基于人工智能算法的農業機械自動化控制方法研究
2024-04-26 17:55:16宋鵬
南方農機 2024年8期
宋 鵬
(貴州省機械電子產品質量檢驗檢測院,貴州 貴陽 550014)
隨著科技的發展,人工智能技術在農業機械控制領域得到了越來越廣泛的應用,我國是農業大國,農業機械化水平的提高對于保障國家糧食安全、促進農業現代化具有重要意義[1]。然而目前我國農業機械控制方式仍以手動操作為主,自動化程度較低,不僅耗費大量人力物力,也無法實現精細化管理。為實現農業機械的自動化、智能化,開展農業機械自動控制技術研究迫在眉睫。人工智能技術是實現農業機械自動化控制的關鍵技術之一。基于感知、學習、決策等功能,人工智能可以根據作物生長環境的變化來調整控制參數,實現對農業機械的閉環控制。本文針對常見的農業機械,研究設計了基于人工智能算法的自動化控制系統,該控制系統能夠實現對作業過程的感知及決策調整,具有一定的智能性、靈活性和適應性。
1 人工智能算法在農業機械控制中的基本原理
人工智能算法實現農業機械自動化控制的核心在于環境感知與智能決策[2]。典型的方法是構建標定模型,實時獲取各種作業參數,經過分析計算后對設備的狀態和作業過程進行評估與決策。例如,在拖拉機自動導航系統中,需要獲取導航定位模塊輸出的機器人姿態、GPS 坐標、里程計數據、慣性測量數據等,同時獲取圖像識別模塊對田間作物和地形的分析結果,根據標定模型計算出最優路徑,并將運動控制量和作業參數下發執行,完成田間作業。具體來說,人工智能算法的環境感知主要通過傳感器獲取各類數據信號,例如距離傳感器、導航傳感器可以實時監測周圍的障礙物和地形;溫濕度傳感器、光照傳感器可以感知外界的環境參數;載荷傳感器可以測試裝載質量;質構傳感器可以分析土壤成分比例等。這些傳感數據經過標定換算,可以精確反映作業環境的狀態。然后,算法會對數據進行多元分析,提取關鍵特征,判斷當前的作業環境與模式,預測可能的異常情況。例如,如果測得溫度過高、光照過強,那么算法會提前判斷可能出現的作物枯萎或其他情況,根據優化模型準備相應的控制策略。在環境分析的基礎上,人工智能算法最核心的功能就是智能決策[3]。決策系統綜合考量作業目標、環境狀態、機械負荷等多種因素,計算出最優的控制參數組合,并將其轉換為運動學控制量,實現對農業機械的閉環控制。決策系統還具有自我迭代和持續學習的能力,它會根據執行結果不斷完善和增強控制模型,以適應復雜多變的農業環境,實現智能化、精確化、自動化控制。
2 基于人工智能算法的農業機械自動化控制系統設計與實現
2.1 控制系統整體架構設計
基于人工智能算法的農業機械自動化控制系統由傳感層、網絡層、計算層和應用層組成。傳感層主要包括工況檢測模塊、環境檢測模塊等,通過各類傳感器采集農業機械的工況數據、環境數據,并經過信號調理后輸送到網絡層[4];網絡層主要實現不同傳感器信號的融合,構建了控制總線,并將數據標準化后上傳到計算層;計算層是核心決策層,集成了作業輔助決策系統、避碰導航系統、執行控制系統等算法模塊。這些智能算法模塊對傳感數據進行深度分析,制定出控制策略;應用層將計算層的控制指令解碼為電機的驅動信號、執行機構的開關信號等,最終驅動農業機械的運行。該系統總體采用分層約束的架構方式,下層的數據流主要是底層信號的采集和傳輸,上層則側重于信息處理和決策控制。各層之間通過標準化網絡互聯,提高了系統的開放性和兼容性。同時,系統具有一定的容錯能力和健壯性。如果某一傳感器失效,不會影響其他傳感器工作;如果局部網絡中斷,系統可以自主切換到降級工作模式,這保證了系統的高可靠性。
在具體實現中,傳感層所使用的傳感器類型有溫濕度傳感器、GPS 傳感器、圖像傳感器、載荷力傳感器、傾角傳感器等,可以采集周圍環境溫度、濕度、定位、地形、作物和土壤特征等數據。網絡層采用規范的CAN 總線(傳輸速率可達1 Mbps)進行數據傳輸,保證了實時性。計算層中的算法模塊采用的是改進的LSTM 神經網絡,可以處理時間序列,對歷史數據進行訓練審視,實現更準確的預測和決策。應用層將控制指令轉換為PWM 驅動信號(頻率可調,精度±0.5%),用以驅動水泵(流量范圍0~100 L/min)、噴頭(噴霧面積10 m2~100 m2)等執行機構,也可直接控制電機(功率范圍2 kW~20 kW)、舵機(轉角精度±0.1°)的運轉,從而精確控制農業機械的自動化作業。
2.2 控制系統硬件設計
控制系統的硬件采用模塊化設計,各組件通過標準接口互連,主要分為處理器模塊、傳感模組、執行模塊、通信模塊和穩壓供電模塊[5]。其中,處理器模塊采用的是STM32F427 單片機,其Cortex-M4核心具有浮點運算單元和DSP 指令,運行主頻高達180 MHz,片上SRAM 192 KB,能夠有效支持神經網絡算法模型的部署運行,滿足控制算法的計算需求。圖像處理采用的是卷積神經網絡SoC 芯片,適用于圖像識別及特征提取,可有效減輕主控MCU 的負載。傳感模塊集成了變速脈沖編碼器,用于獲取運行軸轉速;還有噪聲傳感器,用于測量作業過程中的噪聲水平。另外還有溫度傳感器、濕度傳感器等,用于測量環境條件,防止機械過熱或積水。這些傳感參數會實時反映機械裝置的動作和工況狀態[6]。執行模塊能夠將控制指令轉換為PWM 脈沖信號,進而驅動舵機、步進電機等執行機構,完成精確的運動控制。考慮到耐久性要求,輸出驅動芯片采用了車規級芯片,能適應惡劣工作環境。通信模塊支持CAN 總線、Wi-Fi 等標準通信接口。通過這些接口可以將傳感器數據匯聚傳輸至計算單元;也可以將控制指令分發至執行模塊,實現對各個執行機構的協調控制[7]。電源模塊提供了寬溫度范圍、低噪聲的穩壓供電電路,輸出電流高達20 A,可以為控制系統的各個部分提供清潔且穩定的電源。該電源系統還具備過流保護、過壓保護、短路保護等功能,提升了系統的安全性和健壯性。
2.3 控制系統軟件設計
控制系統軟件分為操作系統層、算法框架層和應用接口層。操作系統層采用FreeRTOS 實時操作系統。它具有實時性、預置性、優先級管理等特性[8],可以根據控制算法和數據采集的需要靈活分配CPU資源和調度任務優先級,保證處理器高效穩定地運行。算法框架層實現了傳感驅動模型、神經網絡模型、優化求解器等組件。其中,傳感驅動模型負責標準化各類傳感數據,轉換為訓練模型的輸入;神經網絡模型(ResNet 結構,20 層深度)實現對作業環境的分析判斷;優化求解器(采用貝葉斯超參數優化算法)則基于當前狀態計算出最優控制策略。模型訓練使用IoT 邊緣計算平臺,數據集來源于歷史數據和模擬數據。數據庫使用SQLite 數據庫管理作業日志、環境數據等信息,便于算法框架的模型優化和決策的持續改進[9]。數據庫采用索引結構,寫入速度可達1 000 次/s,讀取速度可達3 000 次/s。應用接口層通過OPC UA、MQTT 等協議,實現與底層硬件的標準互聯,封裝了通信驅動和功能驅動兩個子層。底層通過CAN 總線、串口獲取傳感數據,上層可直接調用功能驅動層的方法,以實現對水泵流量、噴頭模式等的控制。該軟件系統具有模塊間松耦合、可配置化的特點,兼具靈活性與可擴展性[10]。未來,可通過升級算法模型和新增應用驅動,實現對更多類型農業機械的智能化精確控制。
3 試驗設計與結果分析
3.1 試驗設計與實施
為驗證所設計農業機械自動控制系統的性能,開展了測試驗證試驗。試驗的目的是檢驗控制精度、作業質量以及系統穩定性。試驗所使用的農業機械平臺是某公司生產的八輪自走噴霧機器人。該機器人行走速度18 m/min,轉彎半徑小于20 m,噴孔數量36 個,配備特高壓軸流泵,最大流量100 L/min,試驗載藥液為20%懸浮劑的百草枯水劑。試驗區選擇了某農場的標準試驗田,面積為2 hm2,地形復雜性較低。在試驗初期,對該自走噴霧機器人的噴霧性能和避障性能進行了測試,結果符合使用要求。接著,上傳了經訓練的自動導航與執行控制模型以及與特高壓水泵匹配的閉環控制模型,啟動智能控制模式下的試驗。測試過程中,調整導航路徑和執行策略,使液體最終覆蓋率達到要求的98%以上,這表明導航定位精度和執行控制精度都比較高。在后期模擬異常情況的測試中,隨機斷開一個執行機構的控制信號,控制系統能夠檢測到異常,啟動備用執行機構進行補償操作,以保證作業質量。此外,通過調整環境參數,模擬了在不同光照條件、溫度和作物葉面積下的試驗,控制系統都能根據環境狀態實時調整算法模型,自動校正執行策略,表現出了較強的適應性和穩定性。
3.2 試驗結果分析與討論
通過對試驗過程的觀測分析,總結了自動控制模式下系統的主要性能,如表1所示。
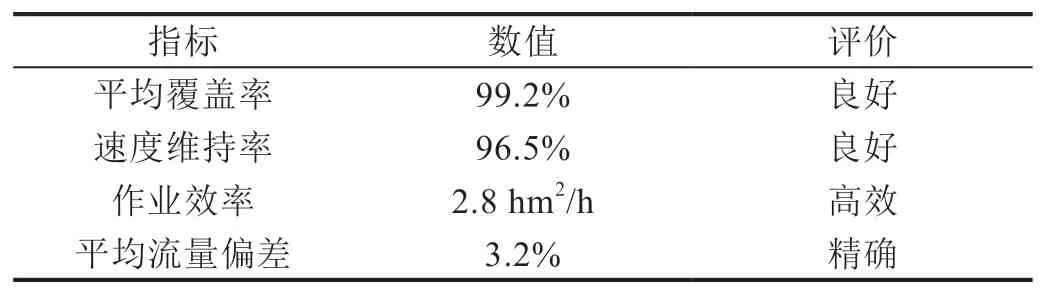
表1 自動控制模式下的主要性能指標
從表中可以看出,在自動駕駛與執行控制模式下,噴霧機器人實現了較高的懸浮劑覆蓋率,達到99.2%,且導航速度只有少部分時間下降,基本維持在設計值(96.5%),這說明定位導航足夠精確,遍歷覆蓋效果好。由于導航路徑和速度控制比較理想,平均作業效率達到2.8 hm2/h,大大提高了作業效率。另外,特高壓泵的流量控制也比較準確,控制精度為±3.2%,在可接受的范圍內。與手動控制模式相比,該智能化控制系統自動適應環境,無需人工干預,效率更高。試驗期間,當隨機斷開一個噴霧執行機構后,系統快速啟動了備用機構工作,未出現明顯的混淆,這表明系統在復雜環境下也能保證穩定性。通過試驗驗證,所設計的基于多源異構數據融合的農業機器人自動控制系統,能夠實現精確的作業控制,具有環境適應性強、控制精度高的特點,滿足了智能化農業裝備的自動控制需求。
4 結語
本文針對農業機械的自動化控制需求,研究設計了一套基于多源異構數據融合與人工智能算法的智能化控制系統。該系統通過環境監測與智能決策實現了對農業機械的閉環控制,試驗結果表明,該系統具有控制精度高、適應性強的優點。可見,人工智能技術為實現農業機械的智能化、精細化控制提供了有效手段。隨著傳感技術、通信技術與算法模型的不斷優化,人工智能技術將在更多農業機械的設計與應用中發揮重要作用,有助于減輕農民的勞動強度,提高農業生產效率。當前,該智能控制系統主要應用于單機種的定向作業,未來,可嘗試建立統一的作業指揮平臺,實現多機種協同與優化調度,形成完整的數字化、網絡化農機系統,推動我國農業整體的智能化與現代化進程。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
商界(2019年12期)2019-01-03 06:59:05
IT經理世界(2018年20期)2018-10-24 02:38:24
小康(2017年16期)2017-06-07 09:00:59
故事大王(2016年7期)2016-09-22 17:30:08
南風窗(2016年19期)2016-09-21 16:51:29
