基于固定時間擾動觀測器的非奇異終端滑模控制器的研究
2024-08-01 00:00:00王榮政戚夢珂金山海
電子產(chǎn)品世界 2024年4期


關鍵詞:滑模控制;固定時間理論;擾動觀測器;Lyapunov 穩(wěn)定性
中圖分類號:TP273 文獻標識碼:A
0 引言
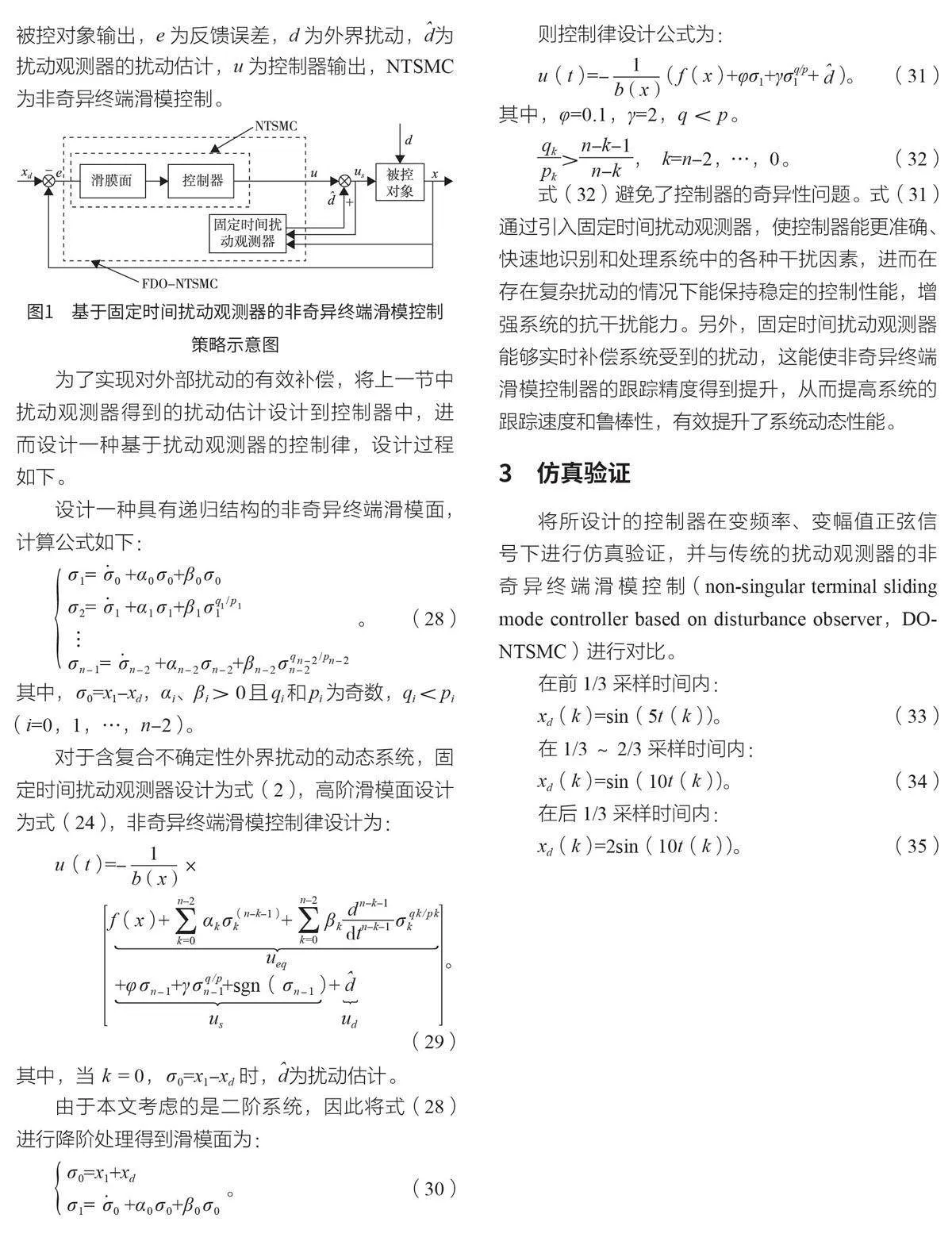
非奇異終端滑模控制憑借算法簡單、魯棒性好和可靠性高,被廣泛應用于運動控制中[1]。但所有滑模控制都會不可避免地引起抖振問題,基于擾動觀測器的控制算法應運而生[2]。分析發(fā)現(xiàn),如果能夠充分利用模型的狀態(tài)空間描述,對輸出信號的總擾動加以估計并進行前饋補償,另外再結合非奇異終端滑模控制方法,往往能夠取得較為滿意的控制效果[3-4]。
基于擾動觀測器和非奇異終端滑模控制理論,本文設計了一種基于固定時間擾動觀測器的非奇異終端滑模控制(non-singular terminal sliding modecontroller based on fixed-time disturbance observer,F(xiàn)DO-NTSMC)策略。
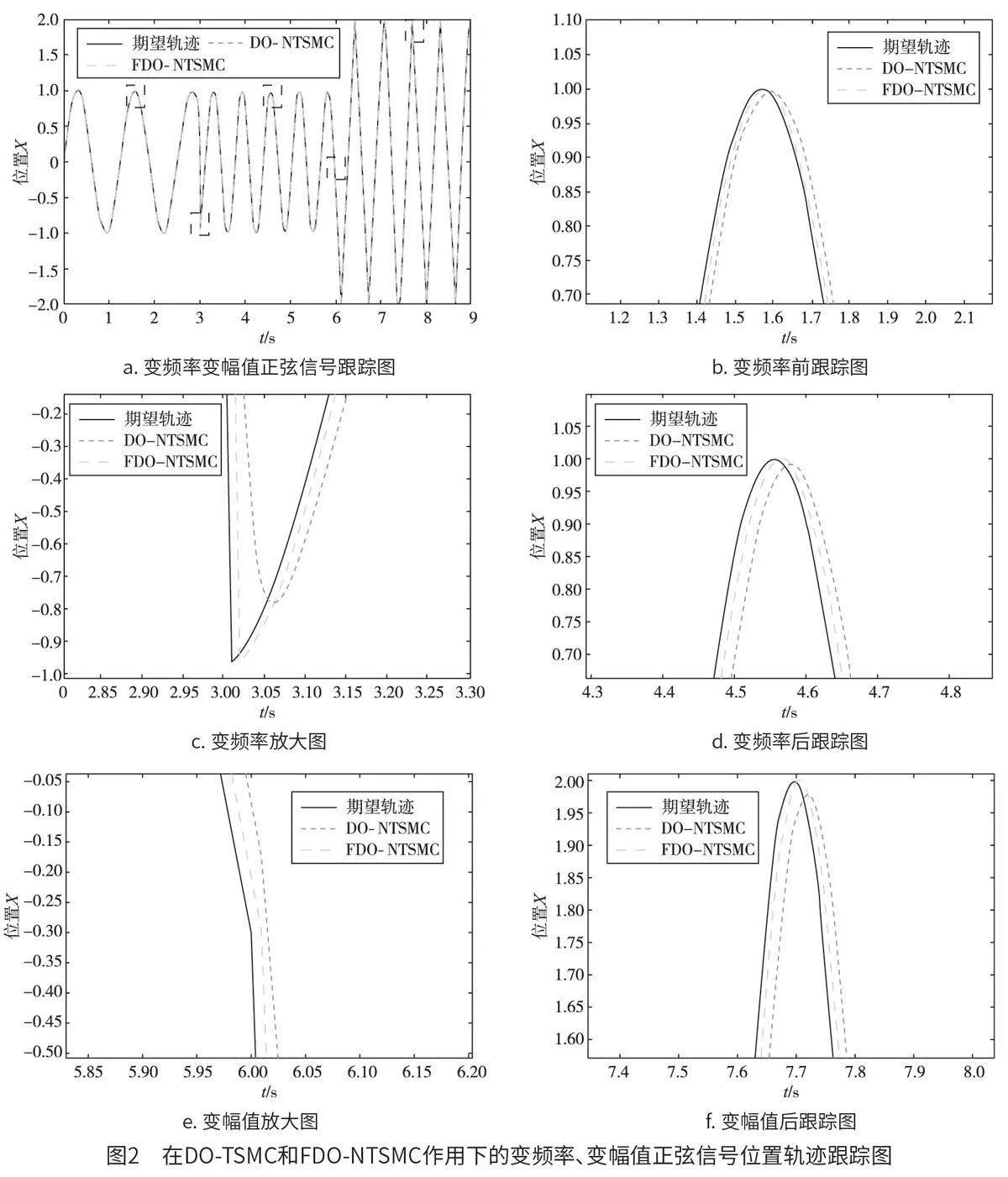
對于上述的正弦信號,分別用DO-NTSMC 和本文提出的FDO-NTSMC 對變頻率、變幅值的正弦信號跟蹤控制性能做仿真實驗。在DO-TSMC 和FDO-NTSMC 作用下的變頻率、變幅值正弦信號位置軌跡跟蹤圖如圖2 所示。首先,在圖2b 中,本文對比了DO-NTSMC 與FDO-NTSMC 對變頻前正弦信號位置跟蹤的效果。仿真結果表明,F(xiàn)DONTSMC不僅能夠在幅值和相位上更好地逼近期望位置軌跡,而且在放大仿真圖中并未出現(xiàn)抖振現(xiàn)象,顯示出其優(yōu)越的性能。圖2c 則呈現(xiàn)了正弦信號的變頻率跟蹤仿真圖像,在3 s 時,信號頻率翻倍,而幅值保持不變。通過對比,發(fā)現(xiàn)FDONTSMC在頻率突變前后均能夠精確地跟蹤目標值,而DO-NTSMC 則存在較大的誤差。特別是在頻率突變后,F(xiàn)DO-NTSMC 能夠迅速適應并減小誤差,同時避免抖振現(xiàn)象的發(fā)生。圖2d 展示了頻率突變后的跟蹤情況,其中FDO-NTSMC 的相位滯后較小,相較于DO-NTSMC,其具有更高的跟蹤精度。此外,圖2e 展示了正弦信號變幅值跟蹤的仿真結果。在6 s 時,信號幅值翻倍,頻率保持不變。對比仿真結果,本文發(fā)現(xiàn)FDO-NTSMC 在幅值突變前后均能更準確地跟蹤目標軌跡,而DO-NTSMC的誤差較大。圖2f 呈現(xiàn)了幅值突變后的跟蹤圖像,進一步證明了與DO-NTSMCF 相比,F(xiàn)DO-NTSMC具有更小的相位滯后和更高的軌跡跟蹤精度。
4 結語
本文提出的基于固定時間擾動觀測器的非奇異終端滑模控制,能夠在固定時間收斂到目標值,且沒有抖振現(xiàn)象,跟蹤性能優(yōu)越。由于提出的控制器參數(shù)過多,未來還需要進一步調整模型,尋找最佳值;同時目前仿真驗證的被控對象較為簡單,下一步還將嘗試將該模型應用于較為復雜的機械臂模型中。