開關柜合格性檢驗的力矩奇異性特征分析方法
2024-04-27 00:16:52楊明達鄒焱飚
機械設計與制造 2024年4期
張 鐵,楊明達,鄒焱飚
(華南理工大學機械與汽車工程學院,廣東 廣州 510640)
1 引言
開關柜是分配電能的重要開關設備,其負責分配電能并隔離故障,整個配電網的安全性和可靠性均依賴開關柜的性能,其在配電網中發揮著重要作用[1]。開關柜中斷路器小車能否正常的由工作位置運行到試驗位置是驗收開關柜的一項重要指標。在旋轉手柄將斷路器旋進工作狀態時,如果出現卡阻、碰撞時,若不及時停機退回,會導致斷路器接觸不良、發熱,進而產生危險。其中,開關柜斷路器小車,如圖1所示。
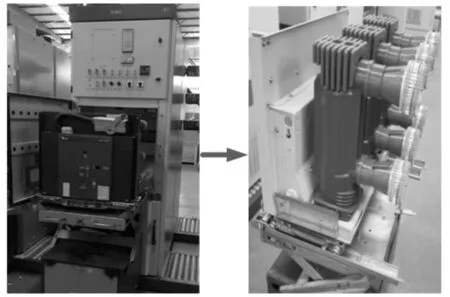
圖1 開關柜及其斷路器小車Fig.1 Switchgear and its Circuit Breaker
傳統的人工合格性檢測需要大量人力,面向開關柜的機器人質量檢驗系統展開研究,通過采集到的電機力矩信息判斷斷路器小車是否正常運行,進而判斷開關柜合格與否。該研究方案同樣適用于旋轉類零件裝配產品的合格性檢驗,當機器人檢測齒輪軸與軸承、絲杠與軸承等零部件裝配好后的產品出現質量缺陷時,力矩信號會發生突變,對該突變進行有效識別即可實現對產品質量的準確判斷。同時可避免在用機器人進行產品質量檢測過程中,由于未能及時識別到不合格產品并停機產生對機器人系統和產品的損傷。
對于信號奇異性特征的提取常用的方法有小波變換和智能檢測。小波變換因具有反應信號局部特征的特點,被認為是檢測信號變化最重要的工具[2]。文獻[3]首次將小波變換應用于信號的奇異性檢測,為檢測信號的奇異性分析奠定了理論基礎。由于小波變換存在著頻譜混疊、計算量大[4]、偏移缺陷[2]以及小波基的選擇困難[6]等一系列問題,學者們相繼從小波理論本身出發進行小波變換的改進。文獻[7]通過交換偶數位置節點—小波包分解后兩節點順序來消除頻帶錯位現象,引入兩個算子分別除去高、低頻子帶理想通帶范圍外的頻率成分以消除頻帶重疊現象。文獻[8]提出了一種基于二代小波變換和多級假設檢驗的信號變化點定位方法,只需要較少的樣本即可實現對信號變化點的快速定位。文獻[9]提出將相關法和小波變換模極大值法結合的聯合定位方法來減小定位誤差。上述研究方法雖然在一定程度上優化了小波理論,但是小波變換的偏移缺陷無法徹底消除,且計算過程復雜,將會導致系統無法準確及時的停機而造成產品的進一步損傷。
為進一步提高信號奇異性檢測的準確性和快速性,相關學者利用智能算法展開了一系列的研究工作。文獻[10]提出一種基于卷積神經網絡的檢測方法,利用卷積神經網絡模型直接從工作信號中學習用于檢測的有用信息,可以免去傳統方法中對原始信號數據進行人工預處理的過程,從而實現端到端的檢測,檢測準確率超過93%。文獻[11]提出一種基于長短期記憶網絡(LSTM)的低延遲檢測方法,具有較小的儲存空間占有率和較低的計算延遲。文獻[12]提出了一種基于堆棧稀疏自編碼器和Softmax的深度神經網絡的識別算法,堆棧稀疏自編碼器能夠有效地提取工作信號的高維特征,構建的深度神經網絡可有效地識別液壓泵泄漏狀態,識別精度達到97.6%。上述研究方法盡管在數據預處理、檢測精度等方面較小波理論有較大提升,但是需要大量的樣本數據進行模型訓練,極大地增加了前期工作時間成本。針對上述算法在實際應用中存在的問題,以開關柜為研究對象,提出一種基于力矩信號奇異性分析的檢驗算法。基于bayes的小波閾值降噪方法對、力矩信號進行降噪,將提取出的力矩信號奇異性特征通過Fisher判別法進行特征壓縮處理;然后將上述處理后的特征向量組成的訓練樣本輸入到支持向量機分類模型中進行訓練,得到能檢測產品合格性的分類模型;為驗證所提方法的正確性,面向開關柜的合格性檢驗,搭建了絲桿測試系統,通過實驗證明了所提算法的可行性和有效性。所提方法流程,如圖2所示。
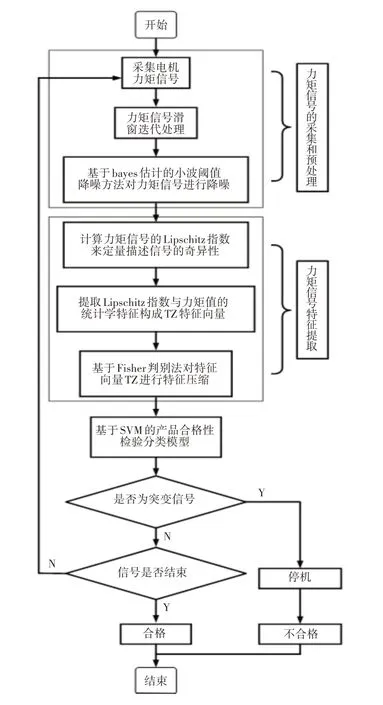
圖2 所提算法流程圖Fig.2 Flowchart of the Proposed Method
2 開關柜合格性檢驗機器人系統的力矩信號采集和預處理
2.1 開關柜合格性檢驗機器人系統的力矩信號采集
開關柜合格性檢驗機器人系統通過機器人本體末端的擴展第7軸對開關柜中絲桿進行旋擰測試。整個系統主要由機器人及其控制柜、工控機、擴展第7軸、工控機、驅動器等構成,如圖3所示。擴展第7軸是指在機器人本體末端擴展一個旋轉軸,該旋轉軸由電機和減速器組成。
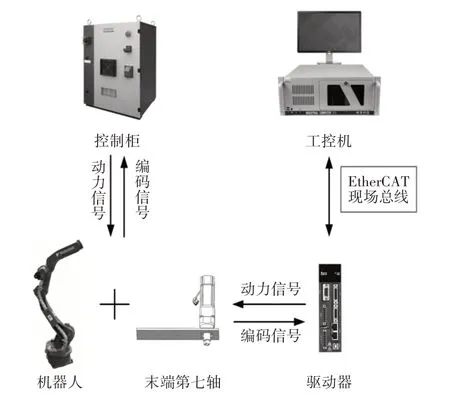
圖3 開關柜合格性檢驗機器人系統Fig.3 Robot System for Switchgear Conformity Inspection
在系統運行檢測過程中,第7軸旋擰絲桿輸出力矩,控制系統實時獲得力矩信號τ,通過分析該力矩信號是否發生突變即可得知斷路器小車是否正常運行,進而實現對開關柜合格性的判斷。關節力矩信號是基于EtherCAT現場總線來實時采集,使用裝載實時控制系統的工控機作為上位機進行控制,驅動器的位置由上位機計算并發送,采樣周期為1ms。檢測過程中,絲桿旋擰一端的受力方向,如圖4所示。
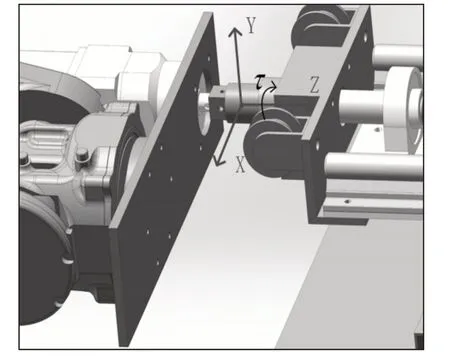
圖4 旋擰套筒受力圖Fig.4 Force Diagram of Sleeve
2.2 開關柜合格性檢驗機器人系統力矩信號的預處理與特征提取
2.2.1 力矩信號的滑窗迭代處理
直接對采集到的電機力矩信號進行分析時,會因為特征過于單一而無法達到理想的分類效果,因此采用滑窗迭代的方式對信號進行預處理,在增加信號特征的同時也能保證算法的實時性。滑窗迭代指在一個固定窗(窗寬為N)內添加新采樣的數據而剔除舊的數據,即每次窗口滑動,將最新采樣的數據放到窗口第N位,舊數據左移一位,第1位數據(最早的數據)剔除,原理圖,如圖5所示。第i個滑動窗(i)可以表示為:
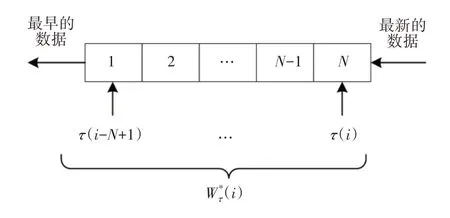
圖5 滑窗迭代原理圖Fig.5 Sliding-Window Iterative Schematic Diagram
式中:τ(i)—第i時刻所對應的力矩值,i=1,2,3,...。
2.2.2 力矩信號的小波閾值降噪處理
采集到的電機力矩信號含有一定的噪聲,會導致信號的奇異性減弱從而影響后續分類算法的效果,因此需要對采集到的力矩信號進行降噪處理。傳統的小波閾值降噪[13]中,閾值的設定都沒有考慮到原始信號小波系數的先驗信息,在此基于Bayes估計的方法來確定閾值,利用其考慮先驗信息的優勢來達到強力的降噪效果。小波閾值降噪過程中會產生邊界效應進而影響降噪效果,對滑窗(i)作對稱延拓處理得:
對Wτ(i)進行小波變換,得到小波系數j,kWτ(i),則含噪信號的方差為:
式中:j—尺度;k—時間。采集到的力矩信號由原始信號和噪聲組成,則噪聲的方差可估計為:
由式(4)、式(5)可得Bayes閾值:
基于軟閾值對小波系數進行過濾,則j,kWτ(i)為:
2.2.3 力矩信號的特征提取、壓縮
為了對斷路器小車運行狀態進行準確判斷,需要提取降噪后的力矩信號的有效信息。當斷路器小車運行遇到卡滯、碰撞時,其力矩信號會發生突變并伴隨奇異性的產生,基于該特點,選擇能夠定量描述奇異性的Lipschitz指數[14]以及力矩值的統計學特征作為分類特征。
(1)提取力矩信號特征
設降噪后的力矩信號窗Wτ(i)在i處的Lipschitz指數α≤n,則存在常數A使得,
對式(8)兩邊取對數,可得:
Wτ(i)在i處的Lipschitz 指數即為所求解出的作為j的函數的斜率。
提取滑窗i處的Lipschitz指數αi和力矩值Wτ(i)的統計學特征:最大值αmax、Wτmax,最小值αmin、Wτmin,平均值αmean、Wτmean,標準差αstd、Wτstd,峰度αkur、Wτkur,偏斜度αske、Wτske。將上述特征構成特征向量:
(2)壓縮力矩信號特征
特征向量TZ中存在相關性不高的元素,會增加機器學習模型的復雜性,導致過擬合和維數災難等問題。因此基于Fisher判別法[15]對特征進行壓縮處理,Fisher判別指數:
式中:n—特征元素序號;SBn—n個特征之間的離散度;SWn—特征內的離散度;M—特征的類別數量—類別Lp中特征n的均值和分別由下式計算,
式中:Lp—特征元素的第p個類別;x—類別Lp中的特征;lp—該類型中特征元素樣本的數量。將計算的Fisher判別指數按數值大小排序,取排名靠前的特征元素構成向量。
3 基于SVM的力矩信號特征分類
3.1 基于SVM的力矩信號特征分類原理
由前述方法提取力矩信號的特征后,組成樣本集:
每個樣本對應著一個標簽yi∈{-1,1},i=1,2,…,n,其中1,-1代表不同的樣本類別,樣本集和標簽集y共同組成訓練集。SVM算法在R2空間內定義最優超平面,最大化間隔進而實現分類的原理,如圖6所示。
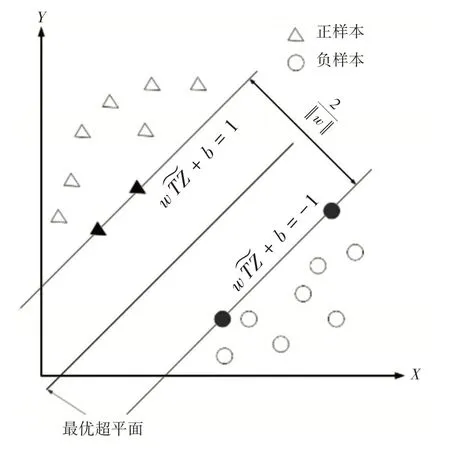
圖6 SVM分類原理示意圖Fig.6 Principle of SVM Classification
(1)特征向量線性可分設超平面方程為:
式中:w—超平面的法向量;b—超平面的位移項。若yi=+1,則有
使得式(16)等式成立的樣本點稱為支持向量,而兩個異類支持向量到超平面的距離之和稱為間隔γ。
尋找使得間隔最大的最優超平面,即尋找滿足式(16)約束的w和b,使得γ最大。
基于拉格朗日乘子法構造出目標函數,再通過序列最小優化(SMO)求解得到,并最終確定最優超平面為:
式中:w*—最優拉格朗日乘子求得的法向量;—任意支持向量。
(2)特征向量非線性可分
在非線性可分的條件下,為緩解過于嚴苛的間隔限制,可以通過構造軟間隔的方法來定義約束條件,即允許某些樣本不滿足約束式(16)。引入松弛變量ξi≥0,則目標函數可化為:
式中:C—常數參數,可調節軟間隔的作用程度。求解上式可得到非線性二分類SVM模型的超平面方程。
(3)特征向量不可分
采用非線性空間變換φ將樣本映射到高維空間,使其在高維空間實現線性可分。式(18)可化為:
同理可求得最優超平面,
3.2 基于SVM的力矩信號特征分類模型訓練
建立以力矩信號的特征向量為輸入,開關柜是否合格為輸出的SVM 模型,尋找最優超平面,最終得到合格性檢驗判斷模型,訓練該模型的算法流程,如圖7所示。
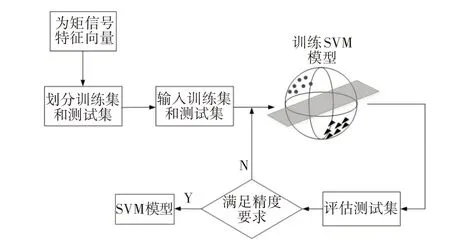
圖7 SVM模型訓練流程圖Fig.7 Flow Chart of SVM Model Training
(1)采集數據樣本:為保證實驗數據的準確性,在實驗過程中采用相同的起止點、運行時間、采樣頻率,采集含突變信號和平穩信號各10組。
(2)提取信號窗口特征:將信號窗口所對應的特征向量作為SVM分類模型的輸入。
(3)編寫樣本標簽:將正、負樣本標簽分別記為1和-1。
(4)引入核函數:提取的力矩信號的有效特征屬于特征向量不可分,而高斯核函數可以把低維數據映射到高維數據,適用于線性不可分的復雜情況,因此,我們引入高斯核函數作為分類模型分離特征的方法。
(5)訓練SVM 分類模型:通過提取7組力矩信號的特征,串聯形成的訓練集特征,同時串聯形成的訓練集標簽。將訓練集的特征以及相應標簽作為SVM模型的輸入,通過訓練可得到所需要的SVM分類模型。
(6)驗證測試集精度:為驗證SVM分類模型的分類效果,將驗證集特征和驗證集標簽輸入到模型中,輸出相應的預測標簽,通過對比預測標簽和驗證集標簽,計算出SVM分類模型的精度。
3.3 基于訓練后SVM模型的開關柜合格性檢驗
將樣本輸入至該模型,當識別為正樣本即正常信號時,算法繼續;當識別為負樣本即異常信號時,產品不合格,如圖8所示。信號結束時,所識別樣本均為正樣本,則產品合格。
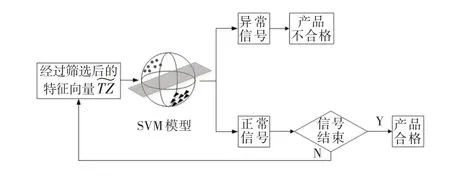
圖8 基于SVM分類模型的開關柜合格性檢測Fig.8 Switchgear Conformity Inspection Based on SVM Classification Model
4 開關柜質量檢驗實驗及分析
4.1 質量檢驗實驗平臺
為了驗證所提出的基于力矩信號奇異性分析的開關柜合格性檢驗算法的有效性和魯棒性,在本節分別進行了無阻尼干擾檢測實驗、阻尼干擾下的力矩奇異性特征分析算法與小波理論算法對比檢測實驗。以供電局變電站內使用的開關柜產品質量檢驗為研究背景,開關柜中斷路器小車在旋轉手柄將斷路器旋進工作狀態時,如果出現卡阻、碰撞即判斷為產品不合格。作者將該小車的絲桿系統拆卸下來模擬搭建了測試實驗平臺,該平臺的旋轉操作由安川機器人MH24完成,如圖9所示。由斷路器控制制動器的啟停,從而提供隨機制動力矩,由制動力矩所產生的突變信號視為異常信號即產品不合格。
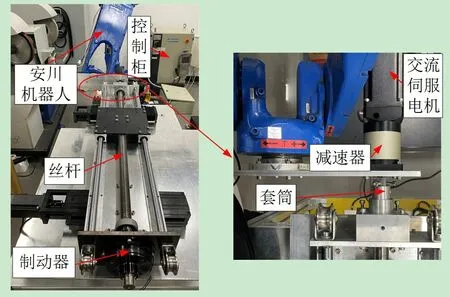
圖9 實驗平臺及控制系統Fig.9 Experimental Platform and Control System
4.2 基于所提算法訓練質量檢驗模型
采集電機輸出力矩信號,如圖10所示。由于電機在啟停時會有一個短暫的加速過程,圖中A處力矩發生突變,該突變會引起整體統計信息的異常,因此須在此處對統計參數進行初始化,即在啟停瞬間無法進行檢測,時長約為200ms。對電機輸出力矩信號進行頻譜分析,如圖11(a)~圖11(b)所示。
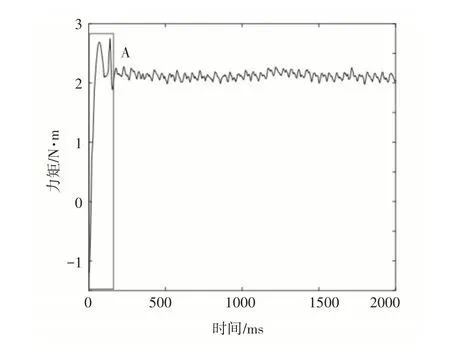
圖10 無阻尼干擾時電機輸出力矩曲線Fig.10 Motor Output Torque Curve without Damping Interference
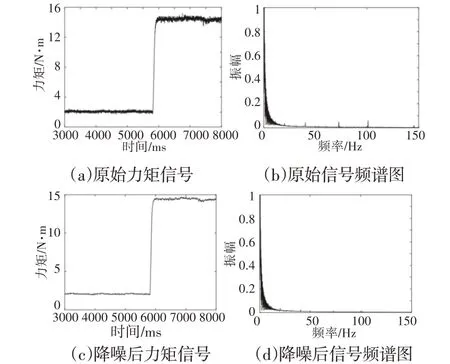
圖11 降噪前后力矩信號的頻率分布Fig.11 Frequency Distribution of Torque Signal Before and After Denoising
有用信號集中在低頻50Hz 以下,因此,對力矩信號進行4層小波分解,并基于2.2.2節所述的小波閾值降噪算法對力矩信號進行降噪處理,降噪后的力矩信號及頻譜如圖11(c)~圖11(d)所示。利用式(9)計算窗口的Lipschitz指數,提取力矩信號的相關數學特征構成式(10)的向量形式。如圖12(b)所示,將信號分離的起始位置P視為突變起始位置,以該位置為突變起點將突變區域等分為三個區域A、B、C三個區域并繪制,如圖12(a)所示。由區域A 到B、C 算法的魯棒性逐漸減弱,但是響應速度隨之加快,為同時兼顧算法的響應速度和魯棒性,設定B區域為突變識別的安全區域。因此,將含有B區域數據時的窗口作為負樣本,其它部分作為正樣本。

圖12 力矩信號突變處分區圖Fig.12 Partition of Torque Signal Mutation
利用2.2.3節中所述Fisher判別法對所選特征按判別指數大小進行排序,排序結果,如表1所示。根據表1的結果,選擇奇異性指數的峰度kurα、最大值maxα以及力矩值得最大值maxWτ、最小值maxWτ、平均值meanWτ作為機器學習模型訓練的征,得到新的特征向量為:
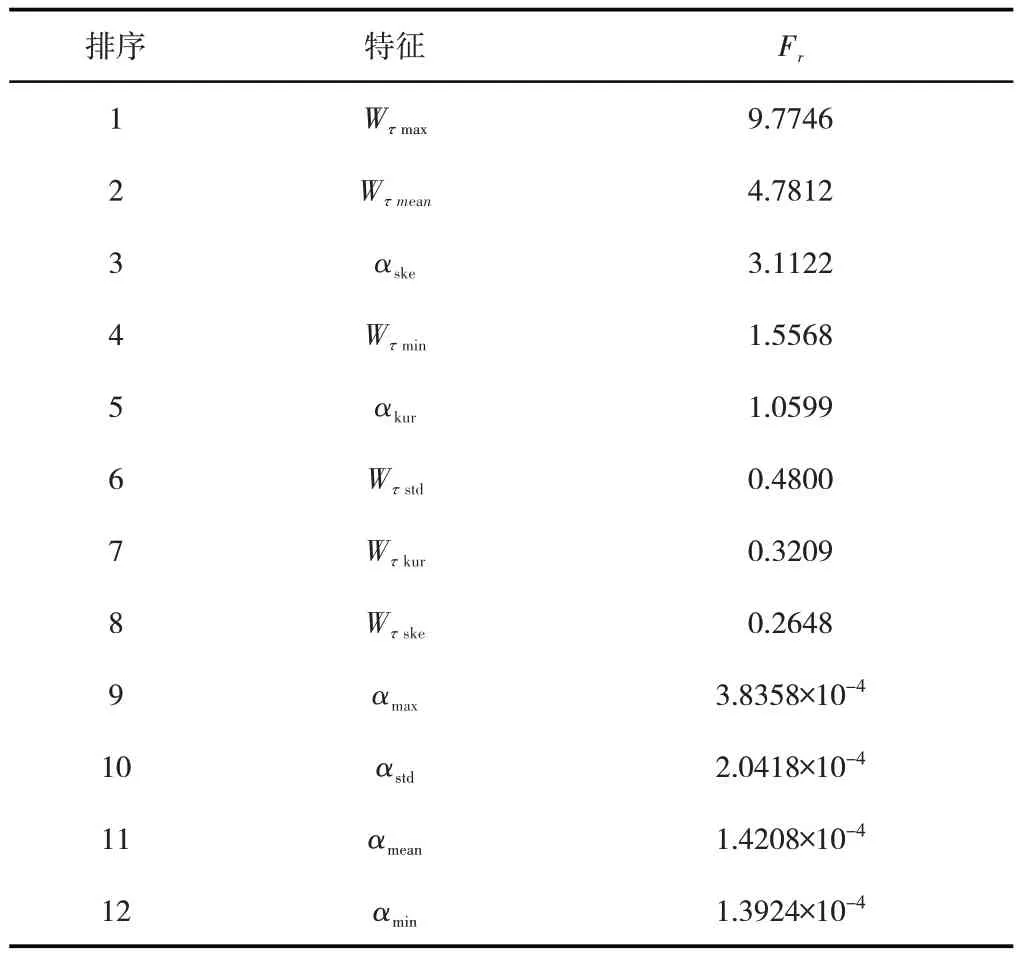
表1 力矩信號特征的Fisher分數排序Tab.1 Fisher Fraction Ordering of Torque Signal Features
基于第3節中所述的SVM分類算法對篩選后的力矩信號特征進行訓練,得到產品質量檢測模型。7次實驗所得ni值,如表2所示。經過測試,得到SVM分類驗證集的精度為99.97%。

表2 ni值Tab.2 Value of ni
4.3 無阻尼干擾檢測
(1)開關柜合格性檢驗機器人系統運行時,不啟動制動器,得到電機輸出力矩曲線,如圖13所示。算法未識別到信號異常,產品質量合格,識別正確。
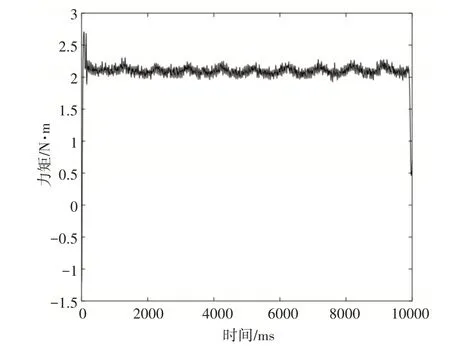
圖13 無突變檢測Fig.13 No Mutation Detection
(2)開關柜合格性檢驗機器人系統運行時,隨機開啟制動器,得到電機輸出力矩曲線,如圖14 所示。實際突變起始處為6110ms,識別位置為6137ms,延遲為27ms,設定識別區域為6137ms~6163ms,滿足要求,判定產品質量不合格,識別正確。為保證算法的可靠性,分別連續進行20次無阻尼干擾下的無突變檢測,均未發出警報、誤報率為0%。同樣的,突變檢測時,算法均能在27ms后30ms內發出警報,識別點均在設定區域內,準確率達100%。
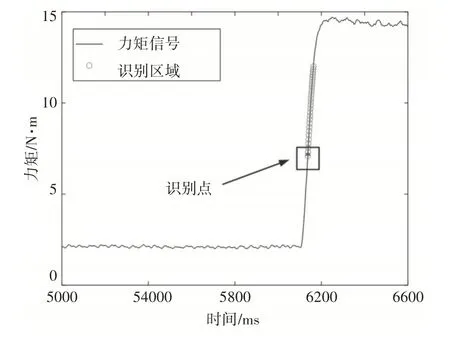
圖14 隨機突變檢測Fig.14 Random Mutation Detection
4.4 阻尼干擾下檢測
(1)開關柜合格性檢驗機器人系統運行時,隨機增加阻尼干擾,不啟動制動器。如圖15(a)所示。力矩奇異性特征分析算法未識別到信號異常,產品質量合格,識別正確;小波理論算法識別到信號異常,產品質量不合格,識別錯誤,如圖15(b)所示。

圖15 阻尼干擾下無突變檢測Fig.15 Damping Interference No Mutation Detection
(2)開關柜合格性檢驗機器人系統運行時,隨機增加阻尼干擾,隨機啟動制動器,如圖16(a)所示。實際突變起始處為6650ms,識別位置為6677ms,延遲為27ms,設定識別區域為(6677~6703)ms,滿足要求,判定產品質量不合格,識別正確;如圖16(b)所示,受阻尼干擾影響,小波理論算法未能有效檢測突變區域,識別錯誤。在阻尼干擾下,小波理論無法準確的分辨出干擾信號和突變信號,相比之下,力矩奇異性特征分析算法依然能準確的識別出突變處,其保證快速性的同時,魯棒性更強。
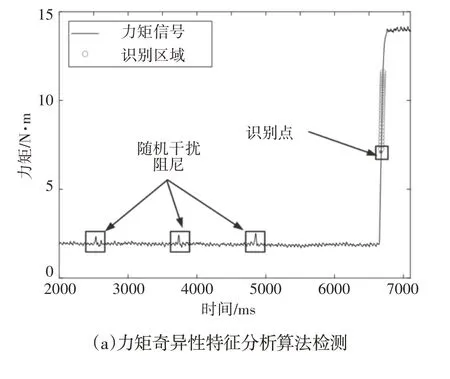
圖16 阻尼干擾下突變檢測Fig.16 Damping Interference Mutation Detection
5 結束語
(1)為改善人工對開關柜合格性檢驗需要大量人力且效率低、準確性差的缺陷,提出基于機器人的合格性檢驗方案。該方案使用機器人對開關柜中絲桿作旋轉檢驗,通過采集機器人末端第七軸的電機力矩信息,基于對該力矩信息的分析結果來判斷斷路器小車是否正常運行進而判斷開關柜合格與否。在檢驗過程中,為系統能夠及時識別異常信號并迅速停機,減少對系統和產品的損傷,提出一種基于力矩信號奇異性分析的檢驗算法。該算法基于產品的合格性與機器人第7軸上電機力矩信號的奇異性特征的相關性,采用滑窗迭代處理增加力矩信號特征元素,基于Fisher 判別法篩選出有效的力矩信號特征,并將該特征輸入到SVM分類器中訓練出產品合格性分類模型,利用該模型即可實現對產品合格性的判別。(2)為驗證力矩信號奇異性分析算法的可行性,搭建了檢測實驗平臺,設計了兩組實驗:無阻尼干擾檢測和阻尼干擾下檢測。實驗結果表明,利用該算法進行無突變檢測時,未產生誤報,準確率達100%;進行突變檢測時,識別率達100%,延遲均在(27~30)ms,所識別位置均落在設定區域內。
在隨機阻尼干擾下,小波理論算法無法有效區分干擾和突變信號,導致產生誤報,而所提算法依然能有效進行區分。較小波理論算法而言,所提算法在保證檢測準確性的同時,魯棒性有明顯的提高。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
電子制作(2018年11期)2018-08-04 03:25:42
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12
