基于Wi-Fi 的移動目標角度估計算法研究
2024-06-26 11:43:34田利平李維弦
電腦知識與技術 2024年13期
田利平 李維弦

摘要:考慮到MUSIC算法在實際應用場景中,因為相干和分辨力低而無法滿足實際需要。文章提出了一種基于信號空間分解的動態,靜態信號分離算法。充分分析了人體運動,產生的反射信號之間的相干性,該算法將信號協方差矩陣特征空間分解后,最大特征值和其對應的特征矢量形成的空間為靜態信號空間,其余的為動態信號空間。再用信號空間的MUSIC算法來估計靜態路徑信號和動態路徑信號的到達角。通過仿真實驗和真實環境驗證了文章算法的有效性。
關鍵詞:CSI;特征值;AOA;TOF;相干
中圖分類號:TP311 文獻標識碼:A
文章編號:1009-3044(2024)13-0127-05 開放科學(資源服務)標識碼(OSID) :
0 引言
準確的估計信號的波達方向,一直是通信領域研究的熱點問題。例如在軍事領域,需要準確探測敵方飛行器的方向;在老人和小孩的監護方面可以通過他們的運動方向實現準確定位,從而實施精準的救護措施。最早的到達角的估計是使用機械掃描的方式,需要花費大量的時間,而且準確度不高。波束形成算法[1]是最早的到達角估計算法。這種算法主要是利用空域的陣列信號,代替時域傅里葉變換的時域信號。該局限性在于入射信號的角度差小于波束寬度時,該算法就完全失效(等同于傅里葉變換的限制)。要想增加分辨力,即需增加陣列信號的孔徑,這無疑會增加成本。因為空間信號的到達角估計與時域頻率估計非常類似,所以時域頻率估計的非線性算法被推廣而成為空間信號的到達角估計,例如最大熵法[2]和最小方差法[3]。這些方法雖然叫作高分辨譜估計方法,但是它們假定信號源在空間中是連續分布的,但實際中這樣的假設是不成立的。針對以上問題,文獻[4]提出的多重信號分類MUSIC)算法,它是空間譜(M估ult計ipl的e 一Sig次na飛l 躍Cla,s它sif打ica破tio了n,瑞利限,實現了超高分辨率的角度估計,而且充分利用了信號的統計特性。它主要利用信號的協方差矩陣,進行特征分解,得到信號空間和噪聲空間,利用信號空間和噪聲空間的正交性,得到針狀譜峰,從而大大提高了算法的分辨力。利用MUSIC算法或者特征空間的信號到達角估計算法成為研究熱點。
室內定位技術已在多個領域得到發展和應用,2017年其商業利潤達到100億美元[5]。例如,它可以幫助定位醫院中的患者并診斷抑郁癥、躁狂癥等。在兒童的家庭護理和監督中,它可以用來調節異常行為。在大型倉庫中,它可以定位貨物和貴重物品。在工業區發生突發災害時,還能幫助救援人員及時找到被困人員。因此,各種室內定位技術被開發出來。例如,基于藍色線齒的室內定位技術已經被提出[6-7],盡管其應用通常僅限于十米左右的小范圍。利用超聲波的室內定位技術已在文獻[8-9]中提出。但室內多徑對定位精度影響較大,且超聲波易受環境溫度和多普勒效應影響。超寬帶技術也已用于室內定位[10-11],但其成本相對較高,尚未得到廣泛應用。基于RFID 的室內定位技術也已有描述[12-14],但其抗干擾能力通常較差。隨著Wi-Fi信號的普及,利用它們進行室內定位已經得到研究和開發[15-17]。Wi-Fi定位和跟蹤算法可以分為兩種類型。第一種是主動定位或跟蹤,例如 SpotFi[18]、Wicapture [19] 和 Milliback [20],但它們需要人們隨身攜帶設備,不方便。第二種技術是無源定位或跟蹤。主要有兩種被動跟蹤算法:(1) 基于指紋的跟蹤算法;(2) 基于參數的室內跟蹤算法。基于指紋的跟蹤算法提前收集大量樣本并用它們來訓練算法。它們需要大量的能量和資源。CSI-MIMO[21]利用CSI 信號的幅度和相位信息構建指紋數據庫從而實現定位。Chen等人[22]為了用Wi-Fi設備實現厘米級的精度,提出了一種基于時間反轉的指紋算法室內定位算法,它充分利用了多輸入多輸出(MIMO)Wi-Fi算法的空間多樣性,獲得比Wi-Fi 信道更寬的有效帶寬。Pinloc[23]是一種基于CSI 信號的概率局部定位算法。該算法的原理:CSI信號在每個地點都不是完全隨機。文獻[24]考慮到基于接收信號強度RSS測出的距離估計容易受到多徑效應的影響,而提出了一種新的方法FILA,利用信道狀態信息(CSI)在接收端建立傳播模型并用指紋識別算法實現定位。MonoPHY[25]僅用單Wi- Fi鏈路采集的CSI信號的幅度,使用極大似然概率估計算法,在面積約100平方米的典型公寓中的35個不同位置構建整個區域的指紋數據。隨著人工智能與深度學習的發展,很多研究人員將深度學習應用于指紋定位,得到了較好的結果[26-31]。但是由于傳統的指紋定位算法受環境影響較大,室內家具位置改變、空氣的溫度、濕度、窗戶的關閉狀態均會影響CSI信號,而這些因素一旦發生變化,就需重新采集指紋數據,這將花費大量人力物力。為了應對環境變化引起的指紋退化的問題,許多學者采用了基于參數估計的室內定位算法。
Widar2.0[32]使用了不同天線的CSI信號的共軛相乘來得到動態路徑,再使用極大似然算法的AOA,TOF,多普勒速度,幅度聯合估計,可以得到較為準確的角度信息,但該算法不能遮擋直射路徑,否則算法失效。Dynamic-music[33]通過分析了人體運動時,動態路徑和靜態路徑之間的相干性,提出了靜態路徑會合并為一條。即先使用MUSIC算法,再把動態路徑找出來。但是由于人體運動過程中軀干部分反射的信號之間是相干的,所以認為動態路徑之間是不相干的說法是不正確的。而MUSIC算法對相干信號是完全失效的。MUSIC算法在實際信噪比較低的情況下,角度分辨力很低,動態路徑和靜態路徑的角度會合并成一個而無法區分。如果可以把靜態路徑信號和動態路徑信號分開處理,那么上述問題迎刃而解。在很多種情況下,我們只需要研究感興趣的信號。例如,在軌跡跟蹤過程中,我們希望得到由人體運動產生的信號,而對于地面,家具,墻壁等的反射信號一般與動態信號是比較難分離的。在OFCW雷達感知識別過程,通常要用到CFAR,其主要通過相鄰時間窗內,信號變化的大小去除靜態信號。但由于Wi-Fi信號頻率較低,且用于通信的Wi-Fi信號會對CSI造成干擾,所以若用CFAR類似的算法,很難實現。為了解決上述問題,我們提出了一種新的動態路徑和靜態路徑的到達角估計算法。該算法可以在被動狀態下,準確提取目標反射信號的角度,而且在動態路徑相干的情況下也可以識別。該算法將信號協方差矩陣特征空間分解后,最大特征值和其對應的特征矢量形成的空間為靜態信號空間,其余的為動態信號空間。再用信號空間的MUSIC算法來估計靜態路徑信號和動態路徑信號的到達角。在仿真和真實的環境下,均有較好的效果。
1 理論基礎
1) 靜態路徑之間是相干的,因為不同的反射路徑之間只差一個復常數。
2) 人在走路時,動態路徑之間如果來自同一個身體部位(如頭和軀干)的反射信號,因為它們的移動速度是相同的,所以是相干的(所以之前北大的Dy?namic_music的動態路徑是非相干的理論是錯的)。
3) 人在走路時,動態路徑之間如果來自胳膊和腿,它們的速度通常是軀干的兩倍,所以與軀干之間的反射信號是非相干的(因為軀干占身體比例的大部分,所以認為動態路徑既有相干信號也有非相干信號)。
2 本文主要方法
窄帶遠場信號的數學模型為:
X (t) = As(t) + N (t)
其中,X (t) 為接收信號,A 為天線陣列的導向矢量,s(t) 為信號矩陣,N (t),信號的協方差矩陣的無偏估計為:
將上式代入得:R = E (X ? XH ) = AE (S ? SH )AH + E (N ? NH ),式中E 為信號的期望。
根據空間譜估計理論,信號可分為信號空間和噪聲空間:R = UΣUH = Us ΣsUsH + UN ΣNUNH。
我們又將信號空間分為靜態信號空間和動態信號空間:R = UDΣDUDH + ULΣLULH + UN ΣNUNH。
因為靜態路徑間只相差復常數,所以,靜態路徑之間是相干的,所以用MUSIC算法估計信號到達角時,會合并為一條【參考Dy-music】。信號協方差的特征值表示不同路徑的信號的功率大小。所以對于信號空間的特征值的最大的為靜態信號(因為在LOS路徑無遮擋的情況下,靜態路徑是最強的)。剩余的N-1, 為動態信號。即:
所以靜態路徑的到達角為: PMUSIC (θ靜) = aH (θ )ULU HL a(θ ) 來計算譜函數,通過尋求峰值來得到波達方向的估計值。
動態路徑的到達角為: PMUSIC (θ動) = aH (θ )UDU HD a(θ ) 來計算譜函數,通過尋求峰值來得到波達方向的估計值。
但是CSI只有三根天線,最多只能識別兩條路徑。對于典型的室內信號有6~8條,三根天線是遠遠不夠的。每個天線有30個子載波,所以用不同子載波的對不同路徑TOF引起的相位偏差來擴展天線。
第l 條路經在相鄰不同天線引入的引起的相位偏移為d sin(θl )/c。具體過程如圖1所示。
第l 條傳播路徑相對于天線1,在第M 個天線的相移:-2πf (M - 1)d sin(θl )/c
即:
Φ(θ ) = e-j2πd (M - 1)sin(θl ) × f/c
第l 條路經信號由天線引起的信號的導向矢量為:
第l 條路經在相鄰不同子載波引入的引起的相位偏移為:2π( fi - fi + 1 )τl
第l 條傳播對于等間隔OFDM子載波,第1條路徑的飛行時間τl 在第n 個子載波處相對于天線的第一個子載波引入了2π(n - 1) fδ τl 的相移,其中fδ 是兩個連續子載波之間的頻率間隔,即:
Φ(τl ) = e-j2π(n - 1) × fδ τl
第l 條路經信號由子載波和天線共同引起的信號的導向矢量為:
即可用上面得到的導向矢量代入公式MUSIC算法的公式來估計靜態路徑和動態路徑的角度。
3 仿真實驗
為了驗證本文算法的有效性,實驗數據包括五個角度:theta=[-28° -26° 0° 4° 20°];其中-28°和-26°為相干的靜態路徑。0°和4°為相干的動態路徑。20°為非相干的動態路徑。靜態路徑的強度比較大(本文實驗中,靜態路徑強度設為動態路徑的2倍)。
從圖2中可看出,MUSIC算法對相干信號完全失效,只檢測到20°的一個信號。
相干的靜態路徑(-28°和-26°為相干的靜態路徑)合并為1條。如圖3所示。
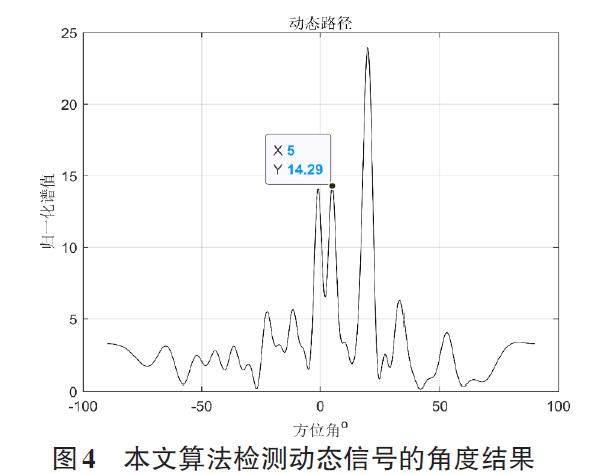
如圖4所示,得到的動態路徑的角度與原始設置的動態路徑角度一致,而且可以實現相干信號的角度估計。0°和4°為相干的動態路徑。20°為非相干的動態路徑。
4 實際環境驗證
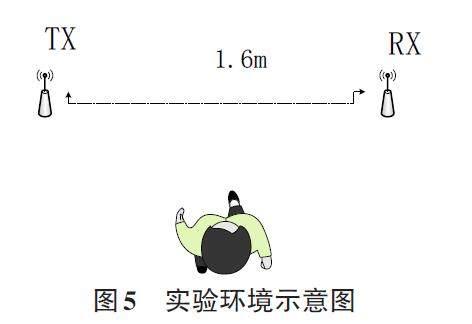
為了驗證該算法的有效性。沒有人的情況下采集了多組數據,用MUSIC算法得到靜態路徑的信號到達角,如圖5所示。其中TX為Wi-Fi發送設備,RX為Wi-Fi接收設備,之間的間距為1.6米。然后人拿金屬錫紙站在與天線直接連線平行的位置(相距一米)左右移動的情況,若使用上述動態和靜態路徑分離算法結果如下:
靜態路徑的到達角譜圖如圖7所示。從圖中可看出靜態路徑結果與沒有人時結果一致。與圖6 結果一致。
動態路徑的到達角譜圖如圖8所示:動態路徑也與人在10°到80°的范圍一致。
5 結論
提出了一種基于信號空間分解的動態,靜態信號分離算法。充分分析了人體運動,產生的反射信號之間的相干性,該算法將信號協方差矩陣特征空間分解后,最大特征值和其對應的特征矢量形成的空間為靜態信號空間,其余的為動態信號空間。再用信號空間的MUSIC算法來估計靜態路徑信號和動態路徑信號的到達角。通過仿真實驗和真實環境驗證了本文算法的有效性。
【通聯編輯:李雅琪】
基金項目:福建省教育廳青年科研項目(項目編號:JAT190011)
