基于激光視覺的鞋底噴膠路徑生成方法研究
2024-04-22 09:27:44林澤敏袁清珂鄭倍松劉輝
機械工程師 2024年4期
林澤敏,袁清珂,鄭倍松,劉輝
(廣東工業大學 機電工程學院,廣州 510006)
0 引言
鞋底上膠是鞋類生產過程中最為重要的工序之一,上膠效果的好壞直接決定了鞋子的質量[1]。目前,對鞋底的涂膠一般采用人工作業的方式。手工涂膠的方式存在著一些明顯的缺點:首先,涂膠的位置和涂膠的用量由操作工人決定,操作工人的熟練程度直接決定了涂膠的質量。此外,在涂膠過程中,膠水揮發出的氣體對工人的健康造成嚴重的影響[2]。因此,實現鞋底的自動化涂膠非常重要。
在科學技術進步的推動下,工業機器人在噴膠方面的應用也越來越成熟[3]。將工業機器人應用在鞋類噴膠上,將有效提高產品的質量,減少膠水揮發出的氣體對人體的傷害,降低勞動力成本[4]。
實現噴膠工序的自動化關鍵在于噴膠路徑的自動生成。針對這一問題,Kwon等[5]提出了一種可以根據鞋底的輪廓自動生成噴膠路徑的方法。該方法簡單直觀,但提取的噴膠路徑是一條平面曲線,只適用于平面鞋底。Kim[6]提出了一種基于鞋底的三視圖自動生成噴膠路徑的方法。該方法雖然適用于不同鞋底,但需要在不同的平臺實現,操作復雜,且精度難以保證。
針對上述問題,本文提出了一種新的基于激光視覺生成鞋底噴膠路徑的方法。使用線激光三維掃描儀掃描鞋底,對采集到的鞋底深度圖進行研究。
1 圖像預處理
1.1 鞋底深度圖
利用線激光三維掃描儀采集到的鞋底深度圖像如圖1所示。圖像中像素點的像素值與鞋底實際高度成正比例關系。

圖1 深度圖
1.2 平滑處理
由于獲取的圖像中不可避免地會出現一些噪聲,因此需要對噪聲進行消除,保留圖像的原始細節特征。噪聲的存在會干擾圖像的有效信息,如果處理不好會影響后續的圖像處理和分析[7]。中值濾波既能有效消除噪聲,也可以較好地保護圖像邊緣的細節,所以選擇中值濾波進行平滑處理。
中值濾波通過選擇一定形式的窗口在圖像的各點上移動,對窗內的像素灰度值進行排序,用排序中間值代替窗中心點處的像素灰度值[8]。對采集到的鞋底圖像進行中值濾波處理,為了更加清楚地展示濾波效果,通過三維數據顯示中值濾波處理后的結果,如圖2所示。

圖2 去噪效果圖
2 鞋底內邊緣提取
鞋底內邊緣是指鞋底內側面與鞋底外側面的交線,由鞋底邊緣區域的最高點組成。在鞋底自動化噴膠處理中,噴膠不能超出鞋底內邊緣(是鞋底的邊界線),對鞋底噴膠的定位有重要作用。
2.1 邊緣檢測算法
圖像中的邊緣是像素灰度值發生加速變化而不連續的結果。邊緣可以粗略地分為階梯狀邊緣和屋頂狀邊緣[9]。階梯狀邊緣,它兩邊的像素灰度有明顯的突變,是由最大梯度方向的一階方向導數的極大值點所組成的集合。屋頂狀邊緣,它位于像素值從增加到減少或由減少到增加的變化轉折點,可由一階方向導數的零交叉點確定。
鞋底內邊緣類似于屋頂狀邊緣,則可以用基于一階導數的邊緣檢測算子進行檢測。基于一階導數的邊緣檢測算子有Roberts算子、Prewitt算子、Sobel算子等[10]。
Roberts算子根據對角元素的差來近似偏導數。表達式如式(1)和式(2)所示:
其卷積模板為:
Prewitt算子和Sobel算子是在Roberts算子的基礎上改進,使得Prewitt算子和Sobel算子的近似比Roberts算子的近似更精確,采用3×3卷積模板,如下所述。
1)Prewitt算子卷積模板:
2)Sobel算子卷積模板:
如圖3所示,是各種算法算子(Roberts算子、Prewitt算子、Sobel算子)所提取邊緣輪廓的圖像。
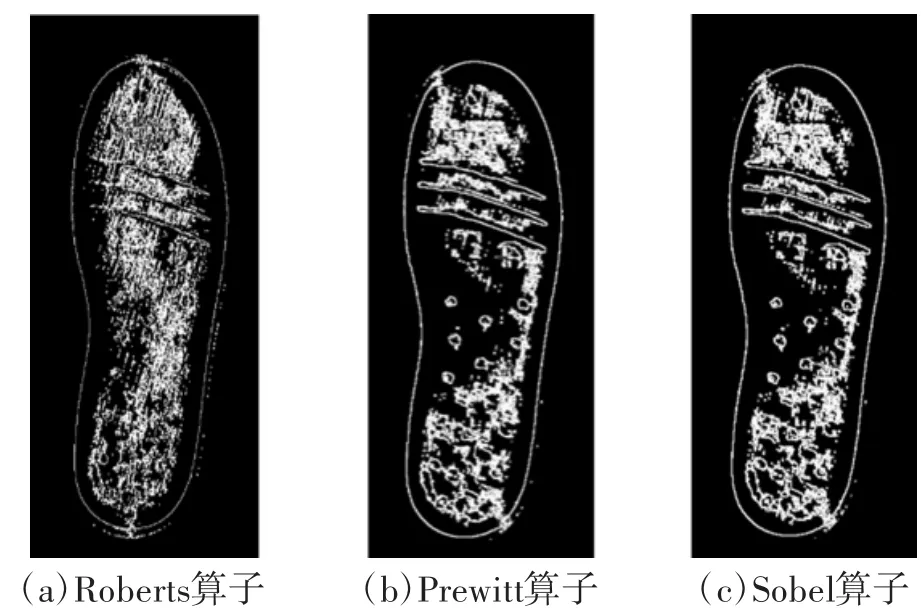
圖3 邊緣檢測效果對比圖
2.2 分區最大值算法
如圖3所示,圖像提取的邊緣并不好,沒有完整地提取出需要的鞋底內邊緣。同時,仍有大量無用信息,需要額外處理,因此本文提出了一種分區最大值算法用于鞋底內邊緣提取,算法的基本流程如圖4所示。算法具體描述如下:1)外邊緣輪廓提取。利用Moore邊界追蹤算法進行鞋底外邊緣輪廓提取。2)獲取質心。通過質心定位算法獲取鞋底外邊緣輪廓的質心。3)提取內邊緣點。通過建立分區,搜尋像素最大值的方法提取鞋底內邊緣點。4)插值獲取內邊緣。利用三次NURBS插值算法獲取平滑的內邊緣。
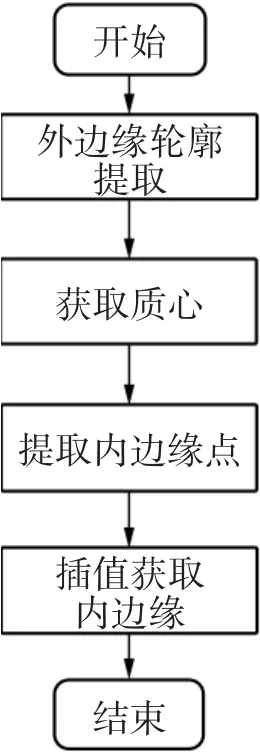
圖4 算法流程
2.2.1 提取鞋底外邊緣輪廓
Moore邊界追蹤算法[11]是提取圖像中邊界信息的一種算法。基本思想如圖5所示,算法的步驟如下:1)找到一個黑色像素P,并將它定為起始像素(將從網格的左下角開始掃描像素,直到遇到一個黑色的像素,將其作為起始像素)。2)當遇到黑色像素P時,將P設置為當前邊界像素點。3)原路返回到先前到達的白色像素,以順時針方向搜索P的摩爾鄰域內的每一個像素,直到遇到下一個黑色像素。4)重復步驟2)和步驟3),直到第二次進入起始點與第一次進入的方向相同時算法停止。
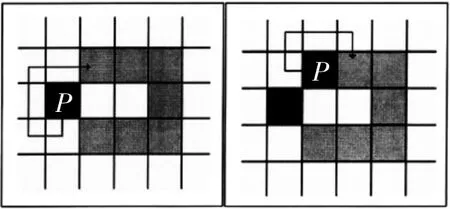
圖5 Moore邊界追蹤算法的追蹤過程
在整個運行過程中走過的黑色像素就是目標的邊界像素。
利用Moore邊界追蹤算法獲取到的鞋底外邊緣輪廓如圖6所示。

圖6 外邊緣輪廓提取
2.2.2 獲取鞋底外邊緣輪廓的質心
通過質心定位算法[12]獲取鞋底外邊緣輪廓的質心,假設質心為I(X,Y),鞋底外邊緣輪廓點的坐標分別為Q1(X1,Y1),Q2(X2,Y2),Q3(X3,Y3),…,Qn(Xn,Yn),質心的坐標計算公式為
式中:Xi為點的橫坐標,Yi為點的縱坐標。
如圖7所示,交叉線的中心為外邊緣輪廓的質心。
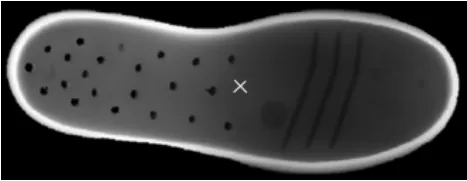
圖7 外邊緣輪廓的質心
2.2.3 提取內邊緣點
取鞋底外邊緣輪廓點Qi(i=1,2,…,n)與鞋底外邊緣輪廓的質心I構建直線段Li(i=1,2,…,n),搜索各直線段Li上像素值最大的點pi(i=0,1,…,n)加入內邊緣點集P。
由此可以得到離散的內邊緣點,如圖8(b)所示。

圖8 分區極值法獲取內邊緣點
2.3 插值獲取內邊緣
為了獲得精度較高的噴膠路徑,需要對離散的內邊緣點進行插值處理,以獲得平滑的內邊緣線。
利用三次NURBS插值算法[13]對離散的內邊緣點進行插值。三次NURBS曲線的表達式為
式中:u為NURBS曲線的自變量;di(i=0,1,…,n)為NURBS曲線的控制頂點;wi為控制頂點的權因子,w0>0,wn>0,其余wi≥0,而且連續k個權因子不能同時為0;Ni,3(u)是三次規范B樣條基函數,由節點矢量U=[u0,u1,…,un+4]決定。
Ni,3(u)滿足如下遞推關系:
利用積累弦長參數化法[14]對內邊緣點pi(i=0,1,…,n)參數化得到節點矢量U。
對于C2連續的三次NURBS閉曲線,其首末數據點重合,所以三次NURBS閉曲線的控制頂點的反算公式為
其中:
由式(8)和式(9)即可求得控制頂點di(i=0,1,…,n-2)。
根據節點矢量和控制頂點,就可以得到所求的內邊緣曲線。
3 噴膠路徑的生成
理想的噴膠路徑應該是鞋底內邊緣線向鞋底內側偏移得到的偏移曲線。
可以通過曲線等距偏移算法[15]對鞋底內邊緣線進行偏移,得到鞋底噴膠路徑。曲線等距偏置算法表達式為:
式中:D0(u)為偏移后的噴膠路徑曲線,D(u)為鞋底內邊緣曲線,d為偏移距離,N(u)為鞋底內邊緣曲線法矢量,D′(u)為鞋底內邊緣曲線的一階導數,D″(u)鞋底內邊緣曲線的二階導數。
通過上述分析,將得到的坐標數據點進行分析處理,得到的鞋底內邊緣和噴膠路徑如圖9所示。
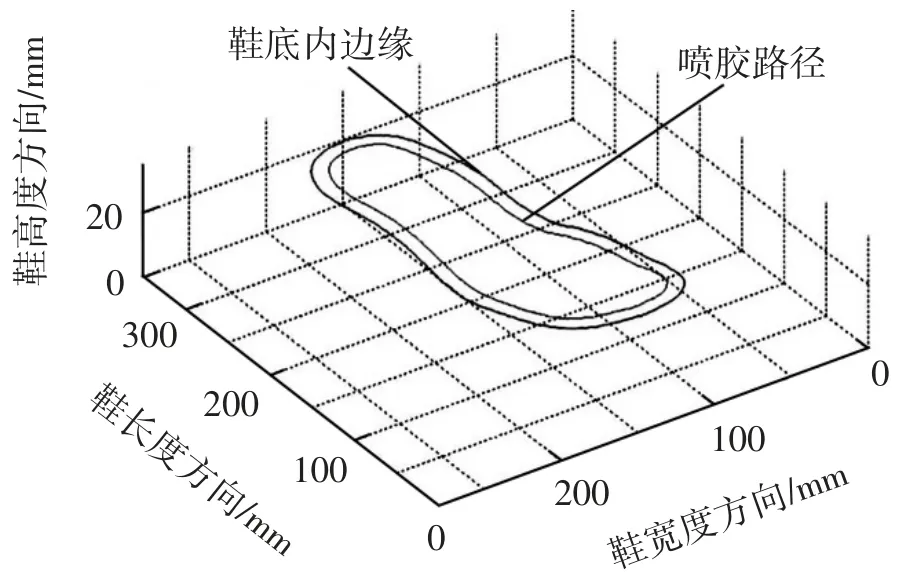
圖9 鞋底內邊緣和噴膠路徑
4 系統結構
噴膠系統硬件上主要由ABB六軸工業機器人、工控機、PLC、光電開關、線激光視覺掃描儀,傳送帶等幾個部分組成。系統結構的組成如圖10所示。

圖10 系統結構組成
系統工作原理可簡述為:鞋底在傳送帶上運動,當鞋底經過光電開關時,光電開關會產生脈沖信號并傳送給PLC,觸發PLC輸出信號,控制線激光三維掃描儀進行拍照取圖,進而在工控機上進行圖像處理,以提取噴膠路徑。得到噴膠路徑并發送給工業機器人,當鞋底隨傳送帶移動定長到達噴膠工位后,控制工業機器人噴膠。
5 試驗與分析
試驗借助ABB系列工業機器人完成鞋底的噴膠工作。將噴槍安裝在機械手末端,控制ABB機器人按獲取到的噴膠路徑噴膠。從噴膠試驗結果圖11(b)中可以看出,鞋底內邊緣沒有膠水溢出,鞋底內部一周噴膠均勻,滿足制鞋工藝鞋底黏合要求;同時,本文提取噴膠路徑算法所用時間為1.23 s左右,符合實際生產需求。
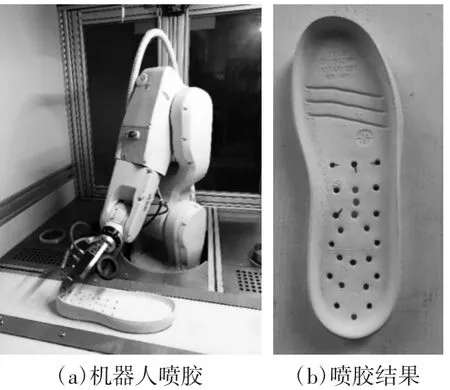
圖11 鞋底噴膠試驗
6 結語
本文提出了一種自動生成鞋底噴膠路徑的方法。利用線激光三維掃描儀獲取鞋底深度圖,采用中值濾波方法對鞋底深度圖進行預處理。利用邊緣檢測算法對鞋底深度圖像進行分析。與邊緣檢測算法相比,分區最大值算法提取的內邊緣輪廓更好。最后,通過將得到的內邊緣曲線偏置得到噴膠路徑。通過機器人噴膠試驗,驗證了該方法的有效性和可行性。該方法能有效地獲取噴膠路徑的三維信息,適用于不同型號的鞋底噴膠路徑生成,操作簡單,通用性強。