“算法戰”項目的進展與分析
2024-08-15 00:00:00劉代軍
無人機 2024年2期
作戰概念
隨著人工智能技術的迅猛發展以及智能武器裝備的應用,新一輪軍事變革已拉開大幕,傳統信息化戰爭的核心技術是通信技術和先進的傳感器技術,智能化戰爭的核心技術則是算法和依靠數據構建作戰系統。“算法戰”是以應對信息化戰爭中復雜作戰問題為目標,以各種信息系統、武器平臺中的軟件為載體,通過大數據、機器學習、優化決策等智能技術,通過代替、輔助作戰人員,實現更加精準、高效、可靠地完成作戰任務的作戰理念和技術手段。“算法戰”作戰概念由以下內容組成:
(1)“算法戰”的主體是軟件,強調信息化作戰中軟件的重要性,以軟補硬、算法致勝,通過靈活、敏捷、智能等算法特征抵消和拉大與作戰對手在硬件上的差距。
(2)“算法戰”的客體是體系,體系的作用域涵蓋了物理、信息、社會等方面,既包括武器裝備、信息系統、保障系統等,也包括人員、基礎設施以及社會輿論等方面。
(3)“算法戰”的基礎是智能,以海量戰場數據和強大的計算能力為支撐,通過挖掘智能算法在態勢感知、情報分析、指揮決策、精確打擊等方面的巨大潛力,用智能技術破解戰爭攻防問題。
作戰模式
兵棋推演
兵棋推演作為戰爭推演、方案評估、作戰分析等活動的重要分析手段,用于作戰問題研究、戰法創新以及作戰概念開發。隨著未來新軍事革命從信息化向智能化轉型,人工智能、無人系統、網絡化指揮控制、兵棋推演相結合將成為未來作戰體系的重要組成部分。智能算法作為大數據和云計算的核心,將其與兵棋推演有機結合,能夠充分發揮二者優勢。“算法戰”以兵棋推演的數據資源作為支撐,以智能算法作為手段,對敵我對抗演習的實時數據進行分析處理,挖掘能夠提升戰法策略的高價值經驗,并以此不斷地對電子態勢進行復盤分析、查漏補缺,在反復推演中修正、完善、提高原有戰法策略,達到推動軍事智能化發展和提升部隊戰斗力的目的。

美軍歷來高度重視兵棋推演的建設和運用,并將其作為創新作戰概念的重要工具。美軍將“算法戰”與兵棋推演深度融合,計劃在下一代兵棋推演中融入人工智能、信息柵格、云計算、空間地理信息等內容,不斷增強兵棋推演的科學性、精準性,并利用“算法戰”驗證已有戰法和作戰計劃,為最終的作戰方案提供重要的經驗支撐。美軍參謀長聯席會議計劃通過兵棋推演檢驗人工智能技術,美國空軍舉行的“未來能力演習”“施里弗太空演習”“聯合作戰演習”已經將兵棋推演與作戰需求緊密結合,實現了近似實戰背景下的作戰模擬。蘭德公司開展基于“算法戰”技術的兵棋推演如圖1所示。
戰場感知
軍事智能技術的飛速發展和廣泛應用,已經引起作戰理論、戰爭模式、作戰方式、作戰力量以及軍隊組織形態的深刻變革。戰場感知作為實施全域作戰的共性基礎技術,其核心在于匯集多域和多元情報信息,將目標分析和打擊決策等作戰任務與作戰需求融合處理,并通過多維關聯、分析挖掘和預測評估,生成能夠保障全域作戰的態勢圖。
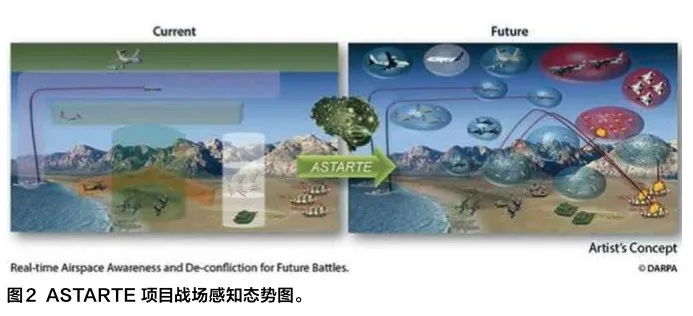
“算法戰”已經成為戰場感知、戰場決策、指揮和協同的重要支撐。2016年8月,美國國防科學委員會向國防部建議設立機載自主傳感器系統項目,以滿足無人機系統全動態、高分辨率視頻數據的搜集和處理需求。2020年4月,美國國防部預研局(DARPA)與美國陸軍和空軍合作開展了ASTARTE項目,該項目能在高度擁擠的作戰空間中消除友軍間的空域活動沖突,實現高效的空域作戰。ASTARTE項目不僅可為美軍提供持續更新的戰場動態圖,而且還可利用其傳感器網絡系統探測、繪制敵方位置,從而提高在反介入/區域拒止(A2/AD)環境下的戰場感知能力。ASTARTE不同于動態空域通用作戰地圖,能夠與美軍各軍種目前及將來使用的指揮與控制系統兼容,能夠自動將最新空域信息推送給所有聯合作戰單位。ASTARTE項目專注于三個重點技術領域:理解和決策算法,該算法能夠自動識別和預測空域沖突,確定限制的飛行區域,提出風險評估及空域沖突解決方案;能夠實時檢測和跟蹤飛機(有人駕駛和無人駕駛)、機載武器和可能存在安全隱患的傳感器;虛擬實驗室測定平臺的開發,對聯合作戰空域管理系統、操作系統和ASTARTE技術進行仿真。ASTARTE項目戰場態勢感知如圖2所示。
輔助決策
美軍“算法戰跨職能小組”借助人工智能技術,開展了情報領域的機器學習、視覺算法等技術的研究,研發了快速處理數據軟件,該軟件能夠對目標實現探測、分類和預警,為美軍提供高質量、強時效性的戰場情報,快速支撐戰場決策。采用“算法戰”之前,情報分析作戰人員在分析海量視頻數據時,會將大量時間花費在視頻查看、尋找異常點等低效的活動上,難以對實時傳輸、多方來源、體量龐大的數據信息進行分析,輔助戰場決策的時效性弱。與之形成鮮明對比的是,利用“算法戰”收集情報高速、高效、精準,能夠為戰場決策提供實時的參考,通過戰場實時情報的反饋,算法能夠不斷地修正戰場情報分析結果,輔助戰場決策的時效性強。
20世紀80年代開始,美國國家航空航天局、美國國防部預研局、美國國防部相繼開展了神經網絡計算項目的研究,這些項目通過模擬人腦神經元信息處理機制,不斷提高神經網絡技術與計算機“類腦計算”技術的融合能力。采用了“算法戰”的“類腦”計算系統成為未來戰爭中增強現有作戰系統對抗能力的關鍵,“算法戰”在人機協同作戰中能夠幫助機器學習人類成功經驗,為戰場指揮員在選擇戰爭時機、計算戰爭規模、預測戰爭持續時間、謀劃戰爭布局等方面發揮積極作用。
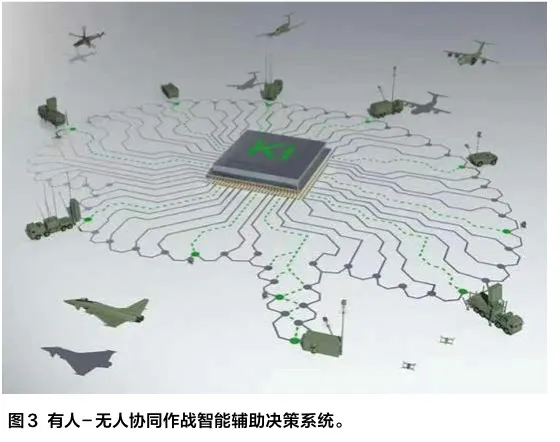
無人機蜂群是由大量可以互相通信、自動感知、自主決策的無人機系統組成的集群系統,該系統具有戰場生存能力強、遂行作戰任務多樣、指揮控制迅速、作戰費效比低、智能協同程度高等作戰優勢,是智能化戰爭中重要的新質作戰力量。無人機蜂群由特定投送平臺(如特種車輛、飛機或艦艇等)在作戰區域外投放,按照作戰要求搭載各類載荷的無人機系統通過云計算、大數據、人工智能算法等關鍵技術形成自主協同的無人作戰蜂群,無人蜂群依靠“算法戰”建立的決策輔助系統在任務規劃指令的引導下遂行偵察預警、誘騙干擾、集群攻擊、智能協同等作戰任務。基于“算法戰”有人-無人協同作戰輔助決策系統如圖3所示。
國外項目研究進展
為了保持戰略、戰術優勢,美軍自上個世紀以來先后制定了三次“抵消戰略”。第一次“抵消戰略”是在20世紀50年代,當時美國依靠核技術優勢,構建起龐大的核武庫,以抵消蘇聯強大的常規力量;第二次“抵消戰略”是在20世紀70年代,美軍啟動“長期研究與規劃”項目,以精確制導武器應對美蘇之間可能發生的戰爭,為贏得對蘇作戰優勢奠定基礎;2014年11月15日,美國國防部發布《國防創新倡議》(Defense Innovation Initiative,DII)提出第三次“抵消戰略”概念,美軍將著眼于籌劃面向未來的“算法戰爭”,通過智能化轉型,抵消中俄等國在裝備規模和硬件技術等方面與美軍的差距,加大武器裝備在智能技術方面與對手的代差,從而謀求和維持美軍未來軍事優勢。機器自主學習、人機協作、機器輔助作業、有人-無人作戰以及網絡自主化作戰能力五大技術領域是實現第三次“抵消戰略”的重要技術支撐。“算法戰”既是實現“第三次抵消戰略”的關鍵,也是實現“第三次抵消戰略”的重要技術保障。2017年4月26日,美國國防部副部長羅伯特·沃克簽署備忘錄,授權建立“算法戰跨職能小組”(Algorithmic Warfare Cross-Functional Team,AWCFT),如圖4所示。AWCFT旨在將美國國防部擁有的海量數據迅速轉變為可用情報,有效促進人工智能、大數據、機器學習等技術在軍事情報領域的應用,AWCFT的成立標志著美國國防部正式提出和認可“算法戰爭”的作戰概念。
美國國防部考慮將“算法戰”應用于“反介入/區域拒止(A2/AD)”作戰、反恐作戰、城市戰、網絡戰、電子戰以及指揮控制等其他作戰領域。“反介入/區域拒止”作戰方面,“算法戰”可以有效提升有人-無人協同作戰能力,實現蜂群作戰系統的智能化管理。反恐作戰方面,“算法戰”通過運用大數據、計算機視覺及模式識別技術,提升戰術無人機系統獲取視頻數據的自動化水平,為反恐作戰提供有力技術支撐。2017年底“算法戰跨職能小組”開發的算法首次在中東部署作戰,該算法可對“全球鷹”無人機系統所拍攝的視頻進行目標識別,對人員、車輛、建筑等物體的識別準確率提升到80%,該算法后續還將陸續部署到“捕食者”和“死神”等無人機系統的相關應用上,首批算法的成功應用標志著“算法戰跨職能小組”步入正軌,也意味著美軍智能化建設逐步進入“快進模式”。目前,美軍“算法戰跨職能小組”已并入聯合人工智能中心,如圖5所示。
“終身學習機器”項目
DARPA于2017年3月啟動了“終身學習機器(Lifelong Learning Machines,L2M)”項目,該項目將研發先進的機器學習算法和神經網絡技術,以增強機器對新環境的適應能力,使得下一代機器學習技術能像智能生物一樣具備自主學習的能力,進而以此為基礎推動未來人工智能(AI)技術的發展。L2M項目重點關注兩個技術領域:一是開發具備提高自我學習能力的系統及其組件,建立可以持續從過往經驗中學習并將所學知識應用于新情況的機器學習機制,從而不斷提升“終身學習機器”能力;二是建立類似智能生物的學習機制,重點關注智能生物如何學習并獲得自適應學習的能力,研究智能生物學習的原理和技術是否能夠應用于機器學習系統。L2M項目團隊預計這兩個技術領域的研究成果將有助于形成新的方法論,使得AI能夠在執行任務過程中不斷提高學習能力,并將先前學習的技術和知識應用于新情況,從而增強自動化作業的安全性。
L2M項目研究進展迅速,加州大學歐文分校研究小組開展了海馬和大腦皮層的雙重記憶結構的研究;塔夫茨大學研究小組分析了蠑螈再生機制,研究了能夠在執行任務過程中通過改變其結構和功能來適應環境變化的柔性機器人;懷俄明大學研究小組根據生物記憶重組方法研發了一種計算系統,該系統使用語境來甄別新的模塊化記憶,從而具有快速適應新情況的能力;哥倫比亞大學研究小組構建了能夠自我復制的神經網絡系統。
DARPA將以L2M項目為基礎推動第三次AI技術浪潮。DARPA認為,第三次AI技術浪潮將以“適應環境”為特征,AI能夠理解環境并發現邏輯規則,從而進行自我訓練并自主建立決策系統,L2M項目與第三次AI技術浪潮的“適應環境”特征相契合,通過研發新一代機器學習技術,使機器具備能夠從環境中不斷學習,不斷總結的能力。
“小精靈”項目
2014年底,美國防部開始制定第三次“抵消戰略”,并把與中、俄等大國對抗定為美軍的主要使命任務。美軍認為,以上假想敵的綜合一體化防空系統對其現役空中裝備的威脅極大,導致B-2在“反介入/區域拒止(A2/AD)”作戰環境中面臨生存威脅,從而嚴重削弱了美軍空中作戰能力。因此,美國國防部考慮以全新作戰概念牽引出更低成本、更高戰力的作戰裝備,以維持對主要假想敵壓倒性的軍事優勢。
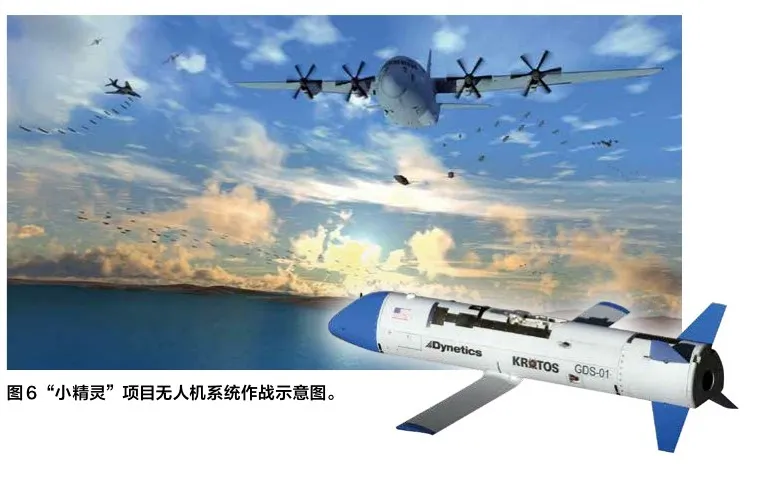
在此背景下,DARPA于2015年9月啟動了“小精靈”(Gremlins)項目,DARPA認為在沒有可靠陸基或海基降落地點的情況下,對于大作戰半徑的小型無人機系統來說,空基回收無人機平臺將是最簡單和最低成本的回收方案,同時具有再次快速發射優勢。“小精靈”項目的作戰模式為在敵防區外由包括運輸機、轟炸機和戰斗機在內的各類平臺將小型無人機平臺集群發射,無人機系統在滲透到敵防區內針對特定目標共同執行情監偵、電子攻擊或地理空間定位等作戰任務,任務完成后由C-130運輸機進行空中平臺回收。“小精靈”項目能支撐分布式空中作戰概念,加強小型無人機系統集群智能算法、自主學習算法、空中發射和回收等關鍵技術研究,提高美軍無人機系統與有人機協同作戰能力,大幅降低作戰成本。
“小精靈”項目目標是評估無人蜂群策略的有效性,并將最佳蜂群策略運用到實戰中。項目分成四個階段進行:第一階段,開展概念研究,研究內容包括發射與回收技術、低成本設計與風險降低技術等;第二階段,完成全尺寸驗證系統初步設計,進一步優化飛行平臺方案,開展回收系統飛行試驗;第三階段,開展大量低成本、可重復使用無人機平臺的發射與回收系統研究,達到能在30min內完成4次回收的目標;第四階段,提高項目的作戰能力,通過約兩年的時間完成X-61A自主性測試,使其具備執行壓制/摧毀敵防空的能力,并使X-61A無人機系統能夠與XQ-58A無人機系統產生“分層效應”,實現有人-無人協同作戰,在未來的作戰環境中減少對跑道的依賴。“小精靈”項目無人機系統作戰示意如圖6所示。
“拒止環境協同作戰”項目
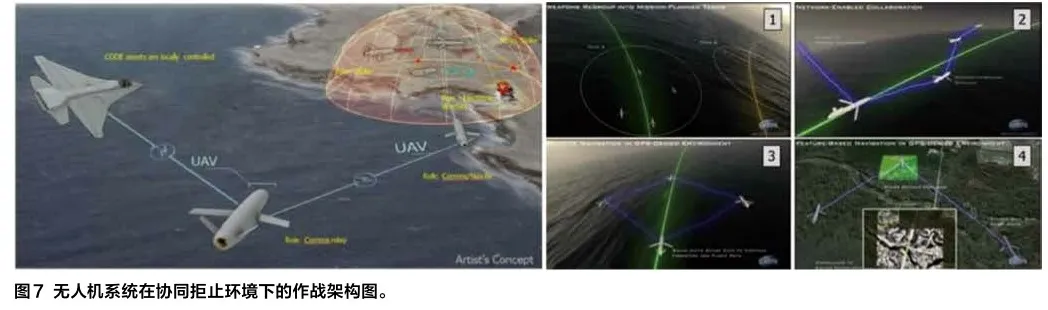
DARPA于2015年1月啟動“拒止環境協同作戰”(Collaborative Operations in Denied Environment,CODE)項目,該項目幫助美軍的無人機系統(UAVS)在拒止環境或有爭議的電磁空域中能夠遠距離執行對地、對海作戰任務。CODE項目具備抗“帶寬限制”以及“通信中斷”功能,能夠提高無人機系統的自主協同能力,多架采用CODE技術的無人機系統可以在一名任務人員的操作下,協同完成探測、跟蹤、識別以及攻擊任務。
CODE項目重點技術領域主要由自主化協同作戰、航空器自主化、監控界面、適用于分布式系統的開放式架構組成。CODE項目分成三個階段進行。第一階段,模擬驗證無人機系統自主戰術協同,確定大約20個可以大大提升UAVS任務能力的自主行為,這些自主行為使得UAVS能夠在拒止或復雜環境中執行作戰任務;第二階段,以RQ-23“虎鯊”無人機系統為測試平臺,配裝相關硬件和軟件,開展平臺飛行試驗,驗證開放架構、自主協同等技術指標;第三階段,在復雜環境下引入更多的無人機系統開展自主協同飛行測試,通過一系列飛行試驗驗證無人機系統的協同作戰能力、生存力和靈巧性,減少未來作戰系統的開發時間和成本。無人機系統在協同拒止環境下的作戰架構如圖7所示。
“駕駛艙機組成員自動化系統”項目
DARPA于2014啟動了“駕駛艙機組人員自動化系統(AircrewLabor InCockpit Automation System,ALIAS)”項目,該項目為直升機和固定翼飛機開發自動駕駛技術。ALIAS項目不僅能自主完成從起飛到著陸的航路規劃、避障、著陸點選擇、自主起降等各種復雜任務,而且也能自主處理飛機系統故障、空中緊急情況等意外事件,從而降低駕駛艙機組人員的工作負荷。ALIAS目標是研發一個感知系統,該系統可以模擬復雜算法,監測任務中的關鍵參數,提高任務的有效性和安全性,通過使用機器人臂控制飛行來減少機組人員數目。ALIAS項目不是用復雜昂貴的自動飛行系統改造飛機,而是設計一種適應性很強的解決方案,該方案能支持機組人員艙內自動駕駛,并能在人工駕駛與自動駕駛之間建立一種緊密的聯系。
ALIAS項目采用模塊化設計,能夠完全依托于現有的飛行系統,這些模塊能執行飛行管理和系統分析程序,容易安裝、調試和拆除。ALIAS有飛機起降、巡航操控、任務規劃、飛行緊急情況處置、飛機系統故障排除、飛行狀態監控、操作過程回放等功能模塊。ALIAS人機界面采用易操作的觸控和聲控模式,不僅能有效提高駕駛員與系統的交互水平,而且還能為某些特定任務提供額外的自動操作或自治飛行服務。ALIAS項目具有快速獲取各種數據并歸納匯編的能力,能夠向機組人員提供各種預選方案和執行飛行效果評估。
ALIAS項目分為三個階段進行。第一階段,開展概念設計,在飛行模擬器上驗證系統架構;第二階段,完成相關飛行試驗,使ALIAS具備自主處置飛行中出現緊急狀況的能力;第三階段,完成ALIAS原型機演示驗證,開展包括起飛、著陸、緊急狀況處置在內的全自動化飛行試驗,驗證ALIAS移植到其他飛機上的可行性。目前,ALIAS已經分別在“鉆石”DA42、塞斯納208“大篷車”、UH-1直升機,以及DHC-2飛機上進行了飛行驗證。極光飛行科學公司在波音737飛機模擬器上運用ALIAS成功地進行了自主飛行驗證,如圖8所示。
結束語
“算法戰”的出現,拉開了智能化戰爭的序幕,顛覆了機械化時代的“平臺中心戰”和信息化時代的“網絡中心戰”的作戰模式。“算法戰”就是將算法運用于戰爭領域,通過挖掘人工智能算法在態勢感知、情報分析、指揮決策和火力打擊等方面擁有的巨大潛力,用算法方式破解戰爭攻防問題,從而達到在戰爭中出奇制勝的目的。
“算法戰”三大核心要素:算法、數據和計算能力,已成為各國軍事能力建設的關鍵。隨著“算法戰”在軍事智能技術上的推廣應用,各類無人機系統的自主感知決策能力、集群協同作戰等能力將得到顯著提升,人與機器將會動態分配共享功能,呈現出功能角色的互換性與流動性,并由此催生出新的戰場法則,從而實現更高形態的人機智能一體作戰方式。