基于模型的空投任務(wù)飛行品質(zhì)試飛設(shè)計(jì)及評(píng)估
2024-05-17 12:24:12李雅靜申曉明
計(jì)算機(jī)測(cè)量與控制 2024年4期
關(guān)鍵詞:飛機(jī)
李雅靜,申曉明
(1.中國(guó)飛行試驗(yàn)研究院 飛機(jī)所,西安 710089;2.中國(guó)航空工業(yè)第一飛機(jī)設(shè)計(jì)研究院 總體氣動(dòng)所,西安 710089)
0 引言
空投功能試飛驗(yàn)證是軍用運(yùn)輸機(jī)試飛過(guò)程中的重點(diǎn)和難點(diǎn),尤其是飛機(jī)在空投模態(tài)下,從打開(kāi)艙門(mén)貨物開(kāi)始移動(dòng),到最終投出貨物的過(guò)程中,飛機(jī)的操縱性穩(wěn)定性會(huì)發(fā)生很大的變化,從而給空投試飛帶來(lái)了很大的風(fēng)險(xiǎn),甚至造成嚴(yán)重的機(jī)毀人亡事件。
國(guó)外針對(duì)空投任務(wù)的建模仿真和飛行試驗(yàn)都有較為全面深入的技術(shù)分析,在建模仿真方面文獻(xiàn)[1]為貨物出艙過(guò)程建立了統(tǒng)一的動(dòng)力學(xué)模型,通過(guò)仿真分析了貨物出艙過(guò)程對(duì)飛機(jī)俯仰姿態(tài)的影響,文中對(duì)出艙時(shí)間及安全距離參數(shù)同牽引比、貨物位置和飛機(jī)姿態(tài)的關(guān)系進(jìn)行了討論,表明飛機(jī)姿態(tài)是空投過(guò)程中的重要控制參數(shù)。在飛行試驗(yàn)方面,國(guó)外開(kāi)展了大量研究,文獻(xiàn)[2]中對(duì)運(yùn)輸機(jī)空投試驗(yàn)計(jì)劃、試驗(yàn)實(shí)施流程給出了比較明確的規(guī)定,但對(duì)于空投時(shí)飛機(jī)飛行品質(zhì)試驗(yàn)設(shè)計(jì)及評(píng)價(jià)并沒(méi)有詳細(xì)地闡述。文獻(xiàn)[3]中對(duì)C130-E空投飛行試驗(yàn)過(guò)程進(jìn)行大量飛行測(cè)試,分析了牽引比、襟翼位置、空投速度、重心變化及風(fēng)切變等因素對(duì)空投過(guò)程飛行性能的影響。
近年空投技術(shù)在國(guó)內(nèi)引起了很多研究學(xué)者的關(guān)注,在空投對(duì)飛行品質(zhì)影響方面主要集中在理論、模型仿真研究,通過(guò)仿真對(duì)貨物出艙過(guò)程建立統(tǒng)一的動(dòng)力學(xué)模型[4-5],通過(guò)仿真分析貨物出艙對(duì)飛機(jī)俯仰姿態(tài)的影響,并引入出艙時(shí)間評(píng)估出艙過(guò)程對(duì)空投精度影響等。文獻(xiàn)[6]設(shè)計(jì)了連投模式對(duì)飛機(jī)影響的分析模型,并通過(guò)實(shí)例計(jì)算分析了連投模式對(duì)空投物運(yùn)動(dòng)狀態(tài)以及飛機(jī)的影響程度,分析了重裝連投中因貨物連續(xù)出艙運(yùn)動(dòng)對(duì)飛機(jī)狀態(tài)的影響,實(shí)現(xiàn)了貨物運(yùn)動(dòng)過(guò)程對(duì)飛機(jī)影響的可視化。
在空投飛行試驗(yàn)方面,國(guó)內(nèi)相關(guān)文獻(xiàn)較少,現(xiàn)行飛行品質(zhì)國(guó)軍標(biāo)GJB185-1986[7]中針對(duì)空投只有飛行階段要求和一些開(kāi)環(huán)指標(biāo)要求,并沒(méi)有明確提出面向任務(wù)的飛行品質(zhì)評(píng)價(jià)方法。
綜上所述,對(duì)于全新設(shè)計(jì)的運(yùn)輸機(jī)和空投系統(tǒng),我國(guó)之前在空投過(guò)程中飛行品質(zhì)試飛方面還沒(méi)有形成一整套完善的理論研究和試驗(yàn)技術(shù)體系。為了保證重裝空投飛行試驗(yàn)安全,建立了空投過(guò)程數(shù)學(xué)模型,預(yù)測(cè)空投過(guò)程飛機(jī)響應(yīng)、使用“預(yù)測(cè)→驗(yàn)證→比較→預(yù)測(cè)”的方法指導(dǎo)飛行試驗(yàn)循序漸進(jìn)實(shí)施;在空投試飛前,分析空投貨物時(shí)飛機(jī)響應(yīng)特點(diǎn),確定載機(jī)平臺(tái)飛行品質(zhì)試飛內(nèi)容,評(píng)價(jià)空投構(gòu)型飛行品質(zhì),作為空投飛行試驗(yàn)的前提;對(duì)于空投任務(wù)飛行試驗(yàn)設(shè)計(jì)從試飛狀態(tài)選擇、試飛員操縱方法設(shè)計(jì)兩方面開(kāi)展研究,以飛機(jī)姿態(tài)控制為目標(biāo),確定重力空投、牽引空投過(guò)程飛機(jī)飛行狀態(tài)、給出飛行員操縱建議,設(shè)計(jì)了空投過(guò)程評(píng)價(jià)要素表,形成面向空投任務(wù)的飛行試驗(yàn)設(shè)計(jì)及飛行品質(zhì)評(píng)價(jià)技術(shù),填補(bǔ)我國(guó)在空投飛行試驗(yàn)設(shè)計(jì)及飛行品質(zhì)評(píng)估技術(shù)上的空白。
1 空投構(gòu)型飛行品質(zhì)試飛設(shè)計(jì)
在空投前,評(píng)估飛機(jī)空投構(gòu)型操穩(wěn)特性,飛行品質(zhì)涉及空投過(guò)程中飛行安全。運(yùn)輸機(jī)空投構(gòu)型下首先要滿足飛行品質(zhì)規(guī)范相關(guān)要求。重力空投和牽引空投都是貨物在艙內(nèi)運(yùn)動(dòng)到出艙的過(guò)程,對(duì)載機(jī)平臺(tái)的影響類似,只是在飛行員操縱的過(guò)程有差別,在空投前飛機(jī)操穩(wěn)評(píng)估中試飛內(nèi)容相同。
GJB185-1986有人駕駛飛機(jī)(固定翼)飛行品質(zhì)和美軍標(biāo)MIL-STD-1797A中對(duì)空投構(gòu)型下飛行品質(zhì)要求一致,運(yùn)輸機(jī)空投屬于轟運(yùn)類(HY)航行階段即B種飛行階段。
空投過(guò)程是受擾動(dòng)過(guò)程,需要考慮縱向和橫航向運(yùn)動(dòng)模態(tài)特性、考慮穩(wěn)定性和操縱性。空投包線范圍內(nèi)檢查開(kāi)艙門(mén)構(gòu)型飛機(jī)飛行品質(zhì)。
1)縱向穩(wěn)定性要求:對(duì)空投過(guò)程縱向穩(wěn)定性的評(píng)估主要為靜穩(wěn)定性;
2)縱向操縱性要求:評(píng)估操縱期望參數(shù)飛行品質(zhì)等級(jí);
3)空投過(guò)程中偏航運(yùn)動(dòng)會(huì)使飛機(jī)偏離預(yù)定航線,影響空投精度,評(píng)估橫側(cè)運(yùn)動(dòng)的飛行品質(zhì),要考慮穩(wěn)定性和運(yùn)動(dòng)模態(tài)特性兩方面;
4)貨物在移動(dòng)并投出的過(guò)程中由于運(yùn)動(dòng)的不對(duì)稱還會(huì)對(duì)飛機(jī)產(chǎn)生滾轉(zhuǎn)或偏航擾動(dòng),空投構(gòu)型下還需要檢查滾轉(zhuǎn)操縱效能、滾轉(zhuǎn)操縱力及滾轉(zhuǎn)操縱力限制,保證開(kāi)門(mén)情況下的飛行橫向操縱能力。
以上確定了投物前需要進(jìn)行飛行品質(zhì)評(píng)估的最小集合,完成飛機(jī)平臺(tái)空投構(gòu)型的飛行品質(zhì)評(píng)估保證了空投任務(wù)安全性。
2 空投過(guò)程飛機(jī)響應(yīng)分析
2.1 基于空投任務(wù)模型的空投響應(yīng)預(yù)測(cè)
以牛頓多體動(dòng)力學(xué)方法,分別分析飛機(jī)與運(yùn)動(dòng)貨物所受的力與力矩。考慮到貨物運(yùn)動(dòng)與貨艙地板平行,在飛機(jī)體軸系建立飛機(jī)-貨物耦合的飛行動(dòng)力學(xué)與運(yùn)動(dòng)學(xué)方程組,進(jìn)行仿真模擬[8-22]。
選擇分離法,將貨物和飛機(jī)看作兩個(gè)分離的子系統(tǒng),分別對(duì)兩者進(jìn)行受力分析,得出他們之間的相互作用力,從而建立飛機(jī)的運(yùn)動(dòng)方程,貨物運(yùn)動(dòng)對(duì)飛機(jī)產(chǎn)生的影響可以看作飛機(jī)受到的擾動(dòng)。
貨物在艙內(nèi)移動(dòng)過(guò)程中受到的力有[10]:牽引力、物體與貨艙地板的摩擦力、飛機(jī)給貨物的約束力及貨物自身重力。

(1)
貨物離機(jī)前從飛機(jī)中心位置開(kāi)始一直向后移動(dòng),因此它對(duì)飛機(jī)產(chǎn)生的是一個(gè)逐漸變化的擾動(dòng)力矩,設(shè)3個(gè)方向的擾動(dòng)力矩分別為L(zhǎng)t,Mt,Nt,貨物在機(jī)體坐標(biāo)系下的坐標(biāo)為(d,0,0),則:
Lt=yFNz-zFNy=0
Mt=zFNx-xFNz=
Nt=xFNy-yFNx=
(2)
貨物艙內(nèi)移動(dòng)過(guò)程飛機(jī)模型,空投飛機(jī)運(yùn)動(dòng)方程跟常規(guī)飛機(jī)相比只是多了一個(gè)貨物運(yùn)動(dòng)產(chǎn)生的擾動(dòng)項(xiàng)。設(shè)空投飛機(jī)空機(jī)質(zhì)量為ma,領(lǐng)mc=ma+mb,運(yùn)用牛頓定律,可得機(jī)體坐標(biāo)系下空投飛機(jī)力平衡方程如下:
mcvr-mwq-Fpcosα-mbab
mcur+mbvbr
mcgcosθcosφ+mcuq-mcvp-Fpsinα-mbvbq
(3)
空投飛機(jī)力矩平衡方程表達(dá)式等同于常規(guī)飛機(jī)及力矩方程,不同的是其質(zhì)心受到的力矩除了氣動(dòng)力矩Lb,推力矩Lr,還包括貨物對(duì)飛機(jī)產(chǎn)生的擾動(dòng)力矩Lt,其中Lt前面已經(jīng)推導(dǎo)出具體表達(dá)式,Lb和Lr與常規(guī)飛機(jī)力矩模型相同。
貨物離機(jī)后,空投飛機(jī)的質(zhì)量、質(zhì)心及轉(zhuǎn)動(dòng)慣量產(chǎn)生突然變化,從力學(xué)上講等同于給飛機(jī)尾部又突然施加一個(gè)向上的推力。此時(shí),空投系統(tǒng)變?yōu)槌R?guī)飛機(jī)系統(tǒng),因此這個(gè)階段的數(shù)學(xué)模型即為常規(guī)飛機(jī)的六自由度模型,這一點(diǎn)在仿真階段容易實(shí)現(xiàn),即貨物離機(jī)后領(lǐng)空投系統(tǒng)數(shù)學(xué)模型中的mb=0。
在牽引傘已確定的條件下,空投過(guò)程典型的影響因素包括飛行速度、貨物質(zhì)量,將飛行速度和貨物重量的影響均等效到牽引比參數(shù)上進(jìn)而進(jìn)行影響因素分析。
一定速度時(shí),機(jī)組不施加操縱輸入、不同貨物質(zhì)量(對(duì)應(yīng)特定牽引比),貨物質(zhì)量越大牽引比越小,空投過(guò)程的典型參數(shù)增量結(jié)果如圖1所示。
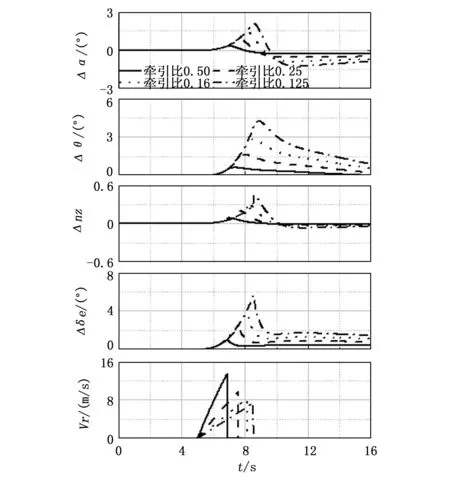
圖1 不同貨物重量飛機(jī)與貨物典型狀態(tài)量增量
如圖1所示,第0~5 s保持穩(wěn)定飛行并打開(kāi)牽引傘,第5 s貨物開(kāi)始運(yùn)動(dòng)。圖中:Δα為迎角變化量;Δθ為俯仰角變化量;Δnz為法向過(guò)載變化量;Δδe為升降舵變化量;Vr為貨物相對(duì)飛機(jī)向后運(yùn)動(dòng)的速度。
一定貨物質(zhì)量時(shí),機(jī)組不施加操縱輸入、不同飛行速度(對(duì)應(yīng)特定牽引比),飛行速度越大牽引比越大,空投過(guò)程的典型參數(shù)增量結(jié)果如圖2所示。第0~5 s保持穩(wěn)定飛行并打開(kāi)牽引傘,第5 s貨物開(kāi)始運(yùn)動(dòng)。

圖2 不同空投飛行速度飛機(jī)與貨物典型狀態(tài)量增量
空投開(kāi)始以后,貨物先向飛機(jī)機(jī)身后部的艙門(mén)移動(dòng),然后從出艙口投出。當(dāng)貨物向出艙口移動(dòng)時(shí)并在到達(dá)出艙口之前時(shí),為保持載機(jī)的定直平飛狀態(tài),駕駛員需要推桿,以抑制飛機(jī)俯仰角的增加。當(dāng)貨物到達(dá)出艙口并投出時(shí),為保持載機(jī)的平衡狀態(tài),駕駛員需要拉桿,以抑制飛機(jī)俯仰角的減小。根據(jù)仿真結(jié)果,貨物重量、空投速度不同對(duì)空投飛機(jī)響應(yīng)特性影響可概括為:
1)飛行速度增加是有利的,空投牽引比增加,起始俯仰角明顯減小,空投過(guò)程飛機(jī)典型狀態(tài)量的增量略減小;
2)貨物質(zhì)量增加是不利的,牽引比明顯減小,起始俯仰角略增加,空投過(guò)程飛機(jī)典型狀態(tài)量的增量明顯增加;
通常大質(zhì)量貨物、小空投速度為嚴(yán)酷工況。小速度空投大質(zhì)量貨物時(shí),艙內(nèi)運(yùn)動(dòng)時(shí)間長(zhǎng),明顯增加飛機(jī)俯仰角。
2.2 空投過(guò)程俯仰角控制
俯仰角保持是空投段飛行員主要任務(wù)之一。正的俯仰角時(shí)貨物重力產(chǎn)生一個(gè)沿滑軌出艙方向的分離,同時(shí)由于垂直滑軌方向的分力減小使摩擦力有所減小,有利于貨物出艙過(guò)程。希望空投段飛機(jī)俯仰角為正值,但并非越大越好。空投段俯仰角應(yīng)控制在恰當(dāng)?shù)姆秶鷥?nèi)。
對(duì)于重力空投,姿態(tài)要求為正,可以使貨物由重力作用出艙,但姿態(tài)不可太大,姿態(tài)太大會(huì)導(dǎo)致貨物被“傾倒”出艙,貨物間存在交叉干擾,不利于貨物順利著陸。根據(jù)出艙速度確定俯仰姿態(tài)最優(yōu)值。
對(duì)于牽引空投,空投前配平姿態(tài)和空投過(guò)程中姿態(tài)需要控制在一定范圍,不能過(guò)大或過(guò)小。若空投姿態(tài)過(guò)大,有可能導(dǎo)致?tīng)恳齻憷K打到機(jī)尾,損壞飛機(jī)結(jié)構(gòu)。若空投姿態(tài)過(guò)小甚至為負(fù)姿態(tài)時(shí)不利于貨物出艙,一方面在該狀態(tài)下,當(dāng)牽引傘牽引力不足以克服貨物重力時(shí),有可能出現(xiàn)貨物拖著牽引傘向貨艙內(nèi)部移動(dòng)的情況,此時(shí),有可能在貨臺(tái)的撞擊作用下?lián)p壞飛機(jī)結(jié)構(gòu);另一方面,假設(shè)牽引傘可牽引貨物出艙,則在該過(guò)程中,傘繩會(huì)在牽引力作用下緊貼在貨橋邊緣左右擺動(dòng),有可能出現(xiàn)傘繩被割斷的情況,使得貨物快速移向貨艙內(nèi)部,損壞飛機(jī)結(jié)構(gòu)。所以根據(jù)牽引傘牽引力、飛機(jī)與牽引傘幾何關(guān)系,確定空投俯仰姿態(tài)范圍。
根據(jù)俯仰姿態(tài)角限制,對(duì)于重力空投(一般小件連投使用),在空投過(guò)程中要求精確地保持飛機(jī)的姿態(tài),需要持續(xù)操縱飛機(jī),貨物艙內(nèi)后移時(shí)推桿,在貨物出艙后稍拉桿,以期精確保持姿態(tài)。對(duì)于牽引空投(中間、大件、重裝單投或聯(lián)投空投使用),在空投過(guò)程中,只要姿態(tài)不超過(guò)限制即可,在投物重量較小時(shí)引起飛機(jī)姿態(tài)變化量較小時(shí)可以不進(jìn)行干預(yù),但對(duì)于較大重量貨物空投,引起姿態(tài)變化較大可能超過(guò)姿態(tài)限制時(shí),需要進(jìn)行干預(yù),在貨物艙內(nèi)后移時(shí)適量推桿,在貨物出艙后及時(shí)拉桿。
2.3 空投過(guò)程滾轉(zhuǎn)角控制
飛機(jī)滾轉(zhuǎn)會(huì)影響偏航運(yùn)動(dòng),使飛機(jī)偏離預(yù)定航線,影響精度,空投段希望控制滾轉(zhuǎn)角0°,實(shí)際操縱過(guò)程中存在控制誤差,建議滾轉(zhuǎn)角控制在5°以內(nèi)。
3 空投任務(wù)飛行試驗(yàn)設(shè)計(jì)技術(shù)
飛機(jī)飛行試驗(yàn)方法設(shè)計(jì)一般包括兩方面:1)試飛狀態(tài)選擇;2)試飛員操縱方法設(shè)計(jì)。對(duì)于空投任務(wù)飛行試驗(yàn)設(shè)計(jì)也從兩方面開(kāi)展研究。
3.1 空投任務(wù)飛機(jī)狀態(tài)選擇
空投任務(wù)的襟縫翼構(gòu)型和速度的選擇都以空投姿態(tài)控制為目標(biāo)。為了保證貨物能夠順利出艙,并且不超出飛機(jī)姿態(tài)角、迎角等限制值,空投前保持穩(wěn)定且合適的配平姿態(tài)角尤其重要。
對(duì)于重力空投,空投重量較小,空投過(guò)程對(duì)飛機(jī)姿態(tài)影響較小,飛行員給予一定操縱干預(yù),即可保持飛機(jī)飛行狀態(tài),配平狀態(tài)要求不嚴(yán)格。
對(duì)于牽引空投,由于空投重量較大,空投過(guò)程對(duì)飛機(jī)姿態(tài)影響大,特別需要進(jìn)行初始配平姿態(tài)設(shè)計(jì)。
對(duì)于牽引空投,由于空投重量較大,空投過(guò)程對(duì)飛機(jī)姿態(tài)影響大,若初始配平姿態(tài)較大,則隨著貨物出艙引起的飛機(jī)抬頭增量的增加,使得空投姿態(tài)過(guò)大,超出俯仰姿態(tài)的限制,當(dāng)飛機(jī)處于較大負(fù)姿態(tài)時(shí)不利于貨物出艙。對(duì)于試驗(yàn)機(jī),空投時(shí)姿態(tài)角要求控制在一定范圍之內(nèi),為了將姿態(tài)角控制在要求的范圍之內(nèi),就需要合理選擇配平時(shí)的姿態(tài),也就是要合理選擇襟縫翼構(gòu)型和速度。
空投中考慮載機(jī)狀態(tài)的同時(shí),還需將影響載機(jī)安全的空投系統(tǒng)也納入分析范疇,而空投系統(tǒng)也有其自身的使用限制條件和包線。綜合考慮影響飛機(jī)姿態(tài)的變量,即飛機(jī)重量、飛行速度和襟縫翼構(gòu)形,以及姿態(tài)角限制、空投包線、貨臺(tái)使用包線等多個(gè)因素,設(shè)計(jì)了空投試驗(yàn)點(diǎn)選取矩陣并繪制成圖,見(jiàn)圖3,以便選取最優(yōu)的試驗(yàn)點(diǎn)用于牽引空投試飛。圖3中,橫坐標(biāo)表示飛機(jī)空投時(shí)的表速,縱坐標(biāo)表示飛機(jī)平飛配平迎角,亦是平飛姿態(tài)角;圖3中給出不同襟翼角度、不同重量、不同速度下的飛機(jī)配平姿態(tài)角,左右垂直虛線表示貨臺(tái)使用的速度包線,上下水平虛線表示姿態(tài)角限制范圍。
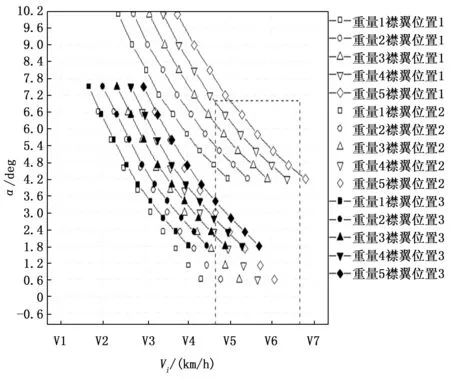
圖3 空投試驗(yàn)點(diǎn)選取
當(dāng)空投表速和飛機(jī)起飛重量一定時(shí),可根據(jù)圖3先確定合適的空投襟翼角度,然后通過(guò)飛機(jī)耗油特性來(lái)控制飛機(jī)空投時(shí)的總重量,從而達(dá)到將空投平飛姿態(tài)控制在虛框包線范圍內(nèi)的目的,使貨物能夠以合適的角度順利出艙。該圖同時(shí)也可用于指導(dǎo)空投包線擴(kuò)展試飛。
3.2 空投時(shí)飛行員操縱建議
大多數(shù)情況下,如果明確了飛機(jī)構(gòu)型、貨臺(tái)重量、牽引比、重心和空投速度,就可以在起飛前預(yù)測(cè)不操縱情況下飛機(jī)的姿態(tài)響應(yīng)。根據(jù)預(yù)測(cè)結(jié)果給出空投操縱建議,可有效降低試飛風(fēng)險(xiǎn)。
由于飛機(jī)的電傳飛控系統(tǒng)有自動(dòng)配平和姿態(tài)保持功能,在較小的擾動(dòng)下飛機(jī)可自動(dòng)保持平衡,不需要操縱,但在大的擾動(dòng)下則需要飛行員人工干預(yù),對(duì)于不同重量下空投操縱建議,使用“預(yù)測(cè)→驗(yàn)證→比較→預(yù)測(cè)”的方法,仿真數(shù)據(jù)結(jié)合輕重量過(guò)渡試驗(yàn),預(yù)測(cè)下一重量下空投操縱建議。
考慮空投前的配平俯仰角,機(jī)組無(wú)操縱輸入時(shí),空投過(guò)程可能存在俯仰角超出限制值的情況。
由于空投影響因素多,對(duì)于不同重量貨物,操縱建議為:可確定一個(gè)空投前配平俯仰角(該開(kāi)始值距俯仰角限制值有一定余量),空投過(guò)程重點(diǎn)監(jiān)控俯仰角數(shù)值及變化趨勢(shì),接近或達(dá)到開(kāi)始值時(shí)進(jìn)行操縱,避免俯仰角超出限制。
空投試飛時(shí),空投貨物重量由小到大逐步過(guò)渡,利用過(guò)渡重量下飛行試驗(yàn)飛機(jī)姿態(tài)變化數(shù)據(jù)與仿真預(yù)測(cè)對(duì)比,仿真與試驗(yàn)結(jié)果一致,預(yù)測(cè)下一重量空投姿態(tài)變化,預(yù)測(cè)姿態(tài)變化加上初始配平姿態(tài)接近或大于限制俯仰角,建議適當(dāng)操縱干預(yù)保證飛機(jī)空投姿態(tài)控制在要求的范圍內(nèi),否則可以不人為干預(yù)。具體的確定流程如圖4所示。
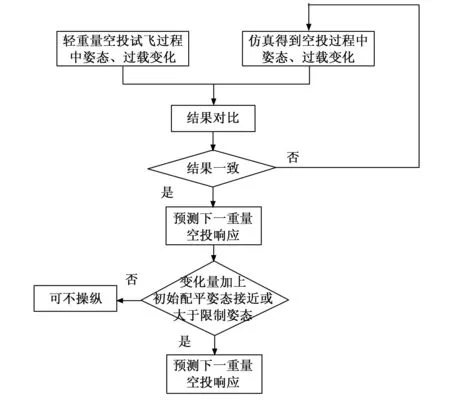
圖4 空投操縱建議確定流程
空投過(guò)程仿真除了需要計(jì)算得到高度、速度、姿態(tài)、過(guò)載等參數(shù)變化,還需要給出飛機(jī)裝載貨物的重心范圍、飛機(jī)空投貨物全機(jī)重心最后點(diǎn)位置、貨物卡滯在最臨界狀態(tài)的安全性及操縱建議[23]等。
4 面向空投任務(wù)的飛行品質(zhì)評(píng)估
4.1 空投階段品質(zhì)評(píng)估
由于貨物空投會(huì)給飛機(jī)帶來(lái)縱向和橫航向擾動(dòng),改變飛機(jī)空投初始時(shí)刻的平衡狀態(tài),為保證飛機(jī)和空投任務(wù)的安全,必須通過(guò)駕駛員或者飛機(jī)控制系統(tǒng)操縱飛機(jī)消除空投貨物引起的飛行狀態(tài)擾動(dòng)量,如俯仰角和滾轉(zhuǎn)角等。空投時(shí),較快的貨物移動(dòng)過(guò)程、較低的空投高度和較高飛行速度有利于空投過(guò)程的進(jìn)行和載機(jī)的安全性。裝載的貨物越重,飛機(jī)運(yùn)動(dòng)狀態(tài)變化越劇烈,飛機(jī)的俯仰角和迎角的峰值越大。
因此,運(yùn)輸機(jī)必須具有對(duì)干擾的抵抗能力和恢復(fù)能力,在保證飛行安全的前提下提高空投任務(wù)的完成能力,這也是評(píng)估空投過(guò)程飛行品質(zhì)的重要依據(jù)。
此外,GJB185-1986有人駕駛飛機(jī)(固定翼)飛行品質(zhì)和美軍表MIL-STD-1797A中對(duì)貨物投放時(shí)的品質(zhì)要求必須考慮在內(nèi),在貨物投放時(shí)不應(yīng)引起抖振、配平變化或其他對(duì)飛機(jī)在相應(yīng)飛行狀態(tài)下的戰(zhàn)術(shù)效能有所損害的特性,所以空投過(guò)程需要關(guān)注過(guò)載和配平量。
飛行品質(zhì)標(biāo)準(zhǔn)GJB185-1986提出的飛行品質(zhì)無(wú)法完全反映空投過(guò)程中飛行品質(zhì)變化特點(diǎn),也無(wú)法全面評(píng)估空投過(guò)程的飛行品質(zhì),需要對(duì)評(píng)估體系進(jìn)行完善。運(yùn)輸機(jī)必須具有對(duì)空投過(guò)程干擾的抵抗能力和恢復(fù)能力,才保證飛行安全的前提下提高空投任務(wù)的完成能力,這也是評(píng)估空投過(guò)程飛行品質(zhì)的重要依據(jù),運(yùn)輸機(jī)在空投階段的任務(wù)性能可用各飛行狀態(tài)量的變化范圍來(lái)衡量,飛行品質(zhì)評(píng)估體現(xiàn)在飛機(jī)空投過(guò)程中是否能將飛機(jī)控制在一定狀態(tài)的能力。關(guān)鍵參數(shù)如下:
1)對(duì)應(yīng)飛機(jī)重量,基礎(chǔ)信息;
2)速度變化量,飛行速度降低不導(dǎo)致失速;
3)姿態(tài)變化量,姿態(tài)保持在要求的范圍的能力;
4)出艙時(shí)間,對(duì)應(yīng)高度、速度、姿態(tài)下貨物移動(dòng)能力,一般單個(gè)貨物出艙時(shí)間5 s以內(nèi);
5)操縱補(bǔ)償量,操縱量不能太大,留有操縱余量,建議不大于操縱總行程的75%;
6)過(guò)載變化量,過(guò)載變化不能太大,一般不大于0.3。
上述狀態(tài)量是否能易于控制在一定范圍,標(biāo)志著飛機(jī)空投階段的任務(wù)能力。總結(jié)重力空投和牽引空投關(guān)注的關(guān)鍵參數(shù),不同重量空投過(guò)程中通過(guò)飛行員干預(yù)是否可以控制飛機(jī)姿態(tài)保持在要求的范圍內(nèi),檢查飛機(jī)的操縱能力。
4.2 空投任務(wù)飛機(jī)飛行品質(zhì)評(píng)價(jià)
首先以重力連投為例進(jìn)行分析,記錄表1中的12項(xiàng)關(guān)鍵參數(shù),以姿態(tài)控制為目標(biāo),在要求的空投重量下,確定合適的襟縫翼構(gòu)型和配平速度,對(duì)于單個(gè)小件貨物,出艙時(shí)間較短,連投貨物出艙時(shí)間視連投件數(shù)而定。檢查駕駛員操縱補(bǔ)償、升降舵使用量是否合適且留有足夠余量。試驗(yàn)機(jī)一次連投過(guò)程中,推拉桿量不超總操縱量的1/5,姿態(tài)可保持在3~4°范圍,升降舵用量不超3°,不超舵面偏度總行程的20%,飛機(jī)過(guò)載變化在0.3以內(nèi),說(shuō)明飛機(jī)有足夠的機(jī)動(dòng)能保證空投安全。
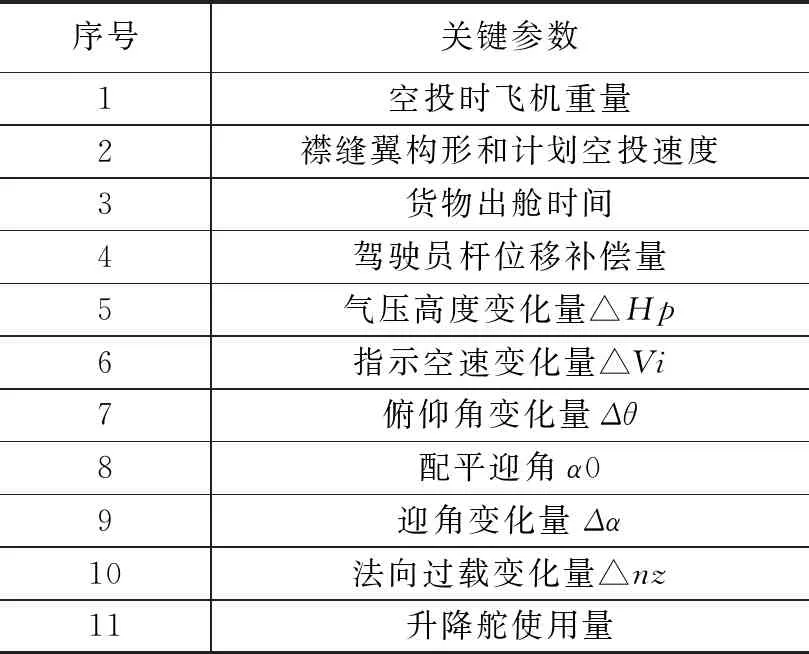
表1 重力連投關(guān)鍵參數(shù)表

表2 牽引空投關(guān)鍵參數(shù)表
對(duì)于牽引空投,特點(diǎn)是空投重量較大,記錄表格2中所有14項(xiàng)關(guān)鍵參數(shù),以姿態(tài)控制為目標(biāo),在要求的空投重量下,確定合適的襟縫翼構(gòu)型和配平速度,對(duì)于大件或重裝牽引空投出艙時(shí)間需要重點(diǎn)關(guān)注,重裝單投的貨物出艙時(shí)間不大于5 s。檢查駕駛員操縱補(bǔ)償、升降舵使用量是否合適且留有足夠余量,某次單投,飛行員未進(jìn)行操縱補(bǔ)償,姿態(tài)可控制在0~6°范圍,升降舵用量不超3°,不超舵面總行程的20%,過(guò)載變化可控制在0.3范圍內(nèi),說(shuō)明飛機(jī)有足夠的機(jī)動(dòng)能力保證空投安全。
5 結(jié)束語(yǔ)
針對(duì)空投任務(wù)進(jìn)行空投前操穩(wěn)特性試飛設(shè)計(jì)及空投過(guò)程中飛行品質(zhì)評(píng)估方法,利用文中提出的試驗(yàn)狀態(tài)選取方法、飛行操縱建議方法,完成試驗(yàn)機(jī)空投飛行試驗(yàn)。
在空投過(guò)程中,以姿態(tài)保持為目標(biāo),總結(jié)重力空投、牽引空投過(guò)程飛機(jī)狀態(tài)選擇、操縱建議、空投過(guò)程品質(zhì)評(píng)估方法,分析關(guān)鍵特征參數(shù),設(shè)計(jì)了空投過(guò)程評(píng)價(jià)表,形成基于模型的空投任務(wù)的試飛設(shè)計(jì)及飛行品質(zhì)評(píng)估技術(shù),結(jié)果表明提出的基于模型的試驗(yàn)設(shè)計(jì)方法及飛行品質(zhì)評(píng)價(jià)方法可以有效保障空投任務(wù)執(zhí)行,并全面充分評(píng)價(jià)空投任務(wù)下的飛行品質(zhì)。
猜你喜歡
青少年科技博覽(中學(xué)版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學(xué))(2020年12期)2021-01-18 06:15:26
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學(xué)版)(2020年2期)2020-05-21 03:35:16
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
