù)驅(qū)動(dòng)單元切換的實(shí)際測(cè)試波形。可以看出,多驅(qū)動(dòng)系統(tǒng)在從偶數(shù)驅(qū)動(dòng)單元切換到奇數(shù)驅(qū)動(dòng)單元時(shí),出現(xiàn)疊加在150 Hz上的高頻PWM開(kāi)關(guān)波形。使用偶數(shù)驅(qū)動(dòng)單元時(shí)可實(shí)現(xiàn)多驅(qū)動(dòng)系統(tǒng)的整體漏電流抑制,此時(shí)漏電流的數(shù)值最低。而使用奇數(shù)驅(qū)動(dòng)單元時(shí)會(huì)遺留一個(gè)單驅(qū)動(dòng)系統(tǒng)的漏電流無(wú)法抵消,但不足以觸發(fā)漏電保護(hù)裝置。根據(jù)以上的分析結(jié)果,鄰消抑制措施在奇數(shù)和偶數(shù)驅(qū)動(dòng)系統(tǒng)中,依舊可以有效地實(shí)現(xiàn)對(duì)漏電流的抑制,證明在不同數(shù)量的多驅(qū)動(dòng)系統(tǒng)中具有普適性。
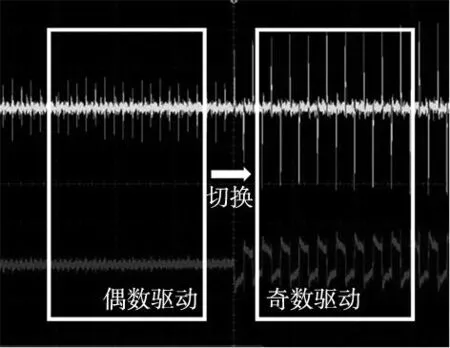
圖11 漏電流對(duì)比圖(奇偶個(gè)數(shù)驅(qū)動(dòng)切換)
以上所有實(shí)驗(yàn)的對(duì)比測(cè)試,從鄰消抑制措施的有效性和普適性?xún)蓚€(gè)方面出發(fā),顯示出該措施在對(duì)漏電流抑制上的實(shí)際應(yīng)用效果。測(cè)試結(jié)果中,在對(duì)工業(yè)以太網(wǎng)總線的多驅(qū)動(dòng)系統(tǒng)施加鄰消抑制措施后,系統(tǒng)的總漏電流最大可有效減少近80%。并且鄰消抑制措施中總共模電壓的相互抵消,在大幅降低高頻漏電流數(shù)值的同時(shí),多驅(qū)動(dòng)系統(tǒng)的EMI也能夠得到很好的治理。同時(shí)在長(zhǎng)時(shí)間的運(yùn)行時(shí)未有漏保跳閘現(xiàn)象發(fā)生,證明了鄰消抑制措施是解決漏電流過(guò)大引起漏電保護(hù)觸發(fā)問(wèn)題的一種有效方案。
4 結(jié)論
本文提出一種降低多驅(qū)動(dòng)系統(tǒng)漏電流的鄰消抑制措施。該措施在使用工業(yè)以太網(wǎng)總線保證多軸驅(qū)動(dòng)單元PWM周期同步的基礎(chǔ)上,通過(guò)改變PWM調(diào)制信號(hào)相位將相鄰驅(qū)動(dòng)單元的共模電壓反相后相互抵消,進(jìn)而使疊加在150 Hz上的高頻漏電流相互抵消,實(shí)現(xiàn)抑制漏電流。實(shí)驗(yàn)結(jié)果證實(shí)該措施具有良好的應(yīng)用效果,系統(tǒng)的總漏電流最大可有效減少近80%。在實(shí)際機(jī)床加工運(yùn)行中,能夠保證廠房漏保裝置穩(wěn)定運(yùn)行,有效降低了EMI諧波干擾,提高了數(shù)控加工裝備的整體抗干擾能力及運(yùn)行的可靠性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
建材發(fā)展導(dǎo)向(2021年15期)2021-11-05 08:22:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)外匯(2019年21期)2019-05-21 03:04:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
豬業(yè)科學(xué)(2018年4期)2018-05-19 02:04:38
