基于BIM+GIS的室內外三維一體化系統設計與實現
2024-05-27 13:58:13廖菊燕
科技資訊 2024年1期
廖菊燕
關鍵詞: 三維一體化 BIM GIS 仿真原型系統
中圖分類號: TP274 文獻標識碼: A 文章編號: 1672-3791(2024)01-0018-04
由于數據源的限制,3D GIS 創建的3D 場景通常使用抽象的幾何對象(如點、線、面、體等)來表示真實世界。通過強調外部和地面空間信息的表達,可以對外部和地面環境的功能和物理空間關系進行宏觀空間分析。然而,由于建筑內部缺乏詳細準確的空間數據,3D GIS 創建的3D 場景將保留在外部,難以模擬和表達室內和地下空間的空間環境[1]。
近年來,建筑信息建模(Building Information Modeling,BIM)技術發展迅速。在建筑設計和施工的各個階段,利益相關方共同努力,完善項目信息,形成建筑項目通用的動態資源庫,為BIM 項目提供一致的建筑與設施信息。BIM 模型已成為工程設計中精確設計和施工的重要數據源。三維模型中的空間數據是三維GIS 的重要數據源,具有信息的準確性和語義的豐富性。它也是構建高精度GIS 內部和地下環境的有效數據源。BIM 和GIS 的結合解決了3D GIS 中內部環境數據不足的問題,允許從宏觀到微觀、從外部到內部、從地面到地下的綜合空間環境的一體化建模和表達[2]。
1 原型系統設計
1.1 需求分析
本文的目的是通過開發一個可視化場景的原型系統和相應的分析應用程序,探索BIM+GIS 中集成的內部和外部3D 場景的構建。
(1) 室內和室外場景的集成3D 可視化允許從用戶角度進行交互式漫游,同時通過點擊節點結構快速切換到場景。
(2) 場景中的空間單元與相關屬性信息的實現有關。通過交互實現建筑的空間查詢和相關信息查詢,用戶可以在場景中使用鼠標自由選擇所需的目標,也可以通過選擇節點自由組合它們。同時,還支持對相關信息進行實時編輯和修改[3]。
(3) 通過交互對場景進行實時建模和編輯。即通過選擇場景位置的參考點(如中心、線、面等)并調整相應的參數,對相應的空間單元(如街道、管線等)進行參數建模。同時,還支持場景地形變化和實時傾斜攝影測量數據。
(4)相關的分析應用程序。通過將BIM 建筑模型與GIS 場景相結合,可以反映內外部場景之間相對準確的空間關系,并可以對相應空間中的視覺區域和緩沖區域進行空間分析,實現對內外部空間和時間集成等特定場景相關應用的支持。
本文開發了一個基于坐標定義、幾何表達和語義映射的BIM+GIS 集成數據模型,并將BIM 模型的參數構建與多分辨率地形和傾斜攝影測量模型的方法相結合。通過使用BIM+GIS 建模設計和開發內外部系統,實現了集成三維建模場景的可視化,并在此基礎上實現了相關分析應用。
1.2 系統框架
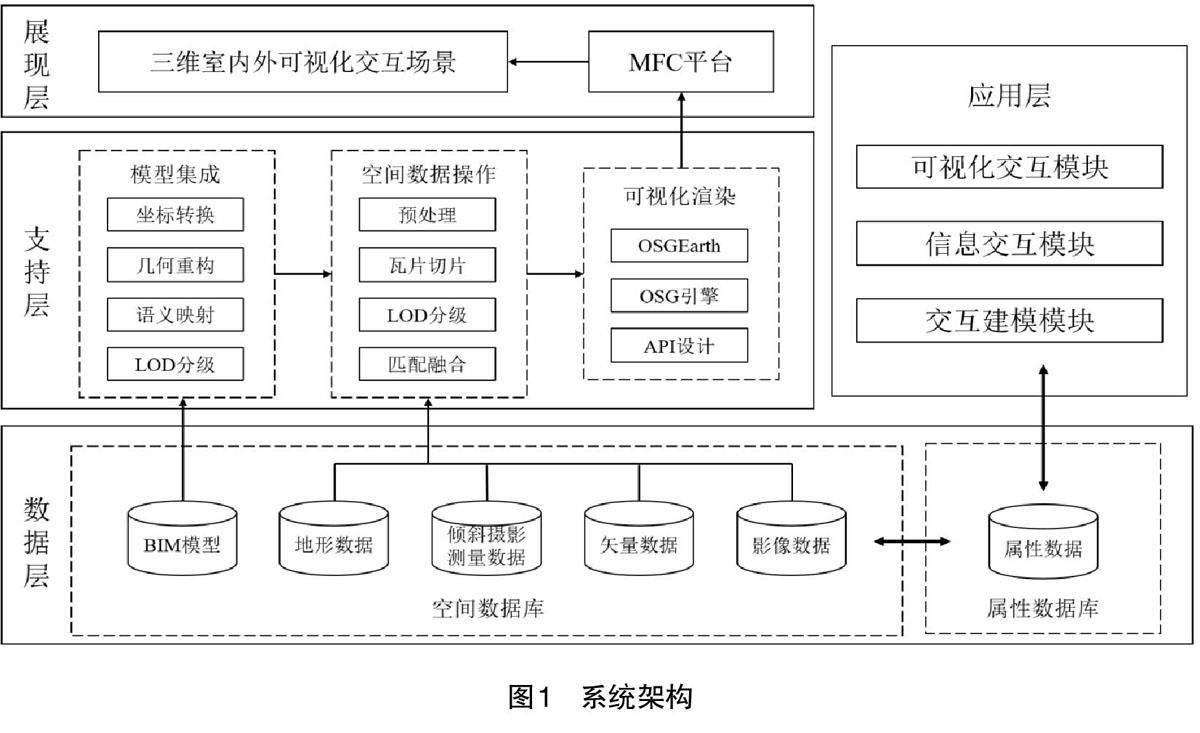
BIM+GIS 是一個基于OSG 渲染引擎和OSGEarthSDK 的三維可視化平臺,基于C++語言二次開發。為了簡化數據管理,提高三維場景渲染的效率,系統使用C/S 架構。數據通過服務器管理,客戶端負責數據調用、計算和數據集成[4]。系統架構如圖1 所示。
數據層包括空間數據庫、地形數據、傾斜攝影測量數據、矢量數據、影像數據和用于管理相關屬性的數據庫,其中空間數據庫包括BIM 模型。空間數據庫和屬性數據庫實現空間數據和屬性信息的完整映射。
支持層包括3 種關鍵集成技術:模型集成、空間數據操作和可視化渲染。首先,BIM 模型的集成為空間數據的集成與融合提供了數據基礎;其次,構建地形、攝影測量、矢量和空間圖像的多維空間金字塔,與集成BIM-GIS 數據模型進行融合與集成;最后,使用OS‐GEarth SDK 訪問空間金字塔中的瓦片節點,可以使用OSG 引擎進行相應的API 設計和可視化實現。
應用層主要通過MFC 應用框架實現4 個系統應用模塊,使可視覺化交互、信息交互、交互建模及應用分析成為可能。
系統各層獨立,支持層間標準化接口,便于系統維護和擴展。
2 基于傾斜攝影測量的3D GIS 場景的制作
通過傾斜攝影測量技術,可以獲取目標區域的圖像,同時通過其他傳感器獲取與飛機位置相關的POS信息。
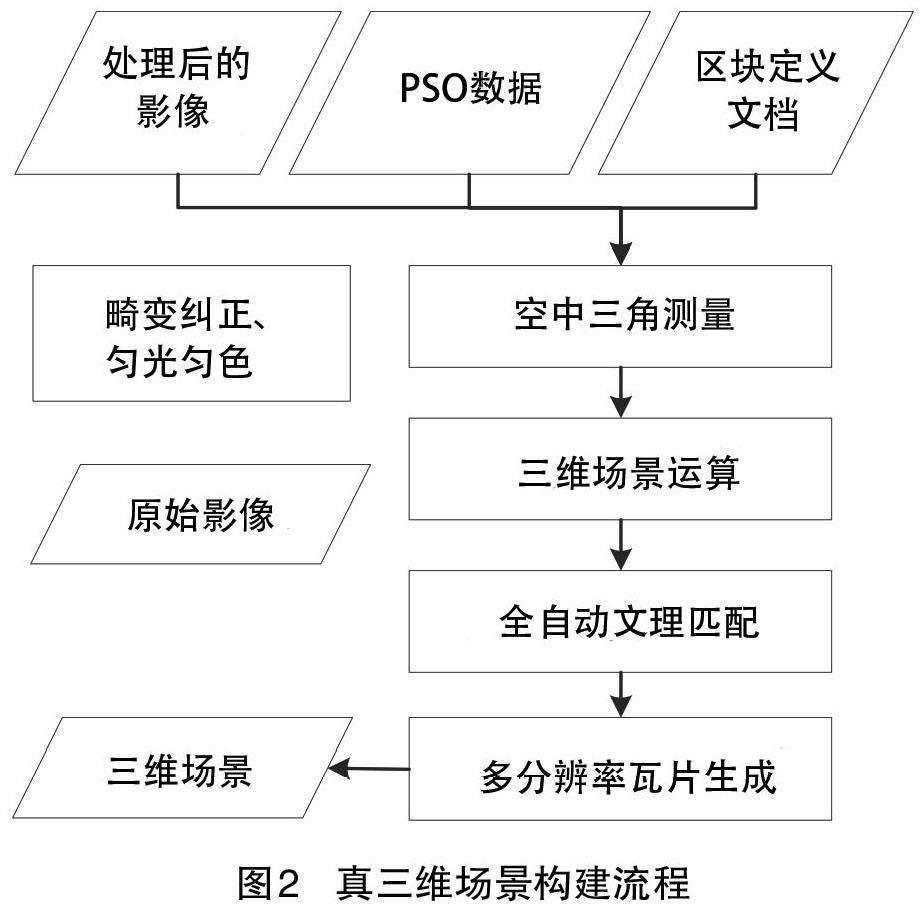
目前,Smart 3D 軟件的主要應用是傾斜攝影測量數據的處理。Smart 3D 是一款可以從視頻和照片中生成真實三維模型的軟件[5]。整個場景的設計過程如圖2 所示。
2.1 三維實景模型創建
三維實景模型的創建,主要包括空中三角測量、基于GPU 的三維場景運算、全自動紋理匹配。空中三角測量的基本思想就是根據影像重疊區域的像點坐標與真實像控點坐標以及影像與真實地形的關系來解算影像的外方位元素和加密點的坐標。目前,空中三角測量已經實現了流程的高度自動化,通過模式識別技術與多視影像匹配技術來進行傳統作業中人為進行的選點與轉點操作,對像點坐標實現自動獲取,之后使用區域網平差程序進行解算,最終得出加密點在既定坐標系下的空間位置與影像的精確定向參數[6]。首先對POS 信息進行加密,通過區域網平差對粗差較大的點進行刪除或修改,反復進行平差運算直到精度達到要求,最后得出每張圖像的外方位元素。基于GPU 的三維場景運算主要是通過對空中三角測量的結果使用圖像匹配方法,同時利用GPU 的并行加速對三維場景進行運算,從而得到基于真實影像的超高密度點云的數字表面模型(Digital Slope Model,DSM)。
逼真的3D 模型創建主要包括空中三角測量、基于GPU 的3D 場景操作和全自動紋理調整。空中三角測量即基于真實圖像的圖像點和控制點的坐標計算圖像的外部方向元素和加密點坐標,并將圖像連接到真實地形。利用多圖像匹配技術代替以往工作中選點和轉點手動操作,從而實現圖像點坐標的自動檢索。加密POS 信息,并刪除或修改區域網平差中較大的區域差異,反復重復此步驟,直到精度達到所需水平,最后得出每幅影像的外部方向元素。基于GPU 的三維場景計算主要使用來自空中三角測量結果的圖像匹配方法,利用GPU 并行加速計算三維場景,得到了基于真實圖像的數字表面模型。
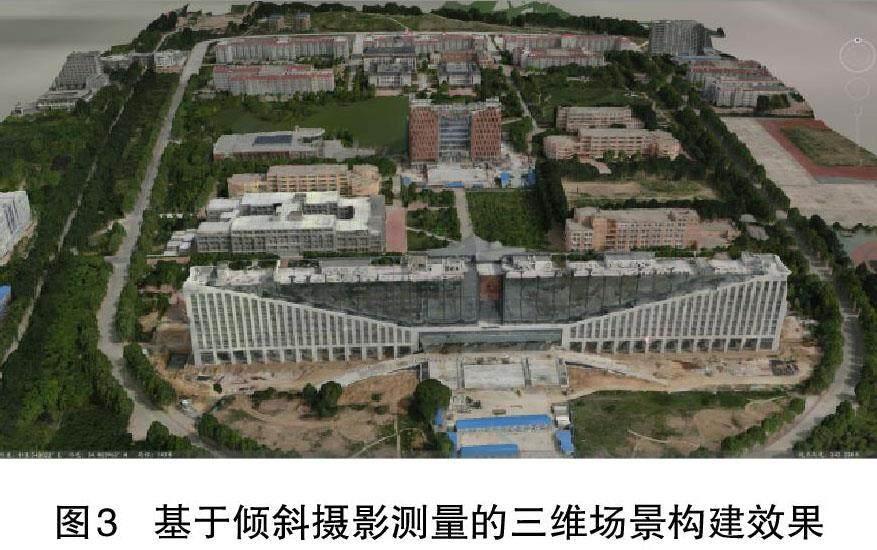
2.2 多分辨率瓦片生成
對于范圍過大的三維重建模型,考慮到對計算機內存的較高要求,有必要對其創建一個多分辨率系統。目前,3D 瓦片分割技術得到了廣泛應用。該模型分為多個瓦片,可以自由定義3D 場景的顯示區域,這也有助于深入分析場景的空間過程。圖3 顯示了使用傾斜攝影測量構建3D 場景的最終效果。
在多個三維重建模型中,需要創建一個多分辨率系統來滿足計算機內存的嚴格要求。目前,三維飛行控制技術已經得到了廣泛應用。使用多個瓦片模型,可以自由控制三維場景區域并簡化場景的空間分析。
3 BIM和GIS的融合路線
由于BIM 模型中的數據量很大,很難在3D 場景中直接顯示。需要做LOD 多級處理,將空間幾何圖形和屬性轉換為高分辨率GIS 數據,以集成BIM 和GIS 數據處理。在處理BIM 數據轉換后,還需要將3D 場景與GIS 相結合,并在3D 場景中進行顯示。加載BIM 模型后,必須將其與從地形和側面攝影測量中恢復的3D 模型數據合并。由于一些BIM 數據提供了參數數據,因此無法將其作為模型直接導入GIS 平臺,還需要對參數進行建模以形成能夠以3D 顯示的3D 模型。本文提供了BIM 和GIS 之間的合并路徑,如圖4 所示。
4 原型系統實現
4.1 系統界面
原型系統的界面如圖5 所示,其中,主窗口為三維場景的可視化窗口,其他菜單面板采用按鍵呼出與隱藏的方式,這樣既能夠保持界面的簡潔,同時也能夠使用戶將注意力集中到三維場景上。
4.2 交互建模模塊
交互建模模塊主要允許用戶在三維場景中進行相關要素建模,同時該模塊還支持實時對三維場景的地形與傾斜攝影測量數據做出修改。系統支持對場景中地形數據的修改,通過用戶對需要修改范圍的框選,同時設置修改的參數而實現場景的編輯。圖6 是對水庫平面的整平處理的場景編輯圖。
4.3 分析應用模塊
分析應用模塊主要包括基于三維場景的基本空間分析,以及針對特定場景的空間規劃和輸出。測量功能主要包括坐標定位、可視判斷、距離、面積測量等。坐標定位是通過輸入實際坐標的經度、緯度或空間坐標,快速定位場景并簡化目標搜索的功能。
5 結語
隨著城市的發展,人們在室內的時間越來越多。無論是日常生活還是反恐救險,室內都逐漸成為人類活動的主要場所。本文介紹了BIM+GIS 原型建模系統的室內外設計與應用。首先,須進行需求分析,主要配置包括數據層、支撐層、顯示層、應用層的原型系統結構。其次,從視覺交互、信息交互、交互建模、分析和應用這4 個方面介紹系統的功能。最后,使用特定的案例推演復雜的內部和外部任務。