智能網聯汽車場地試驗場景規劃及實踐
2024-07-22 00:00:00劉曉徐振海楊文光王冠軍
專用汽車 2024年7期


摘要:為了補足公司智能網聯汽車場地試驗能力,分析了目前封閉場地的建設方式及成效,梳理了場地技術條件、自動駕駛功能及網聯功能測試的典型場景需求和特點。基于公司汽車試驗場及內部園區道路實際情況,借助PEGASUS項目道路層元素完成了各場景建設位置規劃。在完成場地道路、交通設施等建設或改造后,經自動駕駛功能場景試驗驗證,公司已具備自動駕駛功能場地試驗的測試評價能力,并取得CMA和CNAS資質的認定、認可,為其他智能網聯汽車試驗場地建設或改造提供了參考及經驗。
關鍵詞:智能網聯汽車;封閉場地試驗;場景規劃
中圖分類號:U46979 收稿日期:2024-03-10
DOI:1019999/jcnki1004-0226202407001
1 前言
縱觀全球汽車市場,汽車電動化、智能化、網聯化滲透率呈現快速提升趨勢,國內新能源汽車產銷量從10年前的75萬輛激增到2023年的950萬輛,占全球比重超過60%,其中具備2級駕駛自動化功能車輛滲透率達到553%[1]。智能網聯汽車(Intelligent & Connected Vehicle,ICV)是汽車產業新變革的核心動能,目前正處于從科學研究到產品準入探索的關鍵階段。為推動智能網聯汽車產品性能提升和產業生態優化,我國于2018年開始實施道路測試,于2021年拓展到示范應用,于2023年底開始遴選具備量產條件的產品。
智能網聯汽車場地測試作為保障高級別駕駛自動化功能安全的必要一環,主要針對典型場景和極限場景,并且試驗場景應表征車輛設計運行條件(Operational Design Condition,ODC)內所要求的工況[2]。場地試驗從環境到車輛系統均為實物,強調環境和場景的還原和模擬能力,也以真實的測試過程被視作實際道路測試的先驗條件,各大主機廠、檢驗機構等投入大量資金新建或改造試驗場地,用于探索并解決車輛在運行過程中可能出現的技術問題[3]。因此,作為國家級汽車檢測中心,補足智能網聯汽車場地試驗能力是公司長遠發展的必須環節。
為在公司園區實現智能網聯汽車場地測試,本文通過分析目前封閉場地的建設方式及成效,梳理智能網聯汽車測試場地技術條件、自動駕駛功能及網聯功能測試的典型場景需求和特點,基于公司汽車試驗場地及內部園區道路實際情況,以道路元素為基礎規劃各場景位置,研判出適用于本公司發展的智能網聯汽車試驗場景建設方案。
2 智能網聯汽車試驗場情況
截至2023年底,全國共建設17個國家級測試示范區、7個車聯網先導區、16個智慧城市與智能網聯汽車協同發展試點城市[4]。智能網聯汽車封閉場地建設主要有新建和舊場地改造兩種方式,新建場地需要土地、建筑、設備、系統等多方面投入,建設周期長且耗資巨大,以中德智能網聯汽車四川試驗基地、智能網聯汽車(華東)綜合試驗場、國家智能網聯汽車(武漢)測試示范區為例,均需要數十億的資金投入[5]。利用傳統汽車試驗場基礎進行改造,并充分覆蓋國內外法規和屬地省級智能網聯測試要求,既能避免土地方面的大量投入,又能滿足智能網聯汽車測試需求,無疑是非常合理的選擇。
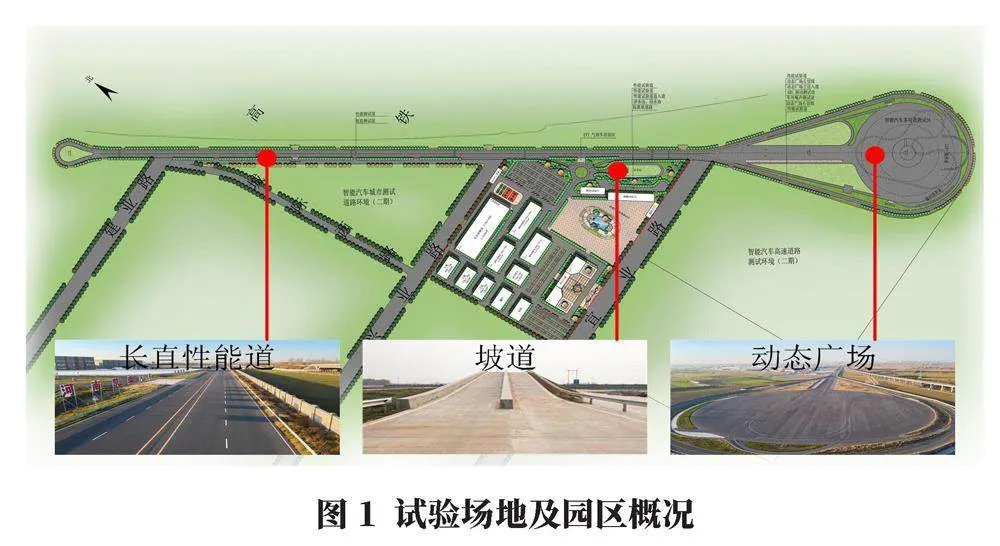
國家智能清潔能源汽車質量檢驗檢測中心,目前已取得國家認監委檢驗檢測機構資質認定(China Inspection Body and Laboratory Mandatory Approval,CMA)、中國合格評定國家認可委員會實驗室認可(China National Accreditation Service for Conformity Assessment,CNAS)、工信部道路機動車輛檢驗檢測機構資質授權、交通部道路運輸車輛達標車型檢測授權等。汽車試驗場包括24 km的長直線性能路、直徑為300 m的動態廣場(含彎道制動路、J型轉向路、直角彎)以及5叉環道路口、匝道等連接道路,路面為混凝土瀝青路面,縱向坡度≤01%,橫向坡度≤05NPZq3EH5Nh8THYVCB5V4cz7DxEDeePxH0I7jyLHPyOM=%,摩擦因數088≤μ≤092,路面可以滿足最大軸荷13 t、最大總重55 t的車輛進行試驗,內部園區道路及試驗場概況如圖1所示。
3 場地試驗典型場景需求
針對智能網聯汽車測試場景需求方面,由于各測試基地或示范區建設標準及測試評價體系各有特色,測試結果異地互認難以突破。因此,在規劃智能網聯汽車測試基地時綜合考慮“河南省道路測試、汽車行業測試結果互認、國家智能網聯汽車產品準入”三級測試評價需求,分別針對智能網聯汽車測試場地技術條件、自動駕駛功能測試以及網聯功能測試,篩選出《TCSAE 125—2020智能網聯汽車測試場設計技術要求》《自動駕駛封閉測試場地建設技術指南(暫行)》《GB/T41798—2022智能網聯汽車自動駕駛功能場地試驗方法及要求》《CSAE 53—2017合作式智能運輸系統車用通信系統應用層及應用數據交互標準》《CSAE 157—2020合作式智能運輸系統 車用通信系統應用層及應用數據交互標準(第二階段)》以及《關于進一步完善智能網聯汽車道路測試管理制度的通知》(豫工信聯裝〔2020〕62號)共6項標準作為建設依據,覆蓋標準中的89個試驗場景。
場景分層框架是目前分析場景元素組成及其彼此關聯的方法,多用于明確智能網聯汽車自動駕駛功能設計運行范圍(Operational Design Domain,ODD),包含影響汽車行駛安全最為關鍵的因素,例如,道路與道路結構、天氣及光照條件,以及各類交通參與物的形態、行為等。PEGASUS項目場景分層框架具有6層結構,分別為道路、交通設施、道路和交通設施的短暫操作、目標物、環境條件及通信信息[6]。由于在選取場景點位時主要考慮場景對道路元素的需求,如若兩個場景對道路元素的需求一致,則該兩個場景可在同一點位進行測試,只不過在構建時需要根據場景的其他元素進行分類疊加即可。此類選取場景布置點位的方法可滿足在同一點位實現不同的場景測試需求,有利于提高封閉場地的道路資源,提高試驗開展的效率。通過分析以上89個典型場景的描述及要求,結合各場景道路元素的需求分析,篩選出27個場景點位。
4 試驗場景規劃與實踐
封閉場地試驗場景的構建是以汽車試驗場、園區內部道路以及周邊開放道路為基礎,通過擴建改造試驗道路、部署道路基礎設施、建設專用網絡、架設智能網聯汽車大數據云控平臺和測試場智能監管系統等實現“車-路-云-網”四大要素統籌建設方案,完成了重點區域交通設施車聯網功能改造與核心系統能力提升。
對于明確的試驗場景,在道路元素已在固定點位明確的情況下,通過臨時添加交通設施、目標物等其他場景元素實現場景的柔性化設計,其優點在于配置靈活,可實現單一測試場地的快速復用,提高測試效率,同時不影響在試驗場開展傳統車輛相關性能(動力性、經濟性、操縱穩定性)的測試。例如,在單向兩車道的道路上臨時布置交通錐、道路施工標志牌等可實現施工車道場景,或者是在同一位置布置不同的限速標志牌及解除限速標志牌可實現限速標志場景。基于上述場景構建方法,在汽車試驗場、內部園區道路以及周邊道路上建成了總里程為157 km的測試道路,包括封閉道路測試區(高速工況測試區)、半封閉測試區(城市工況測試區)以及特殊場景測試區3個部分。
城市工況測試區為供智能網聯汽車進行車速為20~80km/h范圍內測試的道路及測試環境,具有城市道路的特點。該測試區主要包括城市主干路(模擬城市快速路行車道)、城市次干路、城市支路、交叉路口、環島、公交站臺、公交專用道等,如圖2所示,其中28號點位為測試場地的指揮中心(數字孿生平臺)。
高速工況道路為供智能網聯汽車進行車速為60~120 km/h范圍內測試的道路及測試環境,具有高速公路的特點。高速工況測試區內設置有長24 km的雙向5車道的行車道,兩側設有分隔帶,U形路口、圓形路口、5叉環道路口等交叉路口,包括主路、匝道、收費站、應急車道等,如圖3所示。
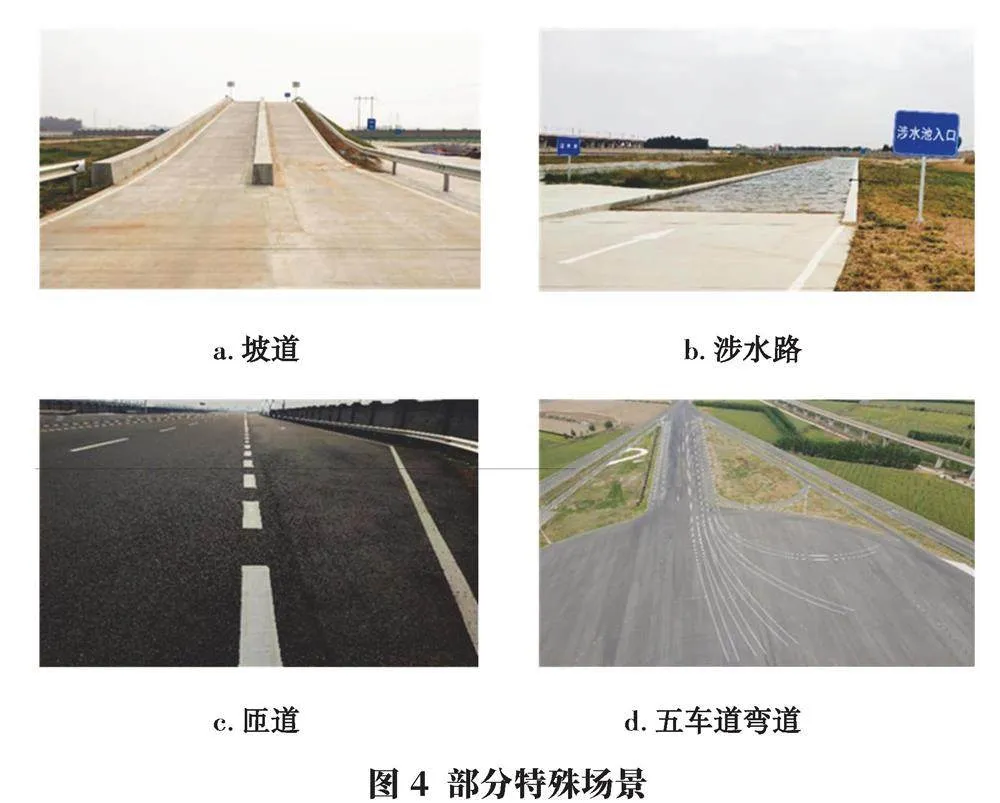
特殊場景測試區為供智能網聯汽車行駛的路面形態特殊或有特殊要求的測試道路及測試環境,如圖4所示。特殊工況建設有模擬冰面、不同坡度的坡道、涉水路、隧道、雨霧模擬系統、充電站、加油站、公交車站、停車場以及收費站等特殊場景。
在完成場地道路、交通設施等建設或改造后,以RT 3000、V-Box等設備采集車輛對場景的反應情況數據,按照GB/T41798—2022對涉及的試驗場景進行了驗證,并且該項標準已取得CMA和CNAS資質的認定、認可,借助此次對公司試驗場及園區內部道路改造,公司建成了滿足多種車輛類型自動駕駛功能及網聯功能的測試技術服務能力。圖5所示為部分場景驗證過程。
5 結語
智能網聯汽車道路測試、產品準入等均需進行車輛搭載功能的場地試驗,補足智能網聯汽車場地測試能力是第三方檢測機構長遠發展的必須環節。本文分析了目前封閉場地的建設方式及成效,梳理了場地技術條件、自動駕駛功能及網聯功能測試的典型場景需求和特點,基于公司汽車試驗場地及內部園區道路實際情況,以道路元素為基礎規劃了各場景位置及場景建設方案。最后,通過實際改造,建成了滿足多種車輛類型自動駕駛功能及網聯功能的測試技術服務能力,并取得相關試驗能力資質的認定、認可,為其他智能網聯汽車試驗場地建設或改造提供了參考及經驗。
參考文獻:
[1]王震坡,黎小慧,孫逢春產業融合背景下的新能源汽車技術發展趨勢[J]北京理工大學學報,2020,40(1):1-10
[2]李彥睿基于實車試驗數據的自動駕駛測試場景構建技術[D]重慶:重慶大學,2021
[3]余卓平,邢星宇,陳君毅自動駕駛汽車測試技術與應用進展[J]同濟大學學報(自然科學版),2019,47(4):540-547
[4]李克強,邊明遠創新發展智能網聯汽車構建“數字福建”經濟增長新格局[J]發展研究,2023,40(5):1-6
[5]馮乾隆,吳松,王易,等我國智能網聯汽車測試區建設現狀與發展建議研究[J]汽車工業研究,2023(1):34-41
[6]全國汽車標準化技術委員會,智能網聯汽車分技術委員會,自動駕駛標準工作組智能網聯汽車自動駕駛系統測試場景自然語言描述方法標準化需求研究報告[R]2023
作者簡介:
劉曉,男,1988年生,工程師,研究方向為汽車測試評價。
基金項目:河南凱瑞車輛檢測認證中心有限公司公司課題(RD-2023-04)