動量環式主動增穩加油錐套建模與飄擺抑制
2024-05-09 10:16:42朱喆黃江濤章勝李飛杜昕單恩光唐驥罡王春陽
航空學報 2024年7期
關鍵詞:方向
朱喆,黃江濤,章勝,李飛,杜昕,單恩光,唐驥罡,王春陽
中國空氣動力研究與發展中心 空天技術研究所,綿陽 621000
在大氣紊流、加油機尾流、翼尖渦流、受油機頭波等干擾下,空中加油軟管-錐套組合體產生非定常、非線性、快時變、強耦合飄擺運動,對空中加油高精度對接和飛行安全帶來不利影響[1-2]。因此,準確建模模擬軟管-錐套動態特性,并發展相應的錐套飄擺抑制方法對提高空中加油效能具有重要意義。
為模擬軟管-錐套動態特性,國內外提出了多種建模方法。Ro等[3-4]利用多體動力學理論來對加油軟管錐套系統建模,基于有限元分析法將軟管錐套近似為多級串聯的球桿模型,建模方法直觀簡單。文獻 [5-7]通過擴展Hamition 原理建立了變長度軟管-錐套模型并開展仿真分析。Dai等[8]通過系統辨識得到了變長度軟管-錐套動力學模型。李明哲等[9]基于絕對節點坐標法建立了軟管-錐套多體動力學模型,進一步提高了計算效率。王海濤等[10-11]基于集中參數法建立了多級串聯單擺系軟管-錐套運動模型,并對軟管收放、外部擾動和甩鞭現象等特性進行了研究。針對本文研究提出的自旋動量環式主動增穩加油錐套方案,上述建模方法難以對動量環轉動時產生的動量矩進行表征,需要針對性開展建模研究。
軟管-錐套空中飄擺運動抑制方面,目前對軟管-錐套空中飄擺運動抑制的研究主要集中于翼舵式主動增穩控制方案。García-Fogeda等[12]通過在軟管與錐管連接處添加翼舵控制面,改善了軟管錐管系統的動態特性。張進等[13-14]基于十字舵面式錐套方案進行飄擺抑制控制器設計,有效減小了軟管-錐套在大氣紊流中的波動幅度。孟中杰等[15]設計了一種舵面式自主空中加油試驗錐套,用來進行軟式空中加油風洞試驗驗證。吳玲等[16-17]開展了基于比例積分微分和線性二次調節器的翼舵式軟管錐套主動控制策略研究。翼舵式主動增穩錐套方案存在控制邏輯直觀、飄擺抑制明顯等優勢,但其在回收過程中存在與加油機吊艙口撞擊的風險,對于不同尺寸的加油吊艙適用性較差,同時對隱身性能產生一定程度的破壞。
本文提出一種自旋動量環式主動增穩錐套方案,通過在錐套錐杯處集成2 個具有偏置角度的主動控制動量環實現飄擺抑制,通過動量環轉動產生動量矩進行增穩控制,克服傳統翼舵式主動增穩錐套舵面與吊艙口撞擊風險,以及吊艙/錐套錐杯尺寸約束下可折疊式翼舵結構復雜等問題。對動量環轉動時產生的動量矩進行表征,基于拉格朗日方程開展針對性建模研究,建立考慮動量環旋轉的多級串聯單擺系空中加油軟管-錐套飄擺運動模型,對比分析加油機洗流場內模型的準確性。分析陣風及大氣紊流干擾下軟管-錐套的飄擺運動特性。提出基于動量環控制的錐套飄擺抑制控制方法并開展仿真研究。
1 自旋動量環式主動增穩錐套設計
設計一種自旋動量環式主動增穩空中加油錐套方案,其原理是在錐套錐杯處集成主動控制動量環,通過直流電機控制動量環的轉速及旋轉方向,利用動量環產生的動量矩及進動效應對錐套飄擺進行抑制。雖然單動量環方案結構更為精簡,但是前期研究表明由于該種方案的欠驅動特性影響,難以同時對錐套縱向及側向飄擺運動進行有效抑制。因此,本文進一步提出雙偏置動量環方案,即在錐套錐杯處集成2 個具有偏置角度的主動控制動量環實現飄擺抑制。2 個偏置動量環均與錐杯橫截平面成一定平面角布置,從而增強了對錐套飄擺運動的抑制能力。錐杯內布置D-GPS(Differential Global Position System,差分全球定位系統)傳感器,實時測定錐套運動位置及速度,如圖1 所示。自旋動量環式方案相對于傳統翼舵式主動增穩錐套(見圖2),結構更加緊湊,釋放回收過程安全性更高,隱身性能更好。
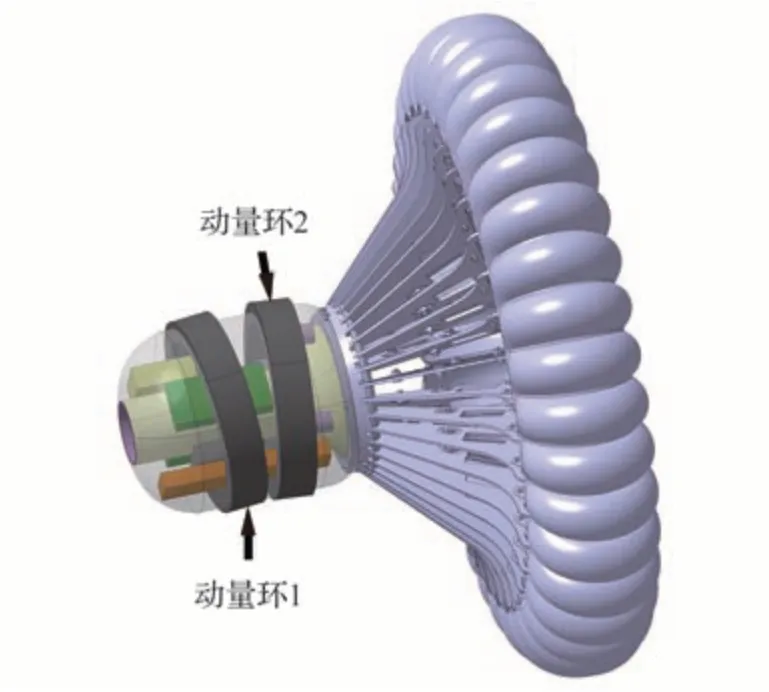
圖1 自旋動量環式主動增穩錐套Fig.1 Actively stabilized drogue with momentum rings

圖2 傳統翼舵式主動增穩錐套Fig.2 Traditional actively stabilized drogue with rudders
2 軟管-錐套組合體建模
2.1 建模假設及坐標系定義
基于拉格朗日方程,建立考慮動量環轉動的多級串聯單擺系軟管-錐套運動模型,并作出如下假設:
1)加油機在地面系下做定直勻速平飛。
2)模型抽象為逐級串聯單擺系,各段軟管與相應擺桿長度相同,質量和外力均集中于球形鉸鏈。
3)模型不計軟管扭轉與彈性,軟管長度不變。
4)軟管-錐套系統承受重力、自由來流、大氣擾動形成的空氣阻力。
5)不考慮加油機姿態變化影響,拖曳點系相對于地平系無轉動。
6)錐套軸向平行于自由來流方向。
坐標系O0-X0Y0Z0為加油機拖曳點坐標系,其中,X0為加油機地速方向,Z0為加油機重力方向,Y0、Z0由右手定則得到。坐標 系O0-XYZ 為重力與無風條件下自由來流阻力合力場下的等效慣性坐標系,其中,X 為重力與無風條件下自由來流阻力的合力負方向,與加油機拖曳點坐標系X0夾角為γ,Y 與Y0一致,Z 方向由 右手定則 得到,與Z0夾角為γ。錐套與加油機拖曳點之間通過軟管連接,軟管長度為l,如果軟管由n 級擺桿組成,第k 級擺桿質量為ml,錐套位于末級擺桿鉸鏈,質量為md。第k 級擺桿鉸鏈在等效慣性系O0-XYZ 中的空間坐標可通過其相對O0XZ、O0XY 平面的 偏轉角θk1、θk2加以描述,如 圖3 所示。錐套即第n 級擺桿鉸鏈在等效慣性系O0-XYZ 中的空間坐標,可通過其相對XO0Z、XO0Y平面的偏 轉角θn1、θn2加以描述,如圖4 所示。錐套錐杯處集成了2 個偏置動量環W1、W2,與YZ 平面的安裝角分別為χ、-χ,與XY 平面安裝角均 為0°,旋轉角 速率分別為,如 圖5所示。
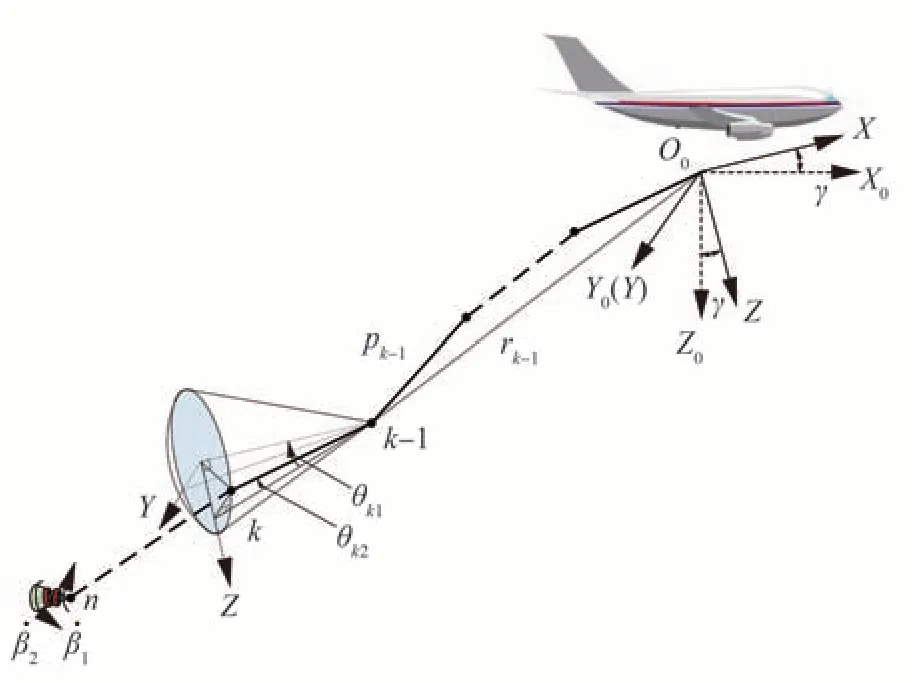
圖3 軟管-錐套系統模型Fig.3 Hose-drogue model
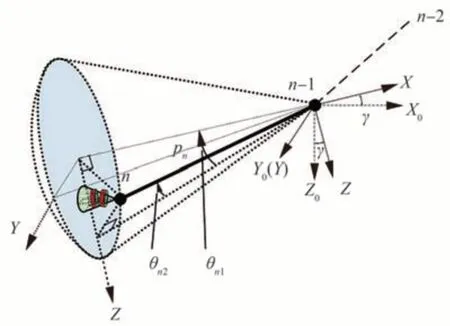
圖4 錐套擺動模型Fig.4 Drogue pendulous motion model
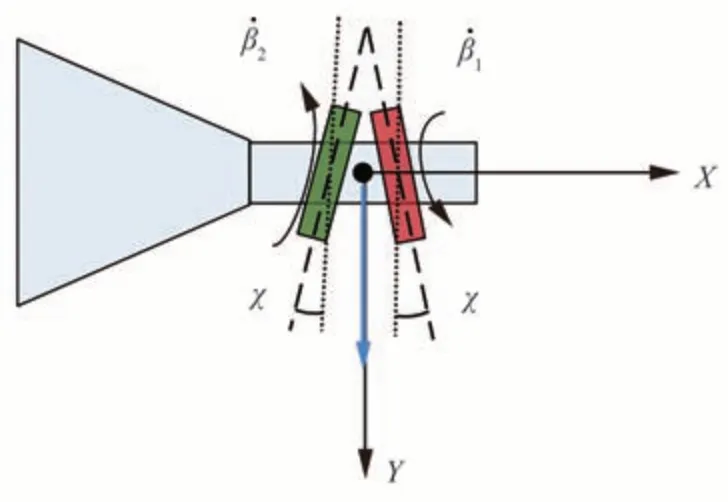
圖5 動量環布置Fig.5 Momentum rings arrangement
2.2 軟管-錐套系統建模
令鉸鏈k 的空間位置矢量為rk,則rk在慣性系O0-XYZ 中可表示為
式中:pk為鉸鏈k-1 指向鉸鏈k 的距離矢量;pk在慣性系O0-XYZ 中的坐標為
對式(1)求導,得到鉸鏈k 的運動速度vk為
由式(3)可得
不考慮加油機姿態變化影響,對式(2)求一次、二次導數得到分別為
式中:pk,θki為pk關于θki的偏導數為θki的一階導數為θki的二階導數。
令鉸鏈k 在慣性系O0-XYZ 中繞O0轉動的角速度為ωk,則
則錐套和動量環在慣性系O0-XYZ 中繞O0轉動的角速度ωD、ωW1、ωW2分別為
建立拉格朗日方程:
系統總動能由系統各質點平動動能TE,錐套轉動動能TD,動量環轉動動能TW1、TW2組成,即
考慮錐套在其體系下的轉動慣量為IDB,兩動量環在各自體系下的轉動慣量分別為IWB1、IWB2,錐套體系至等效慣性系的旋轉矩陣為SIB,動量環1、2 各自體系至等效慣性系的旋轉矩陣分別為SIB1、SIB2,則錐套和動量輪在慣性系O0-XYZ 中下的轉動慣量ID、IW1、IW2分別為
考慮將重力、自由來流以及大氣擾動形成的空氣阻力作為廣義力,則系統具有的勢能V=0。
根據拉格朗日函數得
分別取各級擺桿的擺角θk1、θk2,以及動量環轉動角度β1、β2作為系統的廣義坐標,坐標維數共計2n+2。
1)對于坐標qk1=θk1,θk1對應的廣義力為
式中:Fi為重力Fgi及空氣阻力Fdi在慣性系O0-XYZ 中的合力。
由式(9)可得
當k=1,2,…,n-1時,拉格朗日方程中TE關于θk1的偏導數及相關導數項具體形式為
拉格朗日方程中TD關于θk1的偏導數及相關導數項具體形式為
拉格朗日方程中TW關于θk1的偏導數及相關導數項具體形式為
當k=n時,拉格朗日方程中TE關于θn1的偏導數及相關導數項具體形式為
拉格朗日方程中TD關于θn1的偏導數及相關導數項具體形式為
拉格朗日方程中TW關于θn1的偏導數及相關導數項具體形式為
根據式(15)、式(17)~式(22)可得,當k=1,2,…,n-1時,鉸鏈k關于θk1坐標的動力學方程為
當k=n時,加油錐套關于θn1坐標的動力學方程為
2)對于坐標qk2=θk2,θk2對應廣義力為
根據式(9)~式(11)、式(14)可得,當k=1,2,…,n-1時,鉸鏈k關于坐標θk2的動力學方程為
當k=n時,加油錐套關于坐標θn2的動力學方程為
3)對于坐標qj=βj,令動量輪轉矩為τ,則β對應的廣義力為
參考文獻[18-19],考慮直流電機傳動比為a∶1,令電機的轉矩常數為Km,電機的電動勢常數為Ke,電機的電阻為R,則β 對應的廣義力為
根據式(9),拉格朗日方程中L 關于βj的偏導數及相關導數項具體形式為
根據式(9)~式(11)、式(31)、式(32)可得,加油錐套關于坐標βj的動力學方程為
根據式(23)、式(24)、式(27)、式(28)、式(33)可得到錐套-軟管組合體在球坐標系下飄擺運動方程,并可將方程表示為
3 干擾條件下錐套飄擺抑制
加油錐套受前機尾流、陣風、大氣紊流等擾動影響產生的隨機飄擺,擾動氣動力作用于錐套繞拖曳點O0轉動所產生的動量矩為MD,其可沿等效慣性系O0-XYZ 下沿O0Y 軸和O0Z 軸分解為MDY、MDZ。兩動量環分別繞錐套旋轉,產生的動量矩為MW1、MW2,可在XY、XZ 平面內分解為MWXY1、MWXY2、MWXZ1、MWXZ2。在XY 平面內,調整錐套轉速及方向,可使MWXY1與MWXY2合動量矩具有抵抗MDY的分量MWY;在XZ 平面內,調整錐套轉速及方向,可使MWXZ1與MWXZ2合動量矩產生抵抗MDZ的分量MWZ,如圖6、圖7 所示。
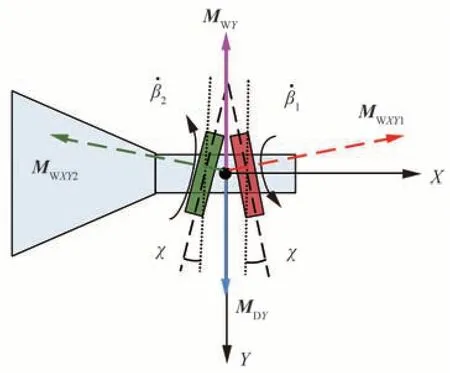
圖6 XY 平面內錐套飄擺抑制Fig.6 Pendulous suppression of drogue in XY plane
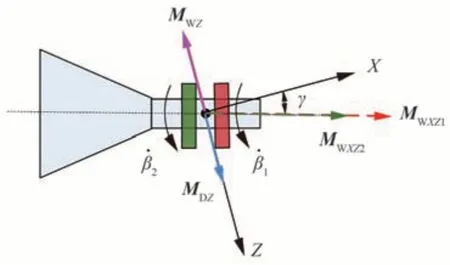
圖7 XZ 平面內錐套飄擺抑制Fig.7 Pendulous suppression of drogue in XZ plane
綜合考量系統響應特性及工程應用實際,擬采用位于加油錐套錐杯內部的D-GPS 傳感器實時測定錐套位置及速度,通過錐杯內直流電機控制動量環的轉速及方向,調整動量輪產生的動量矩大小及方向,實現錐套飄擺運動抑制,控制框圖如圖8 所示。
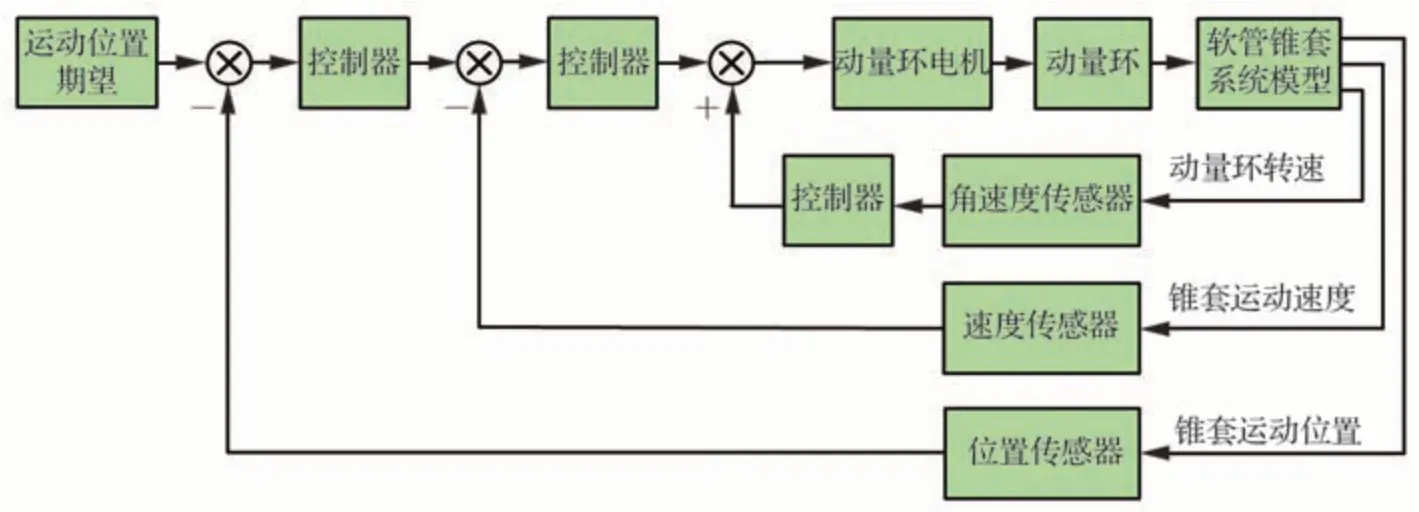
圖8 錐套飄擺抑制控制框圖Fig.8 Pendulous suppression control block diagram
控制系統輸入狀態量為錐套在等效慣性系下橫向飄擺位置XDY、縱向飄擺位置XDZ、橫向飄擺速度VDY、縱向飄擺速度VDZ,以及動量環旋轉速率。XDY、XDZ、VDY、VDZ由D-GPS 數據及坐標系轉換矩 陣SBI確定由旋轉 速率傳 感器得到,錐套穩定狀態下位置XDYcmd、XDZcmd由無干擾條件下軟管-錐套模型仿真及飛行測試實際確定。
采用PID 方法進行控制律設計,控制律包括位置誤差比例項、速度阻尼項,側向通道控制力δY和縱向通道控制力δZ可表示為
式中:kpxy、kpxz分別為側向、縱向位置比例控制增益;kpvy、kpvz分別為側向、縱向速度阻尼增益。
為實現側向、縱向控制力δY、δZ,需要進一步將其轉化為電機電壓控指令u1、u2,根據工程實際限制,電壓指令限幅為±60 V。由圖6、圖7 可知,當兩動量環同向旋轉時,將產生抑制錐套側向飄擺的動量矩MWZ;當兩動量環反向旋轉時,將產生抑制錐套縱向飄擺的動量矩MWY。因此,實現錐套縱向飄擺抑制時,兩動量環伺服機構產生的控制力矩相反,實現錐套側向飄擺抑制時,兩動量環伺服機構產生的控制力矩相同,故在電壓生成指令中縱向控制力反饋采用不同符號,側向控制力反饋采用相同符號。同時,控制指令中考慮引入動量環角速度阻尼項,以達到改善控制效果的目的。綜上,控制系統輸出量即電機電壓指令u1、u2為
4 仿真驗證及分析
4.1 仿真環境建立及模型準確性驗證
令加油軟管長度10 m、加油錐套直徑0.45 m,加油錐套質量7 kg,兩動量環在體軸系下的轉動慣量均為IWBxx=0.035 kg ?m2、IWByy=0.009 kg ?m2、IWBzz=0.009 kg ?m2,動量環安裝角χ=20°。加油機飛行高度1 km、飛行速度85 m/s,拖拽點位于加油機腹正下方,基于文中軟管-錐套運動模型建立仿真環境,如圖9所示。
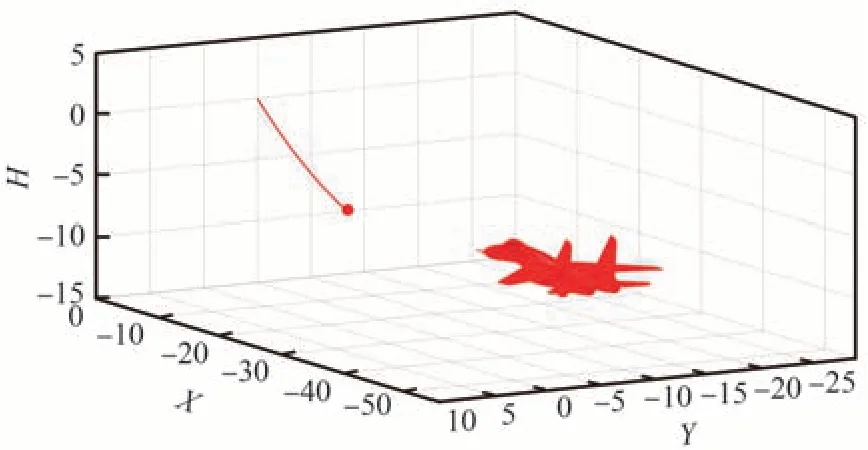
圖9 加油錐套飄擺運動仿真Fig.9 Pendulous motion simulation of drogue
根據文獻[20],采用基于畢奧-薩伐爾定律、修正后的亥姆霍茲馬蹄渦模型建立前機洗流場,與漩渦中心線距離為r 的風速大小表示為
式中:Γ 為渦旋強度;rc為渦核半徑;v 為黏度參數;τ 為渦齡。
分別開展無控狀態下基于拉格朗日方程的加油錐套飄擺運動仿真、基于集中參數法[10]的加油錐套飄擺運動仿真,YZ 平面內錐套飄擺軌跡如圖10 所示,錐套飄擺直角坐標、極坐標對比如圖11、圖12 所示。可以看出,基于2 種方法建立的軟管錐套飄擺運動軌跡一致,進一步對比驗證了方法的準確性。
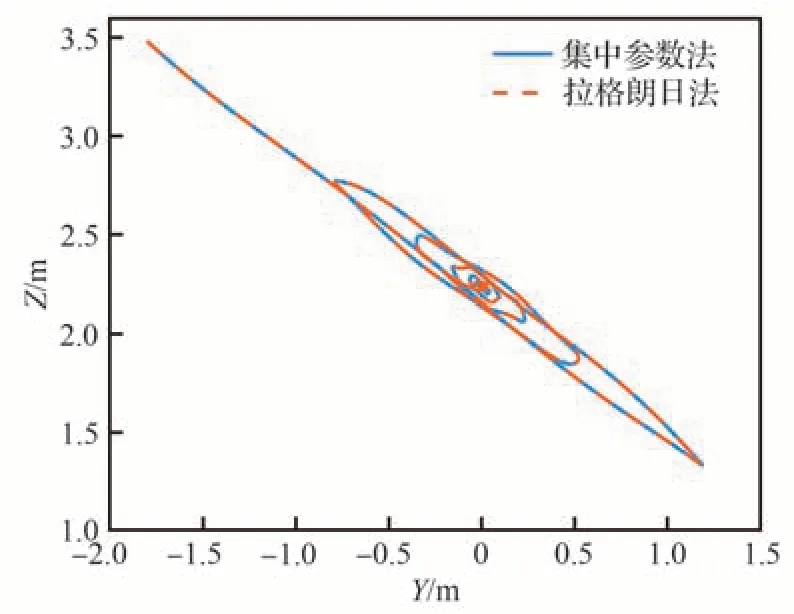
圖10 錐套飄擺軌跡對比Fig.10 Comparison of drogue motion track
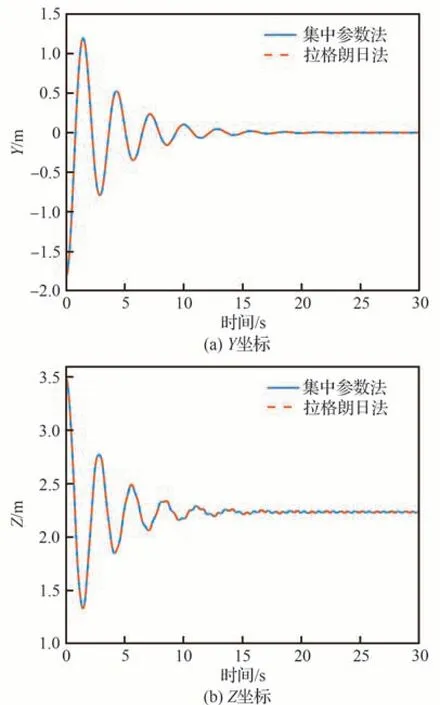
圖11 錐套直角坐標對比Fig.11 Comparison of drogue rectangular coordinate
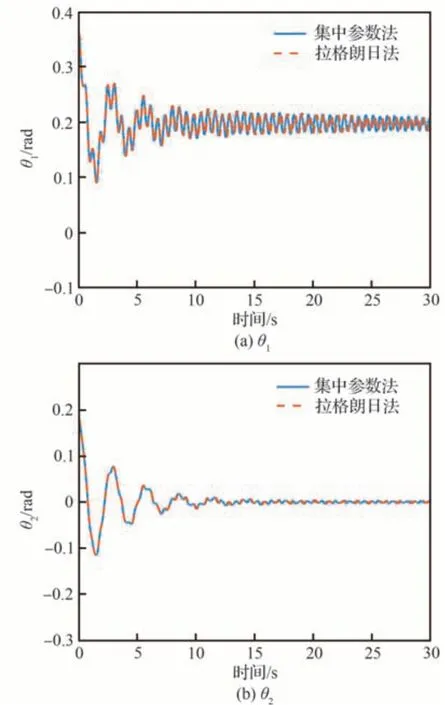
圖12 錐套極坐標對比Fig.12 Comparison of drogue polar coordinate
4.2 陣風干擾下飄擺抑制仿真
空中加油對接過程中,陣風擾動將對錐套穩態位置帶來極大影響。為對陣風擾動條件下,錐套飄擺及增穩情況進行分析,在Y、Z 方向上分別添加陣風干擾,陣風強度為6 m/s,陣風干擾時間為0.5 s。開展無控狀態下和增穩狀態下錐套飄擺運動仿真,錐套飄擺軌跡如圖13 所示。
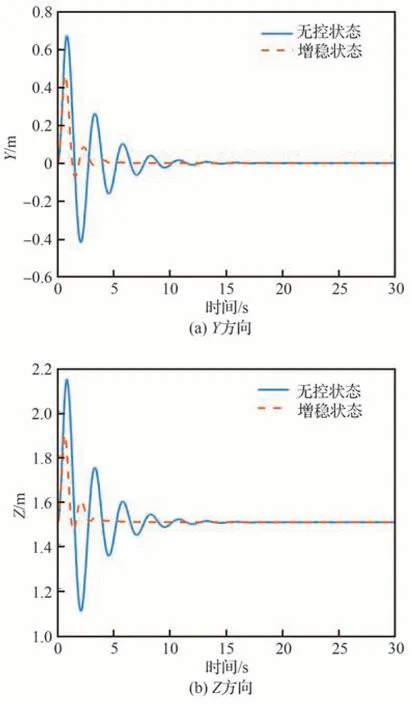
圖13 陣風干擾下錐套Y、Z 方向無控/增穩運動軌跡對比Fig.13 Comparison of drogue Y,Z motion track with control/non-control under gust interference
可以看出,在陣風干擾下,加油錐套將產生周期飄擺運動。無控狀態下,Y 方向上擺動幅度最大為0.68 m,Z 方向上擺動幅度最大為0.67 m,錐套受到干擾后16 s 收斂至平衡狀態;增穩狀態下,Y方向上擺動幅度最大為0.47 m,Z 方向上擺動幅度最大為0.40 m,干擾后5 s 收斂至平衡狀態,錐套飄擺運動得到快速抑制。
4.3 大氣紊流干擾下飄擺抑制仿真
大氣紊流將使錐套飄擺運動呈現出非定常、非線性、快時變、強耦合的系統特征。大氣紊流形成原因復雜,如地形誘導、風切邊、熱交換等,本文采用Dryden 模型[21]仿真不同速度下大氣紊流對軟管-錐套運動的影響,其縱向與橫向頻譜函數表達式為
式中:Ω 為空間頻率;Lu、Lv、Lw為大氣紊流尺度;σu、σv、σw為大氣紊流強度。
添加Dryden 模型模擬風場干擾,分別開展無控和增穩狀態加油錐套飄擺運動仿真,Y、Z 方向上錐套飄擺軌跡如圖14 所示,動量環轉速如圖15所示,動量環電機電壓如圖16 所示,根據工程實際限制,電機電壓限幅為±60 V。
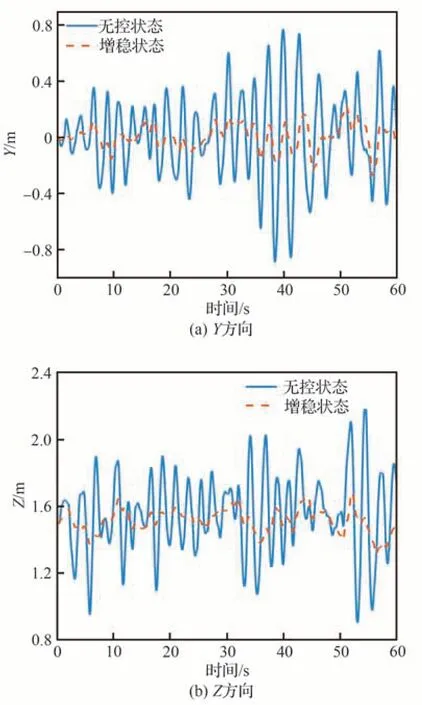
圖14 紊流干擾下錐套Y、Z 方向無控/增穩運動軌跡對比Fig.14 Comparison of drogue Y,Z motion track with control/non-control under turbulence interference
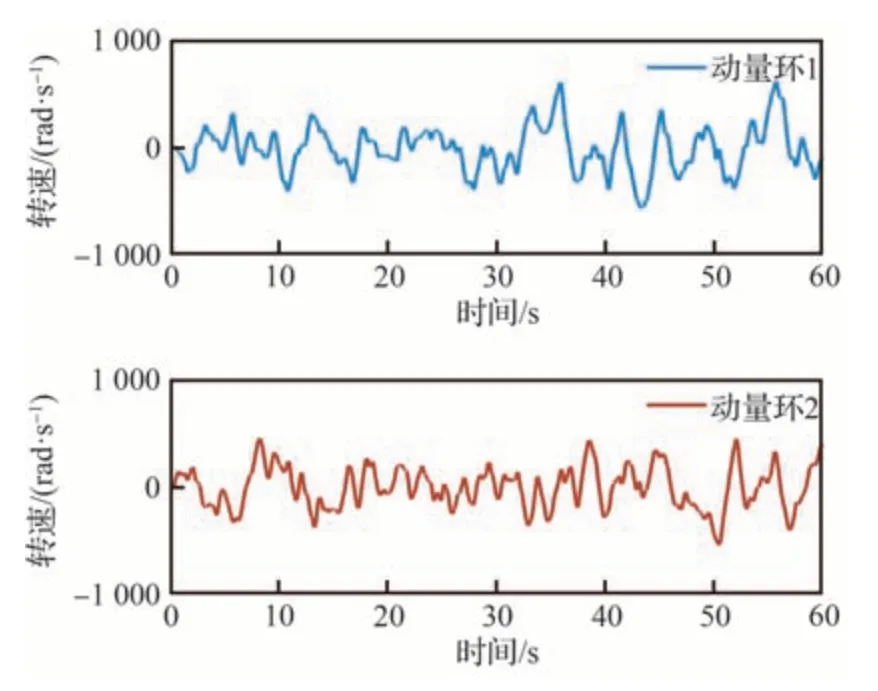
圖15 動量環轉速Fig.15 Rotation rate of momentum rings
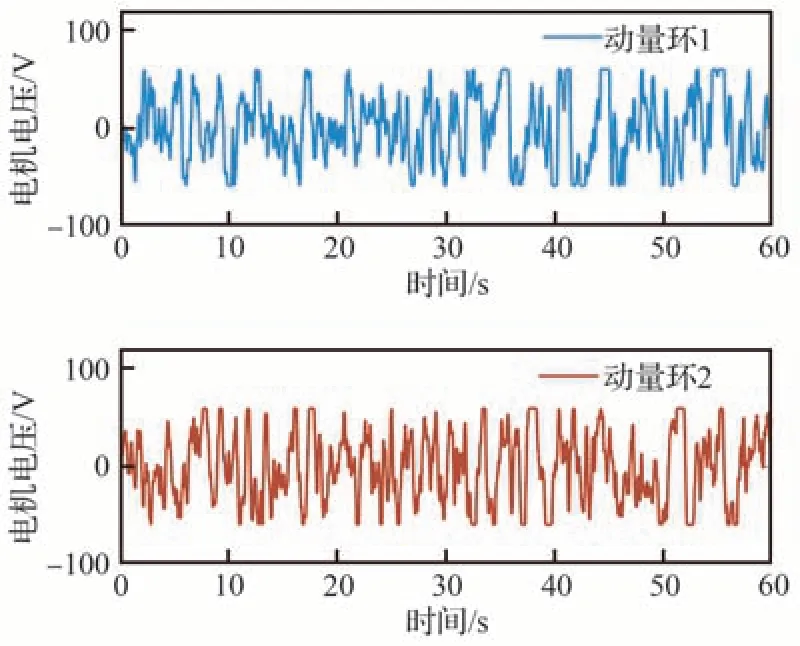
圖16 動量環電機電壓Fig.16 Motor voltage of momentum rings
可以看出,在大氣紊流的干擾下加油錐套將產生隨機飄擺運動,無控狀態下,Y 方向上最大擺動幅度大小為0.89 m,平均飄擺幅度大小為0.23 m;Z 方向上最大擺動幅度大小為0.73 m,平均飄擺幅度大小為0.18 m。開啟增穩模式后,Y方向上最大擺動幅度大小為0.27 m,平均飄擺幅度大小為0.07 m;Z 方向上最大擺動幅度大小為0.18 m,平均飄擺幅度大小為0.06 m。增穩狀態下,Y 方向上平均擺動幅度降低了69.57%,Z 方向上平均擺動幅度降低了66.67%,錐套飄擺幅度得到明顯抑制。
錐套在紊流干擾下的高頻抖振給空中加油精確對接帶來了慢動態追蹤快動態問題,進一步對無控/增穩狀態下錐套飄擺運動數據開展頻譜分析,進行快速傅里葉變換,結果如圖17 所示。
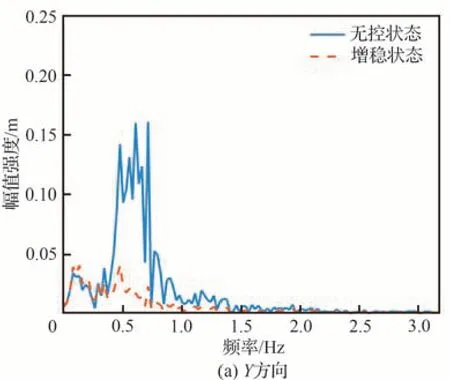
圖17 Y、Z 方向錐套飄擺頻譜分析Fig.17 Spectrum analysis of drogue Y,Z motion
可以看出,無控狀態下,錐套抖振能量主要集中于0.47~1.10 Hz頻率范圍內,該范圍內Y 方向最大幅值強度達到0.16 m,Z 方向最大幅值強度達到0.11 m;開啟增穩模式后,錐套在大于0.48 Hz范圍的高頻抖振得到明顯削弱,整體幅值強度降低至0.05 m 以下,有效削弱了錐套高頻動態響應,為空中加油精確對接控制實現創造了良好條件。
5 結論
基于動量交換原理的主動增穩控制提供了一種新型的增穩錐套實現方案,據作者調研目前尚無基于動量交換原理開展加油錐套飄擺抑制的相關研究,本文創新提出了自旋動量環式主動增穩錐套方案,基于拉格朗日方程開展建模研究,并進行了基于動量環控制的錐套飄擺抑制控制設計與仿真,得到如下主要結論:
1)提出的自旋動量環式主動增穩錐套,相比于傳統翼舵式主動增穩錐套,結構更加緊湊,釋放回收中安全風險更低。
2)現有軟管-錐套建模方法難以對動量環轉動時產生的動量矩進行表征,基于拉格朗日方程建立的軟管-錐套組合體飄擺運動模型,能夠準確反映動量環旋轉對于錐套飄擺運動的影響。
3)基于動量環控制的錐套飄擺抑制方案,能夠有效縮短陣風干擾下錐套收斂至穩態位置的時間,有效抑制大氣紊流干擾下錐套飄擺幅度,削弱錐套高頻動態響應;未來將進一步進行試驗,驗證本文方案的有效性。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
