改進(jìn)無(wú)模型自適應(yīng)迭代學(xué)習(xí)的直線電機(jī)滑模控制
2024-09-04 00:00:00鄭鑫鑫張大海曹榮敏侯忠生
電機(jī)與控制學(xué)報(bào) 2024年7期


摘 "要:二維直線電機(jī)具有非線性、多變量及強(qiáng)耦合等特點(diǎn),其精確模型無(wú)法獲得,同時(shí),在實(shí)際過(guò)程中由于參數(shù)攝動(dòng)及擾動(dòng)而造成的運(yùn)行不穩(wěn)定現(xiàn)象,致使對(duì)其跟蹤控制十分困難。針對(duì)以上問(wèn)題,根據(jù)無(wú)模型自適應(yīng)迭代學(xué)習(xí)控制不依賴于被控系統(tǒng)精確數(shù)學(xué)模型的特點(diǎn)及滑模控制具有可設(shè)計(jì)且與對(duì)象參數(shù)和擾動(dòng)無(wú)關(guān)的滑動(dòng)模態(tài),提出一種改進(jìn)無(wú)模型自適應(yīng)迭代學(xué)習(xí)的滑模結(jié)構(gòu)復(fù)合控制策略。在無(wú)模型自適應(yīng)迭代學(xué)習(xí)控制方案的準(zhǔn)則函數(shù)中加入誤差變化率,并對(duì)其收斂性進(jìn)行分析論證;然后在緊格式動(dòng)態(tài)線性化基礎(chǔ)上,設(shè)計(jì)指數(shù)趨近律滑模控制,使改進(jìn)無(wú)模型自適應(yīng)迭代學(xué)習(xí)的滑模控制復(fù)合策略能夠克服不穩(wěn)定現(xiàn)象并具有很強(qiáng)的魯棒性,從而進(jìn)一步提高系統(tǒng)響應(yīng)速度和控制精度。最后,通過(guò)仿真和實(shí)物驗(yàn)證,控制精度穩(wěn)定在1μm范圍內(nèi),并與其他控制方案相比,驗(yàn)證了所提方法的準(zhǔn)確性和有效性。
關(guān)鍵詞:改進(jìn)無(wú)模型自適應(yīng)迭代學(xué)習(xí)控制;誤差變化率;準(zhǔn)則函數(shù);滑模控制;二維直線電機(jī)
DOI:10.15938/j.emc.(編輯填寫(xiě))
中圖分類(lèi)號(hào):TM359 " " " " " " 文獻(xiàn)標(biāo)志碼:A " " " " "文章編號(hào):1007 -449X(2017)00-0000-00(編輯填寫(xiě))
Improved model free adaptive iterative learning control for
linear motor sliding mode control
ZHENG Xinxin, ZHANG Dahai, CAO Rongmin, HOU Zhongsheng
(1.School of Electrical and Engineering, Beijing Jiaotong University, Beijing 100044, China;
2.School of Automation, Beijing Information Science and Technology University, Beijing 100192, China
3.School of Automation, Qingdao University, Qingdao 266071,China)
Abstract: The two-dimensional linear motor is characterized by nonlinearity, uncertainty, multivariable and strong coupling, and its exact model is not available, meanwhile, the operational instability caused by parameter uptake and perturbation in the actual process makes its tracking control very difficult. To address the above problems, based on the characteristics of model free adaptive iterative learning control that does not depend on the accurate mathematical model of the controlled system and the sliding mode control that can be designed independently of the object parameters and perturbations, a composite control strategy is proposed to improve the model free adaptive iterative learning sliding mode structure. Then, the exponential convergence law sliding mode control is designed on the basis of the tight-form dynamic linearization, so that the improved model free adaptive iterative learning sliding mode control composite strategy can overcome the instability phenomenon and has strong robustness, thus further improving the system response speed and control accuracy. Finally, the control accuracy is stabilized within 1 μm by simulation and physical verification, and the accuracy and effectiveness of the proposed method is verified compared with other control schemes.
Keywords: improved model free adaptive iterative learning control; sliding mode control; two-dimensional linear motor; error rate of change; criterion function
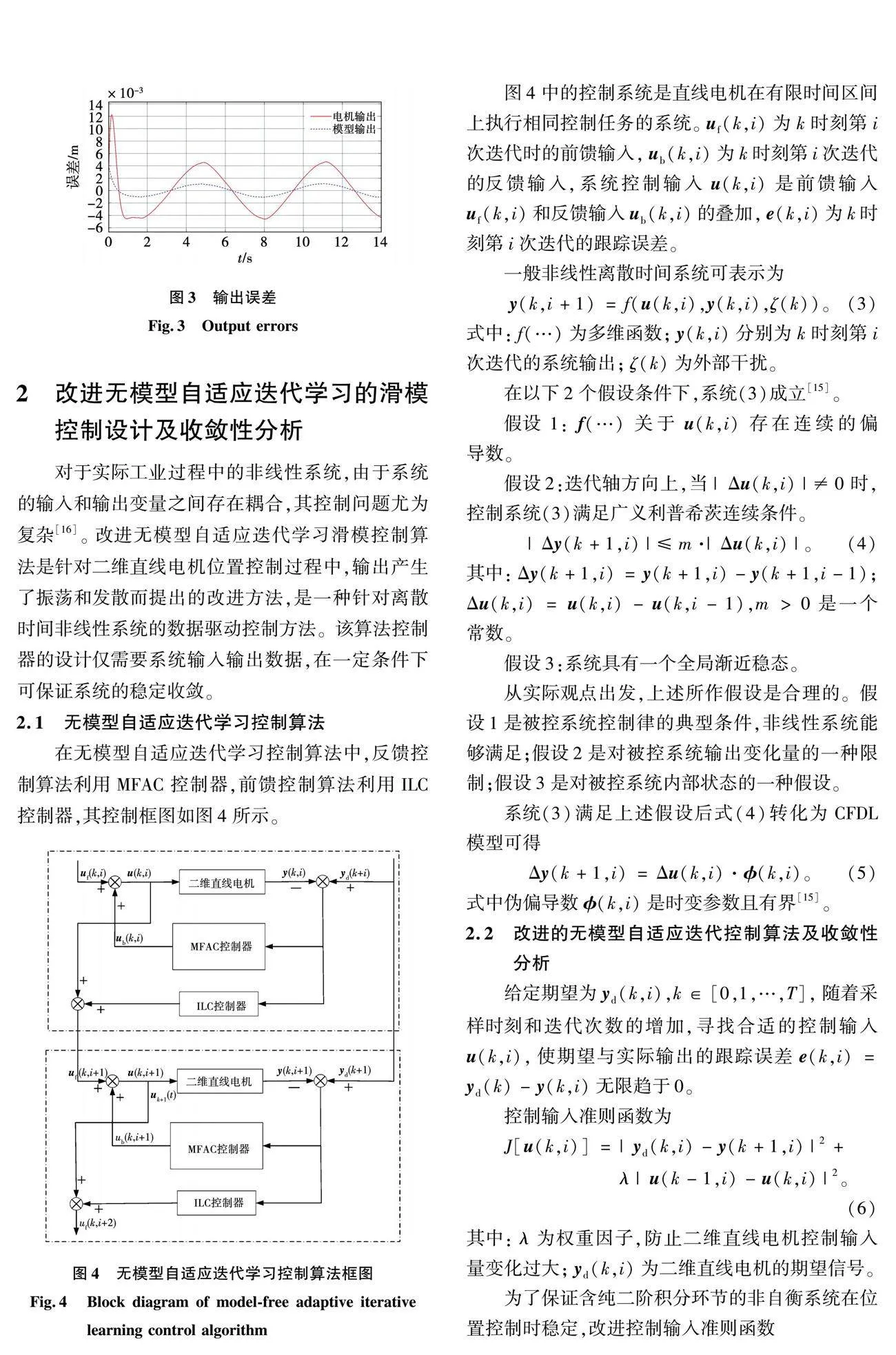
0 引 "言
二維直線電機(jī)是一個(gè)具有強(qiáng)耦合、不確定性、多變量等特點(diǎn)的復(fù)雜控制對(duì)象[1]。隨著智能制造,高端設(shè)備,自動(dòng)控制技術(shù)的發(fā)展,二維直線電機(jī)的用途更加廣泛。同時(shí),也對(duì)二維直線電機(jī)的控制精度提出了更高的要求。其中基于二維直線電機(jī)的高速高精度運(yùn)動(dòng)平臺(tái)是精密加工的核心部件,在精密加工技術(shù)領(lǐng)域,平臺(tái)結(jié)構(gòu)的運(yùn)行精度和定位精度直接決定了工件的生產(chǎn)加工和量測(cè)精度。由于二維直線電機(jī)控制性能受系統(tǒng)不確定性的影響,例如參數(shù)變化、非線性摩擦、未知外部干擾、機(jī)械耦合、抖振等.因此提高直線電機(jī)的魯棒性已成為當(dāng)下研究和解決的問(wèn)題之一[2]。
為達(dá)到期望的控制性能,解決傳統(tǒng)控制器存在的問(wèn)題,近年來(lái)提出了多種魯棒控制器,如魯棒補(bǔ)償控制[3]、學(xué)習(xí)控制[4]、滑模控制[5-7]、神經(jīng)網(wǎng)絡(luò)控制[8]等。其中滑模控制因其對(duì)模型精度要求低、對(duì)外界干擾魯棒性強(qiáng)而成為研究熱點(diǎn)。滑模控制(sliding mode control, SMC)已成功應(yīng)用于電機(jī)控制系統(tǒng)[6-7,9]。在文獻(xiàn)[10]中,在電機(jī)閉環(huán)控制系統(tǒng)中應(yīng)用滑模控制混合方法,結(jié)果表明所設(shè)計(jì)控制器的有效性是非常確定的。文獻(xiàn)[8,11]為提高雙直線電機(jī)系統(tǒng)跟蹤精度,提出了將滑模控制和神經(jīng)網(wǎng)絡(luò)結(jié)合的方案,雖然保證了系統(tǒng)位置的跟蹤性和魯棒性,但是控制結(jié)構(gòu)依然相對(duì)復(fù)雜。文獻(xiàn)[12]為提高系統(tǒng)魯棒性,提出了將自適應(yīng)控制和模糊控制及擾動(dòng)觀測(cè)器相結(jié)合的控制策略來(lái)對(duì)永磁同步電機(jī)進(jìn)行控制,結(jié)果表明,所設(shè)計(jì)的方案雖然具有較好的跟蹤性能,改善了控制精度,但模糊規(guī)則的設(shè)計(jì)仍需要利用一定的先驗(yàn)知識(shí)。 文獻(xiàn)[13]為減小雙直線電機(jī)系統(tǒng)跟蹤誤差,提出了非奇異快速終端滑模控制,但所設(shè)計(jì)控制器對(duì)系統(tǒng)模型信息具有高度依賴性,不易實(shí)現(xiàn)。而相對(duì)于傳統(tǒng)的無(wú)模型控制策略,雖無(wú)需建立直線電機(jī)動(dòng)態(tài)模型,但控制效果往往難以達(dá)到要求,而基于模型的控制策略,所建模型精度對(duì)系統(tǒng)控制精度影響較大,控制律也較為復(fù)雜。針對(duì)以上問(wèn)題,有學(xué)者提出了先進(jìn)的無(wú)模型自適應(yīng)控制(model free adaptive control, MFAC) [14-15]。文獻(xiàn)[15]提出了魯棒無(wú)模型自適應(yīng)學(xué)習(xí)控制方案,建立一種基于偽偏導(dǎo)數(shù)(pseudo partial derivative,PPD)概念的無(wú)模型離散非線性系統(tǒng)建模方法。該方法中PPD的獲取僅需要系統(tǒng)的輸入輸出數(shù)據(jù),其控制器的設(shè)計(jì)也是僅依賴于系統(tǒng)的輸入輸出數(shù)據(jù),該方法的提出在解決非線性系統(tǒng)建模困難的問(wèn)題上提供了另一種思路。文獻(xiàn)[16]針對(duì)非線性離散系統(tǒng),提出了一種新的自適應(yīng)準(zhǔn)滑模控制策略,這種設(shè)計(jì)雖然是基于無(wú)模型設(shè)計(jì)的,但其沒(méi)考慮系統(tǒng)不確定性帶來(lái)的影響。在此基礎(chǔ)上,文獻(xiàn)[17]通過(guò)神經(jīng)網(wǎng)絡(luò)方法,解決系統(tǒng)不確定性帶來(lái)的影響,提出了基于緊格式動(dòng)態(tài)線性化方法(compact form dynamic linearization,CFDL)的神經(jīng)網(wǎng)絡(luò)滑模控制律使控制系統(tǒng)具有良好的穩(wěn)定性和收斂性。因此,為減輕上述缺點(diǎn),設(shè)計(jì)不依賴于精確數(shù)學(xué)模型且系統(tǒng)能穩(wěn)定運(yùn)行的控制方案,可以有效解決二維直線電機(jī)在實(shí)際運(yùn)行過(guò)程中的問(wèn)題。
針對(duì)以上問(wèn)題,為進(jìn)一步提高二維直線電機(jī)系統(tǒng)跟蹤精度和控制性能,提出了將改進(jìn)無(wú)模型自適應(yīng)迭代學(xué)習(xí)控制(model free adaptive iterative learning control, MFAILC)與指數(shù)趨近律的滑模控制相結(jié)合的控制策略。一方面該控制策略無(wú)需二維直線電機(jī)系統(tǒng)精確數(shù)學(xué)模型,僅利用被控系統(tǒng)的輸入輸出數(shù)據(jù),便可實(shí)現(xiàn)對(duì)嚴(yán)格重復(fù)運(yùn)作的系統(tǒng)在有限區(qū)間上的完全跟蹤和穩(wěn)定精密控制;另一方面利用滑模動(dòng)態(tài)的優(yōu)勢(shì),進(jìn)一步提高系統(tǒng)收斂速度和跟蹤性能,較單獨(dú)作用的無(wú)模型自適應(yīng)迭代學(xué)習(xí)控制或滑模控制,該控制方案對(duì)外界干擾具有較強(qiáng)的抵抗能力,且具有在線學(xué)習(xí)功能,調(diào)節(jié)參數(shù)少,降低了控制難度,增強(qiáng)了系統(tǒng)魯棒性,加快了學(xué)習(xí)收斂速度,并保證了系統(tǒng)穩(wěn)定收斂。最后通過(guò)仿真和實(shí)驗(yàn)對(duì)改進(jìn)MFAILC-SMC復(fù)合策略進(jìn)行有效驗(yàn)證。
1.1 二維直線電機(jī)簡(jiǎn)化模型辨識(shí)
在建立二維直線電機(jī)數(shù)學(xué)模型之前,做以下假設(shè)。①忽略直線電機(jī)的端部效應(yīng)及鐵心飽和效果;②磁場(chǎng)均勻分布;③三項(xiàng)繞組分布均勻?qū)ΨQ;④忽略渦流和磁滯損耗[10,13]。
基于二維直線電機(jī)運(yùn)動(dòng)控制系統(tǒng)實(shí)物平臺(tái),在建立其數(shù)學(xué)模型時(shí)需要考慮諸多外部干擾和不確定性[2],其中主要是耦合作用力、電磁推力、非線性摩擦力等[9-10]。依據(jù)二維直線電機(jī)動(dòng)力學(xué)特性,通過(guò)建模和簡(jiǎn)化[1],二維直線電機(jī)平臺(tái)數(shù)學(xué)模型可簡(jiǎn)化表示為:
仿真分析與實(shí)驗(yàn)驗(yàn)證
2.1 仿真
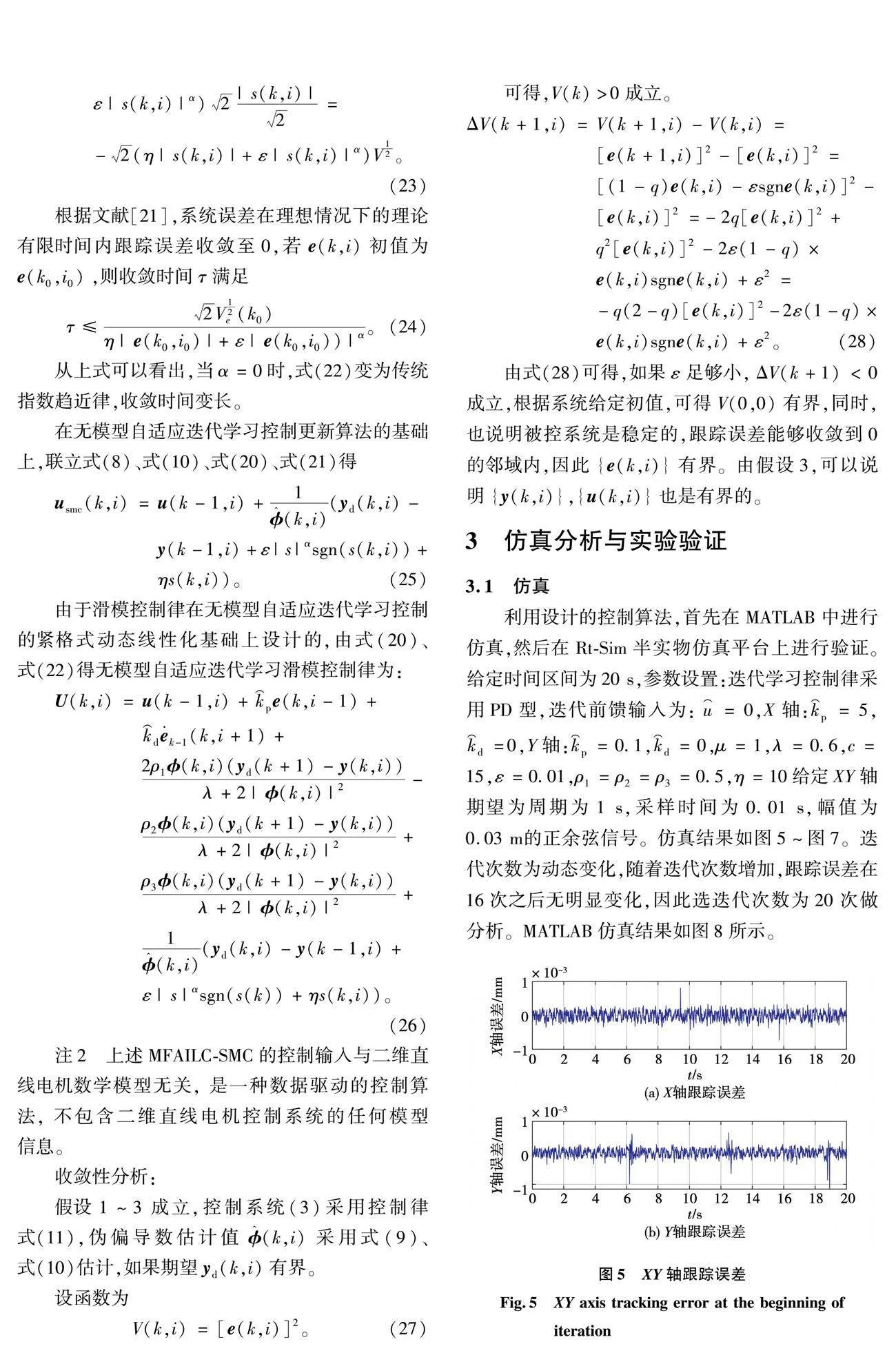
利用設(shè)計(jì)的控制算法,首先在MATLAB中進(jìn)行仿真,然后在Rt-Sim半實(shí)物仿真平臺(tái)上進(jìn)行驗(yàn)證。給定時(shí)間區(qū)間為20s,參數(shù)設(shè)置:迭代學(xué)習(xí)控制律采用PD型,迭代前饋輸入為: ,X軸: ,Y軸: , 給定XY軸期望為周期為1s,采樣時(shí)間為0.01s,幅值為0.03m的正余弦信號(hào)。仿真結(jié)果如圖5-7:迭代次數(shù)為動(dòng)態(tài)變化,隨著迭代次數(shù)增加,跟蹤誤差在16次之后無(wú)明顯變化,因此選迭代次數(shù)為20次做分析。MATLAB仿真結(jié)果如圖8所示:
圖5為迭代穩(wěn)定時(shí)XY軸跟蹤誤差,跟蹤誤差在一定范圍內(nèi)波動(dòng),驗(yàn)證了算法的有效性:盡管時(shí)間軸是變化的,但跟蹤誤差仍沿迭代軸收斂。
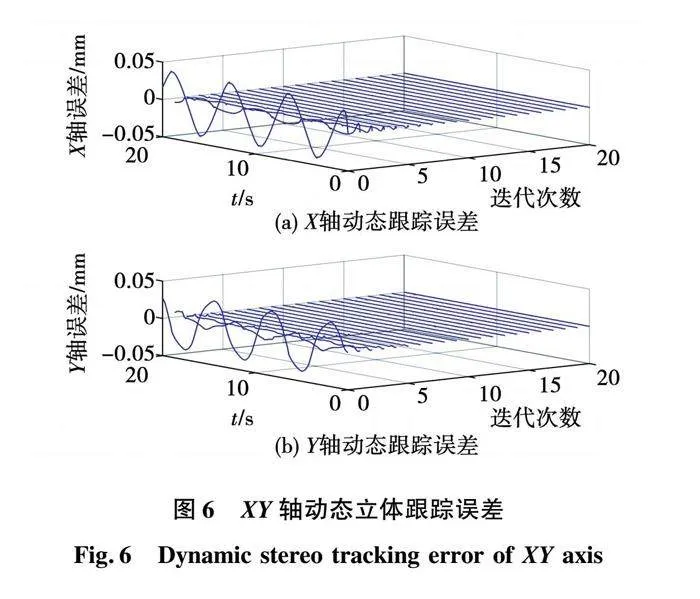
從圖6至圖7可以看出,跟蹤效果隨著時(shí)間軸和迭代軸的變化而變化。隨著迭代次數(shù)和采樣時(shí)間的增加,跟蹤誤差趨于穩(wěn)定。
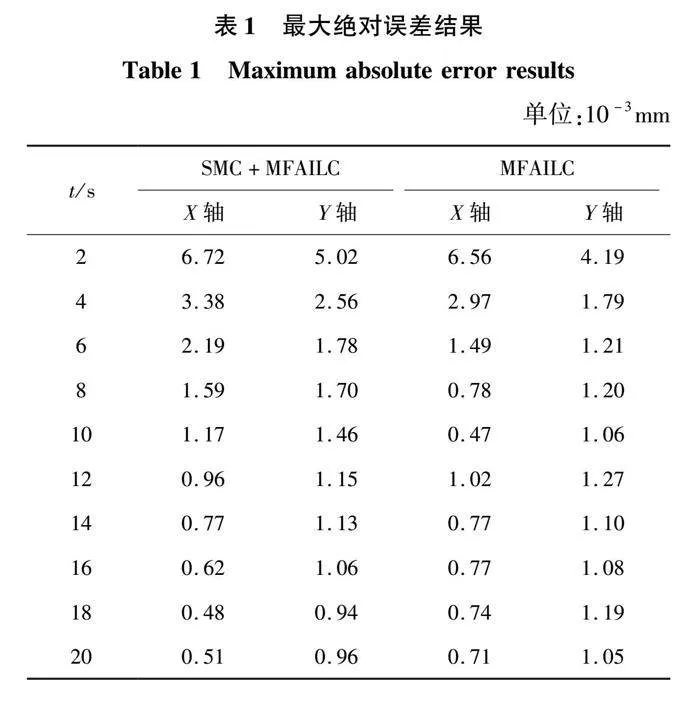
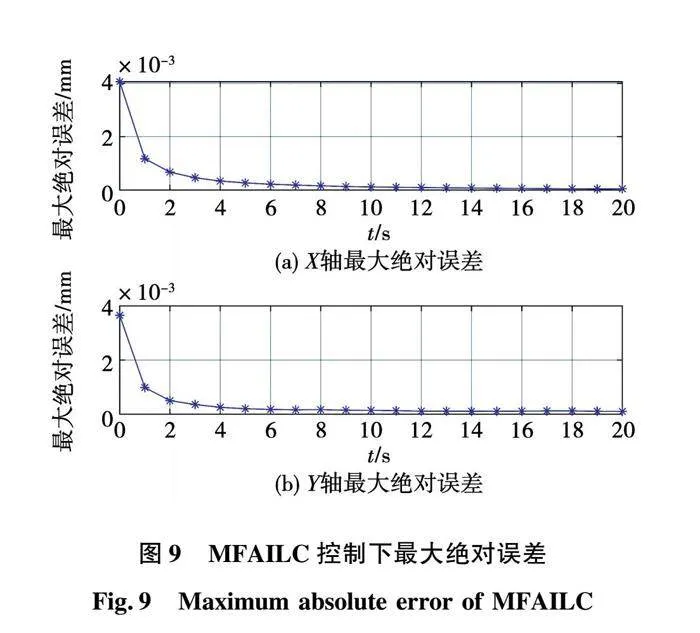
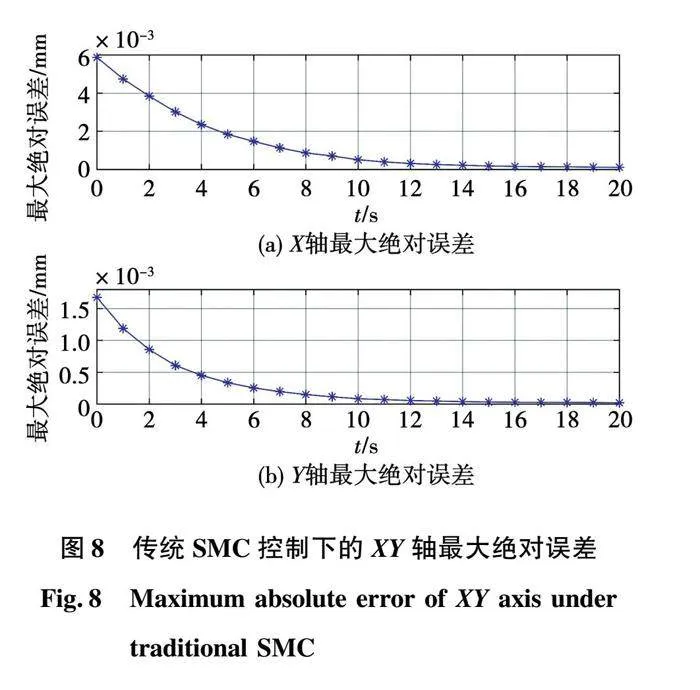
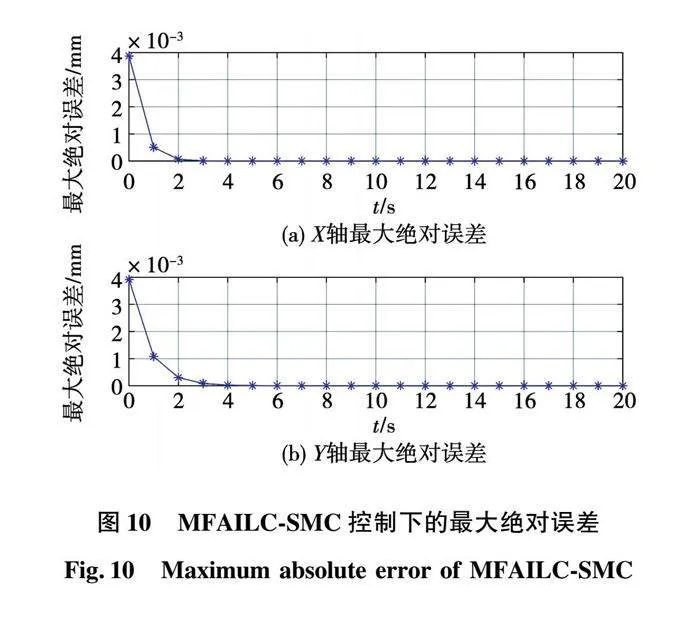
由仿真結(jié)果可見(jiàn),圖8至圖10為不同控策略下的最大絕對(duì)誤差。若存在參數(shù)設(shè)定值改變情況下,三種控制算法均獲得滿意的控制效果。從圖10與圖8可以看出,系統(tǒng)到達(dá)穩(wěn)定狀態(tài)的時(shí)間明顯縮短,加快了收斂速度;從圖10和圖9可以看出,XY軸最大絕對(duì)誤差明顯減小,同時(shí),MFAILC-SMC的收斂速度也明顯優(yōu)于MFAILC和SMC單獨(dú)作用時(shí)的動(dòng)態(tài)性能。從表1數(shù)據(jù)更加明顯得出加入SMC之后的MFAILC的控制算法優(yōu)于單獨(dú)MFAILC算法,驗(yàn)證了所提算法的可行性。
2.2 實(shí)物驗(yàn)證
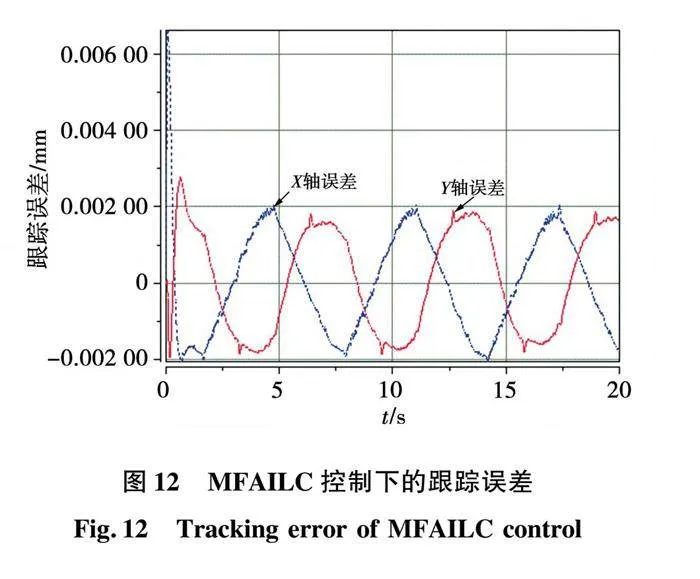
在RT-Sim半實(shí)物仿真平臺(tái)上進(jìn)行實(shí)物驗(yàn)證.參數(shù)設(shè)置與仿真參數(shù)設(shè)置相同,同時(shí)選取迭代次數(shù)為20次,初始參數(shù)不變,期望為正弦信號(hào),幅值設(shè)為0.03m,周期為1s,t為采樣時(shí)刻,采樣時(shí)間間隔為0.01s。
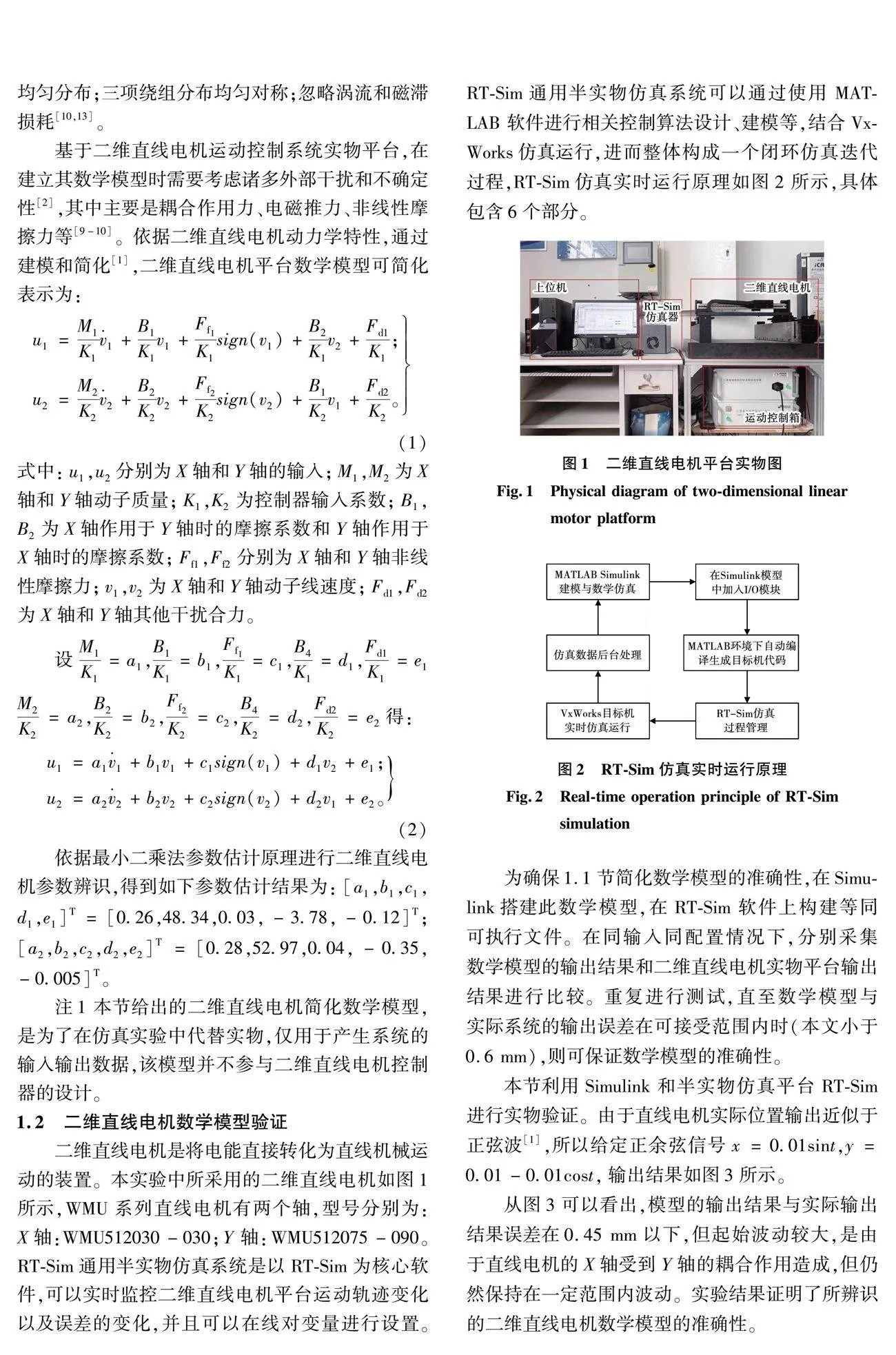
從11可以看出,直線電機(jī)的實(shí)際位置輸出曲線可以和期望軌跡曲線很好的擬合。在傳統(tǒng)SMC控制算法下的參數(shù)設(shè)置和在MFAILC-SMC控制算法下的參數(shù)設(shè)置可以保持不變,系統(tǒng)具有較強(qiáng)的魯棒性。從圖12至圖13可以看出,迭代次數(shù)的增加,直線電機(jī)的跟蹤誤差逐步減小,迭代16次以后,MFAILC控制精度穩(wěn)定在 范圍內(nèi);MFAILC-SMC控制精度穩(wěn)定在 范圍內(nèi),驗(yàn)證了所提方案的有效性。
同時(shí),與其他控制方案相比[22-23],文獻(xiàn)[22]雙軸跟蹤誤差穩(wěn)定在 ;文獻(xiàn)[23]迭代次數(shù)在達(dá)到80次時(shí),直線電機(jī)的位置誤差穩(wěn)定在 左右。從圖7和圖13可以看出MFAILC-SMC控制策略迭代次數(shù)和跟蹤誤差都有所降低,綜合可見(jiàn),本文所提MFAILC-SMC控制方案具有良好的跟蹤性能,從而驗(yàn)證了所提控制策略的優(yōu)越性。
3 結(jié)論
本文提出了一種基于改進(jìn)無(wú)模型自適應(yīng)迭代學(xué)習(xí)的滑模控制復(fù)合策略,首先在MFAILC準(zhǔn)則函數(shù)中加入對(duì)跟蹤誤差變化率的限制因子,然后在改進(jìn)緊格式動(dòng)態(tài)線性化MFAILC基礎(chǔ)上設(shè)計(jì)了新型滑模控制律,形成了復(fù)合MFAILC控制算法。改進(jìn)的MFAILC-SMC可以顯著減小系統(tǒng)跟蹤誤差,克服控制過(guò)程中的不穩(wěn)定現(xiàn)象,同時(shí)提高系統(tǒng)跟蹤精度和響應(yīng)速度,增強(qiáng)系統(tǒng)魯棒性,優(yōu)于單獨(dú)作用于二維直線電機(jī)傳統(tǒng)控制等方法,并對(duì)其收斂性進(jìn)行分析論證。仿真和實(shí)驗(yàn)結(jié)果表明,所提方案可將跟蹤誤差精度穩(wěn)定的控制在一定范圍內(nèi),降低系統(tǒng)狀態(tài)受參數(shù)變化的約束和外部擾動(dòng)的影響,并保證系統(tǒng)的收斂性,減小位置跟蹤誤差,提高了被控系統(tǒng)的整體動(dòng)態(tài)控制性能。
參 考 文 獻(xiàn):
[1] 曾子強(qiáng),曹榮敏,侯忠生,等.二維直線電機(jī)的多入多出無(wú)模型自適應(yīng)輪廓控制[J].控制理論與應(yīng)用,2020,37(5):1007.
ZENG Ziqiang, CAO Rongmin, HOU Zhongsheng, et al. Multiple input multiple output model free adaptive contour control for two-dimensional linear motors[J].Control Theory and Applications,2020,37(5):1007.
[2] WANG Yaoqiang, FENG Yutao, ZHANG Xiaoguang, et al. A new reaching law for antidisturbance sliding-mode control of PMSM speed regulation system[J].IEEE Transactions on Power Electronics, 2020,35(4). 4117.
[3] 武志濤,楊兆寧.永磁直線同步電機(jī)的雙閉環(huán)魯棒補(bǔ)償控制[J].電機(jī)與控制學(xué)報(bào),2022,26(3):102.
WU Zhitao, YANG Zhaoning. Double closed-loop robust compensation control for permanent magnet linear synchronous motors [J]. Electric Machines and Control,2022,26(3):102.
[4] 張康,王麗梅.基于周期性擾動(dòng)學(xué)習(xí)的永磁直線電機(jī)自適應(yīng)滑模位置控制[J].電機(jī)與控制學(xué)報(bào),2021,25(8):135.
ZHANG Kang, WANG Limei. Adaptive sliding mode position control for permanent magnet linear motor based on periodic disturbance learning[J]. Electric Machines and Control,2021,25(8):135.
[5] 東野亞蘭,楊淑英,王奇帥,等.基于增強(qiáng)型擴(kuò)張狀態(tài)觀測(cè)器的永磁同步電機(jī)低抖振高抗擾二階終端滑模電流控制[J].電工技術(shù)學(xué)報(bào),2024,39(8):2440.
DONGYE Yalan, YANG Shuying, WANG Qishuai, et al. Enhanced extended state observer based second order terminal sliding mode current control for permanent magnet synchronous machine with low chattering and improved disturbance rejection [J]. Transactions of China Electrotechnical Society,2024,39(8):2440.
[6] 趙希梅,孫洪瀟,金鴻雁.永磁直線伺服系統(tǒng)終端互補(bǔ)滑模位置控制[J].電機(jī)與控制學(xué)報(bào),2023,27(6):183.
ZHAO Ximei, SUN Hongxia, JIN Hongyan. Terminal complementary sliding mode position control for permanent magnet linear servo system[J]. Electric Machines and Control,2023,27(6):183
[7] 康爾良,蔡松昌.永磁同步電機(jī)自構(gòu)式模糊神經(jīng)網(wǎng)絡(luò)控制器設(shè)計(jì)[J].電機(jī)與控制學(xué)報(bào),2023,27(3):95.
KANG Erliang, CAI Songchang. Design of self-constructing fuzzy neural network controller for permanent magnet synchronous motor[J]. Electric Machines and Control,2023,27(3):95.
[8] 李耀華,趙承輝,周逸凡等.基于數(shù)據(jù)驅(qū)動(dòng)的永磁同步電機(jī)深度神經(jīng)網(wǎng)絡(luò)控制[J].電機(jī)與控制學(xué)報(bào),2022,26(1):118.
LI Yaohua, ZHAO Shenghui, ZHOU Yifan, et al. Deep neural network control for PMSM based on data drive [J]. Electric Machines and Control,2022,26(1):118.
[9] ZHANG Xiaoguang, HOU Benshuai, MEI Yang. Deadbeat predictive current control of permanent-magnet synchronous motors with stator current and disturbance observer[J]. IEEE Transactions on Power Electronics, 2017,32(5): 3820.
[10] JIANG Yajie, WEI Xu, MU Chaoxu, et al. Improved deadbeat predictive current control combined sliding mode strategy for PMSM drive system[J]. IEEE Transactions on Vehicular Technology,2018,67(1):258.
[11] 王天鶴,趙希梅,金鴻雁.基于遞歸徑向基神經(jīng)網(wǎng)絡(luò)的永磁直線同步電機(jī)智能二階滑模控制[J].電工技術(shù)學(xué)報(bào),2021,36(6):1233.
WANG Tianhe, ZHAO Ximei, JIN Hongyan. Intelligent second-order sliding mode control based on recurrent radial basis function neural network for permanent magnet linear synchronous motor [J]. Transactions of China Electrotechnical Society, 2021,36 (6): 1233.
[12] 趙希梅,王浩林,朱文彬.基于自適應(yīng)模糊控制器和非線性擾動(dòng)觀測(cè)器的永磁直線同步電機(jī)反饋線性化控制[J].控制理論與應(yīng)用,2021,38(5):599.
ZHAO Ximei, WANG Haolin, ZHU Wenbin. Feedback linearization control of permanent magnet linear synchronous motor based on adaptive fuzzy controller and nonlinear disturbance observer [J]. Control Theory and Applications,2021,38(5):599.
[13] 蘇普春,王麗梅.直驅(qū)H型平臺(tái)的非奇異快速終端滑模同步控制[J].組合機(jī)床與自動(dòng)化加工技術(shù),2020,(11):73.
SU Puchun, WANG Limei. Non-singular fast terminal sliding mode synchronous control for direct drive H-type platform [J]. Modular Machine Tool amp;Automatic Manufacturing Technique,2020(11):73.
[14] HOU Zhongsheng, JIN Shantai. Model free adaptive control-theory and applications[M]. Boca Raton: CRC Press, 2013.
[15] 侯忠生,韓志剛.非線性系統(tǒng)魯棒無(wú)模型學(xué)習(xí)自適應(yīng)控制[J].控制與決策,1995(2):139.
HOU Zhongsheng, HAN Zhigang. Robust model-free learning adaptive control for nonlinear systems [J]. Control and Decision,1995(2):139.
[16] 侯忠生, 金尚泰. 無(wú)模型自適應(yīng)控制:理論與應(yīng)用[M]. 北京: 科學(xué)出版社, 2013.
[17] 侯忠生, 王衛(wèi)紅, 金尚泰. 一類(lèi)非線性離散系統(tǒng)自適應(yīng)準(zhǔn)滑模控制[J]. 控制理論與應(yīng)用, 2009, 26(5): 507.
HOU Zhongsheng, WANG Weihong, JIN Shangtai. Adaptive quasi-sliding-mode control for a class of nonlinear discrete-time systems [J]. Control Theory amp; Applications, 2009, 26(5): 507.
[18] LIN Na, LI Huaying, CHI Ronghu, et al. Data-driven virtual reference set-point learning of PD control and applications to permanent magnet linear motors[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems,2023,53(7): 4149.
[19] LIU Tong, HOU Zhongsheng. Model-free adaptive containment control for unknown multi-input multi-output nonlinear MASs with output saturation[J]. IEEE Transactions on Circuits and Systems I: Regular Papers,2023,70(5): 2160.
[20] 王要強(qiáng),朱亞昌,馮玉濤,等.永磁同步電機(jī)新型趨近律滑模控制策略[J].電力自動(dòng)化設(shè)備,2021,41(1):195.
WANG Yaoqiang, ZHU Yachang, FENG Yutao, et al. New reaching law sliding mode control strategy for permanent magnet synchronous motor [J]. Power Automation Equipment,2021,41(1):195.
[21] SHAO Ke, ZHENG Jinchuan, HUANG Kang, et al. Finite-time control of a linear motor positioner using adaptive recursive terminal sliding mode[J]. IEEE Transactions on Industrial Electronics, 2019, 67(8): 6661.
[22] 王麗梅,郝中揚(yáng),方馨,等.基于自抗擾的H型平臺(tái)模糊神經(jīng)網(wǎng)絡(luò)同步控制[J].電氣工程學(xué)報(bào),2022,17(3):125.
WANG Limei, HAO Zhongyang, FANG Xin, et al. Fuzzy neural network synchronous control of H-type platform based on active disturbance rejection [J]. Journal of Electrical Engineering,2022,17(3):125.
[23] 趙云杰,曹榮敏,周惠興. 非圓車(chē)削系統(tǒng)的無(wú)模型自適應(yīng)迭代學(xué)習(xí)控制[J].控制工程,2018,25(10):1925.
ZHAO Yunjie, CAO Rongmin, HOU Zhongsheng. Model-free adaptive iterative learning control for noncircular turning system [J]. Control Engineering,2018,25(10):1925.
(編輯:劉素菊)
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
