基于DEM-MBD耦合的液壓挖掘機(jī)動(dòng)力學(xué)仿真分析
2024-04-17 09:28:36劉暢黃笛曹超牟象東
機(jī)床與液壓 2024年5期
劉暢,黃笛,曹超,牟象東
(中國礦業(yè)大學(xué)機(jī)電工程學(xué)院,江蘇徐州 221116)
0 前言
液壓挖掘機(jī)在實(shí)際作業(yè)過程中,工況較為復(fù)雜且環(huán)境較為惡劣,導(dǎo)致其工作裝置受到的載荷較大且具有顯著的強(qiáng)時(shí)變性,因此使用虛擬樣機(jī)技術(shù)對液壓挖掘機(jī)工作裝置進(jìn)行設(shè)計(jì)與性能優(yōu)化顯得至關(guān)重要。曹源文等[1]利用ADAMS軟件建立液壓挖掘機(jī)多功能鏟斗機(jī)構(gòu)的虛擬樣機(jī)模型,并在軟件中對鏟斗機(jī)構(gòu)進(jìn)行仿真分析,提高了設(shè)計(jì)效率。李兆安[2]在ADAMS中創(chuàng)建折疊式動(dòng)臂挖掘機(jī)剛性體模型和剛?cè)狁詈夏P停趦蓚€(gè)模型中分別對其進(jìn)行動(dòng)態(tài)強(qiáng)度分析,將仿真得到的受力變化曲線進(jìn)行對比研究。秦威等人[3]提出一種試驗(yàn)與動(dòng)力學(xué)仿真相結(jié)合的方法,將測得的挖掘機(jī)挖掘過程中各個(gè)參數(shù)作為ADAMS軟件的輸入,仿真得到挖掘機(jī)主要鉸接點(diǎn)的受力變化曲線,研究結(jié)果為工作裝置疲勞壽命研究、輕量化設(shè)計(jì)提供有效的載荷譜。以上學(xué)者大多采用理論計(jì)算數(shù)據(jù)結(jié)合動(dòng)力學(xué)仿真軟件,對液壓挖掘機(jī)工作裝置進(jìn)行運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)仿真分析,這些研究方法簡化條件過多,無法準(zhǔn)確反映物料顆粒對挖掘作業(yè)性能的影響。
隨著虛擬樣機(jī)技術(shù)的快速發(fā)展,動(dòng)力學(xué)軟件ADAMS與離散元軟件EDEM聯(lián)合仿真,被廣泛用于液壓挖掘機(jī)作業(yè)性能仿真分析。王同建等[4]在實(shí)測數(shù)據(jù)的基礎(chǔ)上,利用RecurDyn與EDEM軟件對液壓挖掘機(jī)進(jìn)行聯(lián)合仿真,還原了挖掘機(jī)的挖掘作業(yè)狀態(tài)。畢秋實(shí)等[5]利用ADAMS與EDEM軟件對液壓挖掘機(jī)進(jìn)行聯(lián)合仿真,模擬計(jì)算了正鏟挖掘機(jī)挖掘過程中的挖掘阻力。陳燁等人[6]利用EDEM軟件仿真得到挖掘過程中鏟斗所受挖掘阻力,并加載到ADAMS挖掘機(jī)動(dòng)力學(xué)模型,進(jìn)行工作裝置和液壓回路參數(shù)校核以及挖掘阻力實(shí)驗(yàn)驗(yàn)證。以上學(xué)者均利用多體動(dòng)力學(xué)軟件和離散元軟件對工作裝置與物料之間的相互作用進(jìn)行了分析,但均缺乏對挖掘作業(yè)過程中鏟斗具體受力情況的分析。
本文作者以某型號液壓挖掘機(jī)為研究對象,利用ADAMS軟件建立液壓挖掘機(jī)工作裝置虛擬樣機(jī)模型,對其進(jìn)行運(yùn)動(dòng)仿真分析,利用EDEM軟件建立相應(yīng)工況的物料模型,使用ADAMS-EDEM聯(lián)合仿真對液壓挖掘機(jī)工作裝置挖掘過程進(jìn)行動(dòng)力學(xué)仿真分析,獲取鏟斗受力變化曲線及不同時(shí)刻鏟斗受力云圖,通過分析鏟斗在挖掘作業(yè)過程中受力變化情況,為鏟斗有限元分析、優(yōu)化設(shè)計(jì)提供理論依據(jù)。
1 工作裝置理論模型建立
建立液壓挖掘機(jī)工作裝置理論模型時(shí),可將液壓挖掘機(jī)工作裝置視為由關(guān)鍵桿件、液壓缸及鉸點(diǎn)確定的平面連桿機(jī)構(gòu)。工作裝置平面坐標(biāo)系示意如圖1所示。
將動(dòng)臂油缸、斗桿油缸及鏟斗油缸的長度分別記為L1、L2及L3,動(dòng)臂上A、B兩鉸點(diǎn)之間的連線與水平線之間的夾角記為θ1,斗桿上B、I兩鉸點(diǎn)的連線與AB連線延長線之間的夾角記為θ2,鏟斗上I、J兩鉸點(diǎn)的連線與BI連線延長線之間的夾角記為θ3,其中L1、L2以及L3分別與θ1、θ2以及θ3一一對應(yīng),當(dāng)L1、L2以及L3被確定后,θ1、θ2以及θ3也被確定,工作裝置的挖掘姿態(tài)即被確定[7]。在液壓挖掘機(jī)作業(yè)過程中,隨著3組液壓缸的伸長或者縮短,帶動(dòng)動(dòng)臂、斗桿及鏟斗等桿件運(yùn)動(dòng),3個(gè)夾角也會(huì)產(chǎn)生相應(yīng)變化,以此實(shí)現(xiàn)斗桿挖掘、鏟斗挖掘和復(fù)合挖掘。
以液壓挖掘機(jī)動(dòng)臂與回轉(zhuǎn)平臺的鉸接點(diǎn)A為坐標(biāo)原點(diǎn),建立直角坐標(biāo)系,根據(jù)公式[4]建立動(dòng)臂上各鉸接點(diǎn)坐標(biāo),其中G1表示動(dòng)臂的質(zhì)心所在的位置。
(1)
(2)
建立斗桿上各個(gè)鉸點(diǎn)的坐標(biāo),其中G2表示斗桿質(zhì)心所在的位置。
(3)
(4)
建立鏟斗上各個(gè)鉸點(diǎn)的坐標(biāo),其中G3表示鏟斗的質(zhì)心所在的位置。
(5)
(6)
通過測得挖掘過程中3個(gè)液壓缸的實(shí)際長度或者3個(gè)相對轉(zhuǎn)角,其他固定參數(shù)也可通過相應(yīng)的測量方法測得,將其與3個(gè)相對轉(zhuǎn)角數(shù)據(jù)結(jié)合,通過各鉸點(diǎn)相對位置坐標(biāo)公式可獲得各個(gè)鉸點(diǎn)在挖掘作業(yè)過程中相對位置[8]。
2 多體動(dòng)力學(xué)與離散元物料建模
2.1 工作裝置多體動(dòng)力學(xué)建模
建立正確的液壓挖掘機(jī)工作裝置三維實(shí)體模型是對工作裝置進(jìn)行多體動(dòng)力學(xué)仿真及離散元仿真的重要基礎(chǔ),利用SolidWorks軟件建立工作裝置三維模型,將文件格式另存為Parasolid(*.x_t)并導(dǎo)入ADAMS軟件內(nèi)[9],在SolidWorks軟件中對提示的模型錯(cuò)誤部分進(jìn)行修改,再次導(dǎo)入ADAMS軟件中進(jìn)行檢查,直至顯示建立的虛擬樣機(jī)模型正確。
為使得建立的工作裝置虛擬樣機(jī)模型模擬出液壓挖掘機(jī)真實(shí)挖掘動(dòng)作,需在工作裝置零部件間添加正確的運(yùn)動(dòng)副及驅(qū)動(dòng)函數(shù)。建立的運(yùn)動(dòng)副如表1所示。
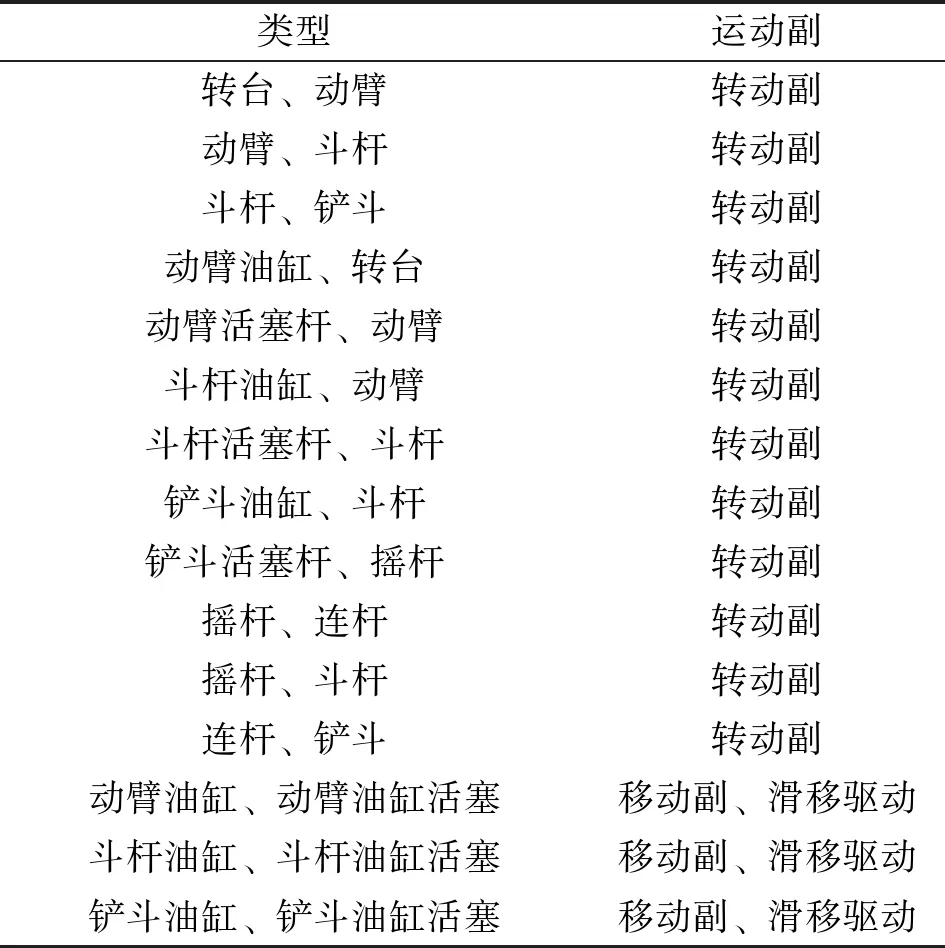
表1 液壓挖掘機(jī)工作裝置的運(yùn)動(dòng)副
為仿真出液壓挖掘機(jī)工作裝置在實(shí)際作業(yè)過程中的復(fù)合挖掘動(dòng)作,制定“挖掘準(zhǔn)備→抬臂→降臂→挖掘物料”挖掘動(dòng)作仿真過程[10],在此基礎(chǔ)上對3組液壓缸添加正確的驅(qū)動(dòng)函數(shù)。仿真前準(zhǔn)備工作完成后,可進(jìn)行工作裝置的運(yùn)動(dòng)學(xué)仿真,其中在挖掘作業(yè)過程中3組液壓缸的位移曲線如圖2所示。
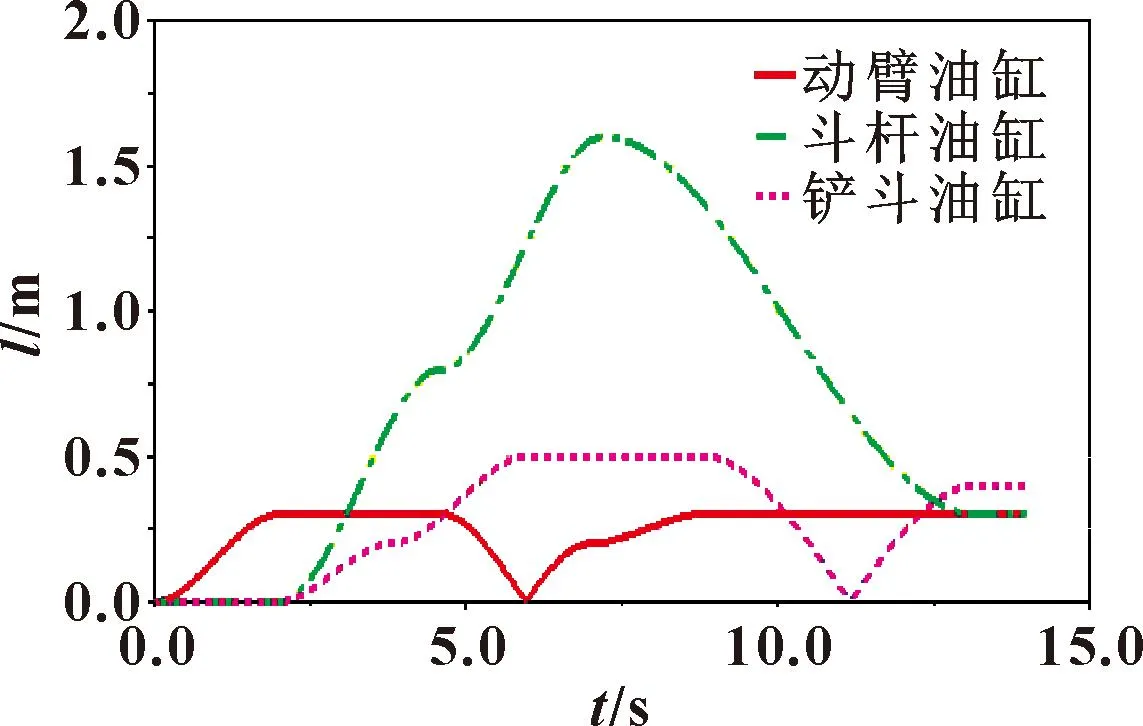
圖2 工作裝置各液壓缸仿真位移曲線
運(yùn)動(dòng)仿真完成后,可獲取液壓挖掘機(jī)工作位姿角度變化曲線,如圖3所示。在此基礎(chǔ)上,可分析得到液壓挖掘機(jī)挖掘作業(yè)過程中θ1、θ2及θ3數(shù)值變化,以此確定工作裝置各桿件上各鉸接點(diǎn)及質(zhì)心位置坐標(biāo),以便確定工作裝置的挖掘姿態(tài)。獲取液壓挖掘機(jī)鏟斗斗齒尖軌跡變化曲線,如圖4所示,得到了液壓挖掘機(jī)工作裝置在仿真過程中挖掘軌跡。通過仿真獲得的液壓挖掘機(jī)工作位姿角度參數(shù)及鏟斗斗齒尖軌跡符合液壓挖掘機(jī)真實(shí)工作情況下挖掘作業(yè)各階段位姿標(biāo)準(zhǔn),證明了建立的液壓挖掘機(jī)工作裝置多體動(dòng)力學(xué)模型的準(zhǔn)確性,為聯(lián)合仿真分析奠定了基礎(chǔ)[11]。
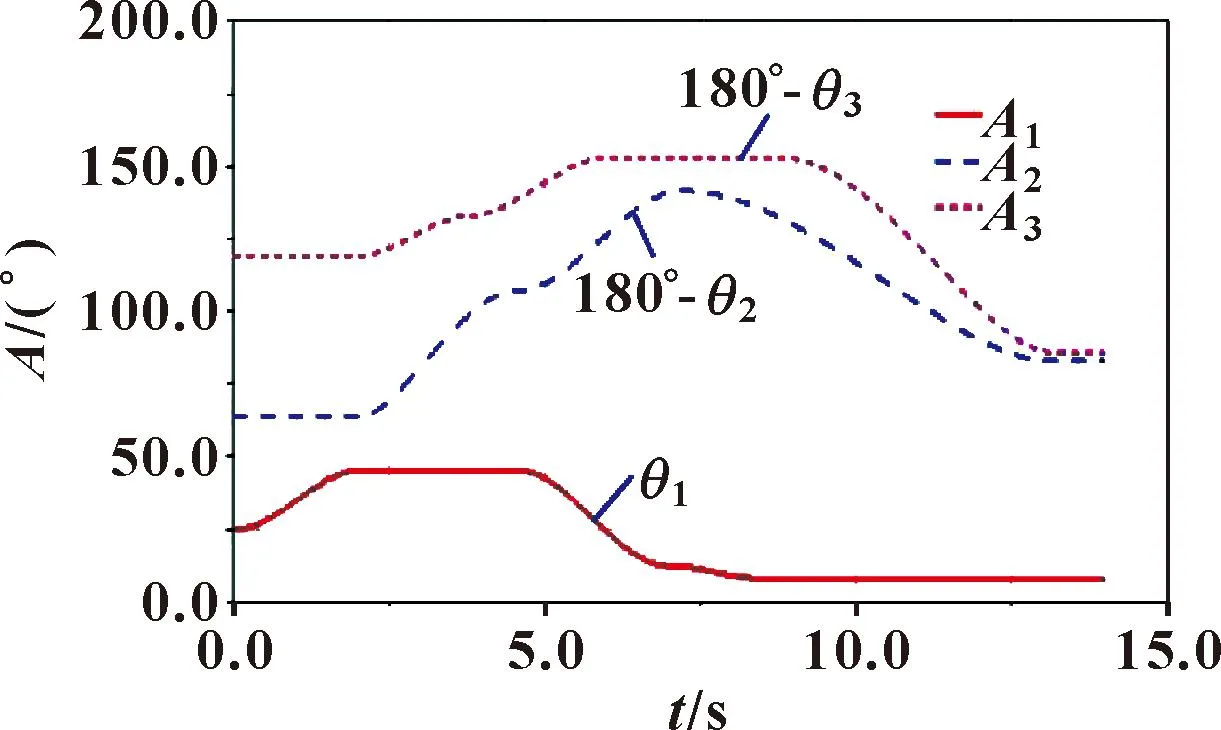
圖3 液壓挖掘機(jī)工作位姿角度變化曲線

圖4 液壓挖掘機(jī)鏟斗斗齒尖軌跡變化曲線
2.2 離散元物料建模
在實(shí)際挖掘作業(yè)中,液壓挖掘機(jī)挖掘的物料種類多樣,作者將煤塊作為物料進(jìn)行挖掘仿真。為使得EDEM中建立的顆粒模型與真實(shí)煤塊顆粒相似,以典型煤塊為模擬對象,在EDEM中對煤顆粒模型進(jìn)行尺寸以及形狀的調(diào)整,如圖5所示,隨機(jī)生成煤顆粒粒徑范圍25~75 mm。
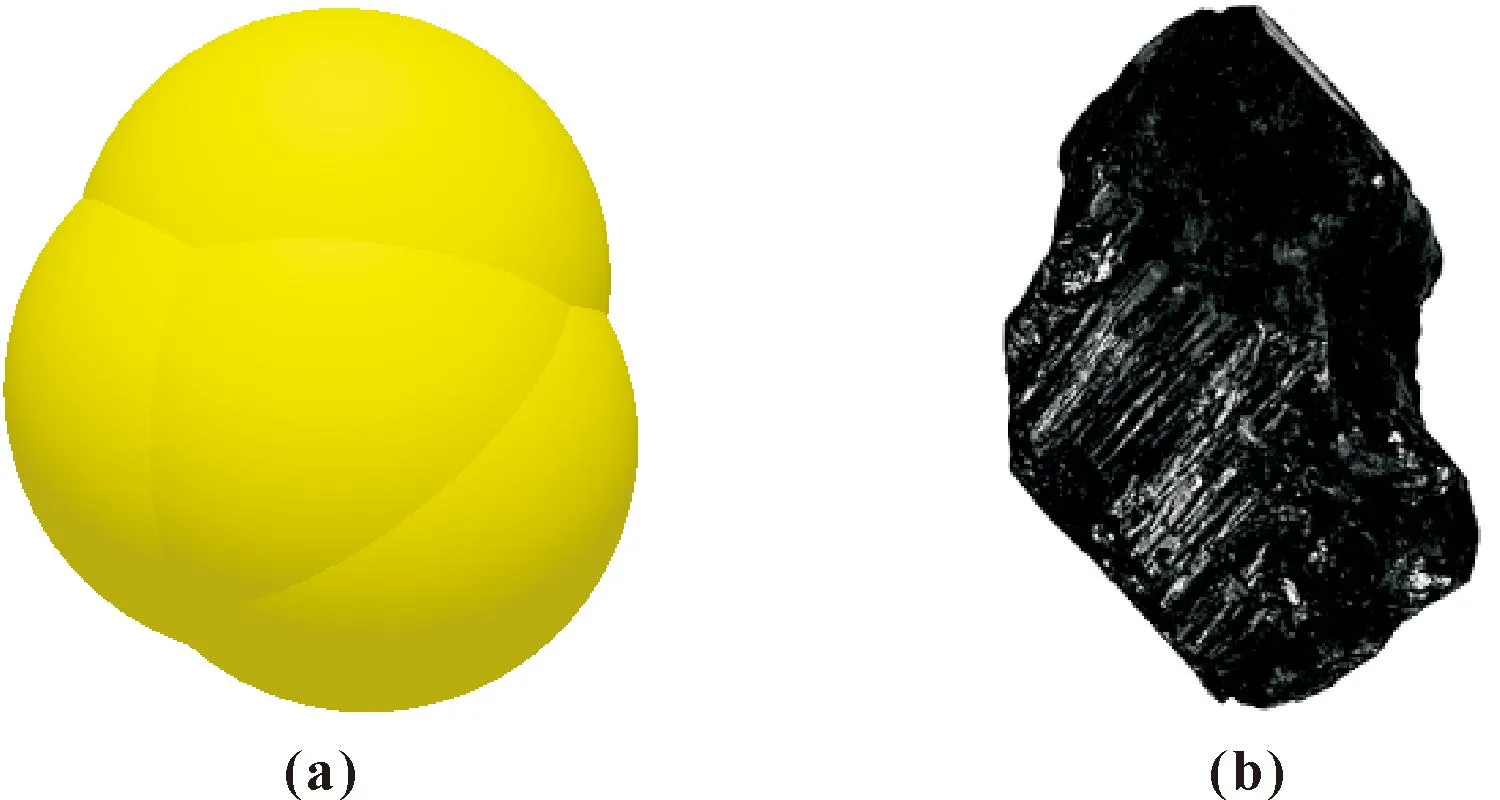
圖5 煤顆粒模型(a)以及典型煤顆粒(b)
通過查詢物料手冊以及參考文獻(xiàn)[12],進(jìn)而獲取煤顆粒以及工作裝置的本征參數(shù)以及接觸屬性參數(shù),如表2、3所示。
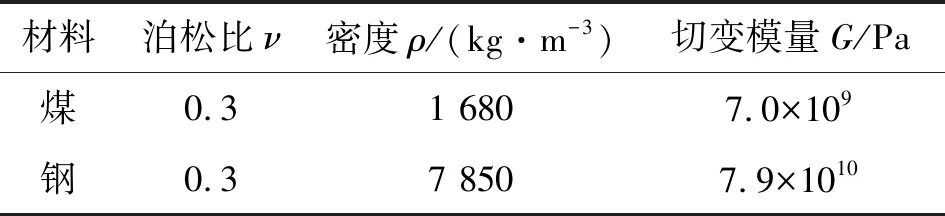
表2 不同材料本征參數(shù)
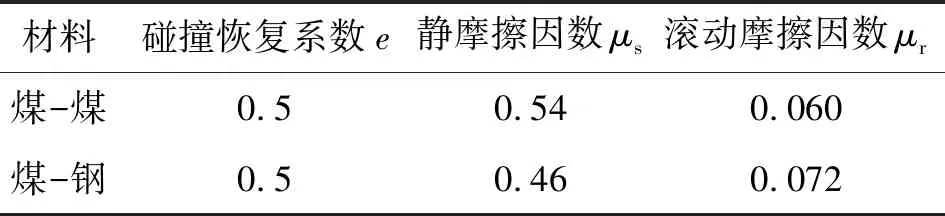
表3 材料間基本接觸參數(shù)
在EDEM中完成煤顆粒以及工作裝置的本征參數(shù)以及接觸屬性參數(shù)設(shè)置后,顆粒粒徑在25~75 mm的煤顆粒便可在顆粒工廠中隨重力產(chǎn)生,形成顆粒床模型,便于后期對工作裝置進(jìn)行挖掘仿真。
3 耦合動(dòng)力學(xué)仿真分析
3.1 DEM-MBD耦合仿真分析
基于DEM-MBD耦合仿真方法對液壓挖掘機(jī)工作裝置進(jìn)行聯(lián)合仿真,仿真過程大致可分為4個(gè)部分:在ADAMS中建立虛擬樣機(jī)模型,在EDEM中建立模型,通過ACSI配置編寫聯(lián)合仿真控制文件及仿真計(jì)算[13]。具體操作步驟如圖6所示。其中,Gforce需設(shè)置在部件質(zhì)心位置,導(dǎo)入EDEM中的三維模型的位姿與坐標(biāo)系方向要與ADAMS模型一致,且ADAMS中的模型各部件名稱與EDEM中的模型各部件名稱要一致。
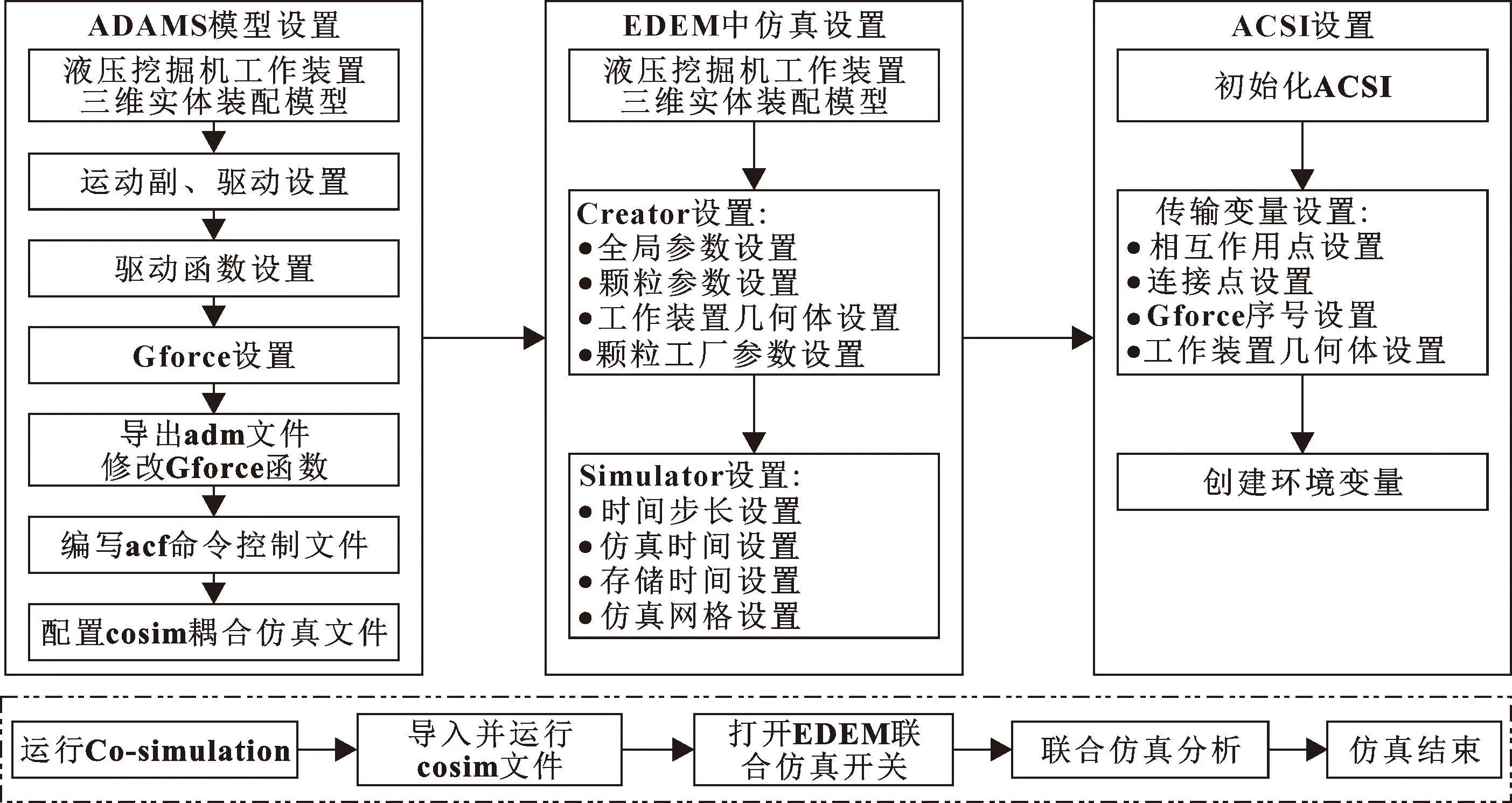
圖6 ADAMS-EDEM聯(lián)合仿真流程
基于ADAMS-EDEM聯(lián)合仿真設(shè)置完成后,在EDEM中完成液壓挖掘機(jī)挖掘作業(yè)動(dòng)作,其挖掘動(dòng)作包括:挖掘準(zhǔn)備、抬臂階段、降臂階段及挖掘階段。挖掘作業(yè)動(dòng)作階段如圖7所示。
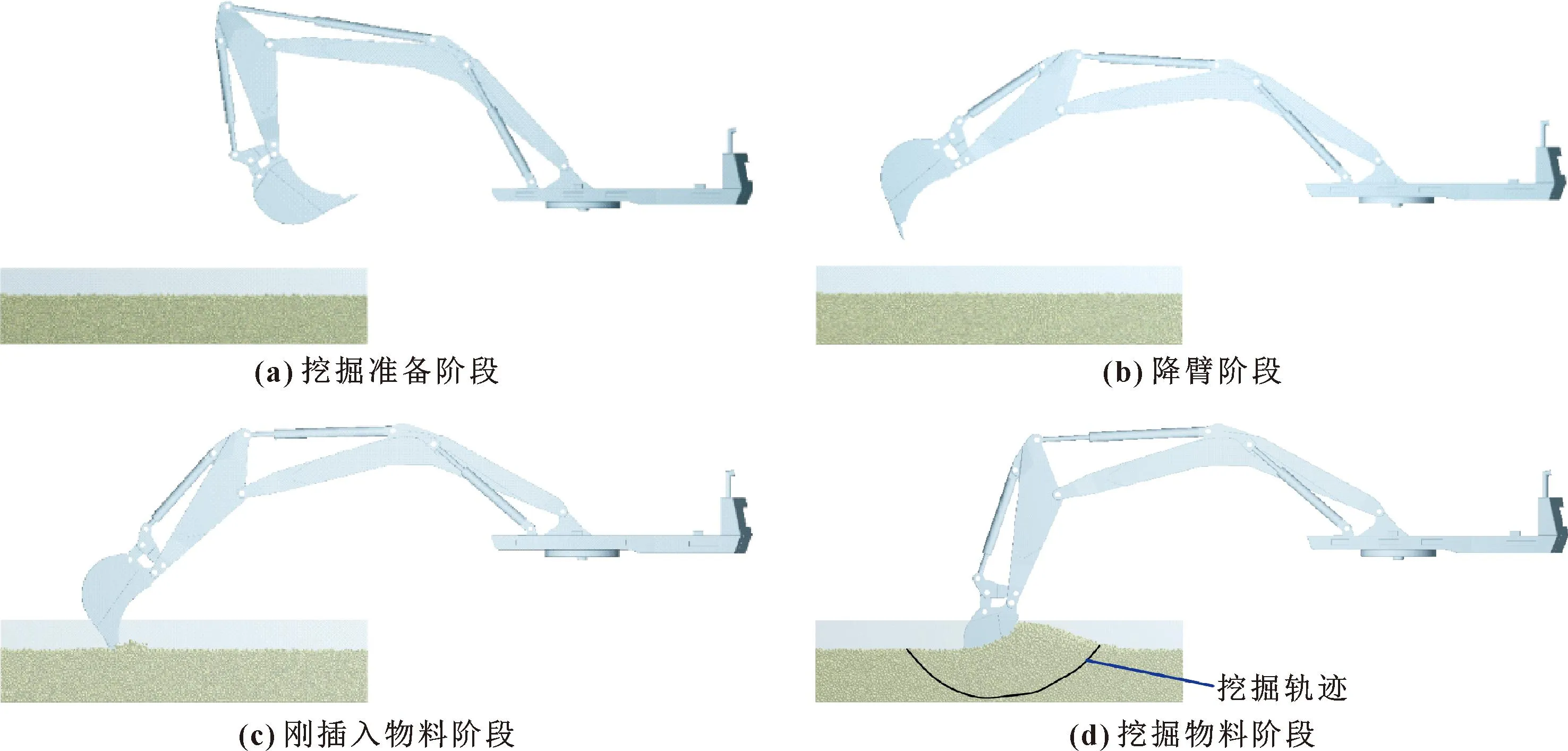
圖7 EDEM中液壓挖掘機(jī)挖掘動(dòng)作階段
3.2 離散元顆粒交互速度變化
在EDEM軟件后處理模塊中,獲取液壓挖掘機(jī)在挖掘作業(yè)中物料顆粒的速度實(shí)時(shí)變化情況,獲得離散元顆粒交互速度變化云圖,如圖8所示,能夠分析得到典型工況下顆粒的最大速度與最小速度。

圖8 離散元顆粒交互過程速度云圖
對離散元顆粒交互過程速度進(jìn)行分析,8.8 s時(shí)鏟斗剛插入物料階段,顆粒速度最大值為1.32 m/s,鏟斗周圍顆粒隨鏟斗挖掘方向運(yùn)動(dòng);在9.9 s時(shí)鏟斗開始深入挖掘物料階段,顆粒速度有了明顯提升,最大值為2.77 m/s,受擠壓的顆粒呈上升運(yùn)動(dòng);在11.5 s時(shí)鏟斗最終深入挖掘物料,顆粒堆積至物料堆邊緣。物料顆粒的微觀動(dòng)態(tài)和液壓挖掘機(jī)鏟斗交互的速度變化情況,展示了挖掘阻力的形成過程[14-15]。
3.3 鏟斗挖掘受力分析
液壓挖掘機(jī)在進(jìn)行物料挖掘作業(yè)時(shí),由于鏟斗直接與物料進(jìn)行接觸,在挖掘過程中,鏟斗受到物料顆粒作用力的影響,在仿真過程中,鏟斗在8.3 s后開始與物料進(jìn)行接觸,選取8.3~11.5 s時(shí)間段獲取鏟斗受力變化曲線圖,如圖9所示。
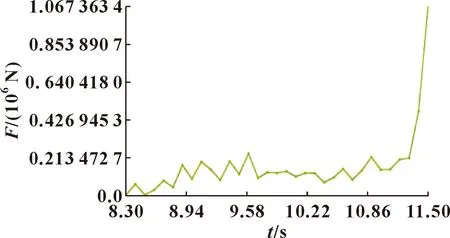
圖9 鏟斗受力F變化曲線
從圖9能夠看出:8.3 s后鏟斗開始與物料接觸,鏟斗受到物料作用力開始呈上升趨勢,受力主要來自于物料顆粒與鏟斗斗齒尖接觸力;在8.3~11.1 s時(shí)間段內(nèi),鏟斗開始逐漸深入挖掘物料,導(dǎo)致物料顆粒之間以及物料顆粒與鏟斗之間相互擠壓,物料顆粒的位置不斷進(jìn)行調(diào)整以及重新穩(wěn)定,使得鏟斗受力在該時(shí)間段內(nèi)呈一定波動(dòng);11.1~11.5 s時(shí)間段內(nèi),鏟斗逐漸完成挖掘作業(yè),鏟斗內(nèi)物料數(shù)量逐漸增多,物料重力、物料與鏟斗摩擦阻力不斷增加,鏟斗受力呈明顯上升趨勢,在11.5 s時(shí),鏟斗受力達(dá)到約1.07×106N。為了表明鏟斗受力具體情況,獲取不同時(shí)刻鏟斗受力云圖,如圖10所示。
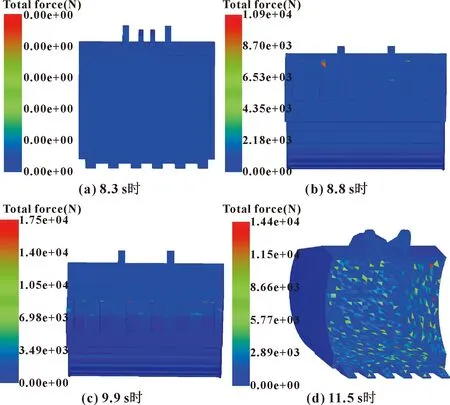
圖10 不同時(shí)刻鏟斗內(nèi)腔受力云圖
從圖10能夠看出:8.3 s時(shí)鏟斗并未與物料接觸,因此鏟斗不受物料顆粒作用力;8.8 s與9.9 s時(shí)鏟斗正處于逐漸深入挖掘物料階段,其所受的作用力大部分集中于鏟斗斗齒尖位置,在對鏟斗優(yōu)化設(shè)計(jì)時(shí),鏟斗斗齒應(yīng)為重點(diǎn)優(yōu)化部件;11.5 s時(shí),鏟斗處于深入挖掘物料階段,此時(shí)鏟斗受到的最大作用力集中于右內(nèi)側(cè)板處,應(yīng)當(dāng)對此位置進(jìn)行適當(dāng)加固處理。鏟斗受力云圖表明了鏟斗在挖掘物料過程中所受物料作用力變化情況,為后期對鏟斗進(jìn)行有限元分析及優(yōu)化設(shè)計(jì)提供了數(shù)據(jù)及理論依據(jù)。
4 結(jié)論
根據(jù)液壓挖掘機(jī)挖掘物料實(shí)際工況,建立液壓挖掘機(jī)工作裝置虛擬樣機(jī)模型和物料離散元模型,利用ADAMS和EDEM對工作裝置挖掘物料過程進(jìn)行DEM-MBD耦合仿真,對液壓挖掘機(jī)挖掘物料進(jìn)行動(dòng)力學(xué)仿真分析,通過仿真分析工作裝置與物料顆粒相互作用時(shí)顆粒速度云圖,了解了液壓挖掘機(jī)工作裝置挖掘阻力的形成過程。獲取挖掘過程中鏟斗受力變化曲線以及不同時(shí)刻鏟斗受力云圖,分析得到鏟斗受物料作用力情況,為鏟斗進(jìn)行有限元分析及優(yōu)化設(shè)計(jì)提供了數(shù)據(jù)及理論依據(jù)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
故事大王(2016年7期)2016-09-22 17:30:08
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
兒童故事畫報(bào)(2013年3期)2013-06-24 05:40:30
