考慮車身搖晃和滑移的無人農機航向控制技術*
2024-04-26 17:55:10湯艷玲劉藍晴
南方農機 2024年8期
李 蒙 ,王 源 ,湯艷玲 ,王 鵬 ,劉藍晴 ,夏 宇
(揚州大學機械工程學院,江蘇 揚州 225127)
0 引言
精準農業與智慧農業是國家提出的重大發展戰略,無人農機是推動傳統農業向精準化、智慧化轉型升級的重要工具[1]。無人農機工作在以松軟、濕滑與泥濘田間路況為主的復雜環境下,極易發生滑移現象,其具有幅值范圍寬、無法預知等特點,對農機轉向輪的轉動角及航向系統均會產生較大影響。眾多研究表明,農機的路徑跟蹤主要通過控制航向來實現。因此,航向控制性能對農機位置控制起到至關重要的作用,同時也密切關聯著其軌跡控制精度、工作精度和效率,所以研究未知大側滑情形下的無人農機航向控制技術具有重大意義。
目前,針對農機航向控制主要分為基于運動學和基于動力學模型的方法。基于運動學模型的航向角控制系統不需要諸如路面-輪胎作用力、變量耦合關系與非線性特性等參數,將航向角變化率等效為前進速度和輪胎轉向角的非線性函數,使得控制方案具有結構簡單和易于實現等優點。為此,一些控制方法被成功應用到了航向角控制系統設計中。文獻[2]采用PID 控制方法,將航向偏差與橫向偏差加權合成為綜合誤差進行控制,提高了無人農機的航向控制精度。文獻[3]采用模型預測控制(Model Predictive Control,MPC),將遺傳算法參數優化器與標稱系統模型預測控制器復合以降低無人農機航向控制誤差。文獻[4]采用終端滑模控制方法,通過非線性干擾觀測器對模型參數進行優化以抑制系統抖振,提高了無人農機航向控制精度。但是,基于運動學模型的控制方法未考慮角運動中農機所受到的合外力矩、變量之間的耦合關系、模型非線性特性以及外部復雜的作業環境影響。因此,航向角閉環系統普遍具有魯棒性不強和跟蹤精度不高[5]等缺點。為此,研究人員提出建立農機的航向動力學模型,并以此為基礎設計航向角控制系統。文獻[6]采用線性二次調節控制器,結合系統辨識所建立的動力學模型,實現了對航向角的柔化控制。但是滑移率、土壤性質等非線性變化不易精確建模,導致控制效果不理想[7]。文獻[8]采用MPC 和滑模控制器進行分層控制的方法,通過對航向控制中的不確定性因素進行抑制,降低了無人農機的航向角跟蹤誤差。文獻[9]采用自抗擾控制方法,并通過粒子群算法對控制系統參數進行優化以提高無人農機的航向控制精度。文獻[10]采用魯棒控制方法,通過使用魯棒精確微分器來估計集中擾動并加以補償,抑制了大擾動對無人農機航向控制精度的影響。文獻[11]采用滑模控制與有限時間控制復合的方法,通過在有限時間內抵消擾動效應以提高無人農機的航向控制精度。雖然上述基于動力學模型的控制方法取得了一定的研究成果,但是仍舊存在如下幾點待改進之處。
1)大多數文獻建立航向角動力學模型需要精確的參數。農機的作業環境極為復雜,地面環境與氣候、土質和前茬作物等因素密切相關,其物理特性難以掌握,有時甚至難以測定,使得地面與輪胎之間的作用力具有很強的非線性、時變與不確定特性,其數學關系難以或者不能建立。
2)大多數文獻并未考慮地面不平整所引發的車體側翻與俯仰運動。農機的作業環境非常復雜,地面平整度較差,因而側翻與俯仰運動加劇了農機的側滑,且此影響不能忽略。
3)大多數文獻并未考慮滑移造成的影響。一方面,滑移使得農機產生不確定的附加航向角速率,對航向角造成較為嚴重的干擾;另一方面,滑移容易帶給轉向輪附加角度,使得農機的控制力矩出現不確定性,加大了農機的控制難度。
為此,本文考慮側翻與俯仰運動,建立農機的六自由度運動模型,提出一種可同時補償匹配與不匹配干擾的航向角預測控制方法,以提升系統跟蹤精度與抗干擾的魯棒性。
1 運動建模
1.1 運動分析
在建立運動模型之前,需要分析農機運動情況(車體構型、幾何參數、受力、速度和滑移)。本文選取四輪構型農機為研究對象,其前輪用于轉向,后輪用于驅動。車體幾何參數與受力情況如圖1(a)所示,相關速度變量與滑移分析如圖1(b)所示。
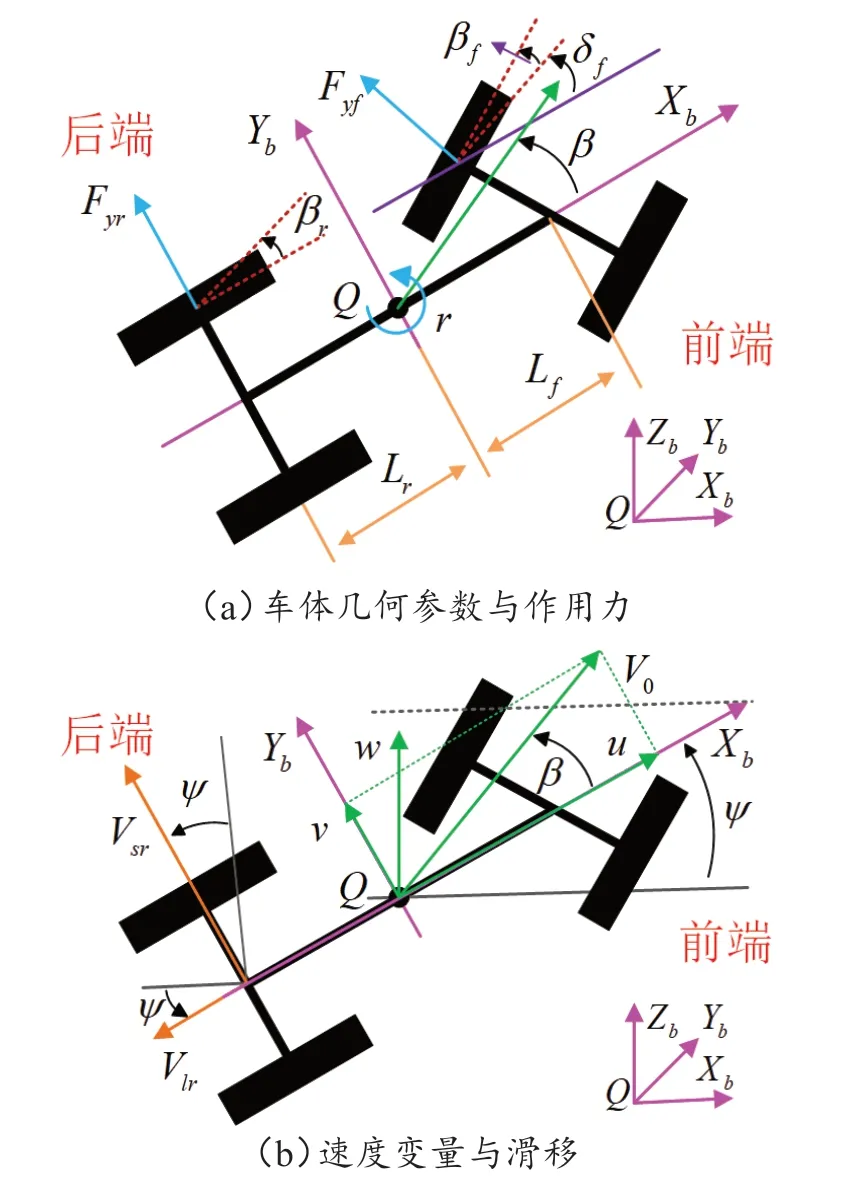
圖1 運動示意圖
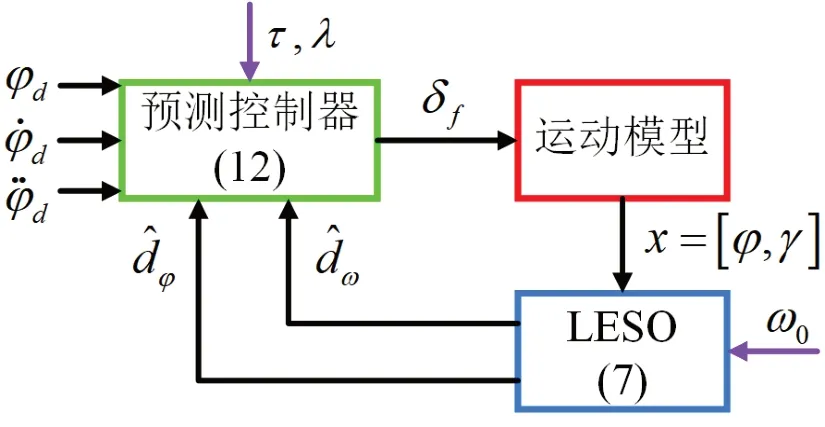
圖2 控制框圖
用符號{B}表示車體坐標系,與農機重心固連。圖1中各個變量的含義如表1所示。
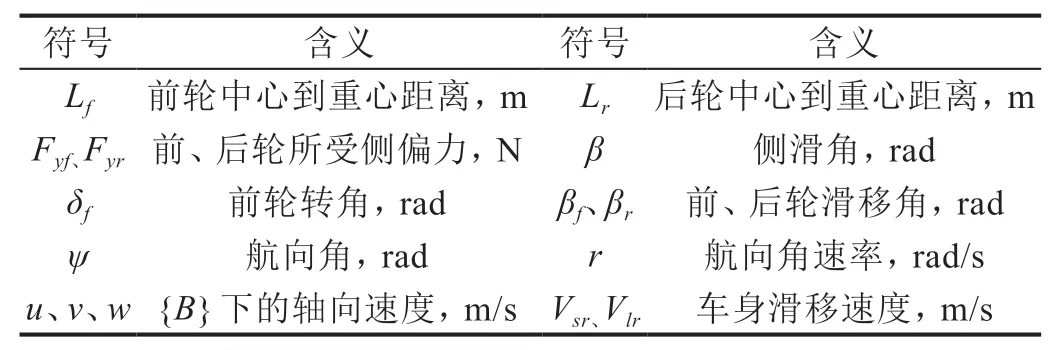
表1 變量名稱與含義
1.2 運動學模型
一般情況下,研究人員在設計路徑跟蹤控制系統時認為農機僅做平面運動,其角運動僅有航向(繞QZb軸)方向,依靠航向角控制降低路徑跟蹤誤差。但是,在非常松軟的路面與水田等復雜作業環境下,農機并非做平面運動,車身容易繞QXb軸和QYb軸產生搖晃(分別記為φ與θ),這兩個搖晃角會在QZb方向產生分量,進而影響路徑跟蹤的精度,因此必須考慮兩個搖晃角帶來的影響。
記:p與q分別為農機繞QXb與QYb軸的轉動角速率。考慮搖晃角φ、θ以及滑移速度的影響,根據文獻[12],對ψ求導可得農機的航向角運動學模型:
正常作業時農機的運行速度較低,因此搖晃角φ、θ與Vsr均具有慢時變特性,即均成立。
1.3 動力學模型
結合文獻[13]可得,考慮前輪滑移角Δδf的農機側偏角可表示為:
農機受到的側偏力可用如下線性關系近似表示:
其中,cf與cr分別為輪胎前、后輪側偏剛度系數。
結合式(3)、圖1(a)與文獻[12],農機的航向角動力學模型為:
其中,Ix、Iy與Iz分別為農機繞QXb、QYb與QZb軸的轉動慣量,Ixz為慣性矩;γr為未建模動態和外部干擾復合而成的不確定項。
但是,在設計控制器時,br的使用值與實際值之間必定會存在誤差,因此,式(4)可改寫為:
2 控制系統設計
本節首先設計干擾觀測器[14],用以估計匹配干擾dr0和不匹配干擾dψ;其次,設計預測控制器,用以提升航向角系統抗干擾的魯棒性。
2.1 干擾觀測器設計
定義:x=[ψ,r]T,b=[0,ˉbr]T,D=[dψ,dr0]T,則公式(1)和公式(5)可寫成如下緊湊形式[12]:
由于農機的航向角和角速率可分別通過傳感器測得,因此,針對公式(1)和公式(5),可設計如下線性干擾觀測器:
其中,z1∈R2用于估計x,z2∈R2用于估計D;β1和β2為觀測器增益,其取值按照式(8)確定:
2.2 預測觀測器設計
記航向角參考信號為ψd,定義跟蹤誤差為e=ψψd,并用dψ和dr0的估計值和代替真實值得到:
則在預測時域長度τ>0 時,跟蹤誤差e的預測值可表示為:
選擇如下性能指標函數:
其中,λ>0為系統輸入的懲罰因子。
根據極值存在必要條件?J/?δf=0,并結合式(9)至式(11)可得系統的控制律:
2.3 控制流程
農機航向角控制系統的設計流程可用如下控制框圖表示。
3 仿真驗證
本節通過數值仿真實驗將所提方法與基于傳統運動學的MPC 方法進行對比以證明所提方法的優越性。本文所用控制器參數值:ω=0.2π rad/s,λ=0.001,t=0.08 s。期望航向角:ψd=0.1sin(ωt) rad。無人農機的模型參數為:m=1 441 kg,g=9.81 N/kg,Lf=1.011 m,Lr=0.789 m,Ix=1 927 kg·m2,Iy=1 262 kg·m2,Iz=791 kg·m2,Ixz=50 m4,Cf=96 475 N/rad,Cr=106 475 N/rad,Vsr=0.5 m/s,Vlr=0.5 m/s。仿真中系統的初始值為:u(0)=3 m/s,v(0)=0,φ(0)=0。為了全面地說明所提方法的優越性,定義k=br/,分別設置了k=0.5,k=1,k=1.5 三種不同的擾動估計準確度,仿真及對比結果如圖3至圖6 所示。
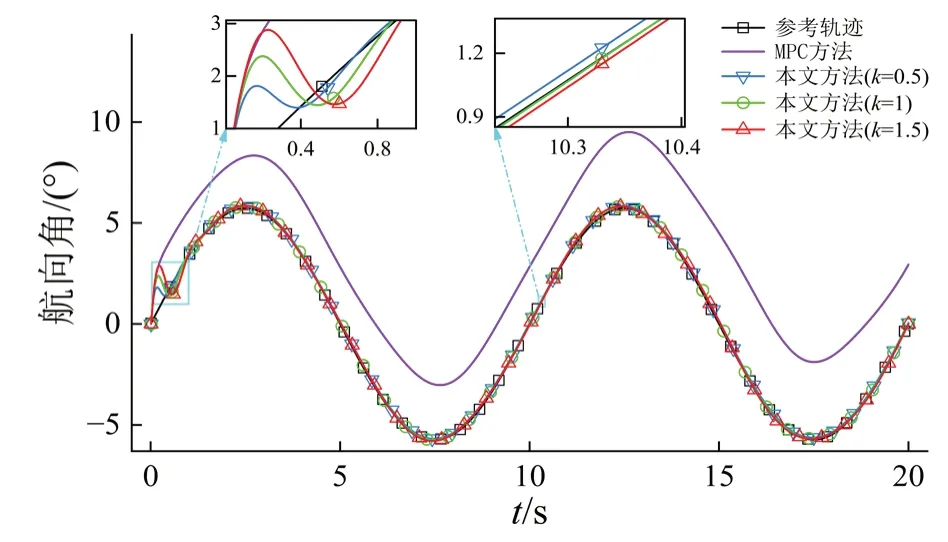
圖3 航向角
仿真結果表明,基于本文所提方法的航向角控制效果明顯優于傳統的基于運動學模型的MPC 方法。由圖3 和圖4 可得,基于MPC 方法的最大跟蹤誤差達到4.732°,平均誤差達到3.225°,且閉環系統未進入穩態。而所提方法的最大跟蹤誤差僅為2.122°,平均誤差僅為0.105°,穩態誤差最大值僅為0.149°,穩態平均誤差僅為0.057°,相較于MPC 方法,航向角跟蹤精度得到大幅提升。因此,在不需要詳細運動模型及參數的情況下,所提方法將航向角的最大跟蹤誤差降低了55.16%,平均誤差降低了96.74%,且在1.5 s 內迅速達到穩態,顯示出更高的控制精度和魯棒性。這是因為所使用的干擾觀測補償機制極大地削弱了外部干擾和模型參數攝動對控制精度的影響;對比于參數沒有發生攝動的情形,本文方法在±50%大攝動情形下的控制精度與無攝動情形幾乎相同,這是因為預測控制方法可使得干擾觀測器在存在較大估計誤差時也能保證閉環系統具有很高的控制精度和較強的魯棒性。
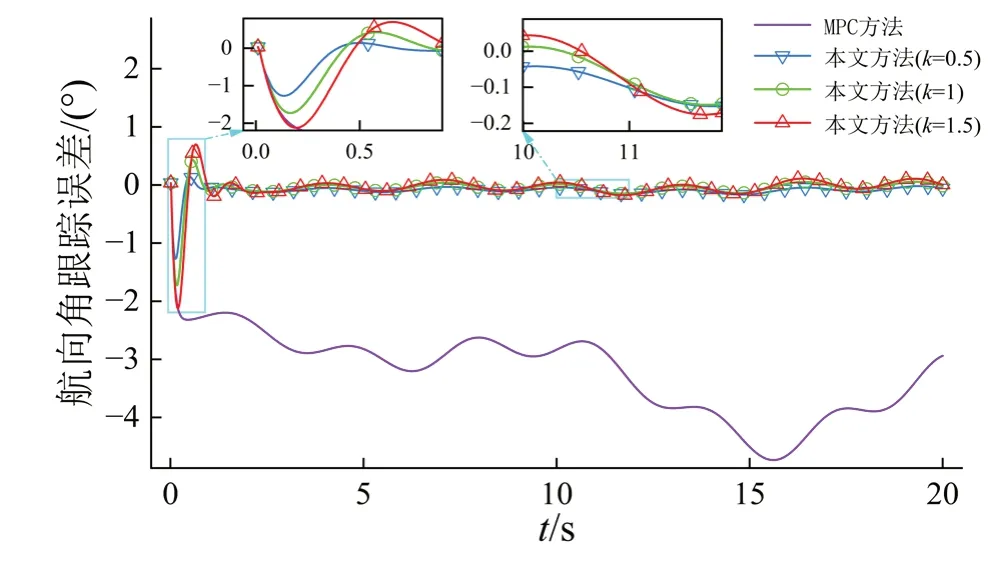
圖4 航向角跟蹤誤差
由圖5 和圖6 可得,本文方法下的前輪轉角與航向角速率在前1.5 s 內波動較大,這是由于仿真初始階段的干擾估計值與實際值的偏差較大。而在1.5 s后,估計值變得非常精確,波動逐漸趨于平穩,這是由于預測控制方法提高了閉環系統的魯棒性,使其在大干擾和估計偏差較大時可保證控制的精度。對比于沒有參數攝動的情形,即使在±50%的參數大攝動情形下,前輪轉角與無攝動情形幾乎相同,說明本文方法具有更好的魯棒性。
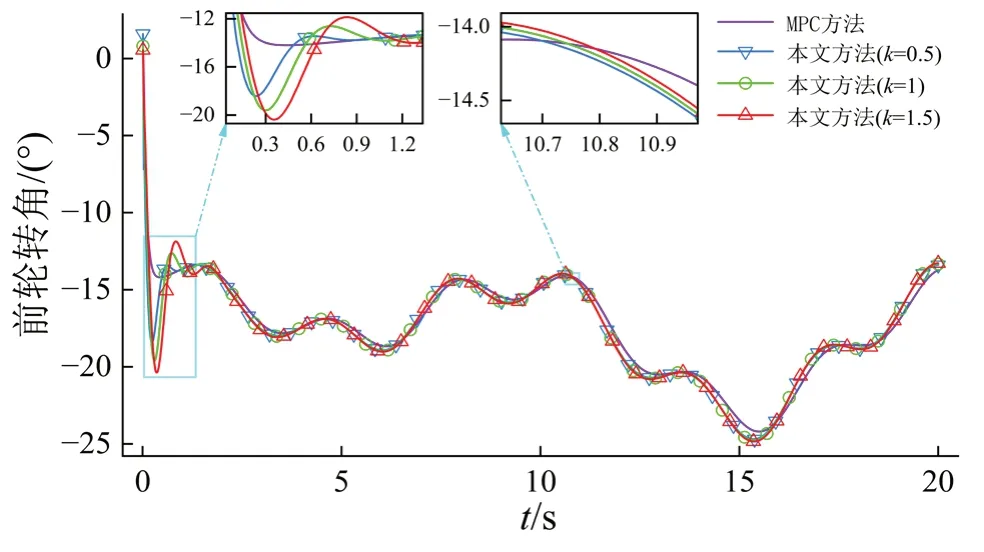
圖5 前輪轉角
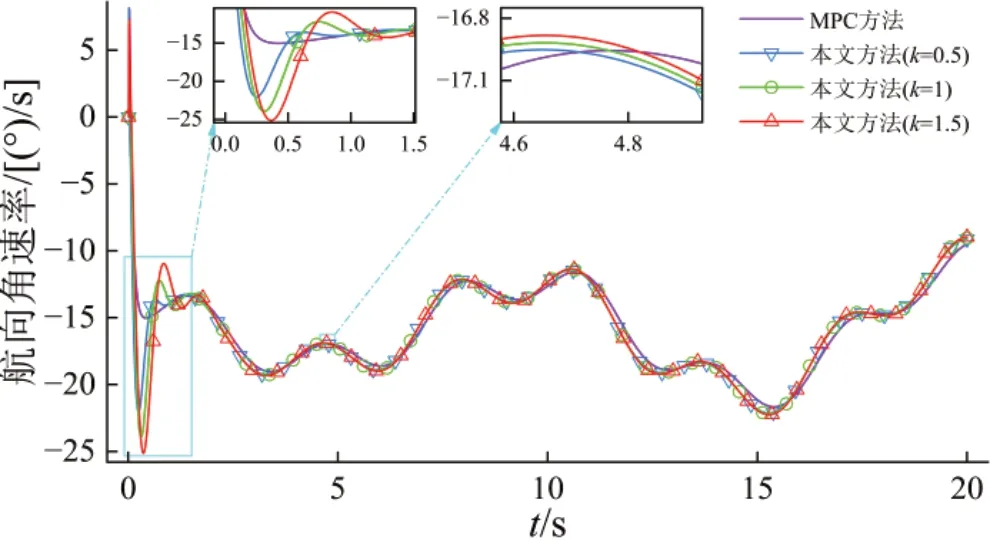
圖6 航向角速率
4 結論
本文針對復雜作業環境下無人農機航向系統易受車身搖晃和大滑移影響的問題,提出一種魯棒性較強的航向角抗干擾預測控制方法。仿真結果表明,相較于傳統的基于運動學模型的MPC 方法,所提方法極大提升了航向跟蹤精度和抗干擾的魯棒性,在復雜作業環境下基于所提方法的無人農機航向系統具有更好適應性和應用前景。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
