基于SSVEP信號的下肢外骨骼機器人控制系統研究
2024-04-14 18:20:34陳熙來叢佩超萬東寶李文彬
機電信息 2024年7期
關鍵詞:深度學習
陳熙來 叢佩超 萬東寶 李文彬

摘要:為了降低腦控下肢外骨骼機器人的研發成本,促進腦機接口技術的快速發展,提出一種基于深度學習與Matlab/
Simulink聯合仿真控制方法。該方法建立具有多個自由度的下肢外骨骼機器人樣機模型,并進行運動學仿真,驗證模型的合理性。利用EEGLAB對SSVEP信號進行濾波預處理,通過FFT變換將信號從時域轉換到頻域,提取SSVEP信號的頻域特征。結合深度學習理論對特征進行分類,將分類結果轉換成控制指令,控制仿真模型進行運動。實驗結果表明,該方法控制的平均準確率達到了79.8%,驗證了其可行性。
關鍵詞:腦機接口;SSVEP;深度學習;下肢外骨骼機器人;Matlab/Simulink
中圖分類號:TN911.7;TP242.3? ? 文獻標志碼:A? ? 文章編號:1671-0797(2024)07-0042-04
DOI:10.19514/j.cnki.cn32-1628/tm.2024.07.011
0? ? 引言
近年來,隨著現代醫療技術的進步,人類的平均壽命不斷延長,導致人口老齡化危機加劇[1]。在這一背景下,中風發病率預計將呈上升趨勢,為提高患者的運動能力,機器人在康復領域得到了廣泛的應用,尤其是下肢外骨骼機器人[2]。這類機器人具有針對性訓練神經和肌肉系統的能力,為患者康復提供了一種有效途徑。
下肢外骨骼機器人是一種特殊的可穿戴機器人,其融合了控制、機械和其他相關技術。傳統的外骨骼控制主要包括位置控制、力控制和位置力混合控制。然而,傳統方法通常采用被動輔助訓練模式,互動性較差。為提高人機交互性,研究人員嘗試通過腦電檢測患者的活動意圖。通過分析大腦活動時電信號的變化,利用計算機將電信號轉換成控制信號,使穿戴者通過意念控制外部設備,例如腦控輪椅和腦控外骨骼[3]。盡管2014年巴西世界杯上展示了一種由美國杜克大學研發的腦控外骨骼,但目前這一技術仍在基礎研究階段,存在控制難度大、動作幅度小和不夠精準等問題。
針對上述腦控機器人的控制精度問題,為進一步提高機器人的控制準確性,本文以下肢外骨骼機器人康復助力為研究背景,構建了一種基于SSVEP信號的下肢外骨骼機器人控制系統。本文旨在探討腦機接口技術在外骨骼機器人控制中的融合,改善傳統康復機器人的被動訓練模式,并提高人機交互性。
1? ? 系統構成
1.1? ? 框架
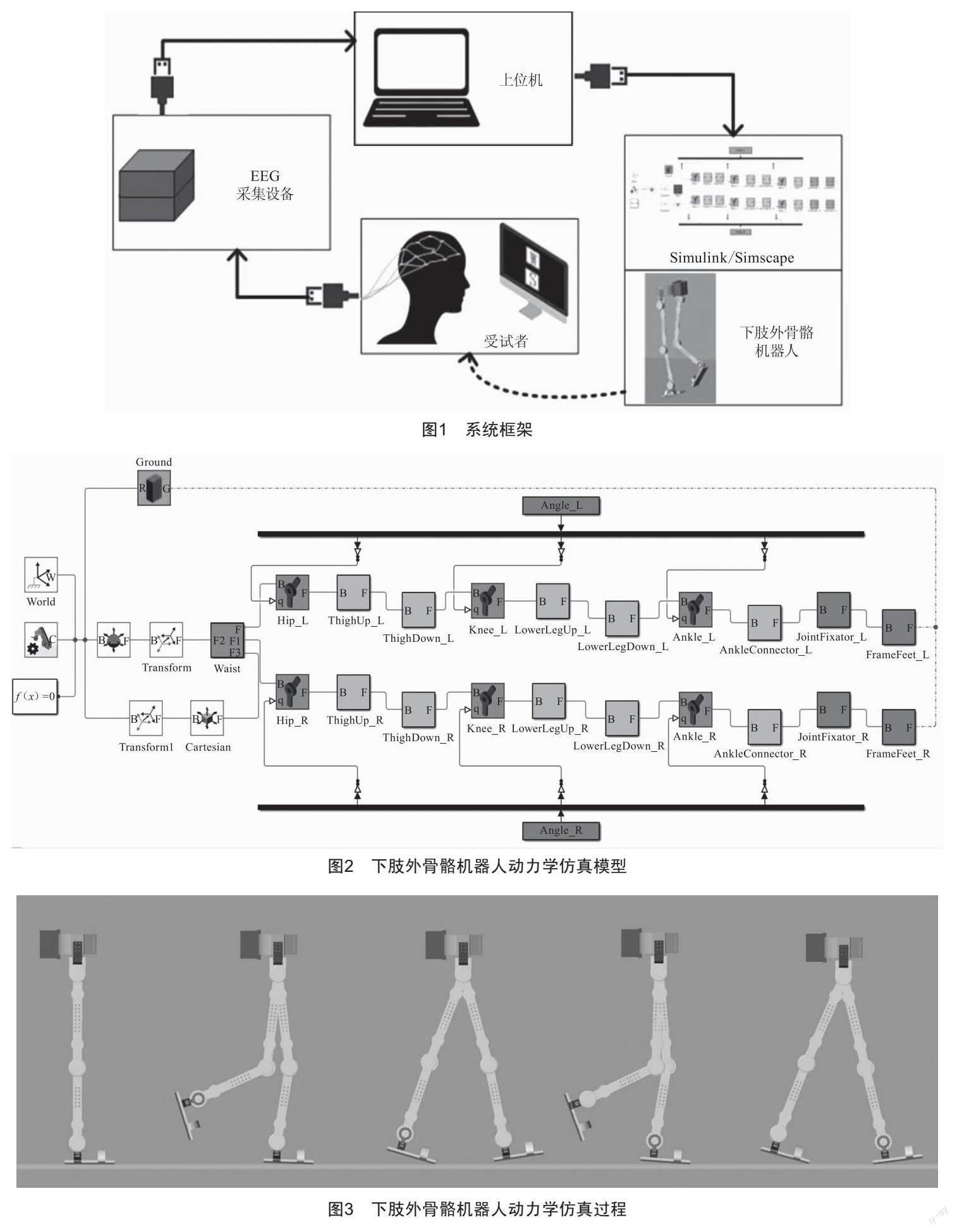
基于SSVEP信號的下肢外骨骼機器人控制系統框架如圖1所示。受試者穿戴外骨骼設備,作為被控制端提供助力。EEG記錄采用德國Brain Products(BP)公司生產的64導腦電設備,包括:BrainAmps放大器和64導Ag/AgCl電極帽。電極基于國際標準導聯10-20系統(10-20 electrode system)安置,采集頻率設置為1 000 Hz。信號通過串口傳輸至上位機進行分析處理,生成控制指令。然后,通過串口將指令發送至外骨骼模塊,以驅動Simulink/Simscape中的仿真模型運動。外骨骼模塊一次只接收一個控制指令,且每個控制指令之間的時間間隔固定。
1.2? ? 下肢外骨骼機器人模塊
機器人通過串口接收腦控命令,髖、膝、踝關節各設1個自由度,實現跟隨穿戴者運動軌跡而運動。使用預先采集的下肢運動步態數據設置機器人各關節驅動函數。基于德長三維步態與運動分析系統監測3名成年男性在平地行走時的步態,獲取關節數據,并擬合光滑處理。選取最佳步態曲線作為機器人模塊的輸入。Simulink模型細節如圖2所示,動力學仿真過程如圖3所示。
1.3? ? 腦電信號采集模塊
采集模塊由腦電帽、放大器、電極線等組成,同時配備專用的腦電采集和分析軟件BrainVision Recorder和Brain Vision Analyzer2.0,能夠連續采集受試者各部位的腦電信號。由于實驗研究重點集中在視覺功能區域的腦電變化,因此選擇大腦頂葉和枕葉區域的30個電極,導聯序號為34~42及44~64,參考電極為Cz,如圖4所示。
2? ? 實驗設計
針對實驗中的數據采集環節,由于采集要求嚴苛,故采用清華大學提供的Benchmark公開SSVEP數據集,替代數據采集環節[4]。該數據集共有64個活動電極記錄35名受試者的腦電信號。SSVEP刺激通過一個虛擬鍵盤實現,包含40種刺激頻率,信號采樣率為250 Hz,數據采集過程如圖5所示。
2.1? ? 數據預處理與特征提取
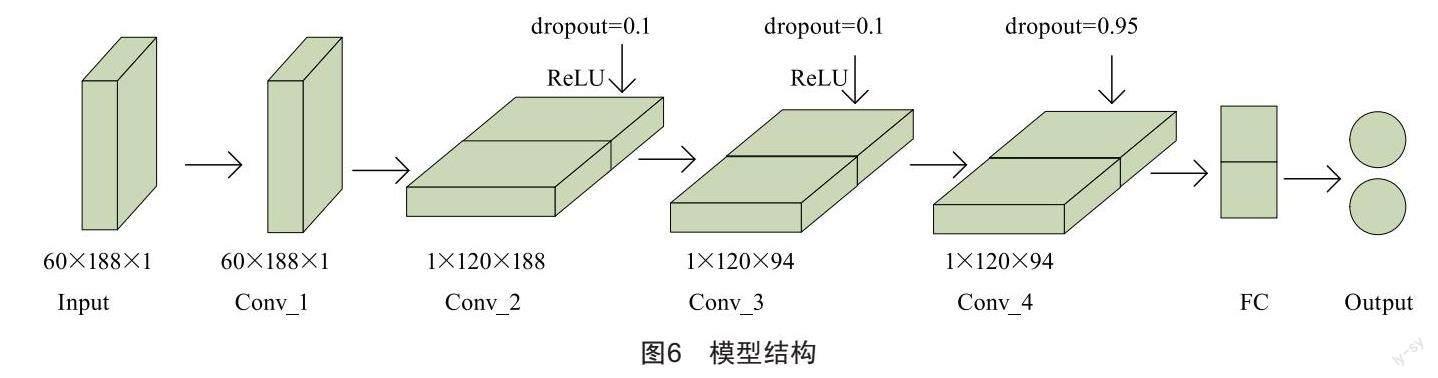
本節使用數據集的后30個受試者數據訓練模型,用前5人數據進行離線控制測試。為實現機器人啟動和停止的二分類,選取W和S兩類數據,頻率分別為14.4 Hz和10.4 Hz,每類210個樣本。鑒于深度學習模型對數據量的需求,對于導聯挑選后的數據進行兩次數據劃分擴充:去除刺激前后0.5 s數據,以1.5 s時間窗和0.5 s步長對信號進行分段。對每導聯信號進行FFT處理,取單邊頻率信息,并分類提取實部和虛部。按照原導聯順序排列,拼接成60×188×1大小的特征矩陣。網絡使用的信號長度為1.5 s,采樣頻率為250 Hz,并將兩類標簽設為1和-1。
2.2? ? 分類算法設計
本文設計的深度學習分類模型如圖6所示。該模型由6個層組成,包括1個輸入層、4個卷積層、1個全連接層和1個輸出層。模型通過卷積操作提取FFT變換得到的頻率和相位特征。卷積操作包括卷積、加偏置和激活三個步驟。卷積核對輸入特征進行卷積,加偏置后,再經過激活函數,得到特征映射矩陣。該模型使用ReLU函數作為激活函數,因為它具有計算簡單、避免梯度消失等優點。
模型使用Matlab軟件編程,Adam優化器訓練,學習率為0.000 1,迭代批次數為150,批大小為100。硬件設備為:
1)CPU:Intel(R) Core(TM) i5-9600KF,內存:16 GB;
2)GPU:NVIDIA GeForce GTX 1650;
3)顯存:4 GB。
3? ? 結果
每名受試者參與同類的SSVEP有6個試次,通過數據劃分擴充為48個樣本。前5人劃分的數據作為測試集,后30人數據作為訓練集,并進行交叉驗證。具體識別結果如表1所示。
由表1可知,5名受試者SSVEP信號分類的平均準確率為79.8%,其中3人超過80%,證明了本文設計的基于SSVEP信號的外骨骼機器人控制系統的有效性。
4? ? 討論
本文以BrainAmp腦電采集系統和Benchmark開源數據集為基礎,構建下肢外骨骼機器人控制系統,并通過離線實驗進行驗證。該系統通過SSVEP信號控制機器人移動,指令判別平均準確率達79.8%,驗證了系統的有效性。研究選用大腦頂葉和枕葉的30個電極,在保證BCI(腦機接口)性能的同時,降低了計算量,為設計廉價可穿戴腦機接口提供了參考。
5? ? 結束語
本文構建了基于SSVEP信號的下肢外骨骼機器人控制框架,并通過離線實驗證實了其有效性,該系統有望在未來實際康復治療中應用。未來的研究將專注于提高系統的實時性,為腦機接口技術在外骨骼機器人中的應用提供理論基礎和技術支持。
[參考文獻]
[1] 和明杰.中國與世界人口老齡化進程及展望對比研究[J].老齡科學研究,2023,11(12):36-51.
[2] TIAN D K,LI W T,LI J K,et al.Self-balancing exoskeleton robots designed to facilitate multiple rehabilitation training movements[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2024,32:293-303.
[3] WANG F,WEN Y Z,BI J Y,et al.A portable SSVEP-BCI system for rehabilitation exoskeleton in augmented reality environment[J].Biomedical Signal Processing and Control,2023,83:1.1-1.10.
[4] WANG Y J,CHEN X G,GAO X R,et al.A benchmark dataset for SSVEP-based brain–computer interfaces[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2016,25(10):1746-1752.
收稿日期:2024-02-27
作者簡介:陳熙來(1997—),男,湖北人,碩士研究生,研究方向:下肢外骨骼機器人、腦機接口。
通信作者:叢佩超(1980—),男,吉林人,博士,副教授,研究方向:智能化移動機器人的自主導航與控制問題。
猜你喜歡
中國教育技術裝備(2016年19期)2016-12-27 19:23:52
中國遠程教育(2016年11期)2016-12-27 18:07:31
現代商貿工業(2016年25期)2016-12-26 09:58:02
江蘇教育·中學教學版(2016年11期)2016-12-21 11:45:08
江蘇教育·中學教學版(2016年11期)2016-12-21 11:36:29
現代情報(2016年10期)2016-12-15 11:50:53
考試周刊(2016年94期)2016-12-12 12:15:04
新教育時代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(2016年32期)2016-12-01 15:25:53
軟件導刊(2016年9期)2016-11-07 22:20:49
