基于地基雷達的月球成像綜述
2024-08-23 00:00:00王瑞剛夏雙志金松坡蘇彥王紫婷
無線電工程 2024年7期
關鍵詞:信號




摘 要:基于地基雷達的月球成像有利于研究地月系統及太陽系演化等科學問題,可以為登陸任務中的著陸區選址提供有力的科學依據,也有助于驗證用于深空探測的地基雷達設備的可行性。地基雷達具有穿透性強、全天候、全天時和低成本等優勢,國內外已開展一系列基于地基雷達對月球成像的工作,成像方法主要包括時延多普勒方法及干涉成像方法。在不同階段,采用不同的地基雷達設備和參數,獲得了一系列不同分辨率的月球正面圖。梳理了國內外地基雷達設備及其參數、成像方法及探測結果等,展望了基于地基雷達設備對月球進行成像的發展趨勢。
關鍵詞:地基雷達;月球成像;時延多普勒;干涉成像
中圖分類號:P165 文獻標志碼:A 開放科學(資源服務)標識碼(OSID):
文章編號:1003-3106(2024)07-1749-11
0 引言
月球是距離地球最近的天體,也是人類最早開始研究的天體。人類對月球的探索和認識大致經歷了3 個階段。第一個階段為肉眼觀測時代,掌握了月相變化規律,粗略地估計了地月距離等;第二個階段為光學觀測(望遠鏡)時代,繪制了月球正面圖,劃分了月表地質單元,揭示了地月系統的力學原理等;第三個階段為多源觀測時代,雷達、光譜和能譜等各種技術的發展使得月球探測進入全新時代,通過多源數據可以揭示更多的科學信息,確定了月球的殼層結構,揭示了月球表面火山及隕石撞擊歷史活動等,對月球的認識更加全面和深入。
Watt 于1937 年設計了第一部雷達,最早用于目標探測和測距。隨著設備制造工藝及信號處理方法的不斷改進,地基雷達性能極大提升,相比其他探測手段,優勢更加明顯,地基雷達也逐步應用于深空探測領域[1]。根據探測技術手段的不同,地基雷達對月球的探測可以分為3 個階段,分別為初始探測階段、時延多普勒成像階段及三維成像階段。1946 年,美國通過軍用雷達首次獲得了月球回波信號[2-3],象征著地基雷達對月球成像初始探測階段的開始。在初始探測階段期間,利用回波計算了地月距離、月球赤道直徑、表面反射率和粗糙度等參數[4-5],開展了尋找水冰[6]等科學研究。20 世紀60 年代左右,Green 等提出了時延多普勒概念,Pettengill 等利用磨石山(Millstone)雷達進行了驗證[7],拉開了利用時延多普勒方法對月球進行二維成像的序幕。自20 世紀60 年代末開始,美國阿波羅任務的實施推動了地基雷達的大力發展。通過不同設備,使用不同參數,獲得了一系列不同分辨率的月球反射率圖。1972 年,Zisk 利用地基雷達干涉模式首次獲得了月球局部高程圖,基于地基雷達的月球探測進入三維探測階段,后續獲得了一系列月球局部區域高程圖,為阿波羅登月任務著陸點選址提供了有力保障,同時也為研究月球表面地形地貌、劃分地質單元提供了依據。
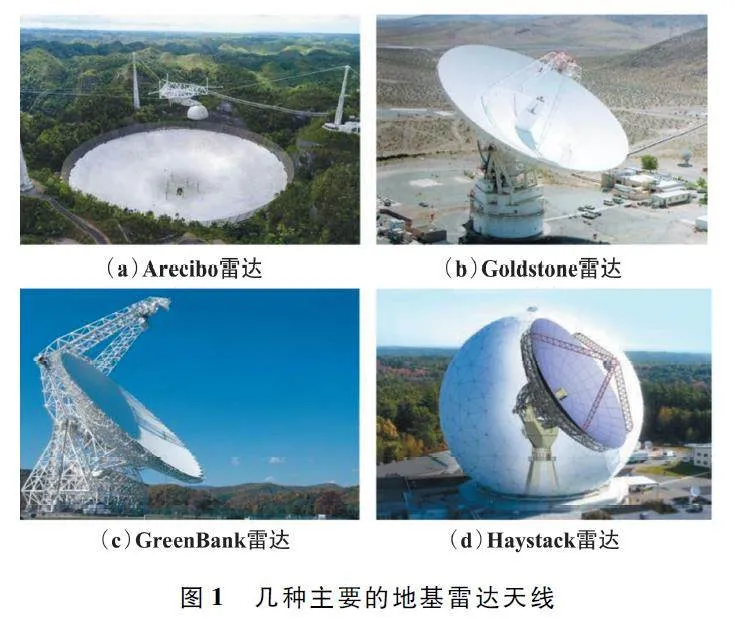
國外的主要的地基雷達設備包括阿雷西博(Arecibo)雷達、金石(Goldstone)雷達、干草堆(Hay-stack)雷達和Millstone 雷達等。Arecibo 是使用最為廣泛的地基雷達,現已無法正常運行。Goldstone 是目前最主要的深空探測地基雷達,可以對月球進行高分辨率成像。Haystack 是最早使用的月球成像雷達之一,Millstone 最早用于驗證時延多普勒方法,隨著Arecibo 和Goldstone 的投入使用,Haystack 和Millstone 目前主要用于近地目標探測[8]。此外,美國正在嘗試天線組陣測試,包括深空探測網的3 個34 m 天線及Kaboom 的3 個12 m 天線。
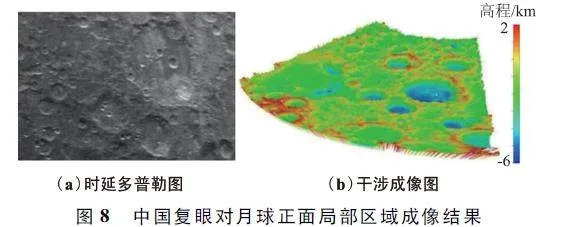
在地基雷達領域,我國目前還沒有投入使用的專門用于月球及深空探測的地基雷達設備。我國的前期研究主要側重于算法及基于國外地基雷達探測數據的分析,雖然前期也利用國內非相干散射雷達進行了探測嘗試,但分辨率與國外存在差距。目前,我國地基雷達處于起步階段,中國復眼第一期4 個16 m 口徑天線已經順利完成任務,獲得了月球正面全局圖及局部的地形地貌圖。后續二期25 個30 m口徑天線已開工建設,未來三期將建設100 個天線陣列。三亞的非相干散射雷達(SYISR)主要用于探測電離層,但也具備月球探測能力,在月球成像中獲得了較好的結果[9]。
1 國內外現狀
從地基雷達首次獲得月球回波至今,雷達設備工藝及信號處理方法在不斷提升,得到的圖像的信噪比和分辨率在不斷提高。
1. 1 國外地基雷達及研究進展
1. 1. 1 國外地基雷達設備及參數
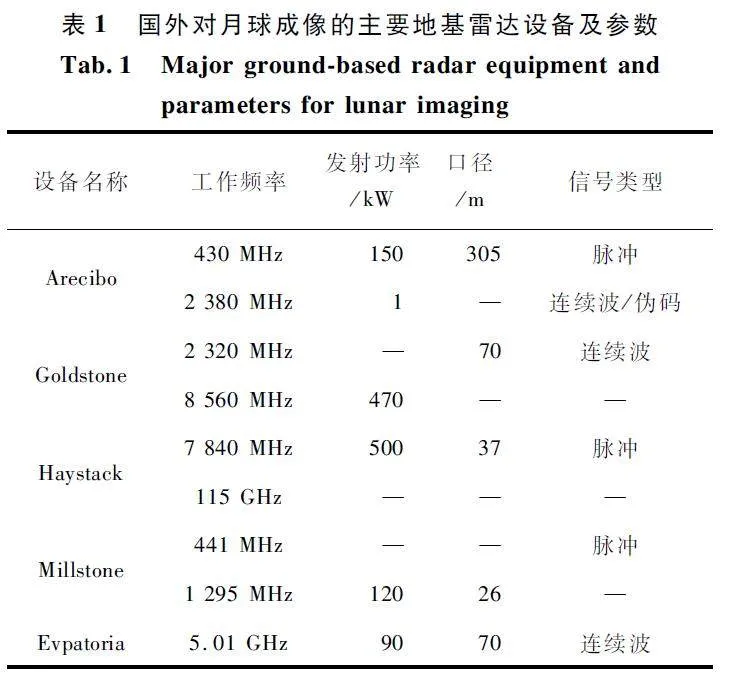
國外可用于月球成像的主要地基雷達設備及參數如表1 所示,主要包括Arecibo、Goldstone、Haystack、Millstone 及Evpatoria 等[6,10-11]。由于Arecibo 停止運行,其他地基雷達功能定位發生調整,目前對月球成像主要依靠Goldstone 雷達。
1. 1. 2 研究進展
國外基于地基雷達對月球的探測數據,開展了一系列對月球成像的研究工作。對于同一地基雷達,由于在不同階段采用的雷達參數及處理算法不同,使得不同時間得到的成像效果存在差異。
(1)Arecibo
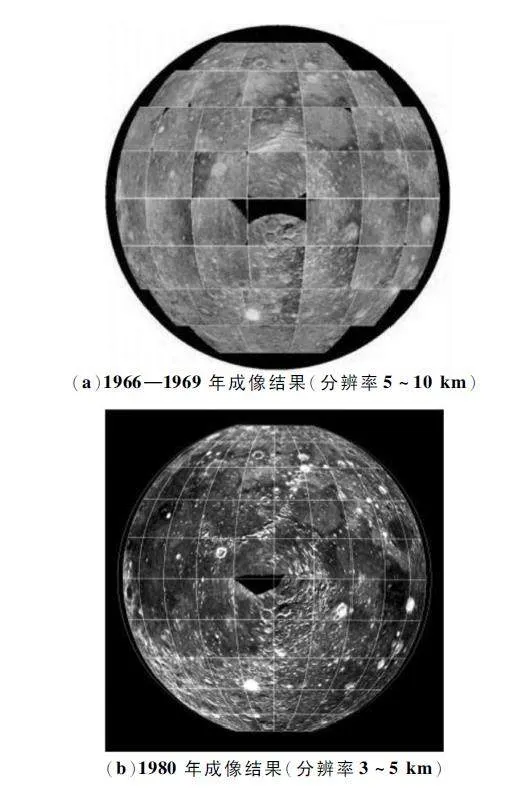
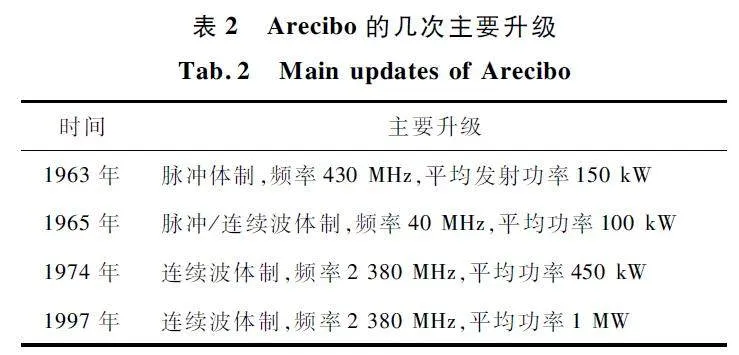
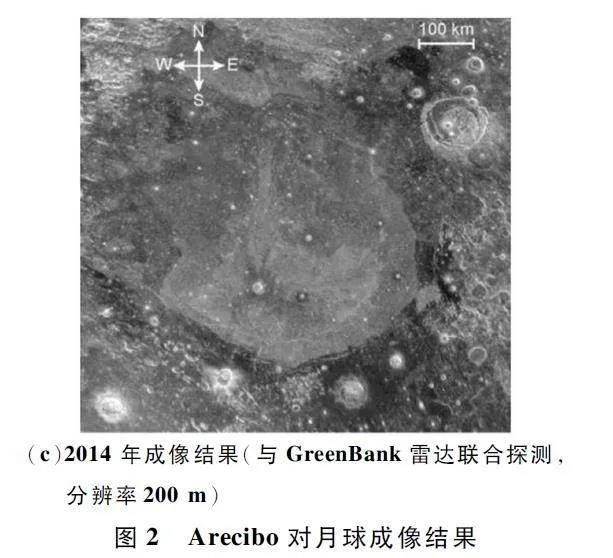
Arecibo 雷達隸屬于美國天文電離層中心,位于加勒比海地區波多黎各(18°20′48″N,66°45′10″W),包括一個輔助天線[12]。Arecibo 自1958 年開始設計,1960 年開始建設,到1963 年投入使用,前后經過幾次大的升級[12],如表2 所示。Arecibo 包括2 個波段:430 MHz、2 380 MHz,波束寬度分別為10 弧分、1. 8 弧分。2020 年,受颶風影響,Arecibo 已無法正常運行。在Arecibo 于1964 年開始對月球進行探測到2020 年退出歷史舞臺的近60 年時間里,使用Arecibo 獲得了大量的圖像[12](如圖2 所示)及科研數據,為研究月球地形地貌、月球水冰探測等問題提供了有力的科學支撐。
Arecibo 既可以作為發射天線,也可以作為接收天線。但Arecibo 無法獲得同向圓極化信號(SC 信號),只能接收反向圓極化信號(OC 信號)[13],Arecibo 早期主要用于單基探測(自發自收)。Thompson 等利用Arecibo 發射430 MHz 脈沖信號,對月球進行探測[12,14],沿著月球邊緣,使用8 個10 弧分波束分別照射不同區域,獲得了月球正面的時延多普勒圖,分辨率20 ~ 36 km。Arecibo 的單發單收模式無法克服視赤道附近南北模糊的問題,使得Arecibo 作為接收天線功能受限,無法滿足成像需求。為解決上述問題,開始發展雙基探測。雙基成像可以進行長時間累積,提高方位向分辨率,也能夠避免能量泄露[15]。鑒于干涉處理在金星成像中取得的成功,1970 年,Thompson[16]設計建造了交叉八木天線作為輔助天線,與距離579 m 外的Arecibo構成雙基干涉系統,利用Arecibo 發射40 MHz 脈沖信號,首次通過雙基干涉的方式獲得了月球正面的雷達圖。受帶寬限制,分辨率為(40 ~ 75 )km ×(100 ~ 150)km。1978 年,Thomas 等使用相同的設備,通過縮短脈沖寬度和多普勒濾波器寬度、對數據進行3 倍過采樣,分辨率提高到了(20 ~ 30)km ×(30 ~ 50)km。1987 年,Thompson[17]利用Arecibo 發射特高頻脈沖信號,由輔助天線(距離11 km)同時接收OC 和SC 信號,通過干涉成像,獲得了月表分辨率2 ~ 5 km 的雷達圖。1993 年,Stacy[18]利用Arecibo 和輔助天線,完成首次S 波段雷達雙基對月探測。
1994 年,Clementine 環繞器雷達在月球表面發現疑似水冰反射信號(Clementine 發射S 波段信號,深空探測網的70 m 天線接收),掀起了水冰探測的高潮。1997 年,Stacy 等[19]利用Arecibo 發射偽碼(偽碼碼)信號,由距離11 km 的輔助天線接收OC和SC 信號,累積時間25 min,獲得月球局部圖,空間分辨率125 m。通過對成像結果分析,認為類似水冰的反射信號有可能是非常粗糙的表面造成的雷達信號異常。2006 年,Campbell 等[20]使用Arecibo發射S 波段信號,綠岸(GreenBank)接收,獲得空間分辨率20 ~ 100 m 的雷達圖。通過分析表明,類似于水冰反射信號的特征在低緯度區域也有發現,因此,前期發現的異常信號無法證明是由水冰造成。2007 年,Campbell 等[21]利用Arecibo 發射的特高頻信號(UHF 波段信號),GreenBank 接收,經過大約16 min 的累積,采用星歷數據進行徙動補償,獲得分辨率400 m×600 m 的雷達圖,通過圓極化率等參數研究了靜海熔巖流[21]。2014 年,其通過相位梯度法聚焦,分辨率達到225 m × 250 m[13]。2010 年,Campbell 等[22]利用Arecibo 發射的S 波段信號,GreenBank 接收,獲得分辨率40 ~ 80 m,分析了月表形貌的形成機理、月表鈦鐵含量的分布。
此外,由于Mini-RF 發射機于2011 年失效,Wahl 等[23]利用Arecibo 和Mini-RF 進行了聯合探測,Arecibo 發射S 波段信號,Mini-RF 接收信號,獲得了開普勒隕石坑等區域的雷達圖,開創了星地聯合對月球進行探測成像的先河。
(2)Goldstone
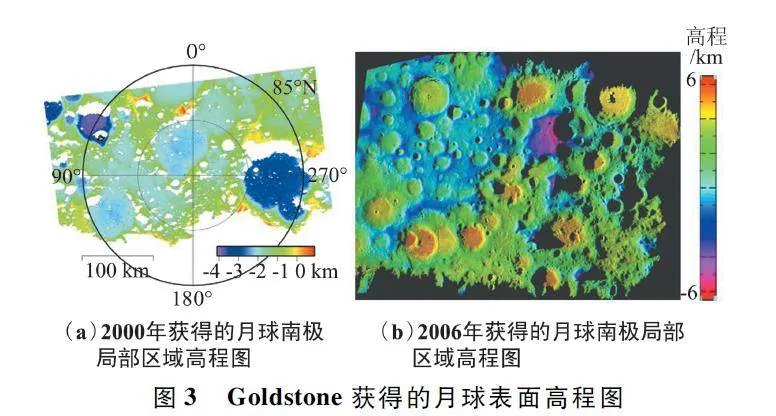
Goldstone 雷達全稱金石太陽系探測雷達(GoldStone Solar Radar,GSSR),隸屬于美國宇航中心,位于美國加利福尼亞州(35°25′36″N,116°53′24″W)包括一個70 m 的發射天線,編號為深空站14(DSS-14),以及3 個30 m 天線DSS13。Goldstone 雷達集測控與雷達于一體,是目前唯一在運行的深空探測雷達。Goldstone 于1958 年開始設計建設[8],1986 年,升級建設70 m 深空網絡天線[24],建立的初衷是完成美國太空探測計劃,可以對月球、金星、水星及小行星等進行探測,為未來著陸選址等鋪路,Goldstone 目前主要用于近地目標觀測[25]。隨著干涉技術的不斷發展,Goldstone 被廣泛應用于對月球地形地貌的成像中,Margot 等在利用Goldstone 對月成像中獲得空間分辨率20 ~ 150 m[7,26-27],高程分辨率5 ~ 50 m(如圖3(a)所示)[7,26-27]。Hensley 等通過長時積累及相位補償算法獲得了月球分辨率20 m×40 m×5 m(如圖3(b)所示)[26],帶寬增到40 MHz 后,分辨率達到4 m×5 m×5 m[28]。
(3)Haystack
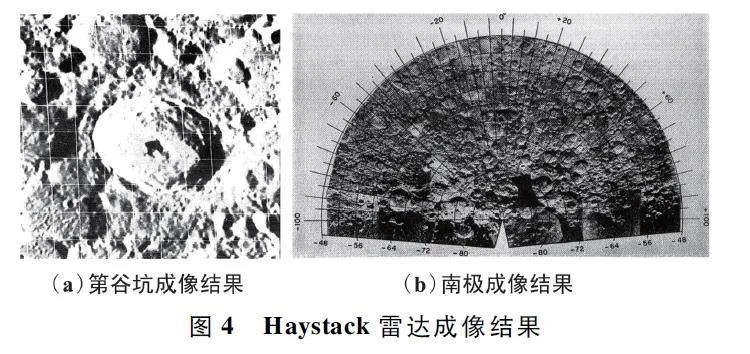
Haystack 雷達位于美國馬薩諸塞州(42°37′N,71°29′W),1960 年由麻省理工學院林肯實驗室設計建設,1964 年,Haystack 整體建成投入使用,后續利用Haystack 雷達對月球進行了成像嘗試。Haystack的波束(3. 1 弧分)只有月球直徑的1 / 8,對月球可以進行高分辨率成像[29]。1967—1968 年,為支撐阿波羅著陸,使用Haystack 雷達觀測了月球的局部區域,分辨率2 km,與同期光學望遠鏡分辨率接近[29],如圖4 所示。Zisk 等首次利用Haystack 雷達進行了干涉測量,空間分辨率2 km,高度分辨率500 m[30-31]。隨著Goldstone 和Arecibo 的投入使用,Haystack 主要用于近地空間目標探測。
(4)Millstone
Millstone 雷達(42°37′N,71°29′W)口徑46 m,最早為監視蘇聯發射的衛星一號(Sputnik I)而設計,主要在UHF 波段進行大氣科學研究。Millstone于1959 年開始建設,屬于薩迦莫爾山天文臺(Saga-more Hill )。1978 年搬遷到了磨石山天文臺(Millstone Hill),地址接近Haystack 雷達。Pettengill[32]使用440 MHz 信號對月球進行了首次時延多普勒成像驗證,開創了利用時延多普勒方法進行月球及行星探測的研究工作。受后續功能定位調整影響,Millstone 雷達應用于月球成像的研究較少,但是其對基于雷達的月球成像具有開創性的重要意義。
(5)GreenBank
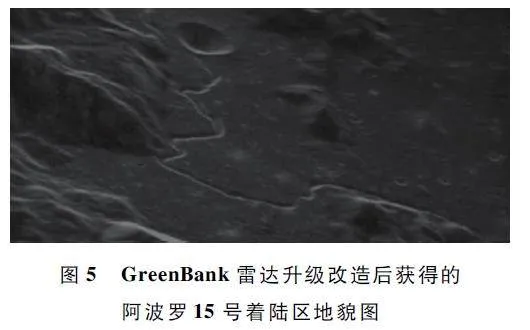
GreenBank 雷達于2000 年建成,孔徑100 m,由2 004 個可活動的反射面板組成。可以接收SC 和OC 兩種圓極化的信號,主要用于信號接收。由于Arecibo 雷達無法探測雙向圓極化信號,且其S 波段無法快速切換發射和接收模式,前人做了大量Arecibo 發射GreenBank 接收模式的月球成像工作[6,13,33]。由于Arecibo 在2020 年后無法正常工作,研究人員開始探索新的探測模式,在GreenBank上安裝了Ku 波段發射機后,使用GreenBank 發射信號,由美國甚長基線陣列接收信號,獲得了月球的時延多普勒圖,分辨率5 m×5 m(如圖5 所示)[34],為目前分辨率最高的月球雷達圖。
(6)其他
歐洲非相干散射雷達(EISCAT)主要被用來探測電離層,2009 年,Vierinen 等[35]利用EISCAT 對月球進行了成像研究,EISCAT 波束寬度0. 5°,通過調整波束指向,選擇第一過零點范圍內成像,解決了寬波束的南北模糊問題,成像分辨率距離向600 m。1964 年,Morrow 等[36]提出多個天線相參疊加的方案,可以顯著提高信噪比。Cuomo 等[37]提出分布式全相參的概念。在后續的驗證實驗中,獲得了預期的較高增益[8]。美國正在利用深空探測網的3 個34m 天線進行組網探測。肯尼迪航天中心的KaBoom使用Ka 波段的3 個12 m 天線正在進行上行測試。每個天線將具備25 kW 峰值功率的發射機,工作范圍34 ~ 36 GHz,合成功率可達225 kW,將極大地提升探測距離及成像分辨率。
1. 2 國內地基雷達及進展
1. 2. 1 國內地基雷達設備
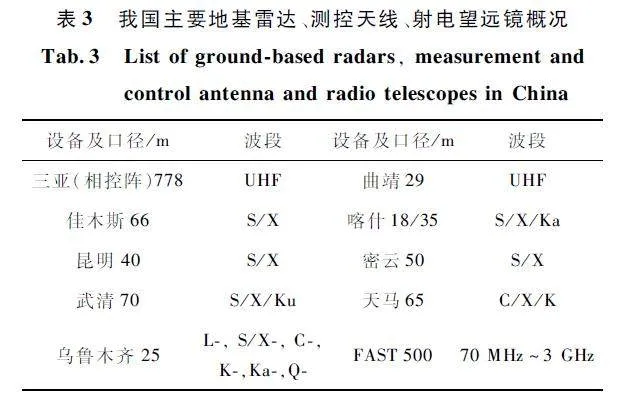
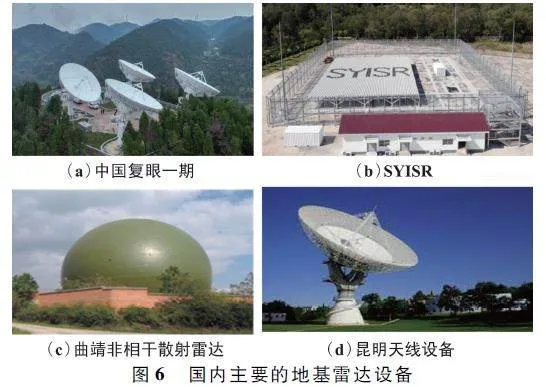
我國星載雷達及機載雷達起步較早,發展比較成熟。在地基雷達領域,我國起步較晚,目前尚無投入使用的專用于深空探測的地基雷達設備。目前,我國具備發射功能的地基雷達主要用于電離層探測、近地目標探測和空間目標追蹤等,口徑及波段信息如表3 所示[38]。我國暫時不具備深空高分辨率探測能力[8]。受國家空間探測規劃影響,國內具有完備的深空測控網,具有天文射電望遠鏡,但是這些設備大多數不具備發射功能,僅能被動接收信號,使用受限。國內現有的具備發射功能的可用于深空探測的地基雷達包括SYISR、中國復眼(一期)、曲靖29 m、佳木斯66 m、喀什18 m 天線等,如圖6 所示。
(1)中國復眼
中國復眼一期位于重慶明月山,包含4 個16 m天線,主要用于設備測試和大規模分布孔徑天線系統的可行性驗證。通過一期4 個天線,獲得了月球局部的地形及高程圖,為后續中國復眼二期的開工建設奠定了基礎。中國復眼二期工程位于重慶云陽,已開工建設,計劃建設25 個30 m 天線,將于2025 年建成,可實現對千萬千米外的小行星探測和成像。
(2)SYISR
SYISR 屬于我國子午線工程項目,位于三亞(18. 3° N,109. 6° E),為相控陣雷達,采用固定陣面、全相掃的探測方式,固態發射機,峰值功率可達2 MW,可發射線性調頻、隨機碼序列等波形。發射右旋圓極化信號,僅能接收左旋圓極化信號。后期,將在文昌及儋州各建設一個觀測站點,組建成海南三站系統。
(3)曲靖非相干散射雷達
曲靖29 m 雷達為我國首套非相干散射雷達,屬于我國子午線工程項目,位于云南省曲靖市沾益區勁松山(25. 6°N,103. 8°E),為拋物面天線,采用機械掃描方式。其具備固態開關,發射峰值功率2 MW,可以發射長脈沖及隨機碼信號。發射左旋圓極化信號,接收右旋圓極化信號。該雷達主要用于電離層探測,但也進行了對月球成像的嘗試。
1. 2. 2 國內研究現狀
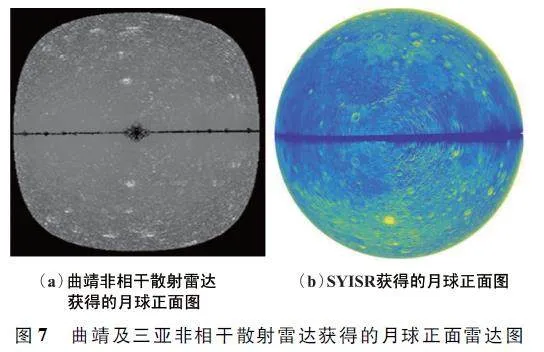
由于國內前期沒有可對月球成像的地基雷達,前期的成像研究主要以算法及仿真研究為主。鄭磊[38]提出長時積累的補償算法,并利用昆明40 m天線的S 波段及天馬65 m 天線的X 波段對應參數進行了仿真驗證,分析了天線口徑、波段對成像結果的影響。劉磊等[39]提出使用等效的單基逆合成孔徑雷達(Inverse Synthetic Aperture Radar,ISAR)成像方法對月球進行成像的算法。丁澤剛等[40]提出布谷鳥算法進行參數化運動補償,解決長時間積累引起的徙動問題。近年來,隨著我國地基雷達設備建設的不斷起步,國內開始采用現有雷達設備對月球進行成像驗證。Sun 等[41]使用喀什35 m 深空站向月球發射C 波段的連續波信號,利用中國測控網及俄羅斯測控網聯合測得OC 和SC 信號,獲得了圓極化率及多普勒頻移等參數,反演了表面粗糙度。孫靖等[42]利用曲靖29 m 自發自收雷達對月球進行成像嘗試(如圖7(a)所示),由于波束較寬,存在明顯的南北模糊問題。Li 等[43]使用SYISR 雷達對月球進行成像,提出了中頻濾波方法,對比分析了線性調頻信號及13 位巴克碼波形的成像結果,13 位巴克碼分辨率大約4. 5 km,線性調頻信號圖像分辨率大約1 km。基于SYISR 探測數據,Li 等[44]采用后向投影方法,對月球局部區域成像,獲得了較高的分辨率。此外,丁澤剛等論證了分布式相參雷達的可行性[8,45]。
2 基礎原理
2. 1 地月系統
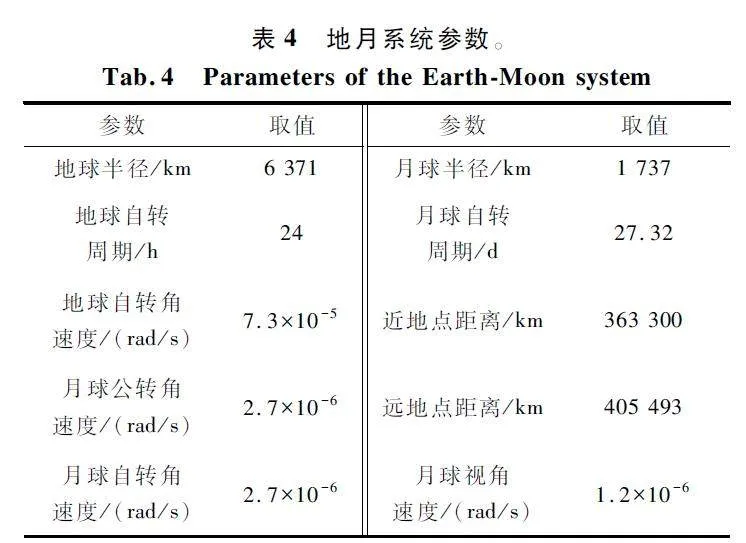
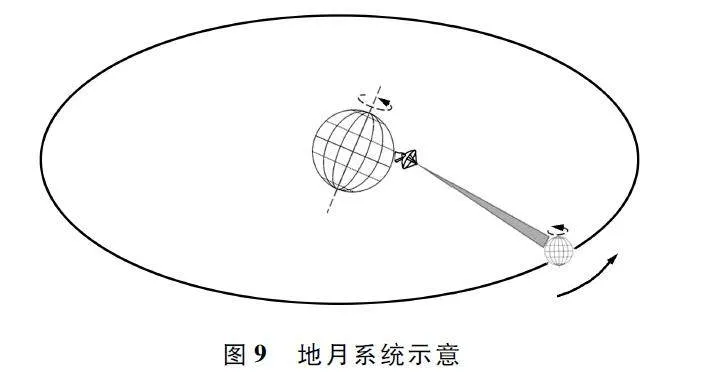
月球環繞地球運動,同時月球自身也在轉動,由于月球的自轉和公轉速度很接近,導致月球只有一面始終朝著地球。地基雷達設備固定在地面,其相對月球的運動是幾個運動的合成,包括地球及月球的自轉和公轉,如圖9 所示。從地球上觀測月球時,月球球面對應的大約為30 弧分[12,21]。月球在不同時刻的位置及地基雷達在月表星下點的位置可通過計算獲得,也可以通過星歷表進行查詢。地月系統的主要參數如表4 所示。
2. 2 時延多普勒方法
2. 2. 1 原理
時延多普勒與合成孔徑雷達(Synthetic ApertureRadar,SAR)成像以及ISAR 原理相似,但時延多普勒方法的數據處理過程比SAR 更簡單。使用時延多普勒方法成像時,通過長時累積,可以使用小口徑天線獲得更高的分辨率。時延多普勒方法最早由Green 提出[46],Pettengill[47] 在MillstoneHill 使用440 MHz 信號進行了驗證,Campbell 等[21] 及Pettengill 等[48]詳細介紹了時延多普勒方法。在累積時間較短時,由于距離及方位向徙動不明顯,往往不用考慮距離徙動的影響[7]。在實際成像的過程中,需要假定月球為一個標準球形,忽略視差的影響,由此帶來的誤差1 ~ 2 km[49]。
時延多普勒成像主要包含3 個步驟:
① 距離及方位向補償。在探測過程中,月球球心與地基雷達空間位置會發生變化,導致其相對距離產生變化,且存在多普勒頻率偏移。因此,需要對原始探測數據進行距離及方位向補償[43]。距離向補償主要消除地月距離向相對運動的影響,將相鄰脈沖的信號包絡對齊。主要包括相關對齊法、最小熵對齊法等方法[39]。其中,相關對齊法利用相鄰回波互相關,通過互相關峰值位置判斷距離向偏移程度。方位向補償可以消除相對運動引起的相位變化,僅保留像素點相對于旋轉中心的轉動相位信息,主要方法包括相位梯度自聚焦法、最小方差法等[21]。相位梯度自聚焦將方位向頻域最大值圓移位至頻譜中間,通過加窗提高信噪比,然后利用相鄰回波內積相位差進行相位補償,經過多次迭代,直至相位誤差達到精度要求。
② 獲得時延多普勒圖。對于發射信號為線性調頻或者偽碼碼信號,首先要對距離維進行脈沖壓縮,然后通過方位向傅里葉變換即可得到時延多普勒圖。
③ 坐標轉換。建立距離多普勒坐標系,將二維時延多普勒圖投影到時延多普勒空間。根據地基雷達及目標的空間位置,對時延多普勒坐標系進行旋轉,將目標投影到月球坐標系。
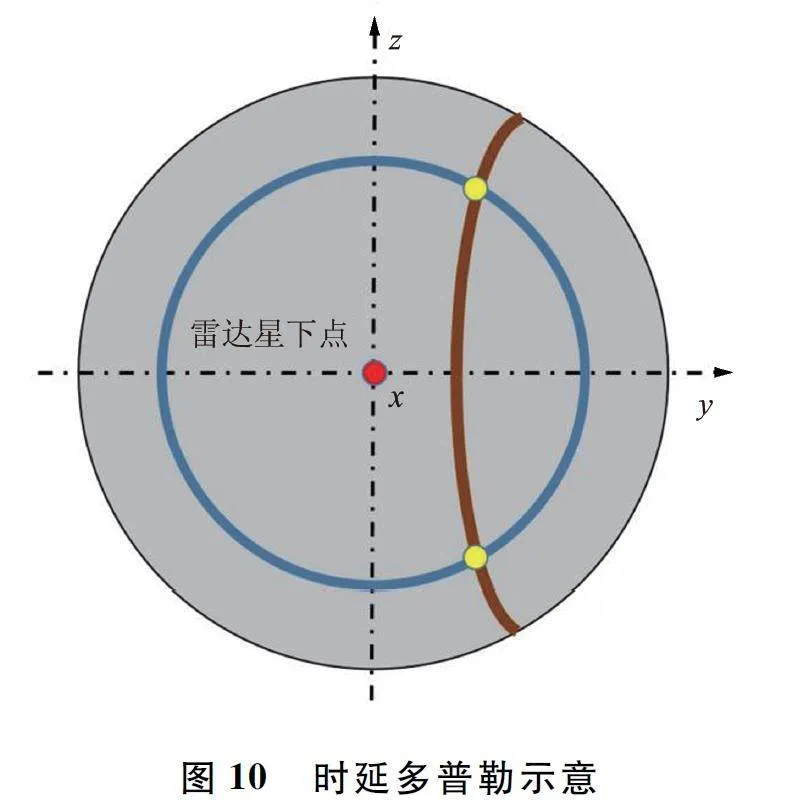
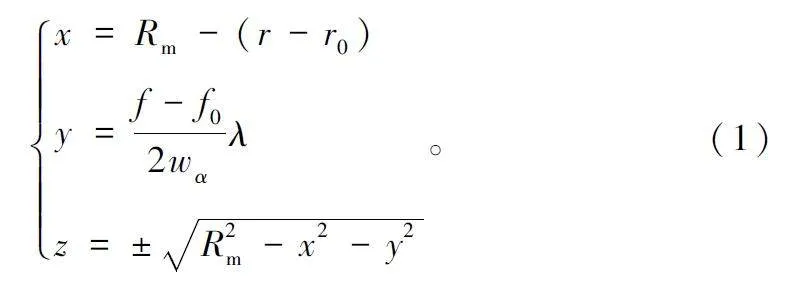
時延多普勒坐標系如圖10 所示,x 軸垂直紙面向外,表示距離深度,y 軸表示多普勒頻率,z 軸表示縱向空間尺寸。雷達星下點為月表距離地基雷達最近的點,垂直于x 軸的圓環上的點與地基雷達之間的距離相同,垂直于y 軸的圓環上的點具有相同的多普勒頻率。假設月球半徑為Rm ,r0 、r 分別表示月球球心及月球表面某點與地基設備的距離,ωα 表示視旋轉角速度,則時延多普勒圖中的點(f,r)在時延多普勒坐標系中的投影(x,y,z)可以表示為:
月球與地球之間存在相對運動,在地面觀測時,月球的旋轉軸與月球實際的南北極軸有偏離,需要基于時延多普勒坐標系進行旋轉處理,主要的影響因素有:① 月球實際南北極軸和時延多普勒南北極軸的夾角γ;② 雷達星下點對應的坐標(λsrp,θsrp )。經過坐標旋轉后,時延多普勒坐標系上的點(x,y,z)投影到月球實際坐標系上的點(x′,y′,z′)可以表示為:
2. 2. 2 存在的問題
(1)南北模糊。在將二維時延多普勒圖投影到三維時延多普勒空間時,二維時延多普勒圖中的特定距離和多普勒頻率對應三維時延多普勒坐標空間的特定的圓環,距離圓環和多普勒頻率圓環交點即為從二維投影到三維的位置。由圖10 可知,2 個圓環在南北半球存在2 個交點,若不采取相應措施,在實際投影過程中將無法區分。南北模糊可以通過以下幾個方法進行消除。① 窄波束探測。為了避免南北目標點反射信號的重疊,單次探測可以采用窄波束只照射月球半球,另一次探測照射月球另一半,2 次探測拼接即可獲得整個月球的雷達反射圖。② 雙基雷達探測。通過位于南北不同區域的2 個地基雷達,利用月球南北兩側目標到達地球不同地基雷達的時延不同消除南北模糊問題。
(2)距離及相位徙動。距離向分辨率與帶寬有關,可以通過發射調頻信號或者隨機碼信號,通過與參考信號匹配濾波實現脈沖壓縮,獲得距離向高分辨率。方位向保存了相位的歷史信息,方位向的分辨率與累積時間有關,累積時間越長,方位向分辨率越高。當累積時間較短時,距離向最大徙動不超過距離向分辨率,此時累積引起的徙動影響可以忽略,無需對原始數據進行距離及相位補償。以往的多數月球成像研究中,累積時間較短,距離及相位徙動不明顯,因此在成像中忽略此影響。如果要在方位向獲得較高分辨率,需要增大累積時間。但是隨著累積時間增大,距離向偏移會超過一個單位的距離分辨率,若不對距離及方位向進行補償,得到的結果會散焦。為消除長時間積累導致的距離偏移,需要進行距離及相位校正處理。
(3)閃爍問題。實際觀測中,雷達信號從地基雷達發射到月球表面及從月球表面反射回地基雷達,都需要經過大氣層,大氣層會引起閃爍效應,得到的雷達圖比較模糊。為了提高信噪比,消除閃爍效應的影響,需要將多次探測結果投影到球體坐標系,并累加[6,13,21]。
2. 3 干涉成像
2. 3. 1 干涉成像概述
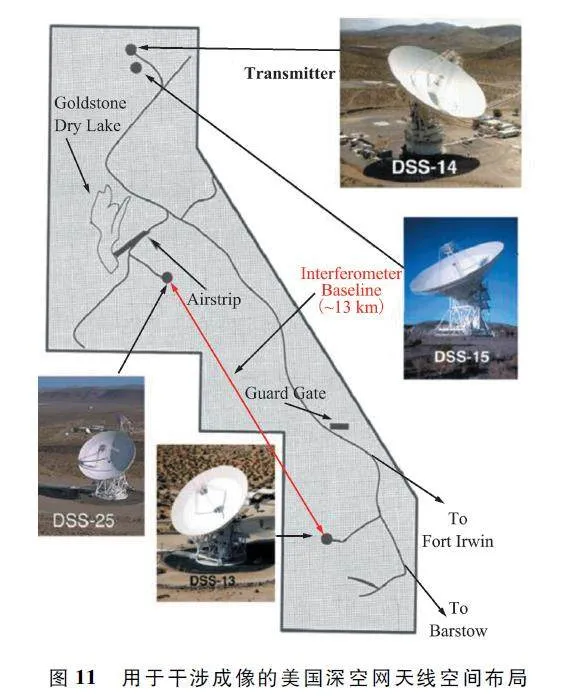
1969 年,美國噴氣實驗室首次將地基雷達的干涉測量方法應用到了金星探測中[16]。1972 年,基于已有的行星表面三維成像方法,Zisk 使用Haystack 和韋斯特福德雷達雷達首次對月表地形地貌進行了探測[30-31],利用干涉方法獲得了局部區域的三維高程圖,空間分辨率1 ~ 2 km,高度分辨率500 m[7]。后期,月球表面三維成像主要由Goldstone 及深空站天線完成,如圖11 所示[26]。
干涉成像的主要步驟包括配準、干涉、去地平、相位濾波、相位解纏繞和計算高程等[7,28-29]。相位濾波和相位解纏繞是其中重要環節,處理效果直接關系到高程的精度。
2. 3. 2 相位濾波
系統噪聲、配準誤差等誤差會降低圖像信噪比,導致解纏繞精度降低。因此,在解纏繞之前需要進行相位濾波處理,消除相位奇點和相位階梯跳躍,同時保留有效的高頻細節。相位濾波的方法包括均值濾波、轉動中位數濾波和功率譜自適應濾波法等,各種方法有各自的局限性,使用時需要根據成像需求選擇合適的相位濾波方法[50]。
2. 3. 3 相位解纏繞
假設2 幅配準后的圖分別為A1 、A2 ,則對應的相位差可以表示為:
式中:φ∈(-π,π]為纏繞相位, 為真實相位,k 為整數。
要通過相位差獲得真實相位信息,就需要利用解纏繞方法,確定k 值,消除相位圖中的2π 跳變。相位解纏繞方法主要包括基于路徑跟蹤的相位解纏算法及基于最小范數的相位解纏算法[51]。基于路徑跟蹤的相位解纏算法利用局部信息,選擇適當的積分路徑,逐個像素進行搜索和積分獲得全局解。該方法效率高,但是對噪聲敏感,適合于信噪比較高的相位圖。基于最小范數的相位解纏算法通過引入目標函數及約束條件,將解纏繞問題轉換成了求最優解問題。該方法比基于路徑跟蹤的相位解纏算法更為穩定,但也會受到噪聲及相位不連續的影響[51]。
2. 3. 4 高程轉化
在干涉成像中,2 個地基雷達不僅記錄了幅度信息,也記錄了相位信息,后者包含了像素點的高程信息。在通過相位解纏繞處理后,可以獲得真實相位信息,則最終的高程信息可以表示為[7]:
式中:h 為高程,λ 為波長,B⊥ 為雷達基線到垂直雷達視線方面平面的投影距離,R 為像素點到雷達的距離。
3 結束語
我國探月工程及火星探測任務的成功實施為后續持續開展月球及深空探測奠定了基礎,月球及深空探測備受關注,地基雷達探測領域將獲得快速發展。以下為對地基雷達成像及我國地基雷達設備后續發展的展望。
(1)分布式相參地基雷達
受制造工藝及雷達工作原理的影響,單基雷達天線的口徑及發射功率受限。要實現遠距離探測,成本較高,使得單基雷達使用場景受到限制。相比單基雷達,分布式雷達具有明顯優勢。① 更強的擴展性:傳統雷達的口徑及發射功率等參數相對固定,可擴展性較差。分布式地基雷達可根據任務需求改變雷達數量,進而可以靈活地改變等效的口徑及發射功率,從而滿足不同探測距離的任務需求。② 更高的信噪比:通過相參處理,分布式雷達可以極大地提高信噪比,發射相參及全相參分別可以獲得N2 及N3 倍信噪比[8]。③ 更遠的探測距離:通過增加分布式雷達的數量,經過相參處理后可獲得更高的等效功率,從而可以實現單基雷達很難達到的探測距離。隨著相參等相關技術的不斷發展,分布式雷達將成為未來主要的遠距離探測雷達方案。
(2)高分辨率成像
在利用距離多普勒方法進行成像時,距離向和方位向分辨率一般相差不大。距離向分辨率可以通過提高帶寬實現,方位向分辨率與累積時間有關。隨著雷達體制的不斷發展,對月成像的距離向分辨率能夠達到米級及以下。要獲得與距離向相當或者更高的方位向分辨率,就需要進行長時間累積,長時間累積會帶來距離及多普勒徙動,需要基于現有算法進行改進,補償距離和多普勒徙動的影響,從而實現高分辨率成像。
(3)我國地基雷達設備的發展
基于我國地基雷達設備現狀,對我國用于月球及深空探測的地基雷達探測設備的后續建設提出以下建議。首先,需要打破大功率發射機、天線上行組陣等關鍵技術壁壘,實現我國地基雷達設備核心部件國產化,縮短國內外差距;其次,加快建設中國復眼等我國專用于月球及深空探測的地基雷達設備,為我國后續開展深空任務做好科學支撐;最后,通過技術改造等途徑,對現有的測控雷達、非相干散射雷達及射電望遠鏡等設備進行升級改造,使其具備組網探測能力。
參考文獻
[1] ZISK S H. Mare Crisium Area TopographyA Comparisonof Earthbased Radar and Apollo Mapping Camera Results[C]∥Mare Crisium:The View from Luna 24. Houston:Pergamon Press,Inc. ,1978:75-80.
[2] MOFENSEN J. Radar Echoes from the Moon[J]. Nature,1946,157:92-98.
[3] BAY Z. Reflection of Microwaves from the Moon [J].Hungarica Acta Physica,1947,1:1-22.
[4] YAPLEE B S,BRUTON R H,CRAIG K J,et al. RadarEchoes from the Moon at a Wavelength of 10 CM [J].Proceedings of the IRE,1958,46(1):293-297.
[5] EVANS J V,HAGFORS T. Radar Astronomy [M]. NewYork:McGrawHill,1968.
[6] CAMPBELL B A. Planetary Geology with Imaging Radar:Insights from Earthbased Lunar Studies[J]. Publicationsof the Astronomical Society of the Pacific,2016,128(964):062001.
[7] MARGOT J L,CAMPBELL D B,JURGENS R F,et al.Digital Elevation Models of the Moon from Earthbased Radar Interferometry [J]. IEEE Transactions on Geoscienceand Remote Sensing,2000,38(2):1122-1133.
[8] 丁澤剛,曾濤,張光偉,等. 分布式地基雷達深空探測技術[J]. 雷達科學與技術,2022,20(1):28-33.
[9] YUE X N,WAN W X,NING B Q,et al. Development ofthe Sanya Incoherent Scatter Radar and PreliminaryResults [J ]. Journal of Geophysical Research:SpacePhysics,2022,127(8):e2022JA030451.
[10] 鄭磊,蘇彥,鄭永春,等. 地基雷達技術及其在太陽系天體探測中的應用[J]. 天文學進展,2009,27 (4):373-382.
[11] 王瑞剛,蘇彥,洪天晟,等. 表層穿透雷達在月球和深空探測中的應用[J]. 天文研究與技術,2020,17(4):492-512.
[12] THOMPSON T W,CAMPBELL B A,BUSSEY D B J. 50Years of Arecibo Lunar Radar Mapping[J]. URSI RadioScience Bulletin,2016,2016(357):23-35.
[13] CAMPBELL B A,HAWKE B R,MORGAN G A,et al.Improved Discrimination of Volcanic Complexes,TectonicFeatures,and Regolith Properties in Mare Serenitatis fromEarthbased Radar Mapping [J]. Journal of GeophysicalResearch:Planets,2014,119(2):313-330.
[14] WILLIAM T T. A Study of Radarscattering Behavior ofLunar Craters at 70 cm[D]. Ithaca:Cornell University,1965.
[15] 李海濤,劉建軍,陳少伍,等. 構建我國近地小行星探測雷達系統的需求與技術途徑探討[J]. 中國科學:信息科學,2021,51(2):325-346.
[16] THOMPSON T W. Map of Lunar Radar Reflectivity at7. 5m Wavelength[J]. Icarus,1970,13(3):363-370.
[17] THOMPSON T W. Highresolution Lunar Radar Map at70cm Wavelength[J]. Earth,Moon,and Planets,1987,37:59-70.
[18] STACY N J S. Highresolution Synthetic Aperture Radar Observations of the Moon[D]. Ithaca:Cornell University,1993.
[19] STACY N J S,CAMPBELL D B,FORD P G. Arecibo Radar Mapping of the Lunar Poles:A Search for Ice Deposits[J]. Science,1997,276(5318):1527-1530.
[20] CAMPBELL D B,CAMPBELL B A,CARTER L M,et al.No Evidence for Thick Deposits of Ice at the Lunar SouthPole[J]. Nature,2006,443(7113):835-837.
[21] CAMPBELL B A,CAMPBELL D B,MARGOT J L,et al.Focused 70cm Wavelength Radar Mapping of the Moon[J]. IEEE Transactions on Geoscience and Remote Sensing,2007,45(12):4032-4042.
[22] CAMPBELL B A,CARTER L M,CAMPBELL D B,et al.Earthbased 12. 6cm Wavelength Radar Mapping of theMoon:New Views of Impact Melt Distribution and MarePhysical Properties[J]. Icarus,2010,208(2):565-573.
[23] WAHL D E,YOCKY D A,BUSSEY B,et al. GeneratingLunar Bistatic SAR Images Using Arecibo and MiniRF[J]. Algorithms for Synthetic Aperture Radar ImageryXI,2012,8394:86-89.
[24] HALDEMANN A F C,LARSEN K W,JURGENS R F,et al.The Goldstone Solar System Radar:1988-2003 EarthbasedMars Radar Observations[R/ OL]. (2005-02-10)[2023 -07-19]. https:∥ntrs. nasa. gov/ citations/ 20050161976.
[25] ALVAREZ N R,JAO J S,LEE C G,et al. The ImprovedCapabilities of the Goldstone Solar System Radar Observatory[J]. IEEE Transactions on Geoscience and RemoteSensing,2021,60:1-15.
[26] HENSLEY S,GURROLA E,ROSEN P,et al. AnImproved Map of the Lunar South Pole with Earth BasedRadar Interferometry [C]∥2008 IEEE Radar Conference.Rome:IEEE,2008:1-6.
[27] MARGOT J L,CAMPBELL D B,JURGENS R F,et al.Topography of the Lunar Poles from Radar Interferometry:A Survey of Cold Trap Locations[J]. Science,1999,284(5420):1658-1660.
[28] HENSLEY S,GURROLA E,HARCKE L,et al. LunarTopographic Mapping Using a New High Resolution Modefor the GSSR Radar[C]∥2010 IEEE Radar Conference.Arlington:IEEE,2010:464-469.
[29] PETTENGILL G H,THOMPSON T W. A Radar Study of theLunar Crater Tycho at 3. 8cm and 70cm Wavelengths[J].Icarus,1968,8(1-3):457-471.
[30] ZISK S H. Lunar Topography:First RadarinterferometerMeasurements of the AlphonsusPtolemaeusArzachel Region[J]. Science,1972,178(4064):977-980.
[31] ZISK S H. A New,Earthbased Radar Technique for theMeasurement of Lunar Topography[J]. The Moon,1972,4:296-306.
[32] PETTENGILL G H. Measurements of Lunar ReflectivityUsing The Millstone Radar[J]. Proceedings of the IRE,1960,48(5):933-934.
[33] CAMPBELL B A,HAWKE B R. Radar Mapping of LunarCryptomaria East of Orientale Basin[J]. Journal of Geophysical Research:Planets,2005,110:E09002.
[34] WILKINSON S R,HANSEN C,ALEXIA B,et al. A Planetary Radar System for Detection and Highresolution Imaging of Nearby Celestial Bodies[J]. Microwave Journal,2022,65(1):22-42.
[35] VIERINEN J,LEHTINEN M S. 32cm Wavelength RadarMapping of the Moon[C]∥ European Radar Conference(EuRAD). Rome:IEEE,2009:222-225.
[36] SKOLNIK M,KING D. Selfphasing Array Antennas[J].IEEE Transactions on Antennas and Propagation,1964,12(2):142-149.
[37] CUOMO K M,COUTTS S D,MCHARG J C,et al. Wideband Aperture Coherence Processing for Next GenerationRadar[R / OL]. (2004-07-30)[2023-07-19]. https:∥www. ll. mit. edu / rd / publications/ widebandaperturecoherenceprocessingnextgenerationradarnexgen.
[38] 鄭磊. 地基雷達對月球成像數據處理方法研究[D]. 北京:中國科學院大學,2011.
[39] 劉磊,周佐邦,孫靖,等. 地球單基ISAR 對月球成像信號參數設計與仿真[J]. 雷達科學與技術,2022,20(1):7-14.
[40] 丁澤剛,張光偉,劉思源,等. 基于參數化運動補償的地基雷達對月成像技術[J]. 信號處理,2021,37(2):167-176.
[41] SUN J,PING J S,BONDARENKO Y,et al. PromotingEarthbased Radar Astronomical Observations of the Moon[J]. Sensors,2020,20(7):1874.
[42] 孫靖,楊嵩,周峰,等. 我國地基雷達觀測月球的現狀和研究進展[J]. 天文研究與技術,2022,19(1):29-40.
[43] LI M Y,YUE X N,WANG Y H,et al. Moon ImagingTechnique and Experiments Based on Sanya IncoherentScatter Radar[J]. IEEE Transactions on Geoscience andRemote Sensing,2022,60:1-14.
[44] LI M,YUE X N,DING F,et al. Focused Lunar ImagingExperiment Using the Back Projection Algorithm Based onSanya Incoherent Scatter Radar [J ]. Remote Sensing,2022,14(9):2048.
[45] 王銳. 分布式全相參雷達參數估計及ISAR 成像方法研究[D]. 北京:北京理工大學,2015.
[46] LEADABRAND R L. Radar Astronomy Symposium Report[J]. Journal of Geophysical,1960,65(4):1103-1118.
[47] PETTENGILL G H. Radar Handbook [M ]. [S. l. ]:WileyIEEE Press,2002.
[48] PETTENGILL G H,ZISK S H,THOMPSON T W. TheMapping of Lunar Radar Scattering Characteristics [J].The Moon,1974,10:3-16.
[49] THOMPSON T W. A Review of Earthbased RadarMapping of the Moon [J]. The Moon and the Planets,1979,20:179-198.
[50] 李穎,曾琪明,鄭婉勤,等. InSAR 干涉圖相位濾波方法綜述[C]∥2006 環境遙感學術年會. 銀川:[出版者不詳],2006:310-317.
[51] 倪娜. 基于路徑跟蹤和雙波長干涉的相位解纏研究[D]. 合肥:安徽大學,2016.
作者簡介
王瑞剛 男,(1992—),博士,工程師。
(*通信作者)夏雙志 男,(1984—),博士,高級工程師。
金松坡 男,(1986—),博士,高級工程師。
蘇 彥 女,(1974—),博士,研究員。主要研究方向:雷達數據處理。
王紫婷 女,(1996—),碩士,助理工程師。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
