
機械手自適應控制策略研究與實現
2024-05-13 15:36:20彭春濤
信息系統工程 2024年4期
關鍵詞:控制策略
彭春濤
摘要:機械手自適應控制策略的研究與實現在工業自動化領域扮演著關鍵的角色,旨在提高機械手的精確性、魯棒性等性能。對自適應控制進行了一定論述。在此基礎上,分別從自適應控制算法和控制策略選擇與設計兩方面探討了機械手自適應控制策略,并結合機械手自適應控制的特點,分析了機械手自適應控制策略的實現,有助于推動機械手自適應控制水平的不斷提高,進而提高機械手的工作精度。
關鍵詞:機械手;自適應;控制策略
一、前言
隨著工業自動化的迅速發展,機械手作為一種重要的自動化設備,被廣泛應用于制造業、物流和倉儲等領域。機械手的精準控制對于提高生產效率、降低成本以及減少人工勞動的依賴具有重要意義。然而,由于工作環境的多樣性和復雜性,機械手控制往往面臨著不確定性、非線性和擾動等挑戰,傳統的控制方法難以滿足高精度和高性能的需求。因此,機械手自適應控制策略研究與實現具有非常重要的現實意義。
二、自適應控制概述
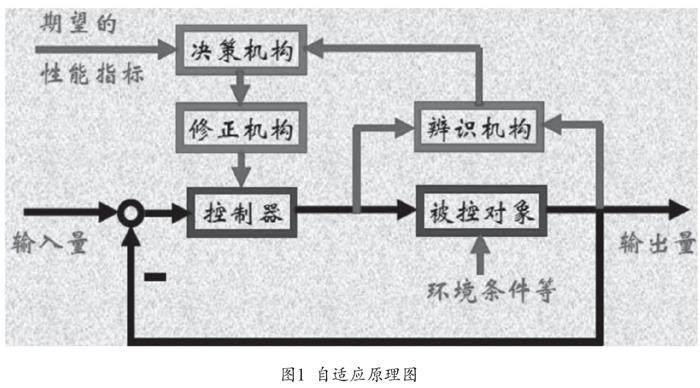
自適應控制是一種控制方法,其核心原理在于系統的自我調整和適應,如圖1所示。在機械手領域,自適應控制的目標是使機械手能夠在面對不斷變化的工作環境和任務時,自動地調整其控制策略,以保持高效、穩定和精確的運動。
自適應控制的原理涉及對系統的實時監測和反饋,系統會根據外部環境和任務的變化,自動地調整其參數和控制策略,以實現所期望的性能和任務要求。這種自我調整的過程通常依賴于傳感器和算法,它們能夠收集環境信息、識別障礙物、測量運動和力量等,然后將這些信息反饋給控制系統。在機械手自適應控制中,一個關鍵的原理是系統建模與識別。系統需要能夠理解其自身的動態特性和響應,以便在不同情況下適應性地調整控制輸入[1-2],通常涉及使用數學模型或者神經網絡等方法,以實時地估計系統的參數和狀態。
三、機械手自適應控制策略
(一)自適應控制算法
1.模型參考自適應控制
模型參考自適應控制是通過建立系統的數學模型,將模型的輸出與實際系統的輸出進行比較,然后根據比較結果來自動調整控制器的參數,以實現系統的自適應控制。這種算法的核心目標是使系統能夠自動調整以應對不斷變化的工作條件和要求,從而提高系統的性能和穩定性。
在模型參考自適應控制中,首先,需要建立一個數學模型來描述所控制系統的動態行為。這個模型可以是線性或非線性的,但必須準確地反映出系統的特性。然后,將模型的輸出與實際系統的輸出進行比較,產生誤差信號。這個誤差信號表示了系統當前狀態與期望狀態之間的偏差。其次,控制器根據誤差信號來自動調整系統的控制參數,通常通過使用梯度下降等優化算法來實現。控制器會根據誤差信號的大小和方向來調整參數,以減小誤差并使系統逐漸收斂到期望狀態。這個參數調整過程是實時進行的,允許系統在運行過程中不斷適應變化的工作條件。
2.魯棒自適應控制
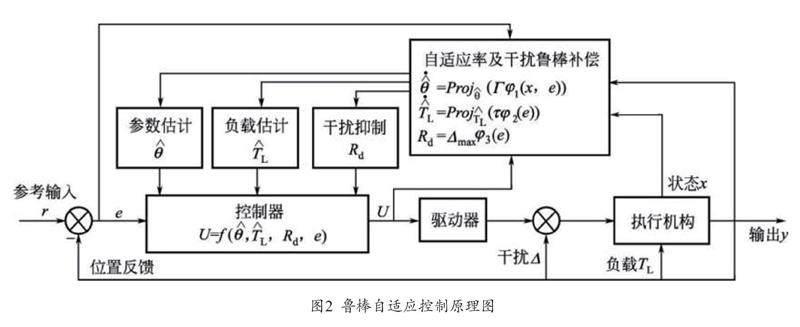
魯棒自適應控制的主要目標是提高系統對于參數不確定性和外部擾動的魯棒性。與傳統自適應控制不同,魯棒自適應控制不僅考慮了系統模型的自適應調整,還注重系統在面對各種不確定因素時能夠保持穩定性。這種控制策略的核心思想是在自適應控制的基礎上引入魯棒性設計,以應對實際工程中常見的不確定性和變化,其原理如圖2所示。
在魯棒自適應控制中,控制系統首先會對系統建立一個適當的數學模型,然后根據該模型進行自適應參數調整,以實現期望的控制性能。與此同時,魯棒性設計的關鍵在于引入額外的魯棒性控制策略,以確保系統對于模型誤差、參數變化、外部擾動等不確定因素具有穩定性和魯棒性。這些魯棒性控制策略包括滑模控制、H∞控制、模糊控制等,它們的作用是在自適應調整的基礎上對系統進行額外的保護和穩定性增強[3-4]。
3.神經網絡自適應控制
神經網絡自適應控制是一種基于神經網絡的自適應控制方法,它結合了神經網絡的非線性映射能力和自適應控制的特點,用于處理復雜系統的控制問題。這種方法的核心思想是利用神經網絡來近似未知的系統動態特性,然后根據神經網絡的輸出來調整控制器的參數,以實現對系統的自適應調節。
在神經網絡自適應控制中,首先需要設計一個適當的神經網絡結構,通常是多層前饋神經網絡(MLP)或循環神經網絡(RNN),用于模擬系統的輸入和輸出之間的映射關系。這個神經網絡會接受系統的輸入和輸出數據,并通過訓練過程來不斷優化網絡的權重和偏置,以提高模型的預測精度。其次,一旦神經網絡模型訓練完成,它可以被用作控制系統的一部分,通常被稱為自適應控制器。這個控制器根據系統當前的狀態和輸出,通過神經網絡計算出控制輸入,然后對系統進行控制。由于神經網絡的非線性映射特性,神經網絡自適應控制可以適應復雜的系統動態特性和未知的系統變化,從而實現對系統的自適應調節和控制[5]。
(二)控制策略選擇與設計
1.參數估計方法
在機械手自適應控制中,參數估計方法用于確定系統模型中的未知參數,從而實現對系統的準確控制。參數估計方法的選擇和設計對于控制系統的性能和穩定性具有重要影響。
首先是最小二乘法(Least Squares Method),它通過最小化實際輸出與模型輸出之間的誤差平方和來估計系統參數。這種方法適用于線性系統和非線性系統,具有較好的數值穩定性。最小二乘法的核心思想是找到使得誤差平方和最小的參數估計值,通常通過迭代優化算法來實現。其次是擴展卡爾曼濾波(Extended Kalman Filter,EKF),它主要用于非線性系統的參數估計。EKF通過將系統的狀態和參數同時估計,利用卡爾曼濾波的遞推過程來更新參數估計值。這種方法在非線性系統中具有較好的估計性能,但對于參數估計的初始條件和測量噪聲要求較高。最后,還有一些其他的參數估計方法,如粒子濾波(Particle Filter)、最大似然估計(Maximum Likelihood Estimation)等,它們在不同的應用場景中都具有一定的優勢和適用性[6]。
2.自適應觀測器設計
自適應觀測器是機械手自適應控制中的重要組成部分,其設計旨在估計系統的未知狀態或參數,以實現對系統的自適應調節和控制。自適應觀測器的基本原理是通過觀測系統的輸出和輸入數據,利用適當的觀測器結構和算法來估計系統的內部狀態或參數。這些觀測器通常包括狀態觀測器和參數觀測器,具體的設計取決于系統的性質和控制目標。在自適應觀測器的設計中,關鍵問題包括觀測誤差的穩定性、收斂性和估計誤差的收斂速度。設計者需要考慮系統的動態特性、觀測噪聲的影響以及控制性能的要求。常見的自適應觀測器設計方法包括最小二乘觀測器、卡爾曼濾波觀測器、高增益觀測器等。最小二乘觀測器通過最小化觀測誤差的平方和來估計系統狀態或參數,適用于線性系統和高斯噪聲環境。卡爾曼濾波觀測器則基于卡爾曼濾波理論,能夠有效處理線性和非線性系統以及不確定性噪聲。高增益觀測器引入高增益增強觀測器的敏感性,適用于快速收斂和高精度估計的應用場景。
3.控制器設計與參數調整
機械手自適應控制中的控制器設計與參數調整是確保系統性能和穩定性的關鍵步驟。控制器的設計涉及選擇合適的控制策略和設計控制器的結構,而參數調整則是根據系統的實際情況對控制器的參數進行調整,以達到期望的控制性能。
首先,在控制策略選擇方面,根據機械手系統的特性和控制目標,可以采用不同的控制策略,包括比例積分微分(PID)控制、模型參考自適應控制、模糊控制、神經網絡控制等。每種控制策略都有其適用的場景和優勢,需要根據具體情況進行選擇。例如,PID控制適用于線性系統和簡單的控制任務,自適應控制則適用于復雜的非線性系統和變化較大的環境。其次,控制器的設計需要考慮系統的動態特性和性能要求。對于自適應控制器,通常需要設計一個適當的自適應規律,以實現對系統參數的在線估計和調整。同時,控制器的結構和參數選擇也需要考慮控制系統的穩定性和抗干擾能力。控制器的設計可以借助系統建模和仿真來驗證和優化,以確保其在實際應用中能夠有效控制機械手系統。最后,參數調整是控制器設計的一個重要環節,通過對控制器參數的調整,可以實現系統的最佳性能。參數調整通常包括選擇合適的控制增益、積分時間常數和微分時間常數等參數,并根據實際運行情況進行在線調整。參數調整的方法包括試驗法、自整定法、優化算法等,具體選擇取決于系統的復雜性和可調性。
四、機械手自適應控制策略的實現
(一)控制系統硬件設計
在自適應控制策略的實現中,控制系統的硬件設計扮演著至關重要的角色,因為它直接影響了機械手的性能和穩定性。
首先,傳感器系統的設計是關鍵之一。傳感器用于監測機械手的關鍵參數,如位置、速度、力和扭矩,為自適應控制算法提供實時反饋數據。因此,需要選擇適當的傳感器類型,如編碼器、慣性傳感器、力傳感器等,并將它們精確地集成到機械手的關鍵位置。傳感器的選型和位置安裝應根據機械手的工作范圍和精度要求來確定。其次,執行器和電機的設計是另一個重要方面。執行器是機械手的執行部件,直接受控制系統指令驅動,因此,需要選擇高性能的電機和執行器來確保機械手的動作精確和穩定。電機的類型和規格必須根據機械手的負載、速度和精度需求進行選擇,并與控制系統進行有效的電氣和機械集成。再次,嵌入式計算單元也是不可或缺的一部分。自適應控制算法通常需要大量的實時計算和數據處理。因此,需要配置高性能的嵌入式計算單元,如微控制器或嵌入式處理器,以支持算法的快速執行。同時,嵌入式計算單元還應具備足夠的存儲容量,以存儲控制算法、參數和歷史數據。通信模塊的集成也是重要的被考慮因素之一。在某些情況下,機械手需要與其他設備或上位系統進行通信,以實現協同操作或數據交換。因此,在硬件設計中,需要考慮集成通信模塊,如以太網、CAN總線或其他通信協議,以確保機械手能夠與外部系統之間進行高效的通信。最后,安全性和可靠性必須放在設計的核心位置。機械手通常在工業環境中運行,因此,硬件設計需要包括防止過載和碰撞的保護機制、緊急停止系統,以及適應惡劣環境的設計,以確保機械手在各種情況下都能安全運行。
(二)控制算法的編程和軟件實現
控制算法的編程和軟件實現是實現機械手自適應控制策略的核心部分。
首先,需要仔細選擇適合研究目標的自適應控制算法,如模型參考自適應控制、自適應滑模控制或神經網絡控制。算法的選擇應該基于系統的非線性性、不確定性和性能需求。一旦算法選擇確定,需要選擇合適的編程語言和開發環境來實現這些算法。常用的編程語言包括C/C++、Python、MATLAB/Simulink等,開發環境應該提供強大的工具和庫,以支持算法的開發和測試。其次,在實現過程中,將控制算法與機械手的硬件系統集成,確保它與傳感器、執行器和嵌入式計算單元之間的通信正常工作。這要求有效地處理傳感器數據、計算控制指令,并將數據和指令傳遞給機械手執行器。參數調整是控制算法實現的一個關鍵步驟。自適應控制算法通常依賴于一些參數,這些參數需要根據實際情況進行調整,以滿足性能要求。有時,可能需要在線自適應方法來根據實時反饋調整參數,以適應系統的變化和不確定性。最后,穩定性和魯棒性分析是控制算法實現過程中的另一個重要方面。確保控制系統在各種工作條件下都能穩定運行,并且對外部擾動和不確定性具有良好的魯棒性是必要的。同時,要優化算法以減小計算延遲,確保機械手對外部變化能夠及時響應,從而實現實時性和效率。
(三)實驗平臺的搭建
實驗平臺的搭建旨在提供一個受控的環境,以驗證和測試所開發的自適應控制算法的性能和魯棒性。在這個過程中,需要考慮多個關鍵因素:
首先,機械手的選擇至關重要,它應根據研究的具體目標和應用領域來確定。機械手的型號、自由度和負載能力必須與研究需求相匹配。其次,需要合理配置傳感器系統,以實時獲取關鍵參數數據,如位置、速度、力和扭矩。這些傳感器應精確安裝在機械手上,并確保其穩定性和準確性,以確保實驗結果的可信度。控制系統的集成是搭建實驗平臺的另一個重要方面。先前開發的自適應控制算法和軟件必須與機械手的硬件系統順暢地通信和協同工作,確保控制指令的傳遞和實時數據的采集。最后,實驗平臺需要一個穩定的臺架和適當的安全措施,以確保機械手在實驗期間的穩定性和安全性。緊急停止裝置和防護措施是必不可少的,以應對潛在的風險和意外情況。數據采集系統應該被建立,以記錄實驗中產生的各種數據,包括傳感器讀數、控制指令以及機械手的實際運動軌跡。這些數據對于后續的分析和驗證非常關鍵。
五、結語
綜上所述,機械手自適應控制策略的研究與實現為工業自動化領域帶來了重要的技術突破和應用前景。通過不斷深入研究和創新,有望進一步提高機械手系統的性能,推動工業自動化領域的發展,實現更加智能和高效的制造和物流過程。在未來的研究和實踐中,需要繼續關注自適應控制策略的改進和應用,以滿足不斷發展的工業需求。
參考文獻
[1]黃哲,顏廷旭.基于自適應遺傳算法的柔性機械手抑振軌跡優化[J].工業控制計算機,2023,36(11):121-123.
[2]吳哲.纏繞機械手的自適應滑模控制方方法與與應用[D].杭州:杭州電子科技大學,2023.
[3]王春森.自適應欠驅動仿生機械手的設計[D].哈爾濱:黑龍江大學,2023.
[4]劉洋洋,院老虎,騰英元,等.基于RBF神經網絡補償的自適應滑模機械手控制[J].組合機床與自動化加工技術,2023(06):119-122+127.
[5]潘玉芬.自適應機械手爪的專利技術綜述[J].河南科技,2023,42(10):142-145.
[6]黃哲,顏廷旭.基于自適應遺傳算法的柔性機械手抑振軌跡優化[J].工業控制計算機, 2023,36(11):121-123.
責任編輯:張津平、尚丹
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
