基于5G技術(shù)的校園無人車配送系統(tǒng)設(shè)計與實施研究
2024-06-26 13:21:44馬永紅魏敏敏
物流科技 2024年11期
馬永紅 魏敏敏

摘 ?要:文章以青島職業(yè)技術(shù)學院為案例,基于5G技術(shù)設(shè)計了校園無人車配送系統(tǒng)。通過勘察和數(shù)據(jù)采集確定了配送需求和路徑,并設(shè)計了無人車控制系統(tǒng),實現(xiàn)自主行駛和環(huán)境感知。采用基于5G的通信模塊實現(xiàn)與服務器的實時通信,通過仿真和優(yōu)化,建立了系統(tǒng)原型,并進行了實地測試。結(jié)果表明,該系統(tǒng)能高效、安全地提高校園內(nèi)配送效率和服務質(zhì)量,對未來校園無人車配送系統(tǒng)具有重要參考價值。
關(guān)鍵詞:5G技術(shù);校園無人車;配送系統(tǒng);路徑規(guī)劃;仿真
中圖分類號:F252.14文獻標志碼:ADOI:10.13714/j.cnki.1002-3100.2024.11.015
Abstract: This study takes Qingdao Vocational and Technical College as a case and designs a campus unmanned vehicle delivery system based on 5G technology. By conducting site surveys and data collection, the delivery requirements and feasible paths within the campus are determined. A control system for unmanned vehicles is designed to achieve autonomous driving, path planning, and environmental perception. The system incorporates a 5G-based communication module for real-time communication and data exchange between unmanned vehicles and servers. Simulation software is utilized to simulate and optimize the campus unmanned vehicle delivery system. Furthermore, a prototype of the system is developed and tested on-site using real scenarios and data. The test results demonstrate that the 5G-based campus unmanned vehicle delivery system efficiently and safely improves delivery efficiency and service quality within the campus. This research provides valuable insights for future studies and applications of campus unmanned vehicle delivery systems.
Key words: 5G technology; campus autonomous vehicles; delivery system; path planning; simulation
1 ?研究背景與問題陳述
5G(第五代移動通信技術(shù))是指一種新一代的移動通信技術(shù)標準,是4G標準的升級版。它是一種高速、低延遲、高可靠性和大容量的無線通信技術(shù),可以實現(xiàn)超高速的移動數(shù)據(jù)傳輸和實時視頻傳輸。與4G相比,5G技術(shù)在傳輸速度、延遲、網(wǎng)絡容量和網(wǎng)絡連接等方面都有很大的提升。5G技術(shù)的理論峰值傳輸速度可以達到每秒20Gbps,延遲可以降到1毫秒以下,網(wǎng)絡容量也可以大幅提高,從而支持更多的設(shè)備連接和數(shù)據(jù)傳輸。5G技術(shù)的廣泛應用將會帶來許多新的應用場景,例如智能家居、自動駕駛、工業(yè)物聯(lián)網(wǎng)等。
1.1 ?5G技術(shù)的優(yōu)勢
(1)高速傳輸:5G技術(shù)的傳輸速度是4G的數(shù)倍,可以實現(xiàn)高速數(shù)據(jù)傳輸和實時視頻傳輸。
低延遲:5G技術(shù)的延遲時間非常短,可以實現(xiàn)實時通信和控制,滿足校園無人車配送系統(tǒng)對低延遲的要求。
(2)大容量:5G技術(shù)的網(wǎng)絡容量大,可以支持更多的設(shè)備連接和數(shù)據(jù)傳輸,滿足校園無人車配送系統(tǒng)的多設(shè)備接入需求。
(3)高可靠性:5G技術(shù)采用了多重技術(shù),包括基站間的冗余和網(wǎng)絡切換等,可以提高網(wǎng)絡的可靠性和魯棒性。
1.2 ?目前校園配送系統(tǒng)存在的問題
(1)人工調(diào)度困難:傳統(tǒng)的校園配送系統(tǒng)需要人工調(diào)度,需要大量人力資源,且容易出現(xiàn)調(diào)度不當、效率低下等問題。
(2)配送效率低下:傳統(tǒng)的校園配送系統(tǒng)無法實現(xiàn)自動化配送,無人車配送系統(tǒng)可以提高配送效率。
(3)安全隱患:無人車技術(shù)的發(fā)展還不成熟,需要解決安全隱患等問題,例如無人車與行人、其他車輛的安全交通問題等。
(4)技術(shù)成本高:無人車配送系統(tǒng)的技術(shù)成本相對較高,需要投入較多的資金和人力資源進行研發(fā)和實現(xiàn)。
2 ?系統(tǒng)設(shè)計與技術(shù)路線
校園智慧物流系統(tǒng)主要包括無人配送系統(tǒng)的規(guī)劃與設(shè)計、無人配送設(shè)備的選擇、無人配送路徑的規(guī)劃、訂單分派問題等,基于青島職業(yè)技術(shù)學院的規(guī)模和現(xiàn)實情況,選擇無人車配送是最佳的,本文聚焦于校園無人車配送系統(tǒng)的規(guī)劃設(shè)計和技術(shù)路線兩個問題開展研究。
2.1 ?校園無人車配送系統(tǒng)架構(gòu)
2.1.1 ?無人車模塊
該模塊是整個系統(tǒng)的核心部分,包括無人車的導航、避障、路徑規(guī)劃、定位和控制等功能。
(1)車載計算機
無人配送車配備的車載計算機,一般采用PLC或者單片機,它是無人配送車前進方向指令與運動邏輯的發(fā)源地,接收并執(zhí)行上級控制樞紐傳送過來的指令信息。
(2)導航設(shè)計
目前的導航技術(shù)原理效率各不相同,為了不同的場景給無人配送車選擇合適的導航技術(shù)是必要的,目前無人小車使用的導航技術(shù)多為直接坐標導航技術(shù)、電磁導航技術(shù)、激光導航技術(shù)、視覺導航技術(shù)、北斗導航技術(shù)等。
(3)無人配送車裝載容量設(shè)計
圖1為無人配送車車體圖,車體兩邊都可以安裝智能取貨快件箱,車體的半部分長1.2m,寬0.5m,車體載重200kg。
(4)無人配送車取貨端設(shè)計
采用二維碼掃碼取貨技術(shù),用戶使用移動終端即手機端對其進行掃描進行開箱操作;用戶拿走貨物將箱門關(guān)閉,計算機獲取關(guān)閉信息,進行下一地點配送。無人車通過激光雷達、相機、GPS等傳感器實時感知周圍環(huán)境,并根據(jù)預設(shè)的路徑規(guī)劃和控制算法自主導航。
2.1.2 ?通信模塊
該模塊通過5G網(wǎng)絡與無人車進行通信,實現(xiàn)無人車和服務器之間的數(shù)據(jù)傳輸和通信控制。無人車需要安裝5G通信模塊,以便能夠通過5G網(wǎng)絡與服務器進行通信。服務器需要設(shè)置5G通信接口,以便能夠與無人車進行通信,無人車通過5G通信模塊與服務器建立連接,并發(fā)送需要傳輸?shù)臄?shù)據(jù)。服務器接收無人車發(fā)送的數(shù)據(jù),并對其進行處理和分析,服務器根據(jù)處理結(jié)果生成相應的命令,通過5G通信接口向無人車發(fā)送命令。無人車接收到服務器發(fā)送的命令后,執(zhí)行相應的操作,例如改變行駛速度、方向、停止等。
通信模塊需要具備低延遲、高可靠性和高帶寬等特點,以保證系統(tǒng)的實時性和穩(wěn)定性。
2.1.3 ?配送中心模塊
該模塊是系統(tǒng)的管理中心,主要負責無人車的任務調(diào)度、路徑規(guī)劃、車輛監(jiān)控和數(shù)據(jù)管理等功能。
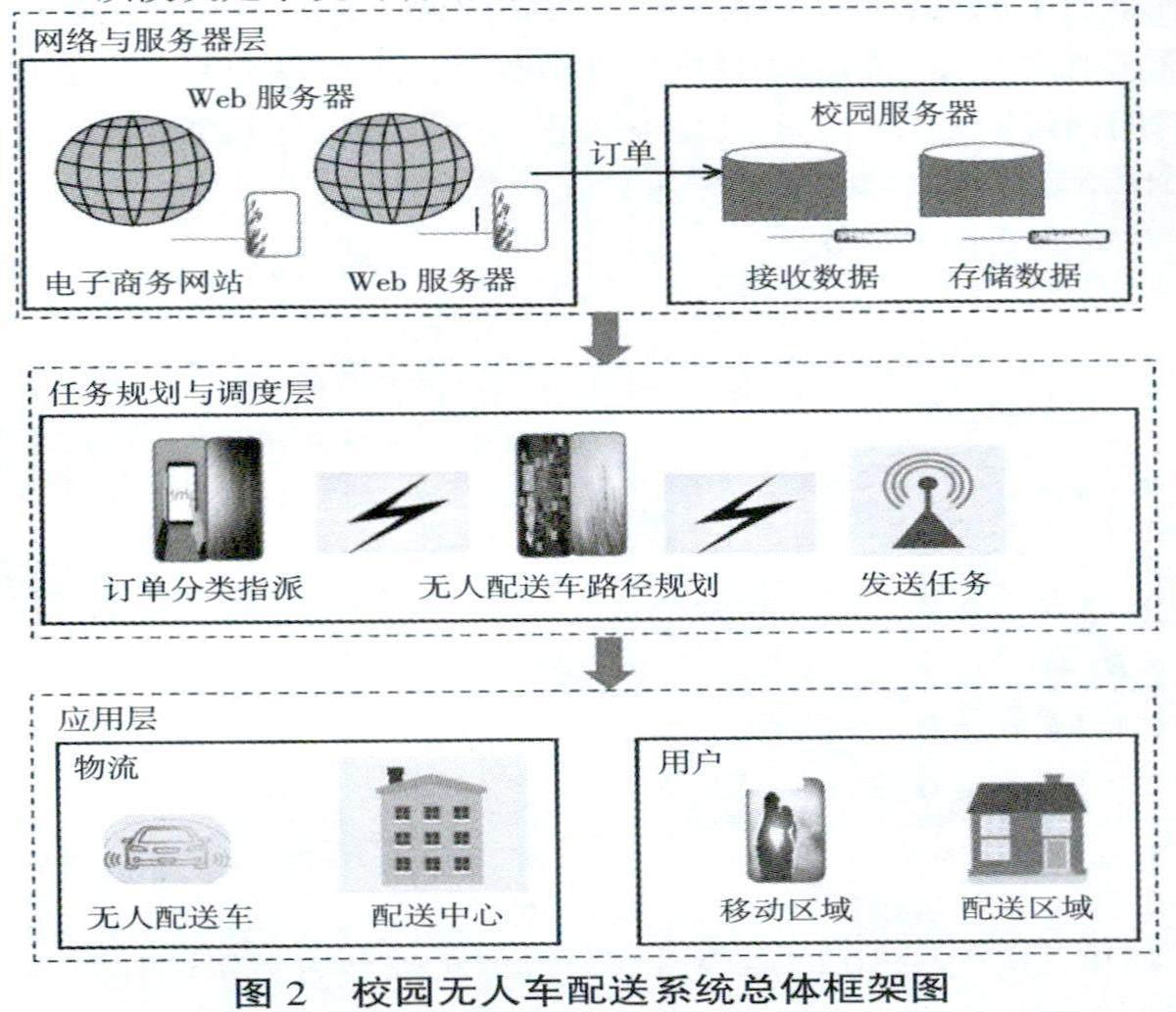
本文將針對校園獨有的特點,研究校園無人配送系統(tǒng)總體構(gòu)成。建立校園無人配送整體框架,將該系統(tǒng)分為網(wǎng)絡與服務器層、任務規(guī)劃與調(diào)度層、應用層三個層次。然后規(guī)劃設(shè)計了校園無人配送系統(tǒng)所需的硬件設(shè)備,著重設(shè)計了無人配送車的部分硬件方案。如圖2所示。
(1)網(wǎng)絡與服務器層
網(wǎng)絡與服務器共有兩部分組成,分別對應兩大功能輸入信息和接收與存儲信息。
(2)任務規(guī)劃與調(diào)度層
任務規(guī)劃與調(diào)度層,主要是軟件層也是算法層,屬于整個系統(tǒng)的大腦,它處理外部數(shù)據(jù),指揮后續(xù)進程。
(3)應用層
主要體現(xiàn)在物流階段和用戶收貨階段。物流階段主要應用體現(xiàn)在配送中心擁有存儲貨物、訂單處理、分揀、裝載和指揮調(diào)度的功能;用戶收貨階段體現(xiàn)在收貨人與無人配送車之間的人機交互,完成收貨的過程。
配送中心模塊需要實時獲取無人車和用戶的數(shù)據(jù)信息,并根據(jù)用戶需求和交通狀況等因素進行任務調(diào)度和路徑規(guī)劃。
2.1.4 ?用戶終端模塊
該模塊是用戶接口,用戶可以通過APP、網(wǎng)站等方式提交訂單、查詢配送進度和評價服務等。用戶終端模塊需要提供友好的界面和便捷的操作,以提高用戶體驗和滿意度。
2.1.5 ?充電站模塊
由于無人車需要進行充電,所以系統(tǒng)需要建設(shè)充電站來保障無人車的正常運行。充電站需要根據(jù)無人車的電量和位置等信息進行智能調(diào)度和管理,以保證無人車能夠及時充電并維持運行。
以上是校園無人車配送系統(tǒng)的基本架構(gòu),具體實現(xiàn)可能還需要結(jié)合具體的場景和需求進行優(yōu)化和定制化。設(shè)計基于5G技術(shù)的校園無人車配送系統(tǒng),包括系統(tǒng)架構(gòu)、通信協(xié)議、傳感器設(shè)備等,并確定系統(tǒng)實現(xiàn)的技術(shù)路線。
2.2 ?校園無人車配送系統(tǒng)的技術(shù)路線主要內(nèi)容
2.2.1 ?無人車導航和定位技術(shù)
無人車需要具備自主導航和定位的能力,才能夠準確地完成任務。無人車導航和定位技術(shù)可以采用激光雷達、相機、GPS等傳感器進行實時感知和定位,同時還需要結(jié)合SLAM(Simultaneous Localization and Mapping)算法進行建圖和路徑規(guī)劃。
2.2.2 ?無人車避障技術(shù)
為了保證無人車在行駛過程中的安全,需要對障礙物進行檢測和避讓。無人車避障技術(shù)可以采用激光雷達、相機等傳感器進行環(huán)境感知,并結(jié)合避障算法進行實時避讓。
2.2.3 ?無人車控制技術(shù)
無人車需要進行精確的控制,以保證其行駛的穩(wěn)定性和安全性。無人車控制技術(shù)可以采用PID控制算法或者模型預測控制算法等方法,實現(xiàn)無人車的精準控制。
2.2.4 ?5G通信技術(shù)
5G技術(shù)可以提供低延遲、高帶寬和高可靠性的通信服務,為校園無人車配送系統(tǒng)提供了良好的通信基礎(chǔ)。無人車和服務器之間的通信可以采用5G通信技術(shù)進行實時傳輸和控制。
2.2.5 ?任務調(diào)度和路徑規(guī)劃技術(shù)
校園無人車配送系統(tǒng)需要根據(jù)用戶需求和交通狀況等因素進行任務調(diào)度和路徑規(guī)劃,以最優(yōu)化地完成配送任務。任務調(diào)度和路徑規(guī)劃技術(shù)可以采用A*算法、Dijkstra算法等方法進行優(yōu)化。
2.2.6 ?用戶終端技術(shù)
用戶終端可以采用APP、網(wǎng)站等方式提供用戶接口,以方便用戶提交訂單、查詢配送進度和評價服務等。用戶終端技術(shù)需要提供友好的界面和便捷的操作,以提高用戶體驗和滿意度。
3 ?系統(tǒng)建模與仿真
3.1 ?校園無人車配送系統(tǒng)建模
3.1.1 ?符號定義
(1)索引與集合
O為派送訂單,O∈0,0為所有未配送訂單集合;μ為無人配送車,μ∈U,U為無人配送車輛集合。
(2)模型參數(shù)
每一個訂單O存在三個屬性,x表示訂單配送坐標,t表示訂單期望配送時間,h表示訂單貨物的大小,h=1表示該訂單為大型貨物,否則h=0;d為訂單i到訂單j的距離;B為每個無人配送車擁有的大型貨物快件箱數(shù)目,B為每個無人配送車擁有的小型貨物快件箱的數(shù)目;T為當前的送貨時間段,且每段時間內(nèi)每輛無人配送車只配送一趟;c≥1為超時懲罰系數(shù);若x>0,sgnx=1,否則sgnx=0。μ=1表示選用第i個配送車進行配送,否則μ=0。
(3)決策變量P=1表示若車輛μ運送訂單o后繼續(xù)運送訂單o,否則P=0。
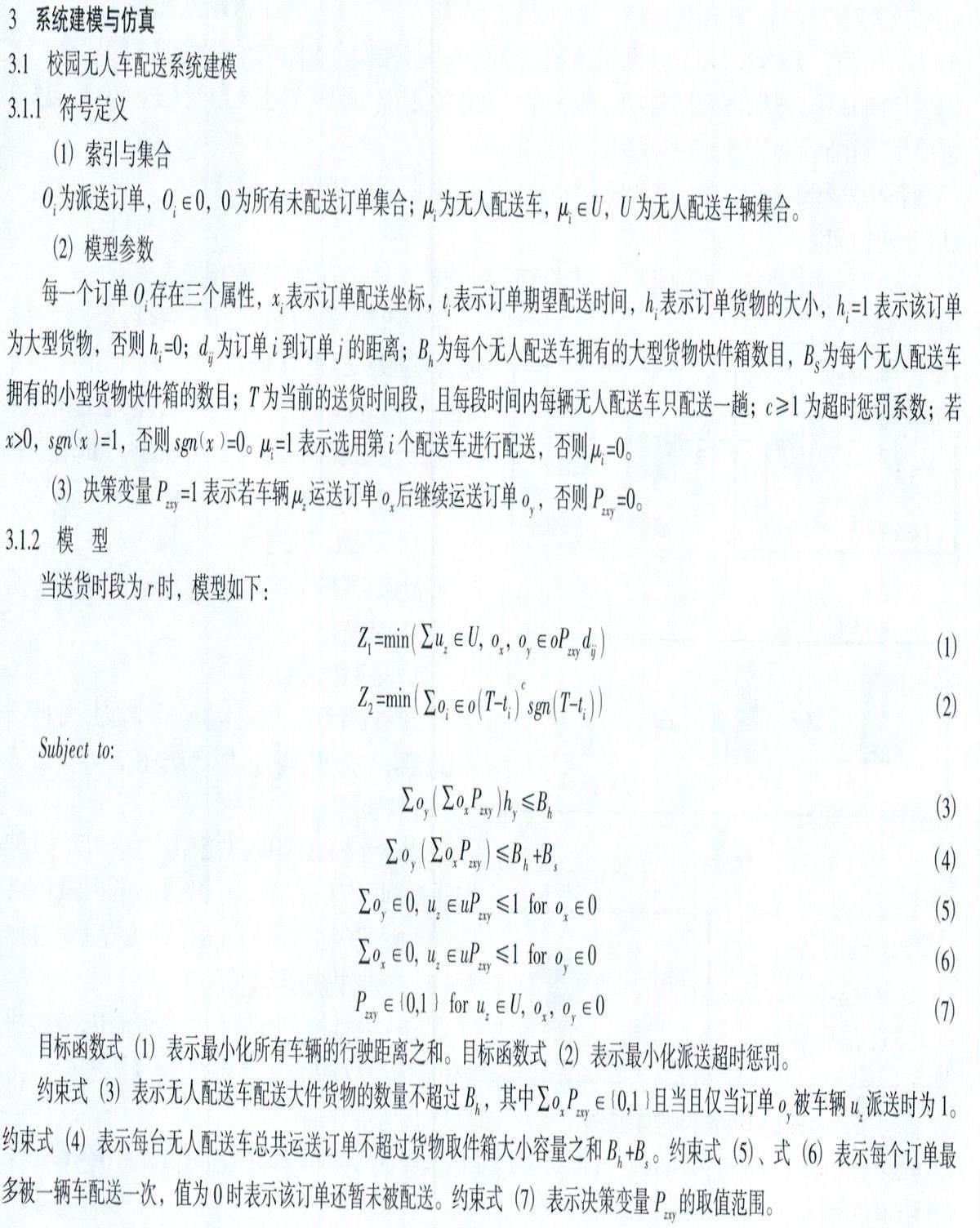
3.1.2 ?模 ?型
當送貨時段為r時,模型如下:
P∈0,1 for u∈U, o, o∈0 (7)
目標函數(shù)式(1)表示最小化所有車輛的行駛距離之和。目標函數(shù)式(2)表示最小化派送超時懲罰。
約束式(3)表示無人配送車配送大件貨物的數(shù)量不超過B,其中∑oP∈0,1且當且僅當訂單o被車輛u派送時為1。約束式(4)表示每臺無人配送車總共運送訂單不超過貨物取件箱大小容量之和B+B。約束式(5)、式(6)表示每個訂單最多被一輛車配送一次,值為0時表示該訂單還暫未被配送。約束式(7)表示決策變量P的取值范圍。
3.2 ?校園無人車配送系統(tǒng)仿真
校園無人車配送系統(tǒng)仿真可以采用一些仿真軟件進行,如MATLAB、Simulink、V-REP等。具體仿真過程如下:
環(huán)境建模:通過仿真軟件建立校園無人車配送系統(tǒng)的環(huán)境模型,包括校園道路、建筑物、交通規(guī)則等。
車輛建模:建立無人車的模型,包括車體、傳感器、控制系統(tǒng)等,通過仿真軟件對車輛進行仿真。
任務建模:建立校園內(nèi)的任務模型,包括任務的數(shù)量、類型、位置等,通過仿真軟件對任務進行仿真。
系統(tǒng)控制建模:建立校園無人車配送系統(tǒng)的控制模型,包括任務調(diào)度、路徑規(guī)劃、避障控制等,通過仿真軟件對系統(tǒng)進行仿真。
仿真運行:將任務分配給無人車進行配送,通過仿真軟件模擬無人車的行駛過程,觀察無人車是否能夠效果和性能。
仿真結(jié)果分析:通過仿真軟件輸出仿真結(jié)果數(shù)據(jù),分析校園無人車配送系統(tǒng)的性能指標,如任務完成率、配送時間、能耗等。
優(yōu)化設(shè)計:根據(jù)仿真結(jié)果分析,對校園無人車配送系統(tǒng)的設(shè)計進行優(yōu)化,包括無人車的數(shù)量、配送路線、控制策略等。
通過仿真,可以模擬實際環(huán)境下的校園無人車配送系統(tǒng),減少了開發(fā)過程中的試錯成本,優(yōu)化了系統(tǒng)設(shè)計,并且能夠提供量化的性能指標,為系統(tǒng)的實現(xiàn)和部署提供了依據(jù)。
4 ?系統(tǒng)實施與測試
在校園內(nèi)建立系統(tǒng)原型,測試系統(tǒng)的各項功能和性能,分析系統(tǒng)的可行性和可靠性,完善系統(tǒng)設(shè)計。
4.1 ?建立校園無人車配送系統(tǒng)原型步驟
4.1.1 ?確定系統(tǒng)需求
根據(jù)校園實際情況和需求,確定系統(tǒng)的功能、性能和安全等要求。
4.1.2 ?選取無人車型號
根據(jù)校園無人車配送系統(tǒng)的需求,選擇合適的無人車型號。
4.1.3 ?搭建物理模型
根據(jù)無人車的型號,選擇相應的底盤、電機、傳感器等組件,搭建出無人車的物理模型。
4.1.4 ?開發(fā)控制軟件
根據(jù)校園無人車配送系統(tǒng)的需求,開發(fā)控制軟件,實現(xiàn)路徑規(guī)劃、避障控制、任務調(diào)度等功能。
4.1.5 ?部署無人車配送系統(tǒng)
將搭建好的無人車和開發(fā)好的控制軟件進行整合,部署在校園內(nèi),進行測試和調(diào)試。
4.1.6 ?測試和優(yōu)化
對部署好的無人車配送系統(tǒng)進行測試和優(yōu)化,包括無人車的運行穩(wěn)定性、配送效率、能耗等指標。
通過建立校園無人車配送系統(tǒng)原型,可以測試系統(tǒng)的功能和性能,驗證控制軟件的正確性和有效性,并對無人車配送系統(tǒng)進行優(yōu)化和改進,提高系統(tǒng)的可靠性和實用性。
4.2 ?校園無人車配送系統(tǒng)可行性分析
校園無人車配送系統(tǒng)的可行性分析主要從技術(shù)、經(jīng)濟、社會等方面進行分析。
4.2.1 ?技術(shù)可行性分析
隨著5G技術(shù)的發(fā)展和無人車技術(shù)的成熟,校園無人車配送系統(tǒng)的技術(shù)可行性得到了保證。現(xiàn)有的5G網(wǎng)絡和傳感器技術(shù)能夠支持無人車的實時通信和避障控制,同時無人車技術(shù)在實際應用中也得到了驗證,證明了技術(shù)的可行性。
4.2.2 ?經(jīng)濟可行性分析
校園無人車配送系統(tǒng)能夠提高配送效率,減少人工成本,降低能耗,對校園管理和運營成本也有積極的影響。雖然初期投資較大,但長期運營收益可觀,因此從經(jīng)濟角度來看,校園無人車配送系統(tǒng)的可行性得到了保證。
4.2.3 ?社會可行性分析
校園無人車配送系統(tǒng)不僅能夠提高配送效率,減少人力資源浪費,還可以減少交通擁堵和環(huán)境污染等社會問題。同時,校園無人車配送系統(tǒng)還可以為校園內(nèi)的學生和教職工提供更加便利和高效的服務,因此從社會角度來看,校園無人車配送系統(tǒng)的可行性也得到了保證。
綜上所述,校園無人車配送系統(tǒng)在技術(shù)、經(jīng)濟和社會等方面均具備可行性,但需要充分考慮系統(tǒng)的實際應用場景和需求,進行系統(tǒng)設(shè)計和優(yōu)化,以提高系統(tǒng)的實用性和可靠性。
5 ?案例分析與應用
在校園內(nèi)選取一定的區(qū)域,進行實際的應用測試,分析系統(tǒng)在實際應用場景下的表現(xiàn)和優(yōu)化方案。
本文以青島職業(yè)技術(shù)學院為案例,設(shè)計了一套基于5G技術(shù)的校園無人車配送系統(tǒng),并對其進行了仿真和系統(tǒng)原型建立。該校園無人車配送系統(tǒng)旨在提高校園內(nèi)的配送效率和服務質(zhì)量,同時減少人力和能源成本。
首先,進行了場地勘察和數(shù)據(jù)采集,以確定校園內(nèi)的配送需求和可行的無人車路徑。然后,設(shè)計了一套無人車控制系統(tǒng),實現(xiàn)無人車的自主行駛、路徑規(guī)劃和環(huán)境感知等功能。在無人車控制系統(tǒng)中,采用了基于5G技術(shù)的通信模塊,實現(xiàn)無人車與服務器之間的實時通信和數(shù)據(jù)交互。
其次,利用仿真軟件對校園無人車配送系統(tǒng)進行了仿真,并對系統(tǒng)進行了優(yōu)化。在仿真中,考慮了各種因素,如無人車的速度、配送任務的優(yōu)先級和時限、路線規(guī)劃等,以評估系統(tǒng)的性能和效果。
最后,利用校園內(nèi)的實際場景和數(shù)據(jù)建立了校園無人車配送系統(tǒng)的原型,并進行了實地測試和調(diào)試。測試結(jié)果表明,基于5G技術(shù)的校園無人車配送系統(tǒng)能夠在校園內(nèi)高效、安全地進行各種配送任務,有效地提高了校園內(nèi)的配送效率和服務質(zhì)量。
綜上所述,基于5G技術(shù)的校園無人車配送系統(tǒng)在青島職業(yè)技術(shù)學院的實際應用中具有很大的應用前景。通過本文,得出了一些結(jié)論和啟示,如加強系統(tǒng)的安全性和隱私保護措施、提高無人車的智能化和自主化水平、優(yōu)化系統(tǒng)的配送策略等,這些啟示對于未來校園無人車配送系統(tǒng)的研究和應用都具有重要的參考價值。
6? 結(jié)論與展望
本文基于5G技術(shù),設(shè)計了一套校園無人車配送系統(tǒng),并進行了仿真和系統(tǒng)原型建立。通過系統(tǒng)的建模和仿真,發(fā)現(xiàn)基于5G技術(shù)的校園無人車配送系統(tǒng)能夠顯著提高校園內(nèi)的配送效率和服務質(zhì)量,同時減少人力和能源成本,對校園的運營管理和環(huán)保方面都有積極的影響。同時,本文也發(fā)現(xiàn)當前校園無人車配送系統(tǒng)面臨的主要問題包括技術(shù)成熟度不高、安全性和隱私保護問題等。因此,需要加強技術(shù)研究和優(yōu)化,提高無人車的智能化和自主化水平,加強安全和隱私保護措施,以確保系統(tǒng)的安全穩(wěn)定運行。
展望未來,本文認為基于5G技術(shù)的校園無人車配送系統(tǒng)具有廣闊的應用前景。隨著5G技術(shù)的不斷發(fā)展和普及,無人車的技術(shù)和應用場景也將越來越豐富,校園無人車配送系統(tǒng)也將逐步普及和應用。同時,無人車技術(shù)也將逐步向著智能化和自主化方向發(fā)展,為校園內(nèi)的各種配送和服務提供更加高效、便利和安全的解決方案。
參考文獻:
[1] 高瑩. 區(qū)塊鏈在5G技術(shù)及其他領(lǐng)域的最新研究綜述[D]. 鄭州:鄭州輕工業(yè)大學,2022.
[2] 汪洋,孫劍. 菜鳥驛站無人配送車物流路徑規(guī)劃算法實證研究[J]. 物流科技,2022,45(16):24-26.
[3] 潘霞,謝蓉,張慶余. 自動駕駛在無人配送領(lǐng)域的應用研究[J]. 科技風,2022(18):4-6.
[4] 王慧. 基于車聯(lián)網(wǎng)系統(tǒng)的智能物流配送系統(tǒng)研究[J]. 自動化技術(shù)與應用,2022(1):144-147.
[5] 郭佳涵. 新零售背景下生鮮電商物流現(xiàn)狀——以H公司為例[J]. 中國物流與采購,2022(22):75-76.
[6] 成爽. 基于邊緣計算的無人機多目標任務調(diào)度群智能優(yōu)化方法[D]. 南京:南京郵電大學,2022.
[7] 沈躍,劉子涵,劉慧,等. 基于多約束條件的果園噴霧機器人路徑規(guī)劃方法[J]. 農(nóng)業(yè)機械學報,2023(7):56-67.
[8] 宋紫陽,李軍懷,王懷軍,等. 基于路徑模仿和SAC強化學習的機械臂路徑規(guī)劃算法[J]. 計算機應用,2024(2):439-444.
收稿日期:2023-05-27
基金項目:中國物流學會2022年課題項目“基于5G技術(shù)的校園無人車配送系統(tǒng)設(shè)計與實施研究”(2022CSLK03-122)
作者簡介:馬永紅(1975—),女,山東菏澤人,青島職業(yè)技術(shù)學院商學院,教授,碩士,研究方向:智慧物流與供應鏈管理、職業(yè)教育;魏敏敏(1984—),女,山東肥城人,青島職業(yè)技術(shù)學院商學院,講師,碩士,研究方向:高等教育管理、思政教育。
引文格式:馬永紅,魏敏敏. 基于5G技術(shù)的校園無人車配送系統(tǒng)設(shè)計與實施研究[J]. 物流科技,2024,47(11):60-63,80.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
兒童故事畫報(2018年9期)2018-10-23 19:25:02
南方周末(2018-06-28)2018-06-28 08:11:04
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
琴童(2017年3期)2017-04-05 14:49:04
小天使·二年級語數(shù)英綜合(2017年3期)2017-04-01 17:17:48