基于新型組網的無人機巡檢任務處理優化方案
2024-08-23 00:00:00解冬東遲猛程衛平馮傳奮米波
無線電工程 2024年7期



摘 要:考慮用戶移動性,特別是在無人機巡檢場景下,由于多接入邊緣計算(Multi-access Edge Computing,MEC)節點服務范圍小,大概率發生任務遷移。任務遷移將增加任務處理的時延和成本。為了降低任務遷移概率,提出了一種新的MEC 組網架構———MEC POOL。在此基礎上,構建了MEC POOL 組網架構下的任務處理效益模型,將任務處理效益最優問題轉換成受限條件下最優解問題。為了解決上述最優解問題,設計了一種基于任務處理效益最優的粒子群算法。實驗結果表明,在發生任務遷移的場景下,MEC POOL 組網方案相比MEC 傳統組網方案,任務處理效益和任務處理時延效益均可提升10% 以上。對于多用戶場景,平均任務處理效益提升8% 以上,平均任務處理時延減少10% 以上。
關鍵詞:無人機巡檢;任務處理;多接入邊緣計算;新型組網
中圖分類號:TN929 文獻標志碼:A 開放科學(資源服務)標識碼(OSID):
文章編號:1003-3106(2024)07-1634-09
0 引言
隨著第五代移動通信(5G)時代的到來,自動駕駛、工業控制和車聯網等領域的應用需求越來越迫切。為了更好地滿足上述領域低時延、計算復雜的應用,引入了多接入邊緣計算(Multi-access EdgeComputing,MEC)的概念[1-2]。具備一定通信、計算資源的MEC 節點部署在靠近用戶的網絡邊緣,用戶可以將實時性高、計算復雜的任務卸載到附近的MEC 節點,實現任務的實時處理。文獻[3 -6]的研信號與信息處理究主要集中在綜合考慮MEC(邊),用戶終端(端)的通信,計算資源如何將任務在邊、端進行卸載處理,以達到任務處理最優。當考慮用戶移動性時,任務處理最優問題將更加復雜。例如,在智慧高速中無人機巡檢場景下,無人機通過機載5G 模組接入5G 網絡,與MEC 節點配合完成高清視頻實時回傳、智能視頻分析等功能。考慮到MEC 服務范圍小,在任務處理過程中,大概率會發生任務遷移,進而增加任務處理時延及成本。針對任務遷移優化問題,總體上有2 種解決思路。
一種解決思路是通過構建模型并利用相關算法實現最優的任務遷移,來降低任務處理時延和成本。文獻[7]利用馬爾科夫決策過程、文獻[8 -12]利用強化學習、文獻[13]利用最短路徑算法、文獻[14]利用遺傳算法、文獻[15]利用合作博弈算法、文獻[16-17]利用李雅普諾夫優化等各種模型、算法來解決任務遷移優化問題。但上述思路未能降低任務遷移的發生。另一種解決思路是通過設計新型網絡架構來降低任務遷移概率。文獻[18]提出了一種SharedMEC 網絡架構。在這個架構中,每個基站(Base Station,BS)都有一個MEC 為其服務,一群BS共享SharedMEC 節點。當發生任務遷移時,將任務遷移到SharedMEC 節點上,后續由SharedMEC 節點處理。雖然上述網絡架構降低了任務遷移概率,但SharedMEC 網絡架構需要額外新增關鍵網元SharedMEC 節點,不僅增加了系統成本,而且SharedMEC 節點一旦故障,將大大降低系統性能。
為了解決現有方案中的上述缺點,針對用戶終端高速移動場景,提出了一種基于MEC 新型組網的任務處理優化方案。一方面,降低了任務遷移概率,進而降低任務處理時延和成本,提升了任務處理效益;另一方面,提升了MEC 組網的魯棒性。本文主要貢獻包括以下3 點:
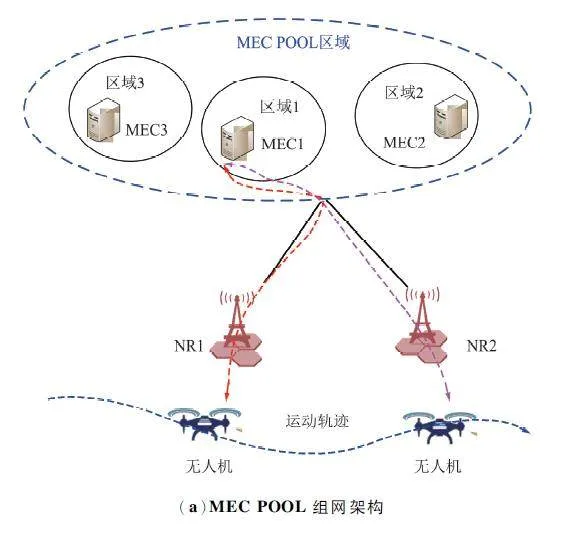
① 首次提出了一種MEC 新型組網架構。多個MEC 組成一個MEC 池(MEC POOL)。用戶終端與MEC POOL 區域內所有MEC 互聯,MEC POOL 區域內所有MEC 的服務區域之和是MEC POOL 的服務區域。用戶終端在MEC POOL 服務區域內移動時,不會更改為其服務的MEC,降低了任務遷移概率,進而提升了任務處理效益。此外,當MEC POOL 區域內某MEC 宕掉后,其他的MEC 可以接管繼續為原用戶終端提供服務,提升了MEC 組網的魯棒性。
② 分3 類場景提出了MEC POOL 組網架構下任務處理流程,并在資源受限情況下,綜合考慮通信、計算和能耗等因素,搭建了MEC POOL 組網架構下任務處理時延、能耗、成本及效益模型。
③ 設計了一種基于系統效益最優的任務處理方案,并揭示了MEC POOL 組網架構下任務處理的規律。
實驗結果表明,在發生任務遷移的情況下,本文設計的MEC POOL 組網方案的任務處理效益相比傳統組網方案的任務處理效益可以提升10% 以上。對于多用戶場景,平均任務處理效益提升8% 以上,平均任務處理時延減少10% 以上。
1 MEC 新型組網架構
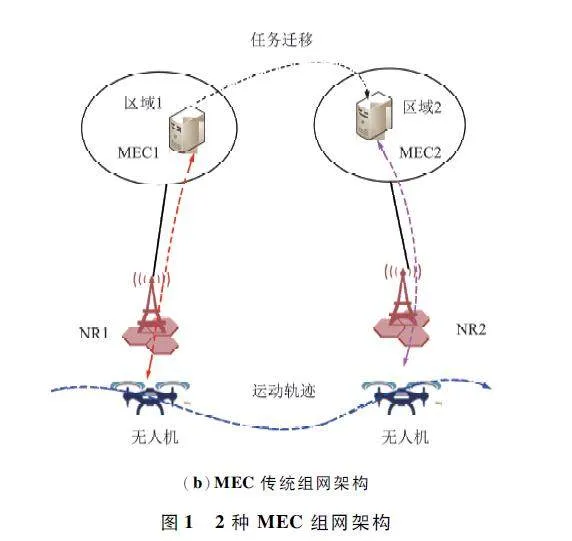
以智慧高速中無人機巡檢為例,MEC 新型組網架構如圖1 (a)所示。3 個MEC 組成一個MECPOOL,無人機通過5G 新空口(New Radio,NR)與MEC POOL 區域內所有MEC 互聯。無人機在MECPOOL 的服務區域內移動時,不會更改為其服務的MEC。例如,根據任務卸載策略,無人機通過NR1將任務卸載到MEC1 進行處理。在任務處理過程中,無人機運動到NR2 覆蓋區域。任務還可以繼續由MEC1 進行處理,處理后的結果通過NR2 回傳給無人機。而在傳統MEC 組網架構下,如圖1(b)所示,將發生任務遷移,任務將從MEC1 遷移到MEC2進行處理,進而增加了任務處理時延和成本。此外,當MEC POOL 區域內某MEC 宕掉后,其他的MEC可以接管繼續為原無人機提供服務,提升了MEC 組網的魯棒性。
2 MEC 新型組網架構下任務處理流程
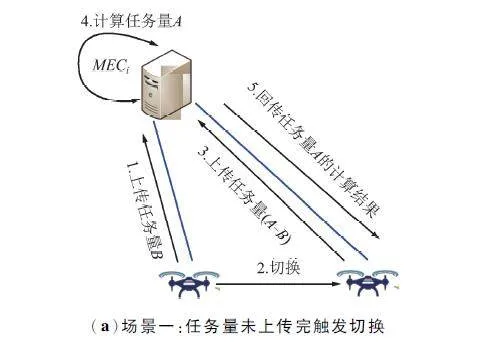
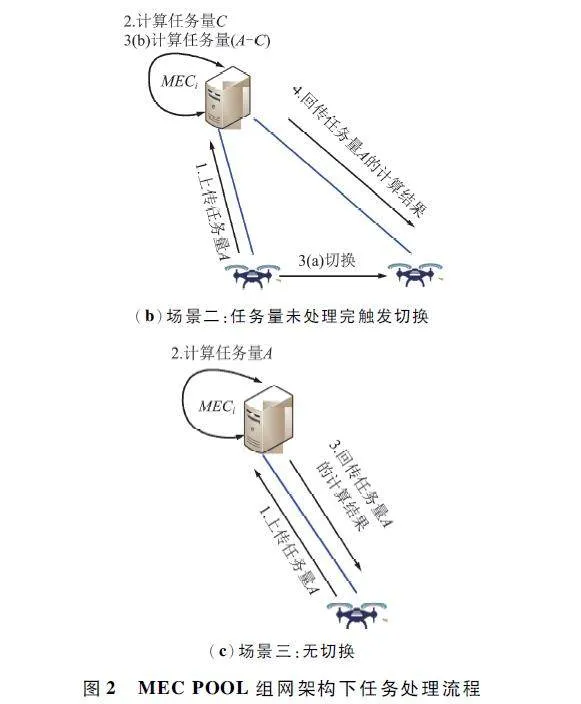
MEC POOL 組網架構下任務處理分為3 類場景,以智慧高速中無人機巡檢為例,具體任務處理流程如圖2 所示。為無人機服務的MEC 為MECi,無人機需要處理的任務量為A。
對于場景一,無人機將任務量B(B<A)卸載到MECi 后,由于高速移動,無人機發生NR 切換。但基于MEC POOL 組網,無人機切換后仍由MECi 為其服務。無人機需要將剩余任務量(A-B)卸載給MECi,由MECi 處理任務并將任務處理結果回傳給無人機,如圖2(a)所示。
對于場景二,無人機將任務量A 卸載到MECi,MECi 處理完成任務量C(C<A)后,無人機發生NR切換。基于MEC POOL 組網,無人機切換后仍由MECi 為其服務。MECi 將繼續處理未完成的任務并將任務處理結果回傳給無人機。需說明,圖2(b)中所示的3(a)、3(b)兩個步驟在時間上是并行。
對于場景三,在任務處理過程中均未發生NR切換,如圖2(c)所示。
3 任務處理優化方案
為了更好地降低任務處理時延和成本,需要基于MEC、無人機的通信、計算資源,綜合考慮任務處理的時延、能耗和成本對任務處理進行優化。本節基于前述MEC POOL 組網架構下任務處理流程,對任務處理時延、能耗、成本及效益進行分析建模。
3. 1 任務處理時延
任務處理時延包含任務通信時延、任務計算時延和任務遷移時延。
① 任務通信時延
基于上述任務處理流程,無人機與MECi 之間任務通信時延Tcomi (xi,Tcti )表示為:
式中:xi 表示無人機需要卸載到MECi 進行處理的任務量,Tcti 表示無人機與MECi 的連接時間,VuRi 表示無人機切換前與MECi 上行鏈路傳輸速率,VuRH 表示無人機切換后與MECi 上行鏈路傳輸速率,VdRH 表示無人機切換后與MECi 下行鏈路傳輸速率,ρxi 表示任務xi 的計算處理結果,VdRi 表示無人機切換前與MECi 下行鏈路傳輸速率,Trecvi (xi )表示任務量xi卸載到MECi 的傳輸時間。
Trecvi (xi) = xi/VuRi。(2)
Tproci (xi )為任務量xi 在MECi 的計算時間,表示為:
Tproci (xi) = xi/VCi, (3)
式中:VCi 為MECi 的計算速率。
Tsendi (xi)為任務xi 的計算結果ρxi 從MECi 回傳到無人機的傳輸時間,表示為:
Tsendi (xi) = ρxi/VdRi。(4)
② 任務計算時延
任務計算時延包含MECi 計算時延和無人機計算時延。
MECi 計算時延表示為:
Tcompi (xi,Tcti ) = xi/VCi。(5)
無人機計算時延表示為:
Tcompl (xi) = (W - xi)/VCl, (6)
式中:W 為需要處理的任務總量,VCl 為無人機計算速率。
③ 任務遷移時延
在MEC POOL 組網架構下不會發生任務遷移,僅發生無人機NR 切換,則任務遷移時延表示為:
Tmigi = THO , (7)
式中:THO 為無人機NR 切換時延。
根據上述任務通信時延、計算時延和遷移時延,任務處理時延表示為:
式中:T1 為圖2(b)場景二的任務處理時延,考慮了圖2(b)中所示的3(a)、3(b)兩個步驟在時間上是并行;T2 為其他場景下的任務處理時延。
具體地:
3. 2 任務處理能耗
任務處理能耗包含無人機計算能耗、任務傳輸能耗和MEC 計算能耗。
① 無人機計算能耗
無人機計算能耗表示為:
Elocali (xi) = (W - xi)PCl, (11)
式中:PCl 為無人機計算單比特能耗。
② 任務傳輸能耗
任務傳輸能耗表示為:
Etrani (xi,Tcti ) = PRl(xi + ρxi), (12)
式中:PRl 為無人機發送/ 接收單比特能耗。
根據無人機計算能耗和任務傳輸能耗可以得到任務處理中無人機能耗為:
El(xi,Tcti ) = Elocali (xi)+ Etrani (xi,Tcti )。(13)
③ MEC 計算能耗
MECi 計算能耗表示為:
EcompMECi(xi,Tcti ) = PCi Tcompi (xi,Tcti ), (14)
式中:PCi 為MECi 單位時間計算能耗。基于上述三方面能耗,任務處理能耗表示為:
E(xi,Tcti ) = Elocali (xi)+ Etrani (xi,Tcti )+ EcompMECi(xi,Tcti )。(15)
3. 3 任務處理成本
任務處理成本包括通信成本、計算成本、遷移成本、能耗成本和空閑成本。
① 通信成本
通信成本表示為:
Ccomi (xi,Tcti ) = α[Tcomi (xi,Tcti )], (16)
式中:α 為單位時間的通信成本。
② 計算成本
計算成本表示為:
Ccompi (xi,Tcti ) = β[Tcompi (xi,Tcti )+ Tcompl (xi)], (17)
式中:β 為單位時間的計算成本。
③ 遷移成本
遷移成本表示為:
Cmigi = γTmigi , (18)
式中:γ 為單位時間的遷移成本。
④ 能耗成本
能耗成本表示為:
Cei(xi,Tcti ) = ε[Elocali (xi)+ Etrani (xi,Tcti )+ EcompMECi(xi,Tcti )],(19)
式中:ε 為單位能耗的成本。
⑤ 空閑成本
當MECi 已經將任務處理結果全部回傳給無人機但仍與無人機連接時,將會影響其他無人機的接入。因此,空閑成本表示為:
Cidlei (xi,Tcti ) = δTidlei (xi,Tcti ), (20)
式中:δ 為單位時間的空閑成本,Tidlei (xi,Tcti )為空閑時間。
式中:Ttotali (xi)為MECi 處理任務量xi 所需時間。
Ttotali (xi) = Trecvi (xi)+ Tproci (xi)+ Tsendi (xi)。(22)
3. 4 任務處理效益
任務處理效益定義為:相比無人機獨立處理任務,由MEC 和無人機協同處理任務時降低的任務處理成本。任務處理效益包括任務處理時延效益和任務處理能耗效益。任務處理時延效益表示為:
Qci(xi,Tcti ) = β WVCl- Ccomi (xi,Tcti )- Ccompi (xi,Tcti )-Cmigi - Cidlei (xi,Tcti )。(23)
任務處理能耗效益表示為:
Qei(xi,Tcti ) = εWPCl - Cei(xi,Tcti )。(24)
任務處理效益Zi,j(xi,Tcti )表示為:
Zi,j(xi,Tcti ) = ηi Qci(xi,Tcti )+ ηj Qei(xi,Tcti ), (25)
式中:ηi 與任務處理優先級有關,任務處理優先級越高,則ηi 取值越大;ηj 與系統剩余能量有關,系統剩余能量越多,則ηj 取值越小,相應的ηi 取值越大。
3. 5 優化問題構建
基于上述模型,任務處理優化問題可以轉換為在考慮任務處理時延、無人機能耗限制的情況下,最大化任務處理效益。轉換后的優化問題可以表示為:
式中:Dm 為任務完成最大持續時間,EthUE 為無人機能耗閾值。
4 基于任務處理效益最優的粒子群算法
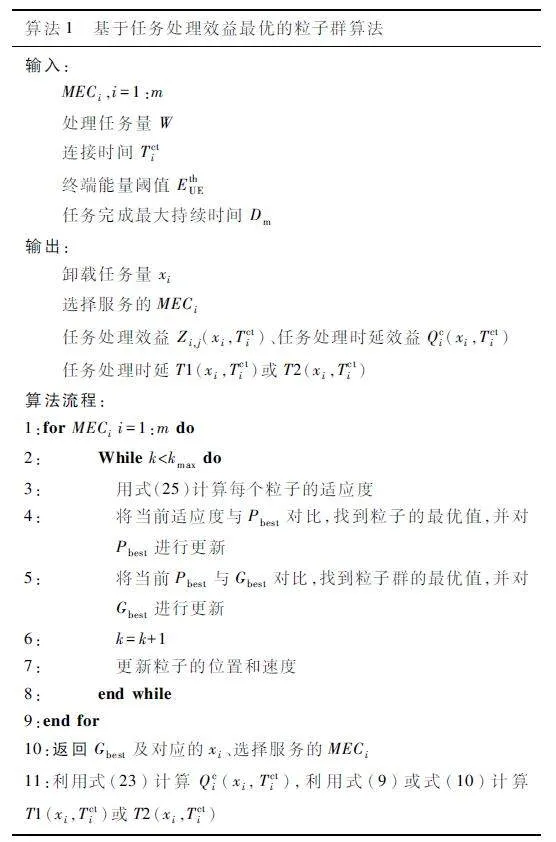
本文將任務處理效益最優轉化成多目標受限條件下最優解的問題。為了解決上述混合整數非線性規劃問題,引入粒子群算法來進行優化。每個粒子都通過式(25)計算各自的適應度,然后粒子們追隨當前的最優粒子在解空間中進行搜索。基于任務處理效益最優的粒子群算法如算法1 所示。
算法中,Pbest 為單個粒子最優值,Gbest 為粒子群最優值,kmax 為循環次數。
5 結果評估
圖1(a)作為實驗場景,實驗中各參數設置如下:無人機需要處理的任務量為250 Mb,任務完成截止時間為70 s,無人機與MEC 連接時間為15 s,無人機能耗閾值為100 J。MEC1、MEC2、MEC3 的計算能力、通信速率及計算功耗依次降低。本實驗中的其他參數參考文獻[19-20]進行設置。
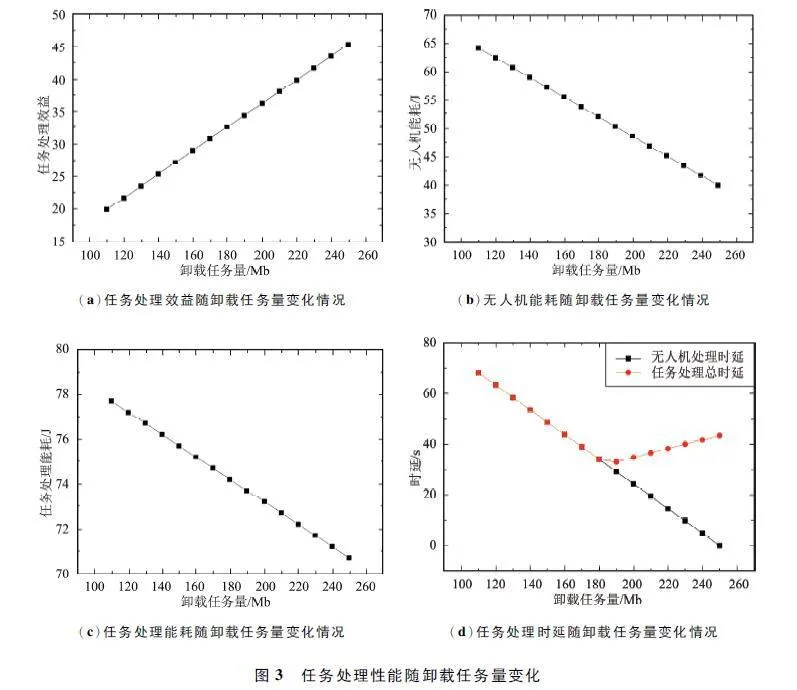
任務處理性能隨卸載任務量變化情況如圖3 所示。當卸載量小于110 Mb 時,任務處理時延大于任務完成最大持續時間,故未在圖3 中體現。
從圖3 可以看出,任務處理效益隨著卸載任務量的增加而增加,無人機能耗、任務處理能耗隨著卸載任務量的增加而降低,體現了端、邊協同的優勢。而對于任務處理時延,隨著卸載任務量的增加先下降后上升。原因如下:考慮到無人機任務處理和MEC 任務處理是并行的,在任務卸載量小于190 Mb時,無人機任務處理時延大于MEC 任務處理時延,任務處理時延由無人機任務處理時延決定,故任務處理時延隨卸載任務量增加而降低。當任務卸載量超過190 Mb 時,MEC 任務處理時延將超過無人機任務處理時延,任務處理時延由MEC 任務處理時延決定,故任務處理時延隨著卸載任務量的增加而增加。
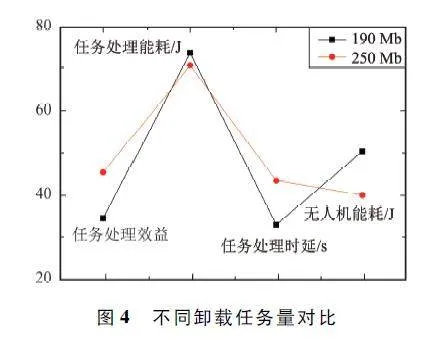
雖然任務處理時延在卸載任務量為190 Mb 時最小,但無人機能耗、任務處理能耗相比卸載任務量為250 Mb 時較大,故任務處理效益不是最高。卸載任務量為190、250 Mb 時,任務處理效益、任務處理能耗、任務處理時延及無人機能耗對比如圖4 所示。從上述對比看出,當任務完成截止時間較小時,需要在任務處理時延和任務處理效益之間進行權衡。如果任務完成截止時間不超35 s,則任務卸載量為200 Mb 時,在滿足任務處理時延的同時,任務處理效益最高。
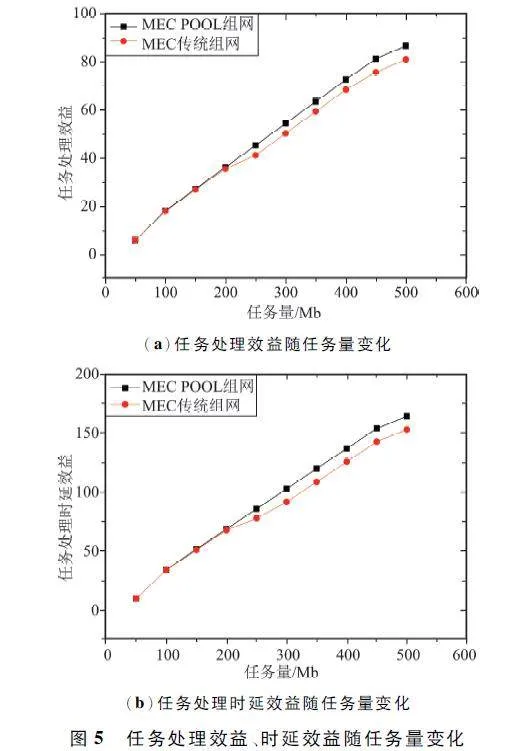
任務處理效益、時延效益隨任務量變化情況如圖5 所示。其中,連接時間為15 s。從圖5(a)可以看出,在相同的任務量下,本文提出的MEC POOL組網方案的任務處理效益高于MEC 傳統組網方案。當任務量小于100 Mb 時(對應圖2 中場景三),由于MEC 傳統組網方案中不會發生任務遷移,因此上述2 種組網方案的任務處理效益沒有差異。當任務量在100 ~ 230 Mb 時(對應圖2 中場景二),MEC 傳統組網方案中會發生任務遷移,但遷移的是任務處理或部分處理的結果。由于上述遷移量較小,2 種方案的任務處理效益相差不大。當任務量大于230 Mb(對應圖2 中場景一)時,MEC 傳統組網方案將發生大量的任務遷移,因此2 種方案的任務處理效益差異較大。在場景一發生任務遷移情況下,本文提出的MEC POOL 組網方案的任務處理效益比MEC 傳統組網方案提升6% ~ 11% 。任務處理時延效益隨任務量的變化如圖5(b)所示。2 種組網方案的任務處理時延效益變化趨勢與任務處理效益的變化趨勢相似。相比MEC 傳統組網方案,在場景一發生任務遷移情況下,本文提出的MEC POOL 組網方案的任務處理時延效益提升7% ~ 11% 。
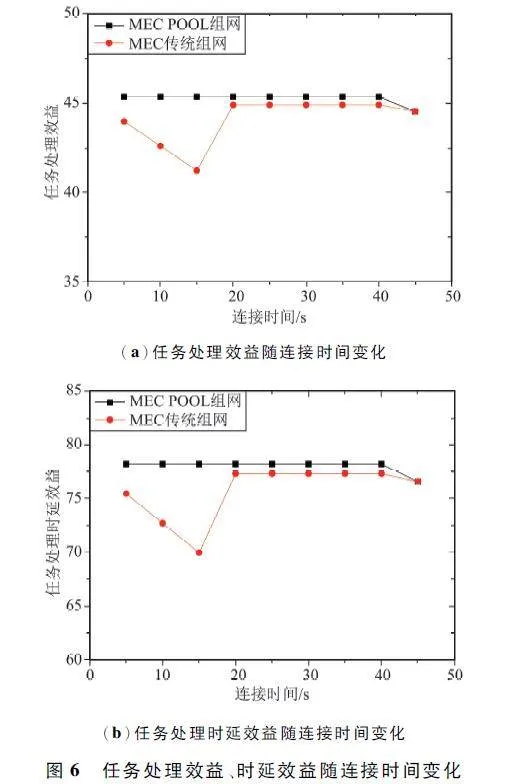
任務處理效益、時延效益隨連接時間變化情況如圖6 所示。其中,處理任務量為250 Mb。從圖6(a)可以看出,本文提出的MEC POOL 組網方案的任務處理效益高于MEC 傳統組網方案。當連接時間小于15 s(對應圖2 中場景一)時,MEC 傳統組網方案將發生大量任務遷移,因此2 種方案的任務處理效益差異很大。當連接時間在20 ~ 40 s 時(對應圖2 中場景二),MEC 傳統組網方案中會發生任務遷移,但遷移是任務處理或部分處理的結果,2 種方案的任務處理效益相差不大。當連接時間大于40 s 時(對應圖2 中場景三),由于MEC 傳統組網方案中沒有任務遷移,因此上述2 種方案的任務處理效益沒有差異。在場景一發生任務遷移情況下,本文提出的MEC POOL 組網方案的任務處理效益比MEC 傳統組網方案提升5% ~ 11% 。任務處理時延效益隨連接時間的變化如圖6 (b)所示。2 種組網方案的任務處理時延效益變化趨勢與任務處理效益的變化趨勢相似。在場景一發生任務遷移情況下,本文提出的MEC POOL 組網方案的任務處理時延效益比MEC 傳統組網方案提升5% ~ 12% 。
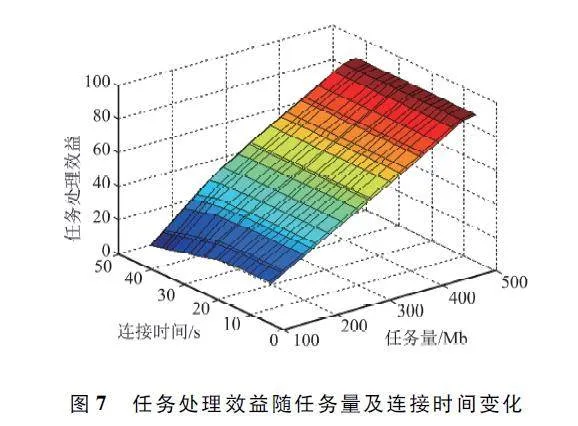
任務處理效益隨任務量和連接時間的變化情況如圖7 所示。當任務量較小時,由于空閑成本導致任務處理效益隨著連接時間的增加而降低。當任務量較大時,任務處理效益不會隨著連接時間而變化。當連接時間較小時,任務處理效益會隨著任務量的增加而增加。當連接時間較大時,隨著任務量的增加,空閑成本逐漸消失,導致任務處理效益隨著任務量的增加而快速增加。上述變化趨勢與圖5 和圖6完全吻合。
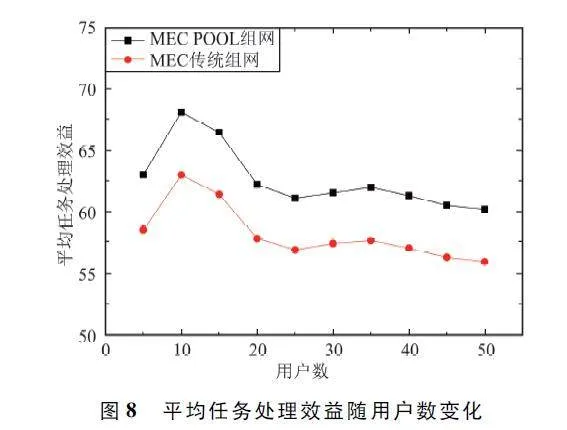
多用戶場景下MEC POOL 組網和MEC 傳統組網的任務處理效益對比如圖8 所示。待處理的任務量在200 ~ 500 Mb 隨機取值。連接時間在10 ~ 20 s隨機取值。盡管2 種MEC 組網方案的平均任務處理效益都隨著用戶數量的變化而波動,但平均任務處理效益的標準差小于2. 5。與MEC 傳統組網方案相比,在多用戶場景下,本文提出的MEC POOL組網方案的平均任務處理效益提升8% 以上。
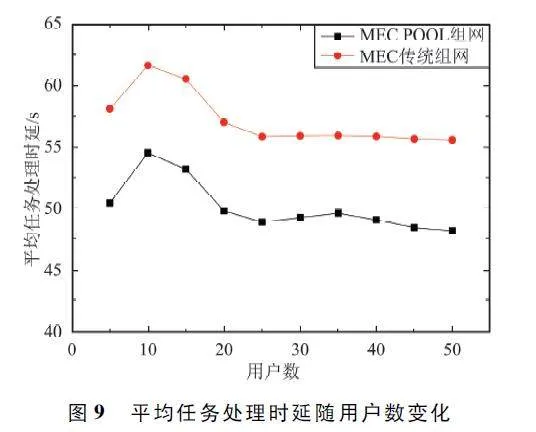
多用戶場景下MEC POOL 組網和MEC 傳統組網的平均任務處理時延對比如圖9 所示。與平均任務處理效益類似,盡管2 種MEC 組網方案的平均任務處理時延都隨著用戶數量的變化而波動,但平均任務處理時延的標準差小于2. 1。在多用戶場景下,本文提出的MEC POOL 組網方案與MEC 傳統組網方案相比,平均任務處理時延減少10% 以上。主要原因是在本文提出的MEC POOL 組網方案中,不會發生任務遷移。
此外,從圖8 和圖9 可以看出,平均任務處理效益和平均任務處理時延隨用戶數變化趨勢相似,主要原因是高的平均任務處理時延意味著要處理的平均任務量大,相應的平均任務處理效益也大。
6 結束語
針對智慧高速中無人機巡檢場景,為了降低任務遷移概率,提出了一種新的網絡架構,即MECPOOL 架構。基于上述組網架構,分3 類場景提出了任務處理流程。在資源受限情況下,綜合考慮連接時間、任務量、通信資源、計算資源和能耗等因素,搭建了MEC POOL 組網架構下任務處理時延、能耗、成本及效益模型。設計了一種基于系統效益最優的任務處理優化方案,并揭示了MEC POOL 組網架構下任務處理規律。此外,為了解決上述多目標受限條件下最優解問題,設計了基于任務處理效益最優的粒子群算法,給出最優的任務卸載策略。實驗結果表明,在一定的連接時間下,任務處理效益隨著卸載任務量的增加而增加,無人機能耗隨著卸載量的增加而降低。而對于實時性要求高的任務,需要在任務處理時延和任務處理效益之間進行權衡。在發生任務遷移場景下,本文提出的MEC POOL 組網方案相比MEC 傳統組網方案,任務處理效益和任務處理時延效益提升均可達10% 以上。對于多用戶場景,本文提出的MEC POOL 組網方案相比MEC傳統組網方案,平均任務處理效益提升8% 以上,平均任務處理時延減少10% 以上。
參考文獻
[1] YUAN H T,BI J,TAN W,et al. Temporal Task Schedulingwith Constrained Service Delay for Profit Maximization inHybrid Clouds[J]. IEEE Transactions on Automation Science and Engineering,2017,14(1):337-348.
[2] WANG Y,LIU M,YANG J,et al. Datadriven DeepLearning for Automatic Modulation Recognition inCognitive Radios [J ]. IEEE Transactions on VehicularTechnology,2019,68(4):4074-4077.
[3] REN J K,YU G D,HE Y H,et al. Collaborative Cloud andEdge Computing for Latency Minimization [J ]. IEEETransactions on Vehicular Technology,2019,68 (5 ):5031-5044.
[4] KIRAN N,PAN C Y,WANG S H,et al. Joint Resource Allocation and Computation Offloading in Mobile Edge Computing for SDN Based Wireless Networks [J]. Journal ofCommunications and Networks,2020,2(1):1-11.
[5] ZENG S,HUANG X H,LI D D. Joint Communication andComputation Cooperation in Wirelesspowered MobileedgeComputing Networks with NOMA [J]. IEEE Internet ofThings,2023,10(11):9849-9862.
[6] 徐昌彪,劉楊,劉遠祥,等. 基于多重指標的MEC 服務器選擇方案[J]. 重慶郵電大學學報(自然科學版),2020,32(3):329-335.
[7] YANG G S,HOU L,HE X Y,et al. Offloading Time Optimization via Markov Decision Process in Mobileedge Computing [J ]. IEEE Internet of Things,2021,8 (4 ):2483-2493.
[8] CHEN X,LIU G Z. Joint Optimization of Task Offloading andResource Allocation via Deep Reinforcement Learning forAugmented Reality in Mobile Edge Network [C]∥ 2020IEEE International Conference on Edge Computing(EDGE).Beijing:IEEE,2020:76-82.
[9] XU J W,LIU X,ZHU X R. Deep Reinforcement LearningBased Computing Offloading and Resource Allocation Algorithm for Mobile Edge Networks[C]∥2020 IEEE 6th International Conference on Computer and Communications(ICCC). Chengdu:IEEE,2020:1542-1547.
[10] WU Z Y,YAN D F. Deep Reinforcement LearningbasedComputation Offloading for 5G Vehicleaware MultiaccessEdge Computing Network [J]. China Communications,2021,18(11):26-41.
[11] ZHANG Y Q,LI R G,ZHAO Y Q. Deep ReinforcementLearning Based Mobilityaware Service Migration for Multiaccess Edge Computing Environment [C]∥ 2022 IEEESymposium on Computers and Communications (ISCC).Rhodes:IEEE,2022:1-6.
[12] ZHANG X Y,WANG J X,WANG B,et al. OffloadingStrategy for UAVassisted Mobile Edge Computing Based onReinforcement Learning[C]∥2022 IEEE/ CIC InternationalConference on Communications in China(ICCC). Sanshui:IEEE,2022:702-707.
[13] THANANJEYAN S,CHAN C A,WONG E,et al. Mobilityaware Energy Optimization in Hosts Selection for Computation Offloading in Multiaccess Edge Computing[J]. IEEEOpen Journal of the Communications Society,2020,1:1056-1065.
[14] YANG H,GUO X,LI M L. DNN Application OrientedMigration Scheduling Strategy Based on Genetic Algorithm[C]∥ 2020 39th Chinese Control Conference (CCC ).Shenyang:IEEE,2020:4296-4301.
[15] 張海波,程妍,劉開健,等. 車聯網中整合移動邊緣計算與內容分發網絡的移動性管理策略[J]. 電子與信息學報,2020,42(6):1444-1451.
[16] 吳大鵬,呂吉,李職杜,等. 移動性感知的邊緣服務遷移策略[J]. 通信學報,2020,41(4):1-13.
[17] LABRIJI I,STRINATI E C,PERRAUD E,et al. DynamicMigration Strategy for Mobile Multiaccess Edge ComputingServices [C]∥2022 IEEE Wireless Communications andNetworking Conference (WCNC ). Austin:IEEE,2022:710-715.
[18] NASRIN W,XIE J. SharedMEC:Sharing Clouds to SupportUser Mobility in Mobile Edge Computing [C ]∥ 2018IEEE International Conference on Communications(ICC).Kansas:IEEE,2018:1-6.
[19] CHEN M H,LIANG B,DONG M. Joint Offloading and Resource Allocation for Computation and Communication inMobile Cloud with Computing Access Point [C]∥ IEEEINFOCOM 2017IEEE Conference on Computer Communications. Atlanta:IEEE,2017:1-9.
[20] PLACHY J,BECVAR Z,STRINATI E C,et al. DynamicAllocation of Computing and Communication Resources inMultiaccess Edge Computing for Mobile Users [J]. IEEETransactions on Network and Service Management,2021,18(2):2089-2106.
作者簡介
解冬東 男,(1988—),碩士,高級工程師。主要研究方向:智慧交通建設、信息化管理。
遲 猛 男,(1981—),碩士,高級工程師。主要研究方向:交通信息工程及控制、邊緣計算。
程衛平 男,(1979—),工程師。主要研究方向:智能交通管控與綜合服務。
馮傳奮 男,(1980—),博士,教授級高級工程師。主要研究方向:5G、邊緣計算。
米 波 男,(1983—),工程師。主要研究方向:5G 信息化、通信技術在交通行業應用等。
基金項目:山東省交通運輸廳科技計劃項目(2022B51)
