基于擴張狀態觀測器的永磁直線同步電機改進模型預測電流控制
2024-09-04 00:00:00趙希梅孫文浩金鴻雁
電機與控制學報 2024年7期

摘 "要:針對永磁直線同步電機(PMLSM)模型預測電流控制(MPCC)中存在的電流脈動過大、在線計算復雜的問題,提出一種基于擴張狀態觀測器(ESO)的改進MPCC策略。利用最優電壓矢量相角和重新劃分后的電壓矢量扇區,改進了第一電壓矢量的選取方式,減小了第二電壓矢量選擇范圍,以實現電壓矢量的快速選取,進而降低電流脈動。同時,為了提高PMLSM抗負載擾動能力,通過ESO對擾動進行觀測,將觀測到擾動轉換為電流進行補償,提高了系統的魯棒性,且補償電流可起到進一步減小電流脈動的作用。仿真結果表明,所提出的控制方法切實可行,與MPCC相比,基于ESO的改進MPCC系統具有更好的控制性能,更小的電流脈動和較強的魯棒性能。
關鍵詞:永磁直線同步電機;改進模型預測電流控制;擴張狀態觀測器;最優電壓矢量相角;電流脈動;魯棒性
DOI:10.15938/j.emc.
中圖分類號:TM351 " " " " " " 文獻標志碼:A " " " " "文章編號:1007-449X(2024)07-0000-00
Improved model predictive current control based on
extended state observer for permanent magnet linear synchronous motor
ZHAO Ximei, SUN Wenhao, JIN Hongyan
(School of Electrical Engineering, Shenyang University of Technology, Shenyang 110870, China)
Abstract: In order to solve the problems of excessive current ripple and complex online calculation in model predictive current control (MPCC) of permanent magnet linear synchronous motor (PMLSM), an improved MPCC strategy based on extended state observer (ESO) was proposed. Using the optimal voltage vector phase angle and the re-divided voltage vector sector, the selection method of the first voltage vector is improved, and the selection range of the second voltage vector is reduced, so as to realize the rapid selection of the voltage vector and reduce the current ripple. At the same time, in order to improve the anti-load disturbance capability of PMLSM, the disturbance is observed through ESO, and the observed disturbance is converted into current for compensation, which improves the robustness of the system, and the compensation current can further reduce the current ripple. The simulation results show that the proposed control method is feasible. Compared with MPCC, the improved MPCC system based on ESO has better control performance, smaller current ripple and stronger robustness.
Keywords: permanent magnet linear synchronous motor; improved model predictive current control; extended state observer; optimal voltage vector phase angle; current ripple; robustness
0 引 "言
隨著近些年先進制造業的高速發展,其對數控機床的速度和精度的要求不斷提升,在激光、航空航天、微電子等高精度工業領域使用永磁直線同步電機(permanent magnet linear synchronous motor,PMLSM)作為核心元件進行直接驅動,可提高系統的控制精度和響應速度[1-2]。然而,由于省略中間傳動環節,PMLSM伺服系統易受參數變化和負載擾動等不確定性影響[3-4]。因此,需要克服不確定性對系統的不利影響,提高系統的控制性能。
電流環為保證電流能精確跟蹤期望電流,抑制各種擾動,需要較好的跟蹤與調節能力[5-6]。目前,電流環常用的控制方法有滑模控制、PI控制和預測控制等控制方法[7-8]。模型預測電流控制(model predictive current control, MPCC)利用控制系統的信息來預測接下來幾個周期時刻的電流增量,再經過價值函數的計算選擇最適合的控制值。然而,該方法存在電流脈動和在線計算量較大的問題[9-10]。單矢量MPCC算法簡單、響應速度快,但在采樣周期中無法改變選擇的電壓矢量,導致電流的跟蹤精度較差[11]。文獻[12]采用三矢量MPCC,通過增加電壓矢量擴大備選電壓矢量的覆蓋范圍,減小了電流脈動,提高了電流的跟蹤精度。但選擇合適的電壓矢量增加了預測耗時。文獻[13]將MPCC轉換為模型預測電壓控制,省去循環尋優環節,降低預測耗時,但在控制器的設計上難度頗高。文獻[14]對三矢量MPCC選擇電壓矢量的方式進行優化,降低了計算的復雜度和預測耗時,提高了穩態性能。然而,當系統存在參數變化和未建模動態等擾動時,控制精度會顯著降低。文獻[15]在滑模控制中引入擴張狀態觀測器(extended state observer, ESO)對擾動估計后補償給控制器,提高了控制器的魯棒性。
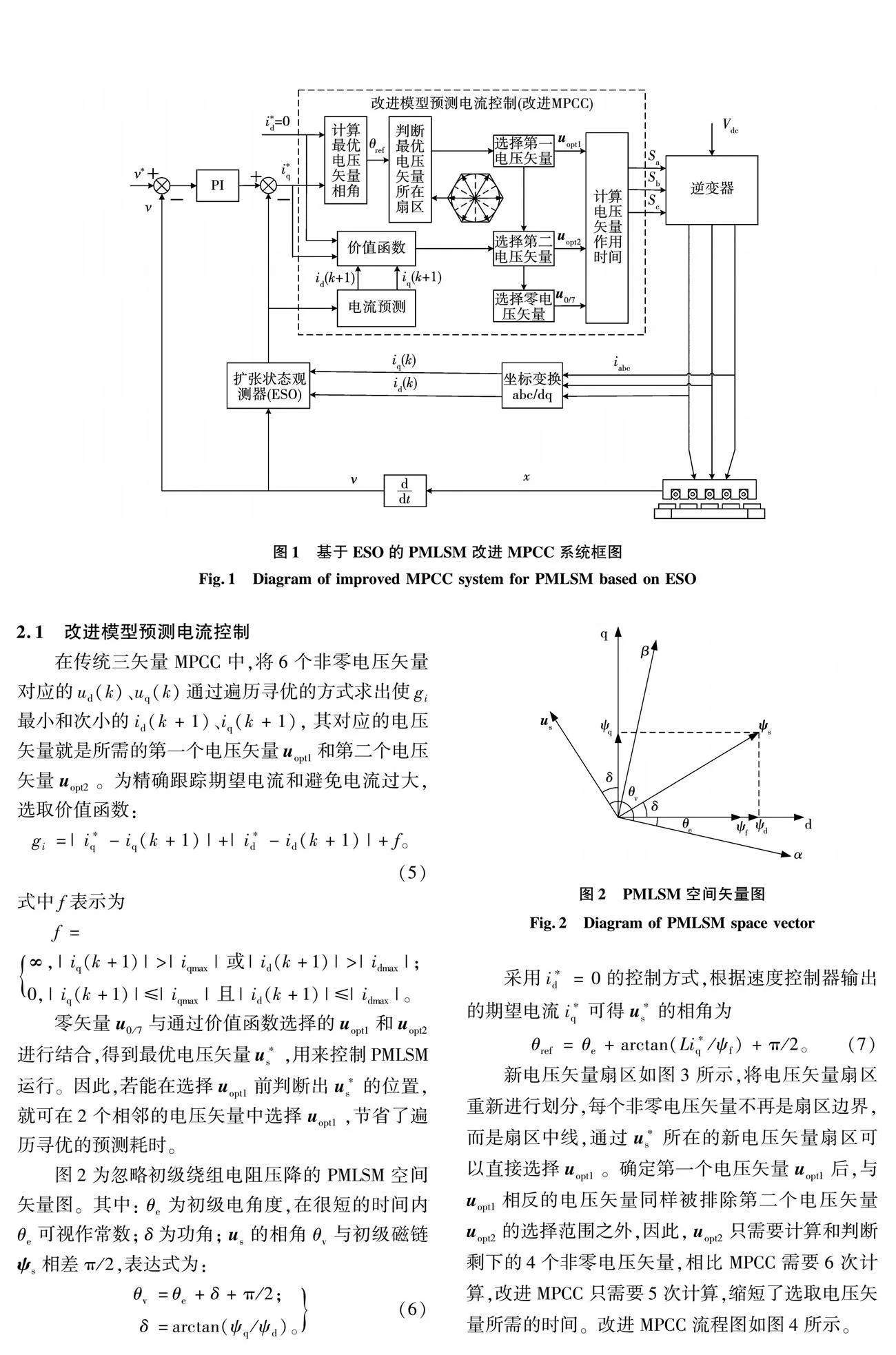
因此,本文設計了一種基于ESO的PMLSM改進MPCC策略。通過確定最優電壓矢量相角和重新劃分電壓矢量扇區,縮小電壓矢量的選擇范圍,減小系統的預測耗時,有效降低了電流脈動。使用ESO對擾動進行觀測,并將其轉換為電流對系統進行補償,以進一步降低電流脈動,提高系統的魯棒性。最后,實驗結果表明所提出控制方法有效地降低了電流脈動和速度的穩態誤差,對負載擾動具有抑制作用。
(31)
為了使ESO穩定且誤差盡可能小,因此在參數整定時,應盡可能使 , 和 盡可能小,且滿足 , 和 需要綜合考慮。選擇合適 , , 的值,使 實現收斂, 實現收斂于 。ESO將觀測的系統內外總擾動轉換為等效電流,對速度控制器輸出的電流進行補償,補償后的q軸電流為
(32)
3 實驗結果及分析
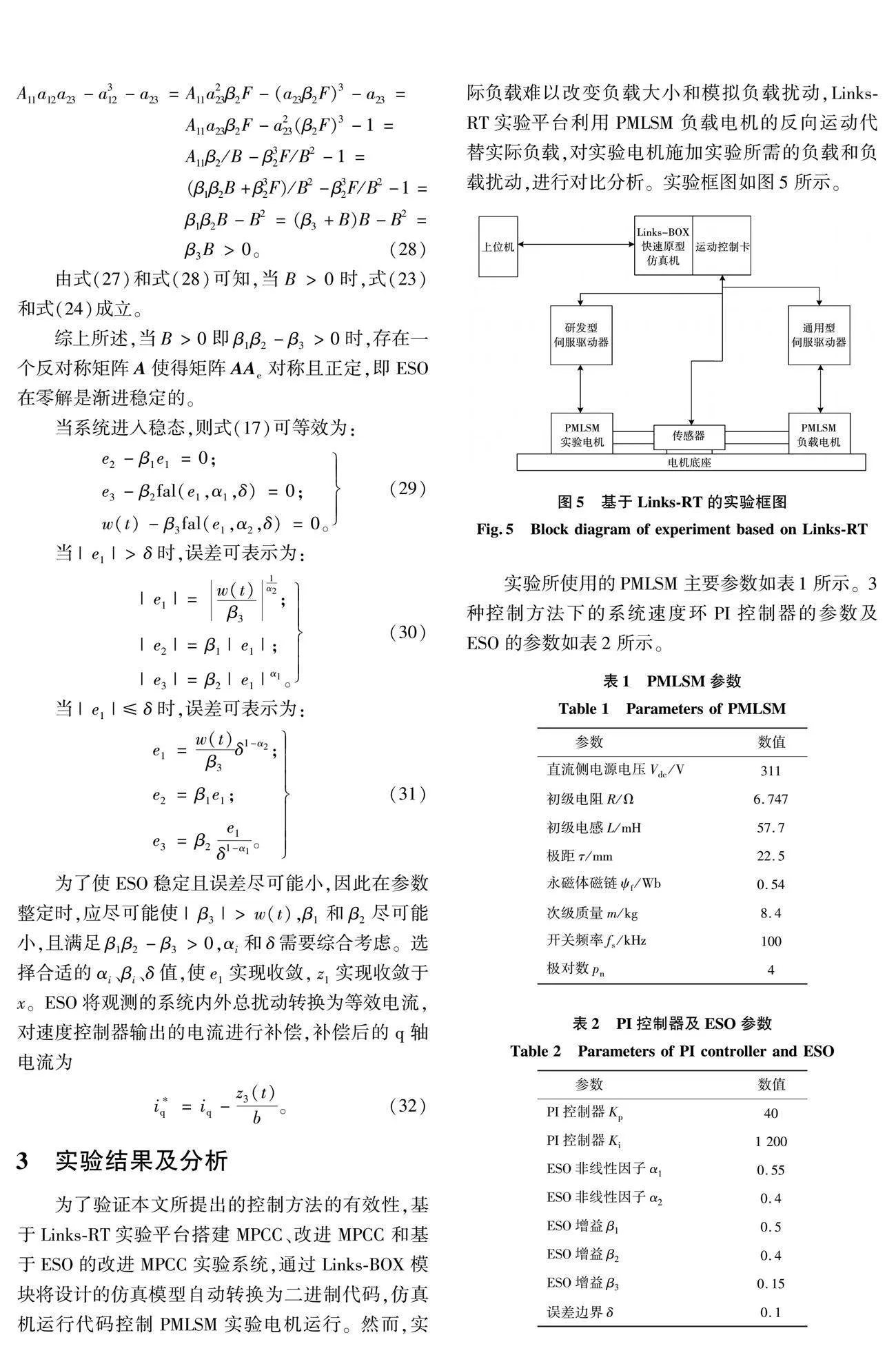
為了驗證本文所提出的控制方法的有效性,基于Links-RT實驗平臺搭建MPCC、改進MPCC和基于ESO的改進MPCC的實驗系統,通過Links-BOX模塊將設計的仿真模型自動轉換為二進制代碼,仿真機運行代碼控制PMLSM實驗電機運行。然而,實際負載難以改變負載大小和模擬負載擾動,Links-RT實驗平臺利用PMLSM負載電機的反向運動代替實際負載,對實驗電機施加實驗所需的負載和負載擾動,進行對比分析。實驗框圖如圖5所示。
實驗所使用的PMLSM的主要參數如表1所示。3種控制方法下的系統速度環PI控制器的參數及ESO的參數如表2所示。
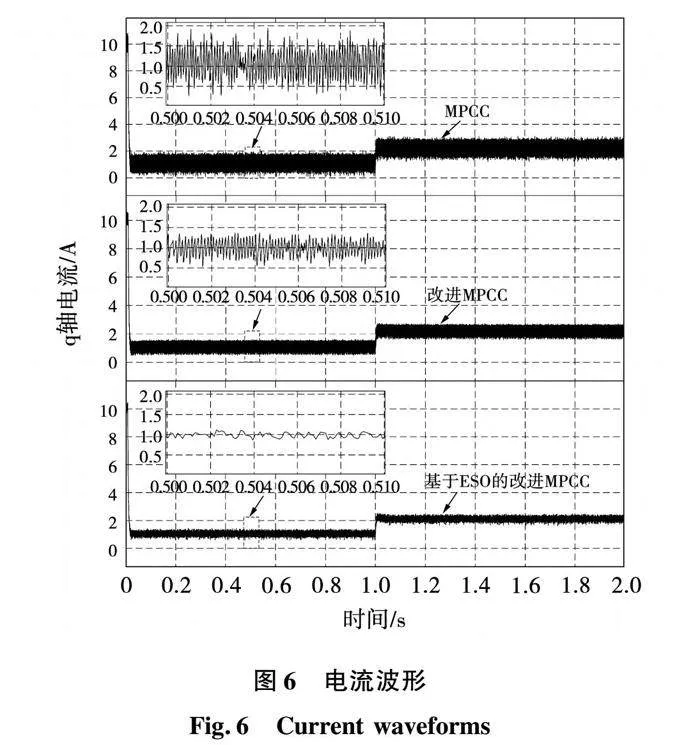
圖6由上到下分別為PMLSM在MPCC、改進MPCC和基于ESO的改進MPCC的q軸電流波形圖。可以看出,在系統穩定后,MPCC情況下的電流脈動最大,波動范圍為0.5~1.6A,在1s時突加 負載,恢復穩定后的波動范圍為1.5~2.7A;改進MPCC次之,突加負載前后的波動范圍為0.7~1.4A和1.6~2.5A,改進MPCC較MPCC相比,q軸電流脈動得到削弱,說明了改進MPCC的有效性;基于ESO的改進MPCC的電流脈動最小,突加負載前后的波動范圍為0.9~1.1A和1.9~2.1A,說明ESO將觀測到的擾動轉換為電流進行補償也起到了抑制了電流脈動的作用,進一步減小了改進MPCC的電流脈動,證明了本文所提出的基于ESO的改進MPCC在抑制電流脈動上具有較好的可行性。
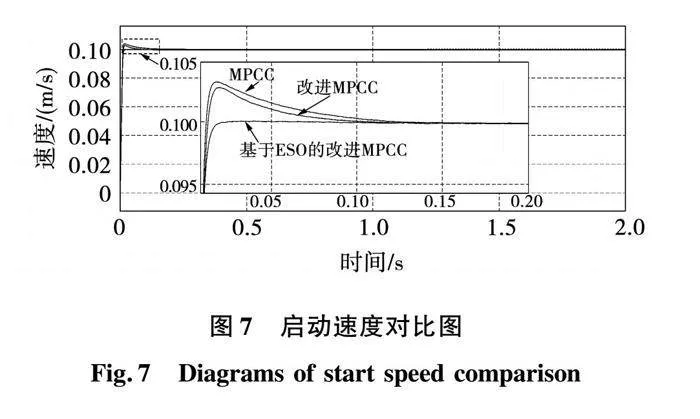
圖7為電機給定速度0.1 、帶 負載起動時3種控制方法的速度對比圖。可以看出,MPCC瞬態響應時間為0.13s,改進MPCC瞬態響應時間減小到0.1s,產生的超調量更小,說明改進MPCC能夠減少預測耗時。基于ESO的改進MPCC瞬態響應時間為0.02s,同時實現了無超調啟動,證明了本文所提出的基于ESO的改進MPCC在提高動態性能上具有較好的可行性。
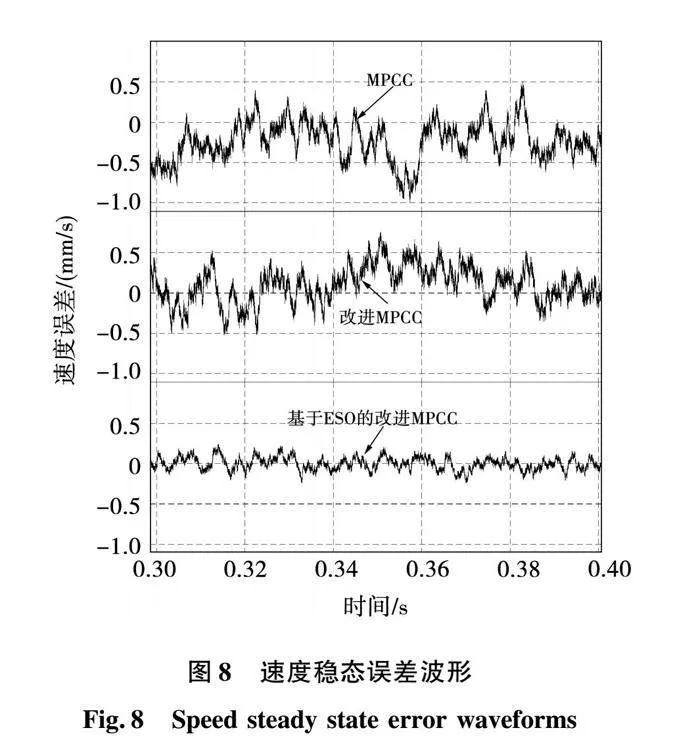
待電機穩定運行之后,3種控制方法在0.3~0.4s的速度穩態誤差如圖8所示,MPCC下的電機速度穩態誤差范圍為-1~0.5 ,改進MPCC下的電機速度穩態誤差范圍為-0.5~0.7 ,基于ESO的改進MPCC下的電機速度穩態誤差范圍為-0.2~0.2 ,證明了本文所提出的基于ESO的改進MPCC在減小穩態誤差具有較好的可行性。
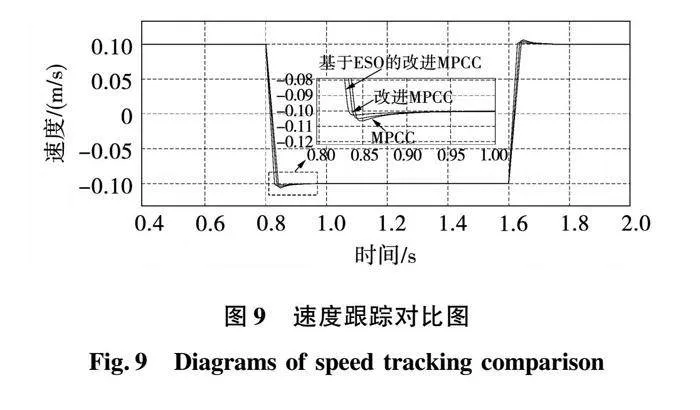
電機帶 負載起動時,輸入幅值0.1 、頻率為0.625Hz的方波信號,3種控制方法的速度跟蹤如圖9所示,在給定速度改變后,基于ESO的改進MPCC可以實現速度的快速跟蹤。
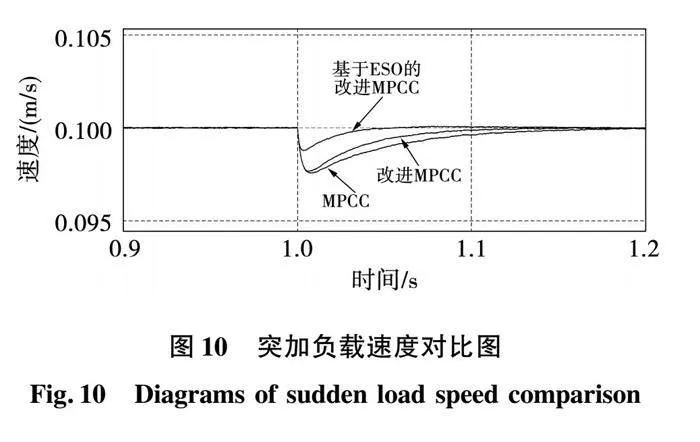
在1s時突加 負載,,3種控制方法下的速度變化如圖10所示。可以看出,PMLSM無論是在MPCC下的速度還是在改進MPCC下的速度都產生了較大波動,但是在改進MPCC下的速度恢復到給定值的時間更短,說明提高預測速度無法進一步改進抗負載擾動能力。在系統中引入ESO后,將突加負載看作一個擴張狀態量進行在線估計并實時補償,使得改進MPCC產生的最大跟蹤誤差減小。同時,速度可以在1.05s恢復到0.1 ,提高了系統的魯棒性。
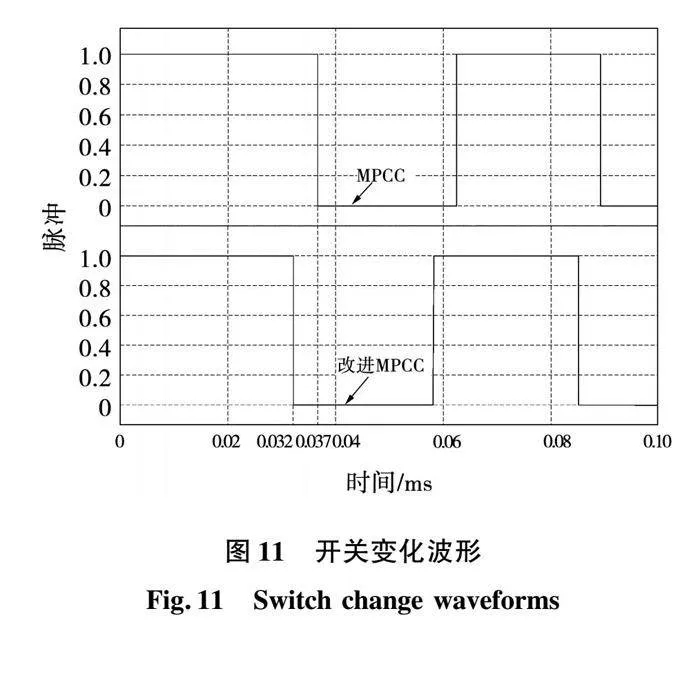
圖11為PMLSM在起動后的0.1ms內開關的變化波形。可以看出,MPCC下的開關在0.037ms時改變開關狀態,改進MPCC下的開關在0.032ms時改變開關狀態,說明改進MPCC在起動后發生開關狀態改變所需的時間更短,其可以更快得出開關狀態的變化情況,即改進MPCC的計算量更少。
4 結 "論
為了提高PMLSM直接驅動的控制性能,設計了一種基于ESO的改進MPCC方法,通過最優電壓矢量相角和重新劃分后的電壓矢量扇區改進模型預測電流控制器,同時,采用ESO對擾動進行估計,并產生電流對系統進行補償。實驗結果表明:
1)與MPCC相比,改進MPCC可以實現電壓矢量的快速選取,減小計算復雜度和電流脈動。
2)ESO對電流進行補償進一步減小了電流脈動,同時提高了系統的動態性能和穩態性能。
3)在負載與速度突變時,基于ESO的改進MPCC具有較強的魯棒性。
參 考 文 獻:
[1] LIN C H. Linear permanent magnet synchronous motor drive system using AAENNB control system with error compensation controller and CPSO[J]. Electrical Engineering, 2020, 102(5): 1311.
[2] 汪鳳翔, 何龍. 永磁直線電機快速終端滑模預測電流控制[J].電機與控制學報, 2023, 27(6):160.
WANG Fengxiang, HE Long. Fast terminal sliding mode predictive current control for permanent magnet linear motor [J]. Electric Machines and Control, 2023, 27(6): 160.
[3] 周華偉, 于曉東, 劉國海, 等. 基于內模的圓筒永磁直線電機滑模速度控制[J]. 中國電機工程學報, 2019, 39(11): 3382.
ZHOU Huawei, YU Xiaodong, LIU Guohai, et al. Sliding mode speed control for tubular permanent magnet linear motors based on internal model[J]. Proceedings of the CSEE, 2019, 39(11):3382.
[4] 唐友亮, 張錦, 李守軍. 數控機床進給系統三電平直線電機模型預測轉矩控制[J]. 大電機技術, 2022, 3: 42.
TANG Youliang, ZHANG Jin, LI Shoujun. Model predictive torque control of three-level linear motor based on feed system of CNC machine tool [J]. Large Electric Machine and Hydraulic Turbine, 2022, 3: 42.
[5] 劉川, 朱非甲, 馬偉, 等. 直線電機的線性自抗擾控制[J]. 電機與控制學報, 2013, 17(1): 71.
LIU Chuan, ZHU Feijia, MA Wei, et al. Linear auto disturbance rejection control of linear motor [J]. Electric Machines and Control, 2013, 17(1): 71.
[6] 呂剛. 直線電機在軌道交通中的應用與關鍵技術綜述[J]. 中國電機工程學報, 2020, 40(17): 5665.
LV Gang. Review of the application and key technology in the linear motor for the rail transit[J]. Proceedings of the CSEE, 2020, 40(17): 5665.
[7] YIN Zhonggang, GONG Lei, DU Chao, et al. Integrated position and speed loops under sliding-mode control optimized by differential evolution algorithm for PMSM drives[J]. IEEE Transactions on Power Electronics, 2019, 34(9): 8994.
[8] XU Yanping, DING Xianhua, WANG Jibing, et al. Robust three-vector-based low-complexity model predictive current control with super-twisting algorithm-based second order sliding mode observer for permanent magnet synchronous motor[J]. IET Power Electronics, 2019, 12(11): 2895.
[9] SUN Xiaodong, WU Minkai, LEI Gang, et al. An improved model predictive current control for PMSM drives based on current track circle[J]. IEEE Transactions on Industrial Electronics, 2021, 68(5): 3782.
[10] JIANG X, YANG Y, FAN M, et al. An improved implicit model predictive current control with continuous control set for PMSM drives [J]. IEEE Transactions on Transportation Electrification, 2022(2): 2444.
[11] 李盛培, 羅亮, 劉知貴. 永磁同步直線電機伺服控制系統研究與設計[J]. 機械設計與制造, 2015(8): 143.
LI Shengpei, LUO Liang, LIU Zhigui. Research and design of permanent magnet synchronous linear motor servo control system[J]. Mechanical Design and Manufacturing, 2015(8): 143.
[12] 徐艷平, 王極兵, 張保程, 等. 永磁同步電機三矢量模型預測電流控制[J]. 電工技術學報, 2018, 33(5): 980.
XU Yanping, WANG Jibing, ZHANG Baocheng, et al. Three vector model predictive current control of permanent magnet synchronous motor[J].Transactions of China Electrotechnical Society, 2018, 33(5): 980.
[13] 王萌, 施艷艷, 沈明輝, 等. 三相電壓型整流器模型電壓預測控制[J]. 電工技術學報, 2015, 30(16):49.
WANG Meng, SHI Yanyan, SHEN Minghui, et al. Model voltage predictive control of three-phase voltage source rectifier[J]. Transactions of China Electrotechnical Society, 2015, 30(16): 49.
[14] 周立, 尚治博, 謝磊, 等. 永磁同步電機三矢量優化預測電流控制[J]. 電力電子技術, 2022, 56(6): 49.
ZHOU Li, SHANG Zhibo, XIE Lei, et al. Three vector optimal predictive current control of permanent magnet synchronous motor[J]. Power Electronics Technology, 2022, 56(6): 49.
[15] JIANG Junfeng, ZHOU Xiaojun, ZHAO Wei, et al.A fast integral sliding mode controller with an extended state observer for position control of permanent magnet synchronous motor servo systems[J]. Frontiers of Information Technologyamp;Electronic Engineering, 2020, 21(8): 1239.
(編輯:邱赫男)
