基于機載LiDAR 點云數據的地形級實景三維建設實踐
2024-06-26 11:25:06鄧興張國清崔衛磊馬子俊
電腦知識與技術 2024年13期
鄧興 張國清 崔衛磊 馬子俊

摘要:根據國家實景三維建設大綱的技術指導,實景三維建設的具體內容和生產工藝等已得到進一步的明確。全國各地試點均積極投入實景三維建設的實踐。結合技術大綱的要求,通過實踐,文章利用貴陽市中心城區1:1000機載Li?DAR點云數據生產1m×1m高精度數字高程模型(DEM) ,同時結合數字線劃數據自動進行單體建模,最后融合存量正射影像數據(DOM) ,構建貴陽市中心城區三千平方千米的基礎版地形級實景三維模型。以此構建的地形級實景三維成果完全滿足技術大綱的基本要求,內容豐富,精度可靠,具有實踐與借鑒意義。
關鍵詞:機載激光雷達;實景三維;數字高程模型;正射影像;單體化白模
中圖分類號:TP3 文獻標識碼:A
文章編號:1009-3044(2024)13-0100-03 開放科學(資源服務)標識碼(OSID) :
0 引言
實景三維是對人類生產、生活和生態空間進行真實、立體、時序化反映和表達的數字虛擬空間,是國家新型基礎設施建設的重要組成部分[1]。實景三維由空間數據體、物聯感知數據和支撐環境三部分構成,其中空間數據體包括了地理場景和地理實體[1-2]。實景三維建設涵蓋的內容豐富,本文涉及的地理場景成果主要包括高精度數字高程模型(DEM) 、正射影像(DOM) 及單體化白模,是地形級實景三維成果的一部分。本文闡述了利用1:1000機載LiDAR點云數據生成高精度DEM 和單體化模型,同時融合正射影像數據(DOM) ,形成基礎版地形級實景三維成果。這項工作是在利用機載LiDAR點云數據生成高精度DEM和單體化白模自動建模方面進行探索,另一方面也是進行實景三維建設的生產實踐。
1 建設思路
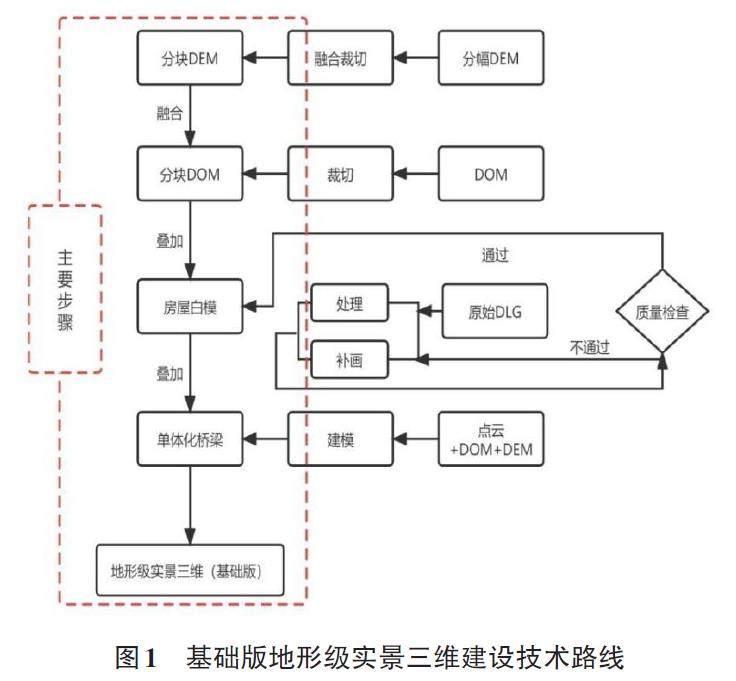
根據地形級實景三維建設的目標,本文中的建設流程可分解為5個步驟:1) 點云數據預處理:包括冗余數據的消除、數據濾波、點云分區分塊、數據分層分類、點云拼接、數據優化等;2) 特征點、線提取:在預處理點云數據的基礎上,采集帶有高程信息的特征線(也稱斷裂線),如:建筑物邊線、道路邊線等;3) 構造三角網(TIN) 、生產DEM:利用分類后的地面點高程、特征點(線),構建不規則三角網(TIN) ,并內插生成1m×1m格網的DEM成果數據[3];4) 構建單體化白模:利用存量數字線劃數據結合激光點云數據實現自動或半自動化建模,制作單體化白模成果;5) 生產基礎版地形級實景三維:融合生成的高精度DEM、存量正射影像數據及單體化白模,構建貴陽市中心城區三千平方千米的基礎版地形級實景三維成果[4]。技術路線如圖1所示。
2 建設內容
2.1 點云數據處理
本文利用1:1000激光點云數據,經檢測平均點云密度為8.5點/m2、點云高程中誤差為0.35m,點云數據覆蓋范圍約3 000平方千米。
2.1.1 基準轉換及分塊
把原始點云數據轉換成平面坐標系統為2000國家大地坐標系、投影方式為高斯-克呂格投影的點云數據;通過全區均勻分布的控制點,計算出測區內高程異常值的模型,將高程系統擬合到1985國家高程基準上,再按照分幅框生成對應的分塊,然后根據分塊的邊界將點云自動裁切,并按照圖幅名稱對應到分塊中,以便數據瀏覽和項目生產[5]。
2.1.2 點云數據自動濾波及分類
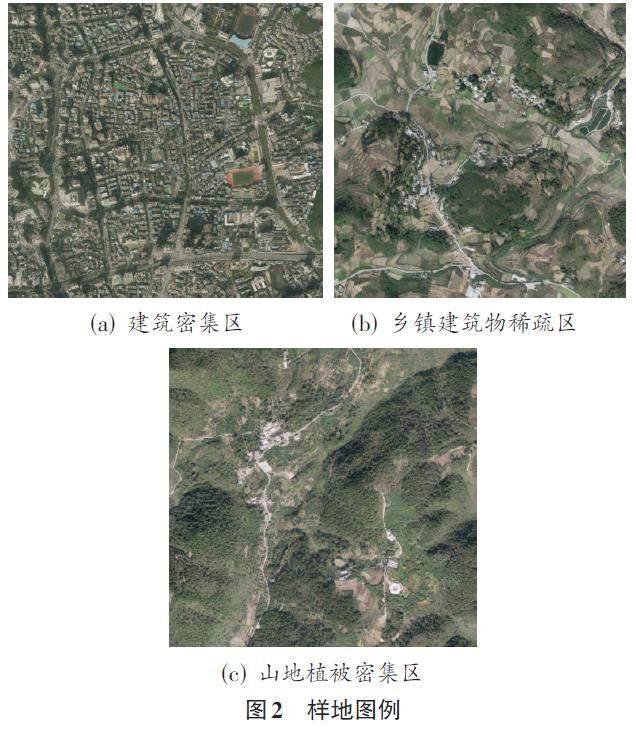
利用點云處理專用軟件,對點云數據進行逐塊濾波分類,以區分出地面點和噪點等類別。根據本區域的特點,自動濾波區域可劃分為以下樣地類型:市區建筑密集區、郊區廠房密集區、鄉鎮建筑物稀疏區、郊區農田密集區、丘陵植被密集區以及山地植被密集區等[6-7]。示例如圖2所示。
2.1.3 點云數據手動分類
對自動分類的成果,使用LiDAR點云數據處理系統,參照已有影像數據或衛星影像數據進行手動分類濾波,獲得用于制作高精度的DEM的分類點云數據。同時按照1:1000比例尺DEM生產制作工藝要求、成果標準和數據表達內容,將點云數據進行分類。點云數據分類如表1所示,其中地面點用于生成DEM。
2.1.4 特殊點云分類方法及分類后點云接邊
對于高程突變的區域,我們需通過調整參數或算法,對小面積區域重新進行自動分類;對于分類錯誤的點,需進行重新分類。在分類過程中,應以點云切剖面為主要依據,而將影像作為輔助參考。在處理較為平滑、直線型的區域時,可以適當放大剖面寬度;然而,在拐角處,尤其是立交橋、高架公路等接地與架空的臨界區域,為確保精確度,切剖面的寬度應盡量縮小[3,7]。
為了保證模型接邊處地形過渡自然,應利用Li?DAR點云數據處理系統加載圖幅結合表,隨后使用接邊工具進行點云接邊,并合理設置接邊寬度,軟件自動載入周邊圖幅設置寬度范圍內的數據。若遇到大面積水域時,接邊寬度的設置可根據實際情況適當放寬。
2.2 高精度DEM 制作
目前,DEM成果的獲取方法主要包括:基于地面平臺的數字化地面測量;航空和衛星平臺攝影測量與遙感等。數字化地面測量往往耗時費力;衛星遙感雖能獲取大區域DEM,但精度較低;航空攝影測量則對于植被覆蓋區域DEM的獲取具有一定困難。利用激光點云數據生成DEM作為本次使用的一種手段,其在獲取植被覆蓋區域的高精度DEM有著其他手段無可比擬的優勢。激光點云數據在進行濾波分類后,能有效去除植被、建筑物等地物信息并獲取真實的地面點信息,進而生成高精度高分辨率的DEM成果。
本次DEM 制作是在分類點云數據中提取地面點,再在地面點中完成兩步重要過程,即地面點漏洞區域的發現與補測、特征線的采集,在此基礎上進行高精度DEM制作。
2.2.1 特征線采集
根據實際情況,采集帶有高程信息的特征線參與DEM生成。如:建筑物邊線、道路邊線、橋梁邊線、河流邊線、面狀水域范圍線等,在勾畫水域邊線時以模型最低點高程為準[5,7]。如果點云數據無法獲取高程時,需要補測高程信息,對于不能滿足DEM產品精度要求的數據范圍也需要補測高程信息。
2.2.2 構建不規則三角網(TIN) 生成DEM
點云數據經過上述處理后,在LiDAR點云數據處理系統中利用已完成分類的點云中所有地面點層、人工補測點和人工勾繪的帶有高程信息的各類特征線,自動構建生成TIN。利用TIN,按照1米采樣間隔內插,高程值取位至0.01米,無效值設為-9999,自動生成1米規則格網的DEM成果,格式均為TIFF格式,并包含同名TFW文件。最后以圖幅為單位、外擴20m導出DEM。
2.3 單體化白模制作
建筑物單體化是本次地形級實景三維建設的一部分,主要以白模形式表達。單體化建模主要是通過數字線劃數據與激光點云數據實現自動或半自動化處理,制作單體化白模成果。
2.3.1 建筑模型自動投影
基于數字線劃數據,在海量點云數據組織管理的基礎上,對點云數據和數字線劃數據進行綜合分析,快速索引模型平面內的點云數據,采用點云分割、三角網構建等數據組織方法分析點云空間分布,計算模型平面方程,快速高效地自動將二維線劃成果轉化為三維模型成果。其中,點云分割算法是點云三維重建中的基礎算法也是關鍵算法,基于法向量和距離約束的平面分割方法對原始點云進行分割,根據LiDAR點云二維距離特征,對種子點周圍點云進行區域增長,分割出不同的建筑物屋頂面信息,利用最小二乘計算屋頂面法向量、分析平面距離得到建筑物屋頂面拓撲關系。例如:一般房屋的矢量模型體現為矩形,投影后模型結構為規則的長方體。通過點云數據信息獲取房屋及地面高度,以地面高度為投影平面,用投影的方式自動生成以線劃圖房屋邊界為模型側面的三維模型。如圖3為一般房屋和簡單房屋模型效果圖。
2.3.2 橋梁單體化
DEM和DOM數據融合后,涉及橋梁處的原始影像會形成塌陷,為保證地理場景的美觀,要對原始橋梁處影像進行處理,使其與周圍地物紋理相適。同時對橋梁進行單體化處理,使其不出現拉花的情況。具體步驟包括根據數字正射影像對橋梁的外側邊界進行勾畫,確定橋梁邊界;根據激光點云確定橋梁的高度;根據確定的橋梁平面與高程信息,利用DPModeler軟件對橋梁進行單體化制作,使最終的效果更接近橋梁實景的真實表達。
3 基礎版地形級實景三維建設
在上述成果建設的基礎上,對存量DOM進行整理,利用整理后的DOM數據成果、DEM數據成果和白模成果構建地形緩存數據,最終融合地形緩存數據和優化后的橋梁數據形成基礎版地形級實景三維成果[8]。
基礎版地形級實景三維成果的地形緩存數據由DOM和DEM數據生成[1,4],具體工作中,第一步對DOM 進行數據檢查,包括對數據投影、影像色彩、接邊情況等進行檢查;第二步按照數據所屬投影帶分塊;第三步結合DOM、DEM數據,去除邊界外的無效區域;第四步導入單體化數據,檢查疊合情況;最后生成地形緩存及最終成果輸出,如圖4所示。
4 結束語
自然資源部關于加快測繪地理信息事業轉型升級更好支撐高質量發展的意見中指出,到2025年,實景三維中國建設將取得階段性成果;到2030年,實景三維中國將全面建成[2,9]。本文利用1:1000 機載Li?DAR點云數據為基礎,結合存量數字線劃圖及正射影像數據(DOM) ,構建地形級實景三維建設實踐,驗證了實景三維中國建設技術大綱的可行性,并從中探索到了可靠的技術路徑,總結了符合地方特色的技術經驗,為實景三維建設在貴州山區加快推進提供了參考經驗。
參考文獻:
[1] 自然資源部辦公廳. 實景三維中國建設技術大綱(2021版).自然資辦發〔2021〕56 號[EB/OL]. (2021-08-11) [2024-01-22]. http://gi. mnr. gov. cn/202108/t20210816_2676831. html.
[2] 自然資源部. 實施三維中國建設總體實施方案(2023-2025年). 自然資發[2023]31號[EB/OL]. (2023-03-03) [2024-01-22]. https://www. doc88. com/p-67216534798972. html.
[3] 楊輝山,雷麗珍. 機載LiDAR點云獲取與高精度DEM建設關鍵技術探討[J]. 測繪通報,2019(3):124-127.
[4] 馬紅. 大范圍多源多尺度實景三維模型建設及應用研究:以重慶市實景三維模型建設為例[J]. 測繪通報,2019(S2):61-64.
[5] 國家測繪地理信息局. 機載激光雷達數據處理技術規范.CH/T 8023-2011[EB/OL]. (2011-11-15) [2024-01-22]. https://www. doc88. com/p-8062967763751. html.
[6] 楊必勝,梁福遜,黃榮剛. 三維激光掃描點云數據處理研究進展、挑戰與趨勢[J]. 測繪學報,2017,46(10):1509-1516.
[7] 王道杰,陳倍,孫健輝. 機載LiDAR點云密度對DEM精度的影響[J]. 測繪通報,2022(5):140-144,169.
[8] 劉潤東. 實景三維新型測繪能力建設及典型應用[J]. 測繪與空間地理信息,2017,40(8):159-161.
[9] 自然資源部. 關于加快測繪地理信息事業轉型升級更好支撐高質量發展的意見. 自然資發〔2023〕158[EB/OL]. (2023-08-22)[2024-01-22]. https://www. gov. cn/zhengce/zhengceku/202308/content_6899855. htm.
【通聯編輯:代影】
