基于Cartographer的智能探測機器人
2024-08-01 00:00:00楊建海郭威張葉希劉師岐儲茂祥
電子產品世界
2024年4期
關鍵詞:Cartographer;智能探測機器人;SLAM 算法;激光雷達
中圖分類號:TP89;TP277;TP242.6 文獻標識碼:A
0 引言
在現代自動化和智能化領域,智能探測機器人在解決復雜環境探測和建圖任務中具有至關重要的作用。Cartographer 算法是一種先進的即時定位與地圖構建(simultaneous localization and mapping,SLAM)算法,可以幫助機器人實現高精度地圖構建和自我定位。
在工業、農業、醫療等多個領域,智能探測機器人系統有著廣闊的應用潛力。其能夠執行自我偵測、導航和繪圖等功能,從而提升工作效率并降低人力成本。
本文以智能探測機器人系統為研究對象,關注其在復雜環境下的導航及建圖問題,具體包括傳感器數據融合不精確、導航路徑規劃不高效、SLAM 算法精度有待提升等。國內外在智能探測機器人領域已取得一定研究成果。國外研究主要集中在 SLAM 算法的優化、傳感器數據處理技術,如Cartographer 算法在機器人領域的應用。國內研究涉及智能導航算法、機器人系統設計,但在建模精度和系統穩定性方面仍有提升空間。本文旨在結合國內外研究成果,提出優化方案,提升系統的穩定性和魯棒性,推動智能探測機器人系統的發展與應用。
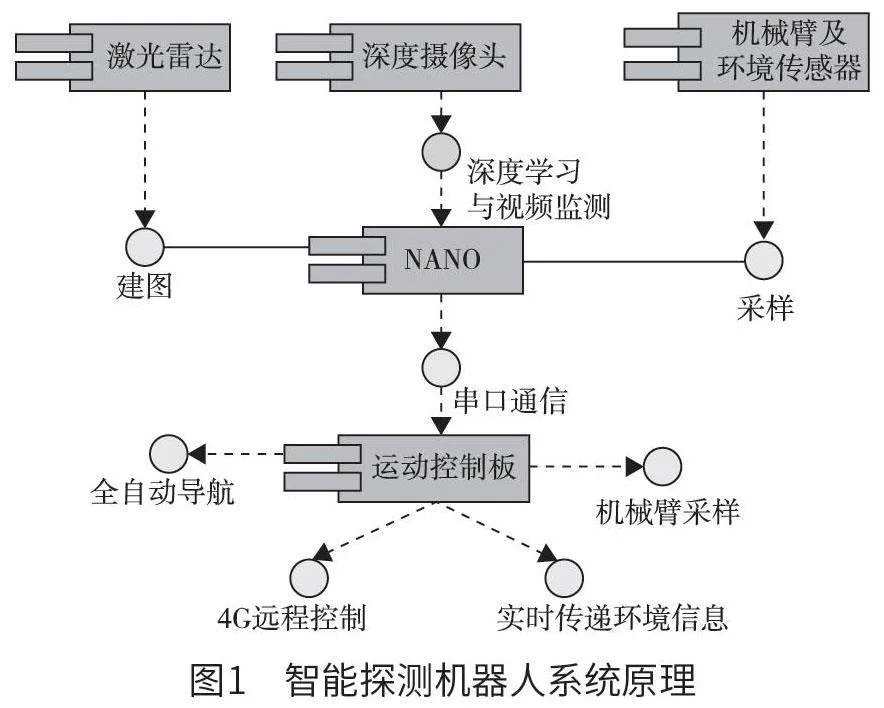
1 系統設計
本文設計了由NVIDIA Jetson Nano 驅動的智能探測機器人,其主要控制部分整合了多種設備,如激光雷達( LiDARs)、 相機(cameras)、慣性測量單元( inertia measurements units,IMU)、二氧化碳傳感器及煙霧探測器(CO2 sensors and smokedetectors)等。這些傳感器的聯合使用賦予了智能探測機器人自主導航和環境信息采集的能力。
通過高性能的主控模塊NVIDIA Jetson Nano,智能探測機器人能夠實現強大的運算能力和處理速度,從而確保系統高效運行和即時響應。……
登錄APP查看全文