一種電機直驅操動機構行程曲線規劃方法
2024-06-30 00:00:00王瀟吳旭升肖曦
電機與控制學報 2024年5期


摘 要:電機直驅操動機構過控制電機按照行程曲線運行,直接驅動高壓開關實現分合閘動作。針對電機直驅操動機構行程曲線缺乏系統性規劃方法,無法與機構運行特性相匹配,規劃、驗證及優化周期長,可移植性差等問題,結合多項式模型與負載特性模型提出一種電機直驅操動機構行程曲線規劃方法。根據運動學和動力學分析,建立電機直驅操動機構負載特性數學模型。利用多項式模型生成行程曲線簇,并結合電機直驅操動機構及高壓開關特性建立多目標優化算法,篩選出最佳行程曲線。仿真和實驗結果表明,所提方案可以實現電機直驅操動機構及高壓開關的穩定、可靠運行,與傳統的行程曲線規劃方法相比,可以實現10.3%的能耗優化,能夠進一步提升控制系統整體功率密度。
關鍵詞:高壓開關;操動機構;電機;行程曲線;曲線規劃;多項式模型
DOI:10.15938/j.emc.2024.05.000
中圖分類號:TP13文獻標志碼:A
A kind of motor direct-drive operating mechanism travel curve planning method
WANG Xiao WU Xusheng XIAO Xi2
(1.School of Electric and Engineering, Naval University of Engineering, Wuhan 430034, China; 2.Department of Electrical Engineering, Tsinghua University, Beijing 100084, China)
Abstract:The motor direct-drive operating mechanism directly drives the high-voltage circuit breaker to realize the opening and closing actions by controlling the motor to run according to the travel curve. Aiming at the lack of a systematic planning method for the travel curve of the direct-drive operating mechanism, which cannot match the operating characteristics of the mechanism, has a long planning, validation and optimization period, and has poor portability, a travel curve planning method for the direct-drive operating mechanism is proposed by combining the polynomial model and the load characteristic model. Based on the kinematics and dynamics analysis, a mathematical model of the load characteristics of the direct-drive operating mechanism is established. The polynomial model is used to generate travel curve clusters, and a multi-objective optimization algorithm is established by combining the characteristics of the motor direct-drive operating mechanism and the high-voltage circuit breaker to screen out the optimal travel curves. Simulation and experimental results show that the proposed scheme can achieve stable and reliable operation of the motor direct-drive operating mechanism and high-voltage circuit breaker, and compared with the traditional travel curve planning method, it can optimize the energy consumption by 10.3%, which can further improve the overall power density of the control system.
Keywords:high-voltage circuit breaker; operating mechanism; motor; travel curve; curve planning; polynomial modeling
0 引 言
電機直驅操動機構是一種采用電機作為驅動源的新型操動機構,具有傳動架構簡單、零部件少、實時性強、數字化程度高等特點,結合伺服技術高動態響應、高控制精度等特點,進一步提升了高壓斷路器的動態性能[1-3]。
在高壓斷路器發展的不同時期,操動機構的形式也有所不同。永磁操動機構通過改變磁場方向及大小實現分合閘操作,分合閘速度快,零部件數量少。利用永磁體提供磁力,使斷路器維持在分合閘位置的可靠性大大提高,但動作過程中速度可控性差[4-5]。彈簧操動機構依靠彈簧實現斷路器的分合閘操作,完全依賴于機械結構,具有大量零部件,傳動結構復雜且故障率高,出力特性與斷路器的負載特性匹配性差[5-6]。液壓操動機構利用液壓油作為傳動介質,工作時無需直流電源,分合閘動作快、操動力大且過程較為平穩,但結構復雜,零部件加工精度要求很高[7-8]。電機直驅操動機構利用數字控制技術與電力電子技術實現電機的跟蹤與控制,不僅滿足斷路器的開關速度與時間要求,在性能和功能方面也有許多優點,如啟動時間短、速度可控性高等[5,9-11]。
伺服系統能夠實現被控對象對控制指令的快速、準確跟蹤[12-15],將伺服控制技術應用于電機直驅操動機構,通過控制電機按照預定行程曲線運行,經傳動機構帶動高壓斷路器動觸頭完成分合閘操作[16-17]。行程曲線規劃需要綜合考慮斷路器運行特性、傳動機構及操動機構性能等多方面因素,在一臺套電機直驅高壓斷路器設備中,操動機構行程曲線與高壓斷路器動觸頭運行軌跡存在確定的映射關系,行程軌跡的優劣直接影響高壓斷路器的運行穩定性、可靠性及使用壽命[8-9,18]。因電機直驅操動機構行程曲線規劃關聯因素多、涉及方面廣,且尚無較為完備的系統性方法,導致實際工程中需要花費大量的人力及實驗成本,以獲取實驗數據對行程曲線進行迭代優化。
針對電機直驅操動機構行程曲線規劃問題,文獻[19]提出一種采用分段求解,逐段拼接的方法進行曲線設計,整體設計思路清晰,但運算量大,且分段數量以及擬合曲線階次等關鍵參數均需人工經驗干預。文獻[20]結合負載幾何模型,選擇斷路器動觸頭作為軌跡設計出發點,反向推演電機運行曲線,方法較為簡單,但缺少足夠的約束條件,容易得出冗余解,甚至無效解。
本文提出一種基于多項式模型及多目標優化的行程曲線規劃方法,采用多項式模型生成可行域內的行程曲線簇,基于電機直驅操動機構及斷路器運行指標構建多目標優化算法,篩選出最佳行程曲線,以實現在給定約束情況下,減少軌跡規劃計算量,提高軌跡規劃的效率,實現電機直驅操動機構的穩定、可靠運行。
1 電機直驅操動機構負載數學模型
1.1 電機直驅操動機構
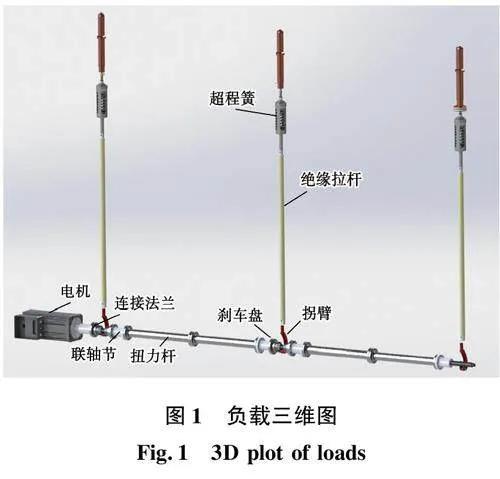
電機直驅操動機構負載如圖1所示,負載主要由傳動機構和開關本體2個部分構成,傳動機構包含聯軸節、連接法蘭、扭力桿及剎車盤,開關本體包含超程簧、動觸頭、靜觸頭等。開關動作由與聯軸節相連的電機帶動,從遠離聯軸節的方向看,順時針為分閘方向,逆時針為合閘方向。
1.2 負載建模
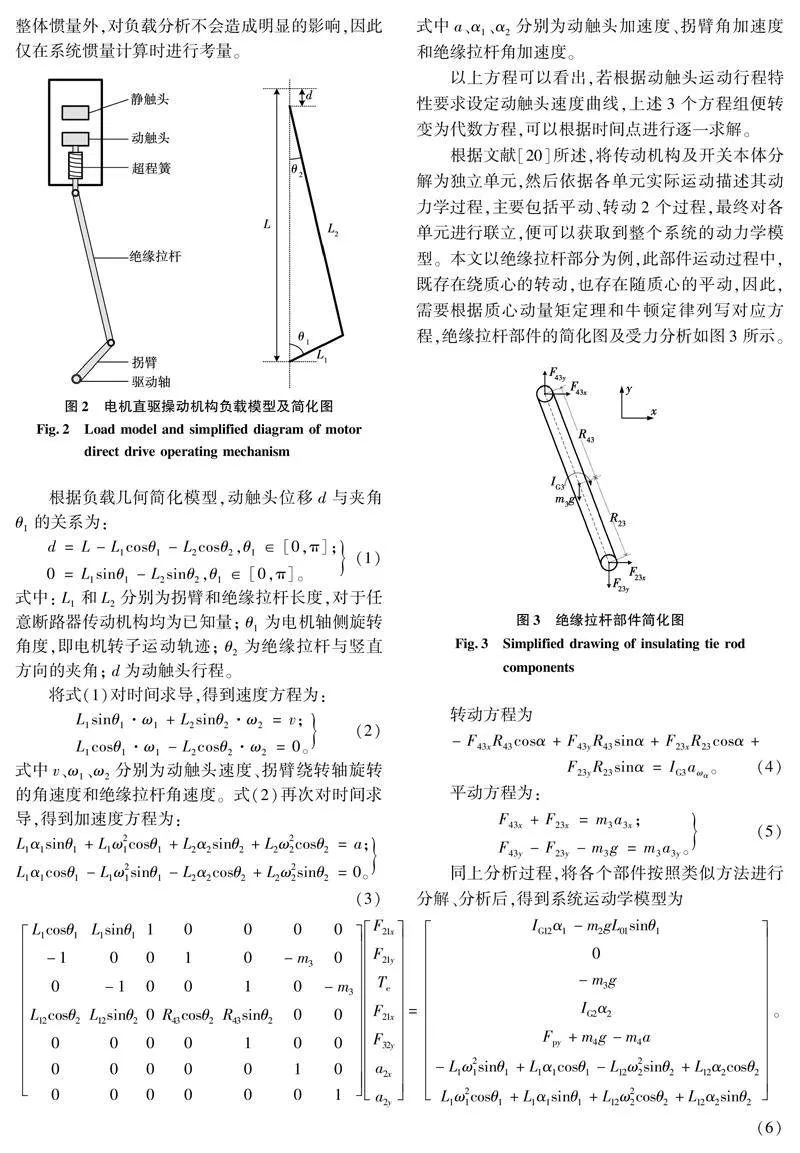
根據文獻[20]所述負載建模方法,結合實驗平臺參數,構建負載特性模型。實驗平臺負載簡化模型如圖2所示,圖中主要部件為拐臂、絕緣拉桿、超程簧以及動觸頭,因聯軸節、連接法蘭、扭力桿、剎車盤等部件僅參與水平方向的旋轉運動,除影響系統整體慣量外,對負載分析不會造成明顯的影響,因此僅在系統慣量計算時進行考量。
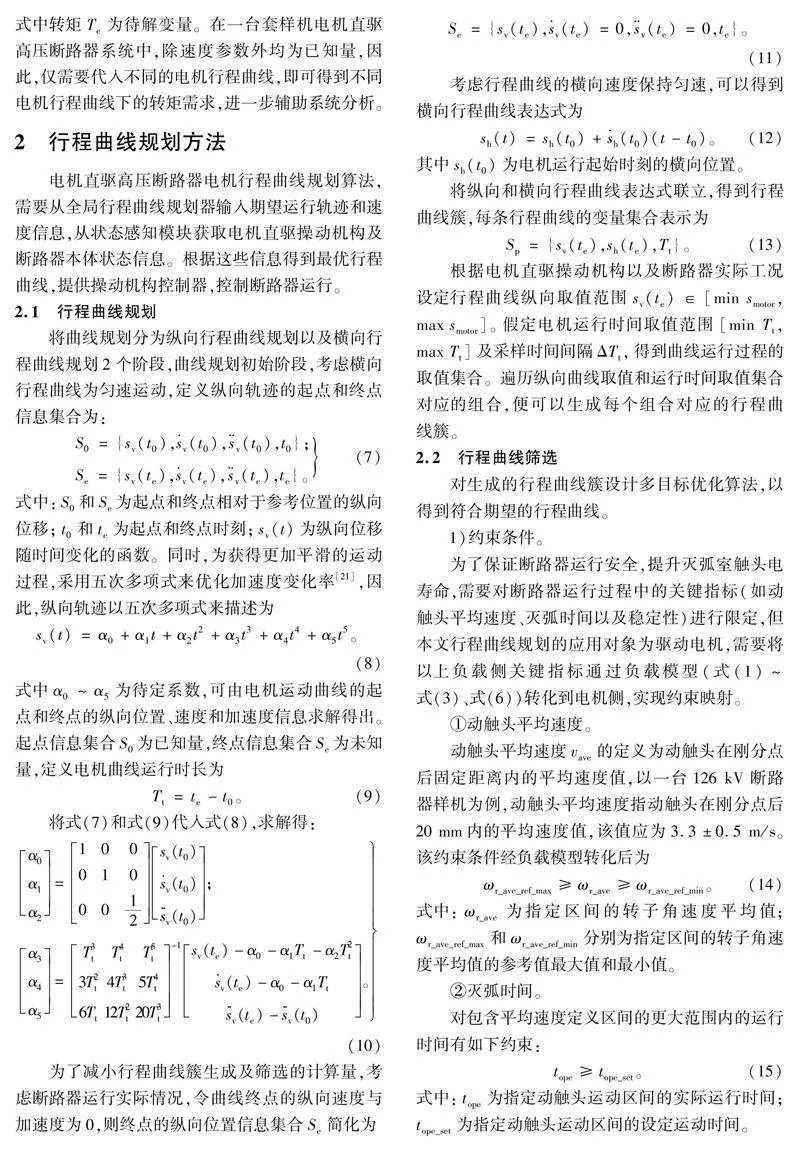
式中轉矩Te為待解變量。在一臺套樣機電機直驅高壓斷路器系統中,除速度參數外均為已知量,因此,僅需要代入不同的電機行程曲線,即可得到不同電機行程曲線下的轉矩需求,進一步輔助系統分析。
2 行程曲線規劃方法
電機直驅高壓斷路器電機行程曲線規劃算法,需要從全局行程曲線規劃器輸入期望運行軌跡和速度信息,從狀態感知模塊獲取電機直驅操動機構及斷路器本體狀態信息。根據這些信息得到最優行程曲線,提供操動機構控制器,控制斷路器運行。
2.1 行程曲線規劃
將曲線規劃分為縱向行程曲線規劃以及橫向行程曲線規劃2個階段,曲線規劃初始階段,考慮橫向行程曲線為勻速運動,定義縱向軌跡的起點和終點信息集合為:
式中:S0和Se為起點和終點相對于參考位置的縱向位移;t0和te為起點和終點時刻;sv(t)為縱向位移隨時間變化的函數。同時,為獲得更加平滑的運動過程,采用五次多項式來優化加速度變化率[21],因此,縱向軌跡以五次多項式來描述為
式中α0~α5為待定系數,可由電機運動曲線的起點和終點的縱向位置、速度和加速度信息求解得出。起點信息集合S0為已知量,終點信息集合Se為未知量,定義電機曲線運行時長為
為了減小行程曲線簇生成及篩選的計算量,考慮斷路器運行實際情況,令曲線終點的縱向速度與加速度為0,則終點的縱向位置信息集合Se簡化為
考慮行程曲線的橫向速度保持勻速,可以得到橫向行程曲線表達式為
其中sh(t0)為電機運行起始時刻的橫向位置。
將縱向和橫向行程曲線表達式聯立,得到行程曲線簇,每條行程曲線的變量集合表示為
根據電機直驅操動機構以及斷路器實際工況設定行程曲線縱向取值范圍sv(te)∈[min smotor,max smotor]。假定電機運行時間取值范圍[min Tt,max Tt]及采樣時間間隔ΔTt,得到曲線運行過程的取值集合。遍歷縱向曲線取值和運行時間取值集合對應的組合,便可以生成每個組合對應的行程曲線簇。
2.2 行程曲線篩選
對生成的行程曲線簇設計多目標優化算法,以得到符合期望的行程曲線。
1)約束條件。
為了保證斷路器運行安全,提升滅弧室觸頭電壽命,需要對斷路器運行過程中的關鍵指標(如動觸頭平均速度、滅弧時間以及穩定性)進行限定,但本文行程曲線規劃的應用對象為驅動電機,需要將以上負載側關鍵指標通過負載模型(式(1)~式(3)、式(6))轉化到電機側,實現約束映射。
①動觸頭平均速度。
動觸頭平均速度vave的定義為動觸頭在剛分點后固定距離內的平均速度值,以一臺126 kV斷路器樣機為例,動觸頭平均速度指動觸頭在剛分點后20 mm內的平均速度值,該值應為3.3±0.5 m/s。該約束條件經負載模型轉化后為
式中:ωr_ave為指定區間的轉子角速度平均值;ωr_ave_ref_max和ωr_ave_ref_min分別為指定區間的轉子角速度平均值的參考值最大值和最小值。
②滅弧時間。
對包含平均速度定義區間的更大范圍內的運行時間有如下約束:
式中:tope為指定動觸頭運動區間的實際運行時間;tope_set為指定動觸頭運動區間的設定運動時間。
③穩定性。
穩定性是指在現有驅動電機及驅動器情況下,以負載動力學模型作為虛擬被控對象,以轉矩為待求解量,將經式(14)和式(15)篩選后的曲線簇代入式(6),求解出對應曲線運行過程中的電機轉矩信息。根據電機設計容量,電機運行曲線所需最大轉矩應不大于電機設計轉矩容量,即
式中n為總的符合條件的曲線數量。
利用所提出的多目標優化算法,根據實際經驗以及曲線目標重要性,設定不同的代價函數權重,并遍歷可行行程曲線簇中的每一條曲線,選擇總代價函數最小的曲線作為最佳曲線。
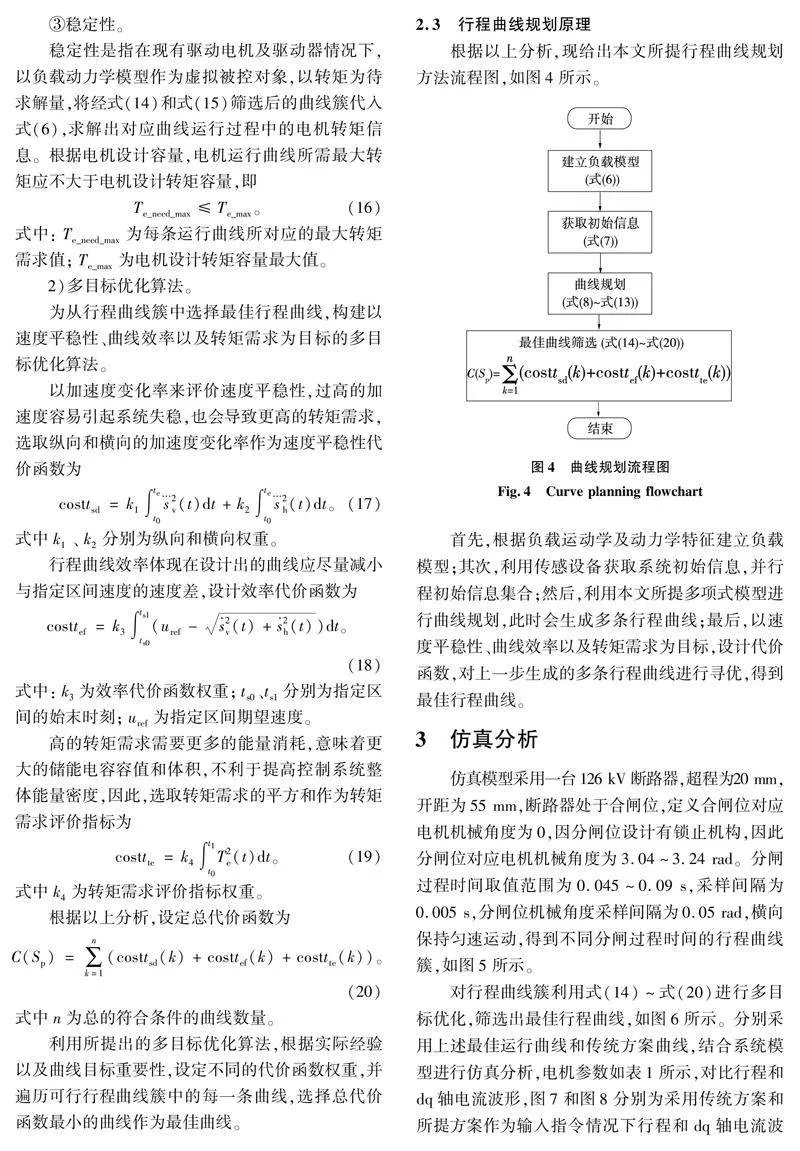
2.3 行程曲線規劃原理
根據以上分析,現給出本文所提行程曲線規劃方法流程圖,如圖4所示。
首先,根據負載運動學及動力學特征建立負載模型;其次,利用傳感設備獲取系統初始信息,并行程初始信息集合;然后,利用本文所提多項式模型進行曲線規劃,此時會生成多條行程曲線;最后,以速度平穩性、曲線效率以及轉矩需求為目標,設計代價函數,對上一步生成的多條行程曲線進行尋優,得到最佳行程曲線。
3 仿真分析
仿真模型采用一臺126 kV斷路器,超程為20 mm,開距為55 mm,斷路器處于合閘位,定義合閘位對應電機機械角度為0,因分閘位設計有鎖止機構,因此分閘位對應電機機械角度為3.04~3.24 rad。分閘過程時間取值范圍為0.045~0.09 s,采樣間隔為0.005 s,分閘位機械角度采樣間隔為0.05 rad,橫向保持勻速運動,得到不同分閘過程時間的行程曲線簇,如圖5所示。
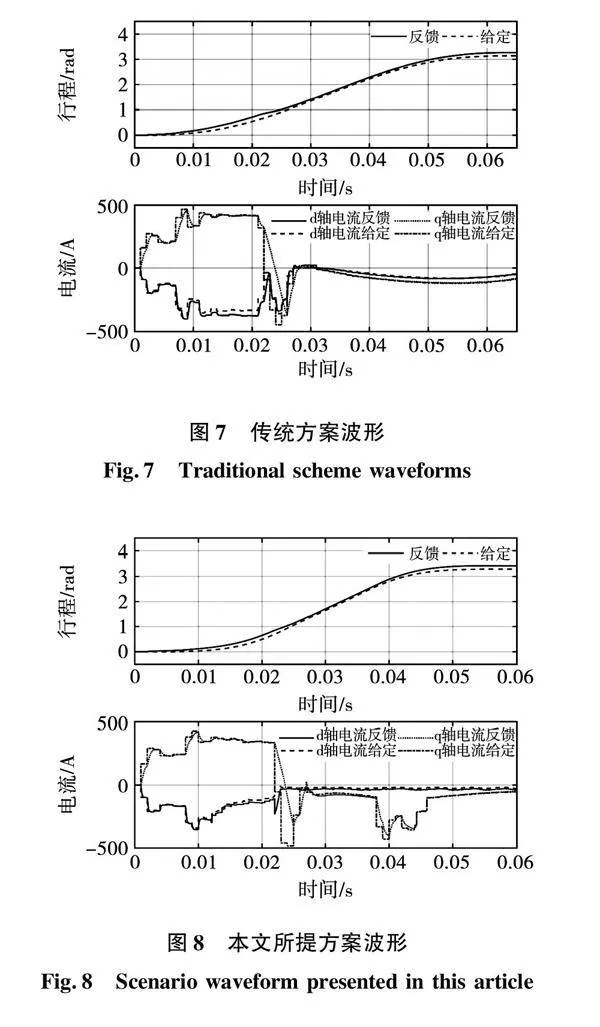
對行程曲線簇利用式(14)~式(20)進行多目標優化,篩選出最佳行程曲線,如圖6所示。分別采用上述最佳運行曲線和傳統方案曲線,結合系統模型進行仿真分析,電機參數如表1所示,對比行程和dq軸電流波形,圖7和圖8分別為采用傳統方案和所提方案作為輸入指令情況下行程和dq軸電流波形。與傳統方法相比,在保持行程曲線跟蹤基本保持相同的情況下,本文所提方案在剛分點前后(0.01~0.02 s)電流需求更少,實際電流能夠更加快速跟蹤給定,同時制動時間點有所提前,使得動作過程末端行程更為平緩,能夠在一定程度上減小機械碰撞,降低機械噪聲。制動時間點的提前,導致制動過程中q軸電流的波動,雖降低了電流的平穩性,但能夠使動作過程末端制動更快,分閘過程整體時間更短,整體動作時間至少縮短5 ms。
4 實驗分析
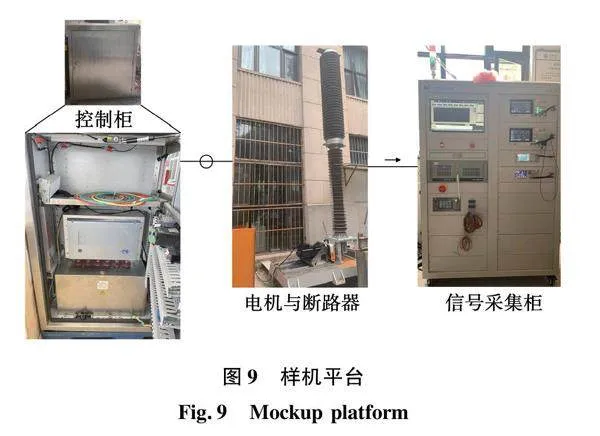
實驗平臺為電機直驅操動機構配一臺126 kV斷路器,設備數據與仿真模型保持一致,控制器與電機采用分體式設計,如圖9所示,實際工程中電機放置于控制柜頂層,中間層為控制器,最下層為儲能電容器。控制器主板采用CPLD+DSP雙核心架構,系統控制頻率及采樣頻率均為10 kHz,系統狀態信息實時存儲于控制器的RAM芯片中,供上位機讀取、分析。
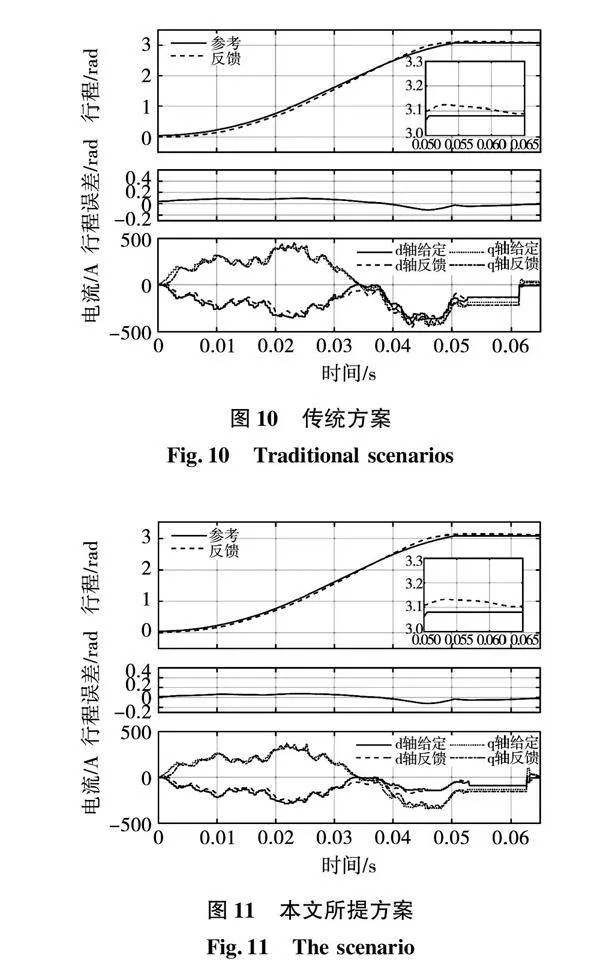
分別采用傳統方法繪制的行程曲線與本文所提方法繪制的行程曲線進行實驗,結果如圖10和圖11所示。仿真中采用的負載模型簡化了傳動過程中的機械碰撞、摩擦以及氣體壓縮等復雜過程,導致負載模型在剛分點后存在瞬時反向轉矩(0.02~0.03 s),反映在仿真中便是瞬時的反向電流需求峰值,但實際過程中,該反向轉矩數值及變化率都小于負載模型,因此在實驗中剛分點后的瞬時電流不會存在突然的反向尖峰。從圖中可以看出,2種方案均能夠實現分閘操作,且行程跟蹤誤差曲線均較為平滑,但在滅弧區間(0~0.035 s)內,本文所提方案最大跟蹤誤差為0.077 rad,傳統方法最大跟蹤誤差為0.094 rad,跟蹤效果更好,可以有效提高跟蹤精度,減小系統的穩態誤差。此外,從全局電流環指令的有效值幅值可知,本文所提方案有著更低的轉矩需求。
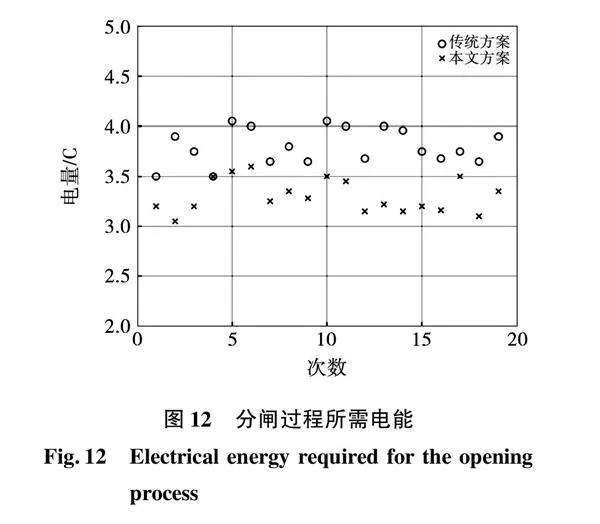
從單次分閘動作所需電量的角度可以體現出該方案的另一優勢,圖12為傳統方法與本文所提方法分別進行19次分閘動作的電能消耗分布圖,借助于多目標優化算法中構建的轉矩需求評價指標,能夠在最佳曲線選擇過程中,綜合評價篩選出電能消耗與其他指標相對折衷的最佳曲線,從圖中可以看出,與常規方法相比,本文所提方法能夠減少10.3%的電能消耗,對于縮減儲能電容容值及體積,提升控制系統整體功率密度有著巨大的指導意義。
4 結 論
針對當前電機直驅操動機構行程曲線無法有效匹配機構及系統特性,且缺乏系統性規劃方法的問題,提出一種基于多項式模型及多目標優化的電機直驅操動機構行程曲線規劃方法,采用多項式模型生成行程曲線簇,基于電機直驅操動機構及斷路器運行指標構建多目標優化算法,篩選出最佳行程曲線。
本文所提方案,規劃效率高,規劃過程無需過多的人工干預,實際運行效果與傳統設計方法并經多次人工干預優化后的曲線相當,能夠解決行程曲線與機構及系統特性匹配以及曲線設計過程中的優化問題,使斷路器獲得良好的動態響應特性的同時降低了系統調試成本,實現電機直驅操動機構的穩定、可靠運行,且能夠實現10.3%的能耗優化,提升系統整體功率密度。
參 考 文 獻:
[1]BOSMA Anne, CAMERONI Roberto, BLUNDELL Mark. Introducing a new generation of operating mechanism for high voltage AC circuit-breakers[J]. Journal of Electrical amp; Electronics Engineering, 2002, 21(3): 233.
[2]LIU Zhiyuan, WANG Jimei, XIU Shixin, et al. Development of high-voltage vacuum circuit breakers in China[J]. IEEE Transactions on Plasma Science, 2007, 35(4): 856.
[3]林莘, 王德順, 馬躍乾. 新一代高壓斷路器直線伺服電動機操動機構[J]. 電氣時代, 2007(2): 68.
LIN Xin, WANG Deshun, MA Yueqian. A new generation of linear servomotor operating mechanism for high voltage circuit breaker[J]. Electric Times, 2007(2): 68.
[4]張智超. 基于DSP的126 kV高壓斷路器電機操動機構控制系統研究[D]. 沈陽:沈陽工業大學, 2018.
[5]滕云龍. 高壓斷路器操動機構的驅動電機及其控制系統的研究[D]. 沈陽:沈陽工業大學, 2019.
[6]楊明. 126kV真空斷路器新型永磁操動機構研究[D]. 南京:東南大學, 2017.
[7]蘆宇峰. SF6高壓斷路器智能化操動機構的設計[D]. 哈爾濱:哈爾濱理工大學, 2013.
[8]蘆宇峰, 孟大偉, 徐永明, 等. SF6高壓斷路器智能化操動機構的研究與優化[J]. 電機與控制學報, 2013, 17(7): 94.
LU Yufeng, MENG Dawei, XU Yongming, et al. Research and optimization of intelligent operating mechanism for SF6 high voltage circuit breaker[J].Electric Machines and Control,2013,17(7):94.
[9]HUANG Yulong, WANG Jingjun, ZHANG Wenchao, et al. A motor-drive-based operating mechanism for high-voltage circuit breaker[J]. IEEE Transactions on Power Delivery, 2013, 28(4): 2602.
[10]唐誠, 韓書謨, 吳軍輝, 等. 高壓斷路器電機驅動操動機構控制方法[J]. 微電機, 2017, 50(2): 32.
TANG Cheng, HAN Shumu, WU Junhui, et al. Control strategy for motor drive mechanism of high-voltage circuit breaker[J]. Micromotors, 2017, 50(2): 32.
[11]林莘, 王德順, 徐建源, 等. 單神經元PID控制器在高壓斷路器運動控制技術中的應用[J]. 電工技術學報, 2009, 24(6): 35.
LIN Xin, WANG Deshun, XU Jianyuan, et al. Application of single neuron PID controller in movement control of high voltage circuit breaker[J]. Transactions of China Electrotechnical Society, 2009, 24(6): 35.
[12]YOU S, GIL J, KIM W. Adaptive neural network control using nonlinear information gain for permanent magnet synchronous motors[J].IEEE Transactions on Cybernetics,2021,53(3):1392.
[13]LIU B, YU D, ZENG X, et al. Practical discontinuous tracking control for a permanent magnet synchronous motor[J]. Mathematical Biosciences and Engineering, 2023, 20(2): 3793.
[14]劉剛, 張婧, 鄭世強, 等. 基于參數在線辨識的高速永磁電機無差拍電流預測控制[J].電機與控制學報,2023,27(9):98.
LIU Gang, ZHANG Jing, ZHENG Shiqiang, et al. Deadbeat predictive current control of high speed permanent magnet motor based on online parameter identification[J]. Electric Machines and Control, 2023, 27(9): 98.
[15]周世炯, 李耀華, 史黎明, 等. 基于自適應非線性跟蹤微分器的直線電機位置和速度檢測方法[J]. 電機與控制學報, 2023, 27(10): 24.
ZHOU Shijiong, LI Yaohua, SHI Liming, et al. Linear motor position and speed measurement method based on adaptive nonlinear tracking differentiator[J]. Electric Machines and Control, 2023, 27(10): 24.
[16]鄧赟, 武建文, 金鑫晨, 等. 基于高壓斷路器電機操動機構的位移分段控制策略[J].電工技術學報,2018,33(15):3586.
DENG Yun, WU Jianwen, JIN Xinchen, et al. Displacement subsection control strategy based on motor operating device of high voltage circuit breaker[J]. Transactions of China Electrotechnical Society, 2018, 33(15): 3586.
[17]邵盛楠, 黃瑜瓏, 王靜君, 等. 高壓斷路器電動機驅動操動機構的研究[J]. 高電壓技術, 2008, 34(3): 555.
SHAO Shengnan, HUANG Yulong, WANG Jingjun, et al. Motor drive mechanism of high-voltage circuit breaker[J]. High Voltage Engineering, 2008, 34(3): 555.
[18]林莘, 王德順, 徐建源. 高壓斷路器直線伺服電機操動機構及其控制技術[J]. 中國電機工程學報, 2008, 28(27): 137.LIN Xin, WANG Deshun, XU Jianyuan. Linear servo motor operating mechanism and control technology for high-voltage circuit breaker[J]. Proceedings of the CSEE, 2008, 28(27): 137.
[19]HE D, ZHONG J, HAO L, et al. Motor direct-drive high-voltage circuit breaker servo mechanism path dynamic planning method[C]//2021 International Conference on Advanced Electrical Equipment and Reliable Operation(AEERO),Oct.15-17,2021,Beijing, China. 2021: 1-5.
[20]王瀟. 高壓真空斷路器電機直驅操動機構控制策略研究[D]. 湘潭:湘潭大學, 2019.
[21]TAKAHASHI A, HONGO T, NINOMIYA Y, et al. Local path planning and motion control for AGV in positioning[C]// Proceedings of the 24th symposium of Society of Instrument and Control Engneers of Japan, Sept. 4-6, 1989, Tsukuba, Japan. 1989: 392-397.
(編輯:劉琳琳)
收稿日期: 2023-08-11
基金項目:國家電網公司總部科技項目(5500-202199520A-0-5-ZN)
作者簡介:王 瀟(1992—),男,博士研究生,研究方向為高性能電機控制;
吳旭升(1976—),男,博士,教授,博士生導師,研究方向為大功率電機控制、無線充電技術等;
肖 曦(1973—),男,博士,教授,博士生導師,研究方向為高性能電機控制、海浪發電技術、電力儲能與微電網技術。
通信作者:肖曦
