基于YOLO v8-Tea的茶葉病害檢測方法
2024-09-27 00:00:00賈瀛睿龍陽胡蓉華崔艷榮桂余鵬
江蘇農業科學 2024年15期

摘要:針對真實場景下復雜的茶葉病害特征檢測準確率低、誤檢率和漏檢率高,以及難以進行移動設備上部署等問題,提出一種基于YOLO v8-Tea的茶葉病害檢測算法。該算法是在YOLO v8的基礎上做的改進,首先,替換了C2f中的Bottleneck,采用FasterBlock來減少參數量和計算量。同時,引入了多尺度注意力EMA模塊,以增強全局上下文信息的獲取。最后,采用BiFPN模塊,以更好地融合多尺度特征,并改進了頸部網絡,以提高檢測精度。結果表明,YOLO v8-Tea算法在平均精度方面比傳統YOLO v8n提高了5.7百分點,從而能更準確地檢測復雜的茶葉病害特征。與此同時,模型的參數量和計算量分別減少了47.9%和28.4%,模型的權重文件的大小減小了45.2%,僅為3.4 M。YOLO vs-Tea算法的平均精度比經典的YOLO系列算法中的YOLO v4-tiny、YOLO v5n、YOLO v6n、YOLO v7-tiny分別提高24.6、6.8、5.5、2.5百分點。這些改進使得本研究算法更適合茶葉病害檢測任務以及在移動設備中的高效部署。該算法在茶葉病害檢測方面取得了顯著的性能提升。通過降低參數量和計算量以及優化模型的部署,為實際農業場景中的茶葉病害檢測提供了一個更可行的解決方案,為茶葉產業提供了有前景的技術,可以提高茶葉病害檢測的效率和準確性。
關鍵詞:茶葉病害;檢測;YOLO v8-Tea;FasterBlock;EMA;BiFPN
中圖分類號:TP391.41;TP183;S435.711 文獻標志碼:A
文章編號:1002-1302(2024)15-0213-09
收稿日期:2023-09-22
基金項目:國家自然科學基金面上項目(編號:62077018);湖北省自然科學基金(編號:2023AFB082)。
作者簡介:賈瀛睿(1999—),女,吉林吉林人,碩士研究生,主要研究方向為深度學習與目標檢測。E-mail:2022710658@yangtzeu.edu.cn。
通信作者:胡蓉華,博士,講師,研究方向為網絡與信息安全。E-mail:hrh2016@yangtzeu.edu.cn。
茶葉作為世界范圍內的農產品,在多個國家的經濟和社會領域中扮演著至關重要的角色。其地位不僅僅因為其豐富的歷史和文化傳承,更因為其在國內外市場中的廣泛應用,以及對數百萬家庭的生計支持。然而,盡管對茶葉產業的前景看好,茶葉病害的爆發和傳播依然是一個嚴重的挑戰。
為解決這些問題,近年來,機器學習和深度學習技術在茶葉病害識別領域取得了顯著進展,為茶葉產業的可持續發展提供了新的希望。Billah等提出一種識別茶葉病害的模型,使用自適應神經模糊推理系統和顏色小波特征進行茶病害識別,能夠準確識別茶葉圖像中的病害[1]。Hossain等使用支持向量機分類器SVM來識別茶葉病害中的褐枯病和藻葉病,提高了檢測、鑒定和分類茶葉病害的效率[2]。Sun等提出了一種將簡單線性迭代聚類與支持向量機相結合的新方法,能夠有效從復雜背景中提取茶葉病害中顯著的特征[3]。Yang等提出了基于快速紅外熱圖像處理技術的茶病害檢測,通過病害的規律性和分布實現了快速檢測[4]。但是,經典機器學習方法在植物病害檢測中依賴于手工特征工程,需要專家知識來選擇和設計特征,而這些特征可能不適用于不同類型的病害和植物品種。而且,在處理復雜的圖像變化和細微特征時表現不佳,難以適應植物病害的多樣性和復雜性,導致其泛化能力有限,可能在實際應用中面臨性能挑戰。
深度學習技術通過神經網絡自動學習圖像特征,無需手工工程,能夠更好地應對復雜的植物病害檢測任務。Hu等提出了一種在自然場景圖像中茶葉枯病嚴重程度的估計方法,能夠有效地從茶葉中分割出疾病斑點的區域,并計算初始疾病嚴重程度指數[5]。Li等將Mask R-CNN、小波變換和F-RNet融合起來構建了一個茶葉病蟲害癥狀識別框架,結果表明,F-RNet模型的準確率高于AlexNet、VGG16和ResNet18等模型[6]。Xue等提出了一種基于YOLO-Tea的茶葉病蟲害檢測模型,在光線良好的情況下能夠更好地關注茶葉病蟲害的特征[7]。Lin等提出了一種基于注意力機制和特征融合的茶葉病害檢測模型,提高了抗復雜背景干擾的能力和全局特征提取的能力,能夠完成實時監測[8]。
然而,現有的深度學習模型仍然存在一些挑戰。其中,模型的訓練時間、檢測速度以及模型的大小對于實際農業場景的應用構成了限制。在這個背景下,本研究提出了一種基于YOLO v8-Tea的茶葉病害檢測算法,該算法通過改進YOLO v8,旨在提高模型的檢測精度,并將模型輕量化,以滿足在移動設備終端進行實時監測的需求。本研究的主要貢獻包括以下方面:
(1)替換C2f中的Bottleneck為FasterBlock,有效減少了模型的參數量和計算量。這一改進不僅提高了模型的運行效率,還保持了檢測性能的穩定性[9]。
(2)添加EMA模塊,以增強模型對全局上下文信息的獲取能力。這有助于模型更好地理解圖像中不同尺度特征之間的關聯,從而提高了檢測的準確性[10]。
(3)引入BiFPN模塊,該模塊有助于將來自不同尺度的特征信息有效地整合在一起,提高了模型對目標的檢測和定位能力[11]。
(4)改進頸部網絡,以進一步提高檢測的精度。通過優化頸部網絡的結構,成功降低了誤檢率和漏檢率,并提高了模型在實際農業場景中的表現。
1 材料與方法
1.1 數據集介紹
試驗數據集是來源于Roboflow中的Tea leaves diseases數據集,包含1 153張真實場景下拍攝的茶葉病害圖片,其中包括茶葉中常見的藻斑病、云紋葉枯病、灰疫病3種病害。因為1張圖片中可能會存在多種病害特征,所以數據集經過人工預處理,通過labelimg標注軟件在原始數據集上對遺漏、偏移、錯誤等的標簽數據集進行人工標注,得到xml格式的標注文件,進而將xml格式文件轉為YOLO訓練的txt格式文件,然后將數據集按照8 ∶1 ∶1進行劃分訓練集、驗證集、測試集。
1.2 YOLO v8網絡結構
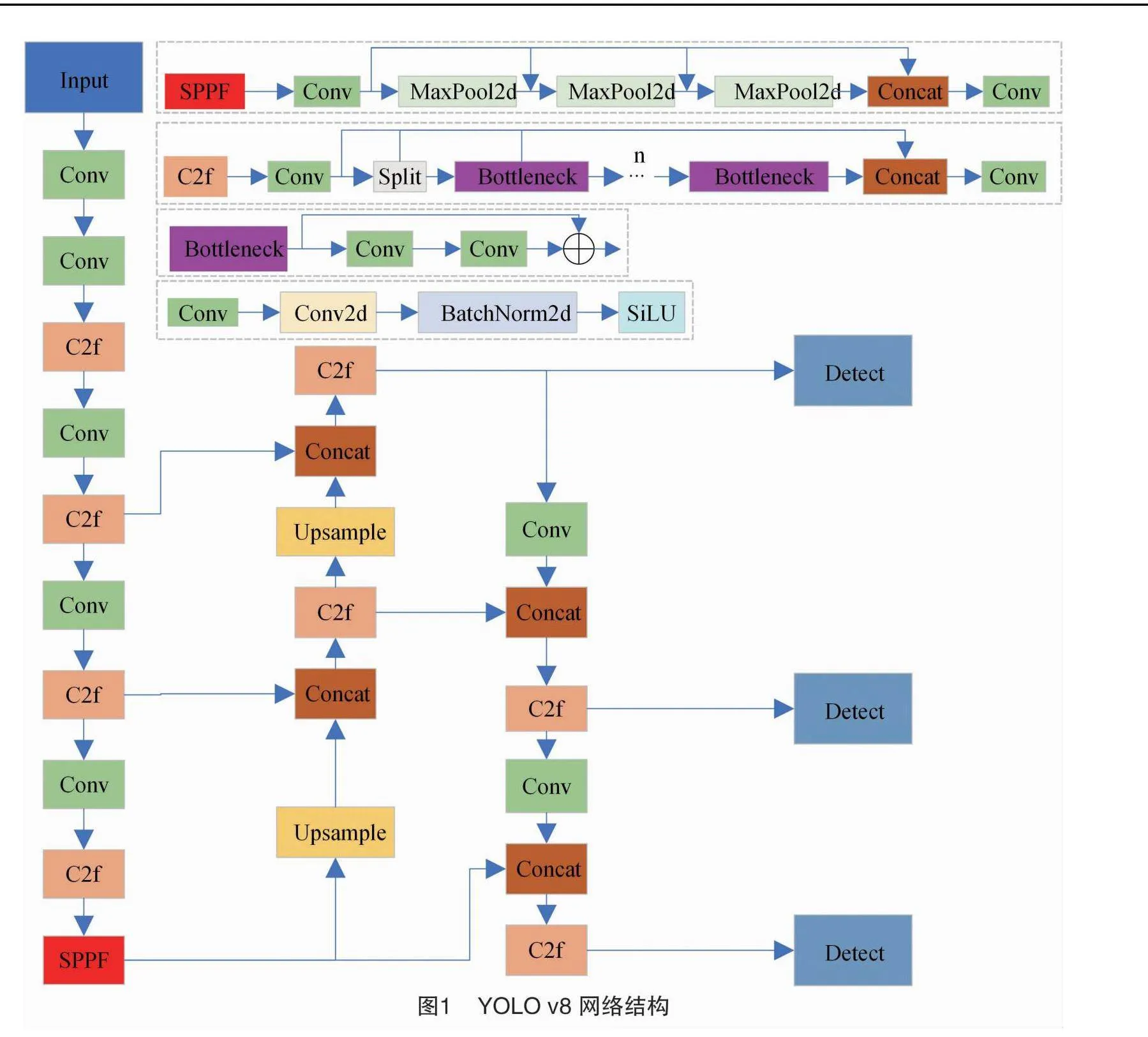
YOLO v8作為最新的YOLO系列[12-19] 的模型,根據網絡結構的深度和寬度可分為n、s、m、l和x共5個網絡模型,其中YOLO v8n是體積最小網絡模型,其模型結構由輸入端、主干網絡、頸部、輸出端4個部分組成,具體如圖1所示。輸入端包括數據增強、自適應錨框和圖片縮放等數據預處理操作;主干網絡部分跟YOLO v5不同的是將C3模塊換成了C2f模塊,C2f模塊通過密集的殘差結構增強了卷積神經網絡的特征融合能力,通過拆分和拼接操作改變了通道數,使主干網絡更輕量化,也提高了推理速度。尾部采用的SPPF空間金字塔池化層來增強主干網絡的感受野,并融合不同尺度下的特征;頸部采用了PANet結構和C2f模塊來進行特征聚合,將淺層信息向深層信息進行聚合;輸出端采用了解耦頭結構,將檢測和分類進行分離,根據p3、p4和p5這3個解耦頭來檢測不同尺度下的物體。
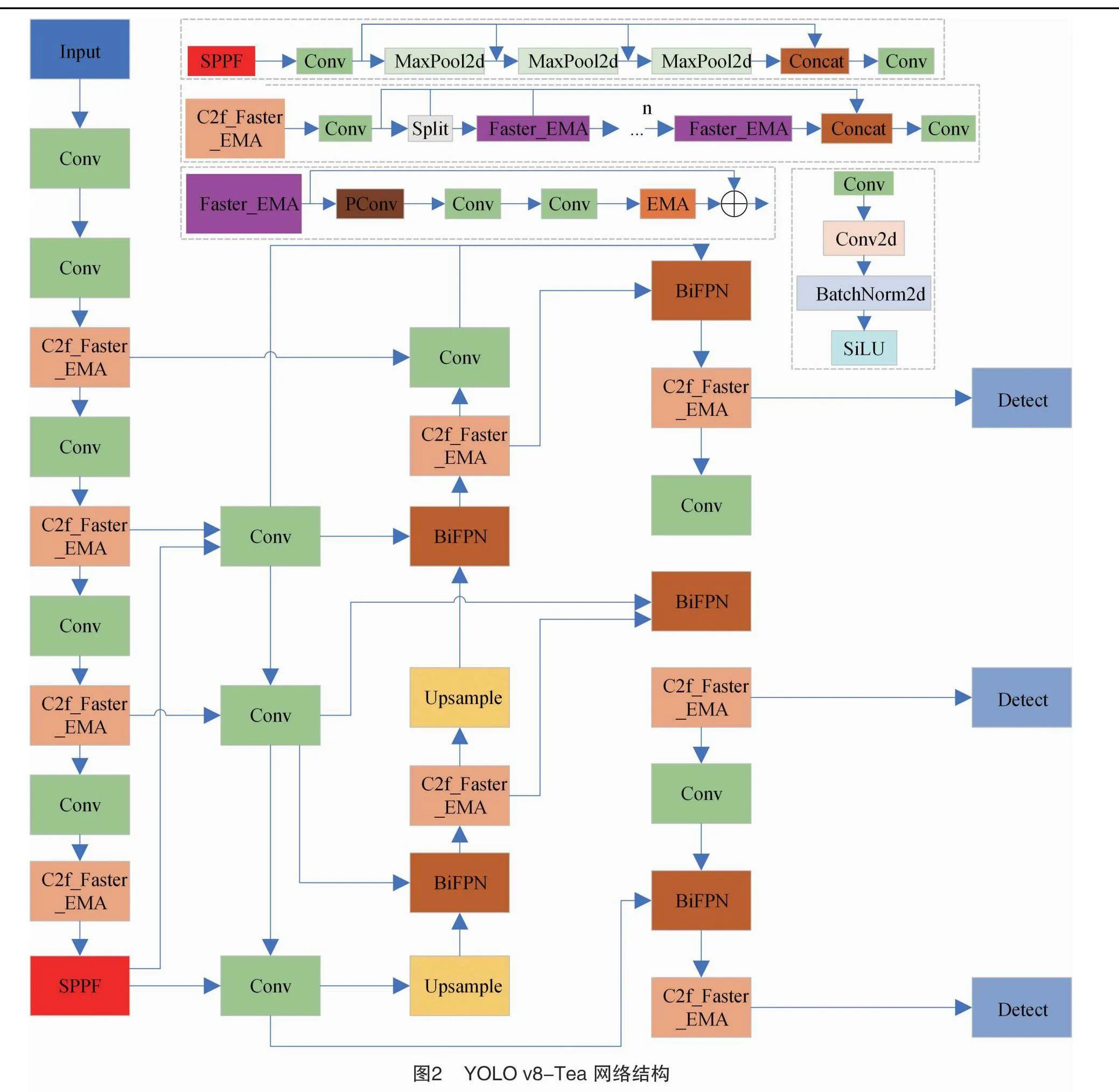
1.3 YOLO v8-Tea網絡結構
本研究算法YOLO v8-Tea是在YOLO v8的基礎上做出的改進,如圖2所示。將FasterBlock和EMA整合為Faster_EMA模塊,取代C2f中的Bottleneck模塊,形成C2f_Faster_EMA,以替代原網絡中所有C2f模塊。然后將頸部網絡替換為本研究改進的頸部網絡,并將Fusion參數設置為本研究所采用的BiFPN結構。
1.3.1 FasterBlock模塊
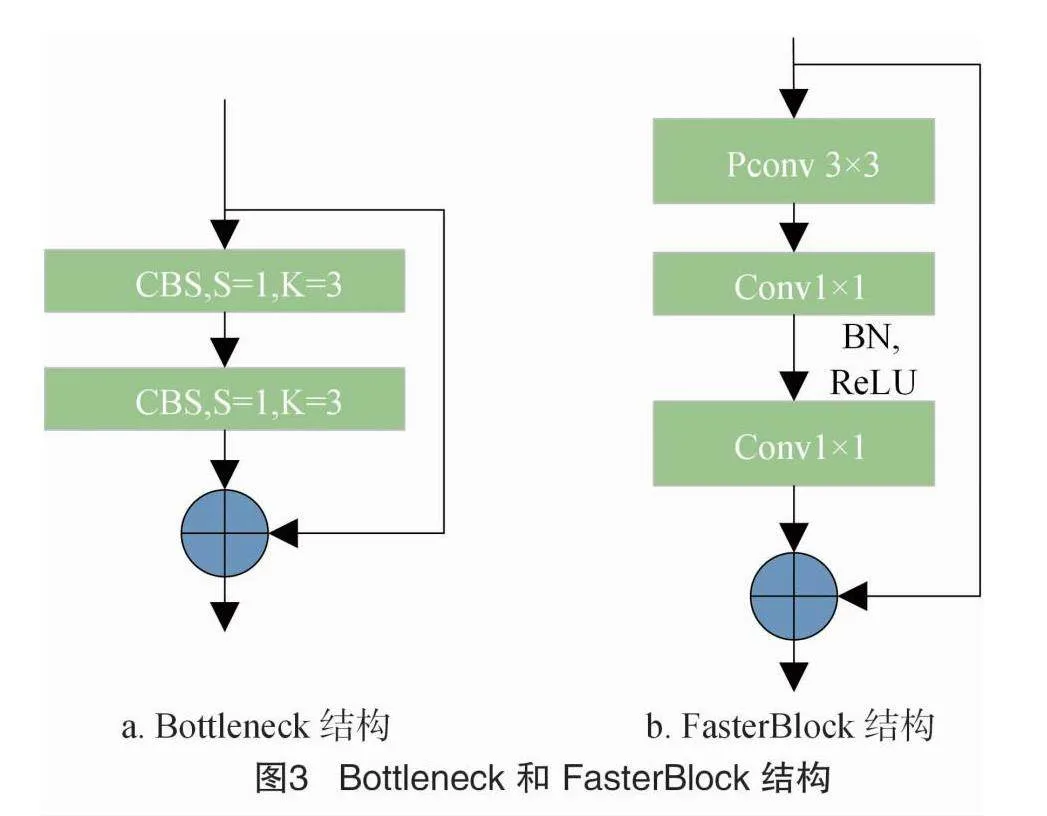
在YOLO v8n原始的C2f模塊中,通過堆疊很多Bottleneck結構,雖然可以使得主干網絡能夠學習到不同尺度下的特征,但是同時也導致通道信息的過度冗余和較大的計算量。在本研究算法中,為減少主干網絡中計算復雜度,以便于更好地充分利用設備上的計算能力,同時提高主干網絡的空間特征提取能力,用FasterBlock模塊替換掉了C2f中的Bottleneck結構。
FasterBlock模塊如圖3所示 先通過一個PConv卷積層,與常規卷積不同的是PConv在保持其他通道不變的情況下,只會在輸入通道上的一部分做常規的卷積來進行空間特征提取。因此,這樣就會減少后續卷積層的計算和內存訪問,使得PConv的FLOPs是常規卷積的1/16,內存訪問量是常規卷積的1/4。后面接著進行了2個1×1的卷積層,來完成前面PConv未卷積的部分。第1個 1× 1卷積層用于降低特征通道的數量,以減少計算成本和參數量。接著進行歸一化和激活函數操作,引入非線性性質,使得模型能夠學習非線性特征變換,以更好地適應特征的復雜性。第2個1×1卷積層用于調整特征通道的數量,來保證輸入和輸出的維度統一,以便于后面的殘差連接。因此,在改進的模型上很大程度減少了參數量和計算量,并提高了模型的檢測精度,在試驗結果中也得到了驗證。
1.3.2 EMA注意力機制
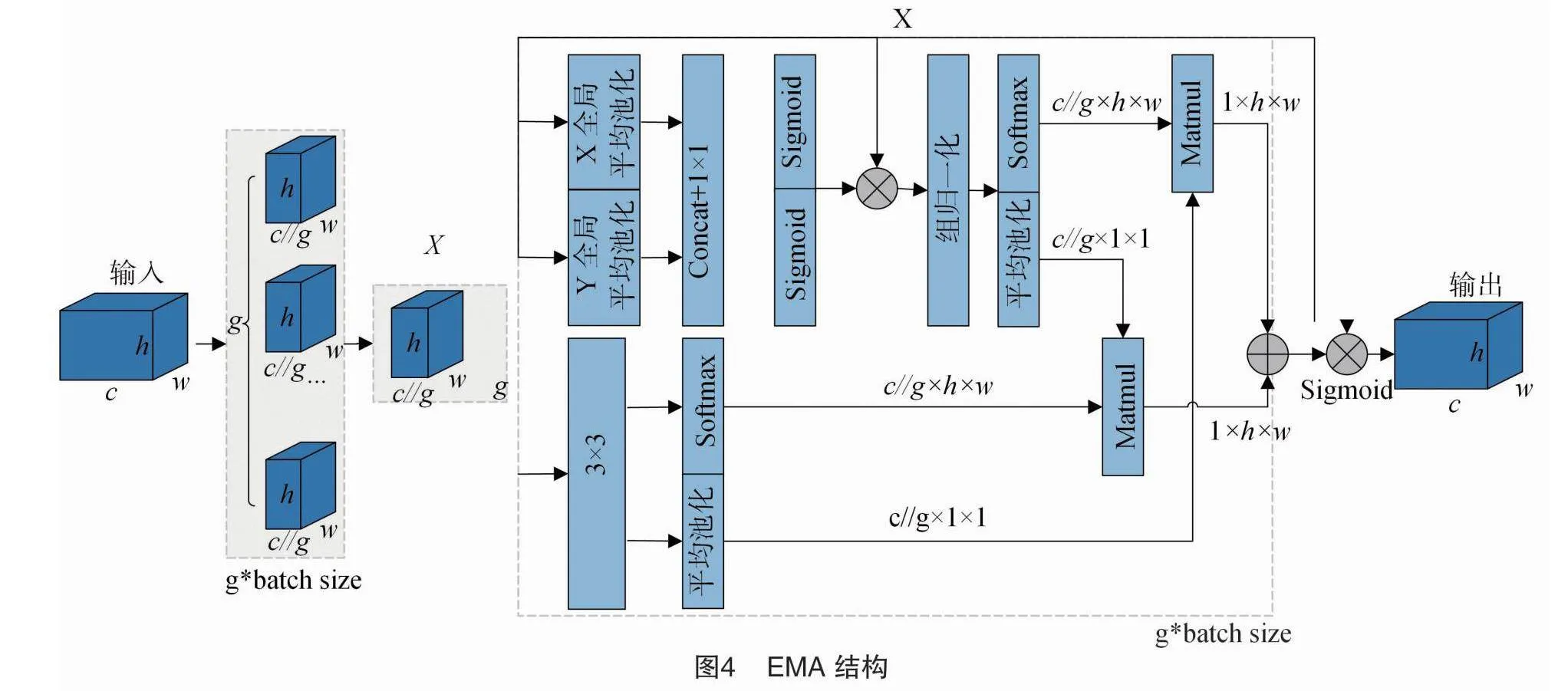
為了在提取特征時就考慮到通道位置和空間位置之間的相互作用,又能充分利用上下文信息,同時又一定程度上降低模型的復雜度,本研究在YOLO v8n中引入了EMA注意力模塊,如圖4所示,主要可以分為特征分組、并行子網、跨空間學習3個部分。
1.3.2.1 特征分組
首先,EMA將輸入特征圖的通道維度劃分為g個子特征,其中每個子特征都用來獲得更多的語義信息。并且在不損失一般性的前提下,每個注意力權重描述符都可以用來表示每個子特征中的感興趣區域。
1.3.2.2 并行子網
然后將劃分好的子特征通過一個3條平行路線的并行子網,其中通過2個1×1分支先分別沿2個空間方向對通道進行全局平均池化操作,再通過共享權值的1×1卷積,隨后通過Sigmoid激活函數來擬合線性卷積后的二維分布,繼而跟原子特征進行殘差連接,這樣能夠聚合多尺度空間結構信息。3×3分支路徑通過3×3卷積來捕獲局部跨通道交互以擴大特征空間,同時采用并行放置以實現快速響應。
1.3.2.3 跨空間學習
在這里是引入了2個1×1分支的輸出和3×3分支的輸出來進行不同空間維度方向的跨空間信息聚合方法。先利用組歸一化來處理1×1分支的輸出,隨后利用二維全局平均池化來進行全局空間信息編碼,并且將最小支路的輸出轉化為對應的維度形狀。繼而通過二維高斯映射的自然非線性函數Softmax來擬合以上的線性變換,并將輸出結果與矩陣點積運算相乘,就得到了第1個空間注意力特征圖,同時也收集了不同尺度的空間信息。在處理3×3分支的輸出結果時同樣采用二維全局平均池化進行全局空間信息的編碼,隨后經過Softmax函數,并轉換為相應的維度形狀,就得到了第2個空間注意力特征圖。
最后將生成的2個特征圖的權重進行聚合,然后使用Sigmoid函數,這樣最后的輸出結果即捕獲像素級的成對關系,也突出顯示所有像素的全局上下文。通過試驗結果可得,將EMA放入到本研究改進的模型中是有效的。
1.3.3 BiFPN結構
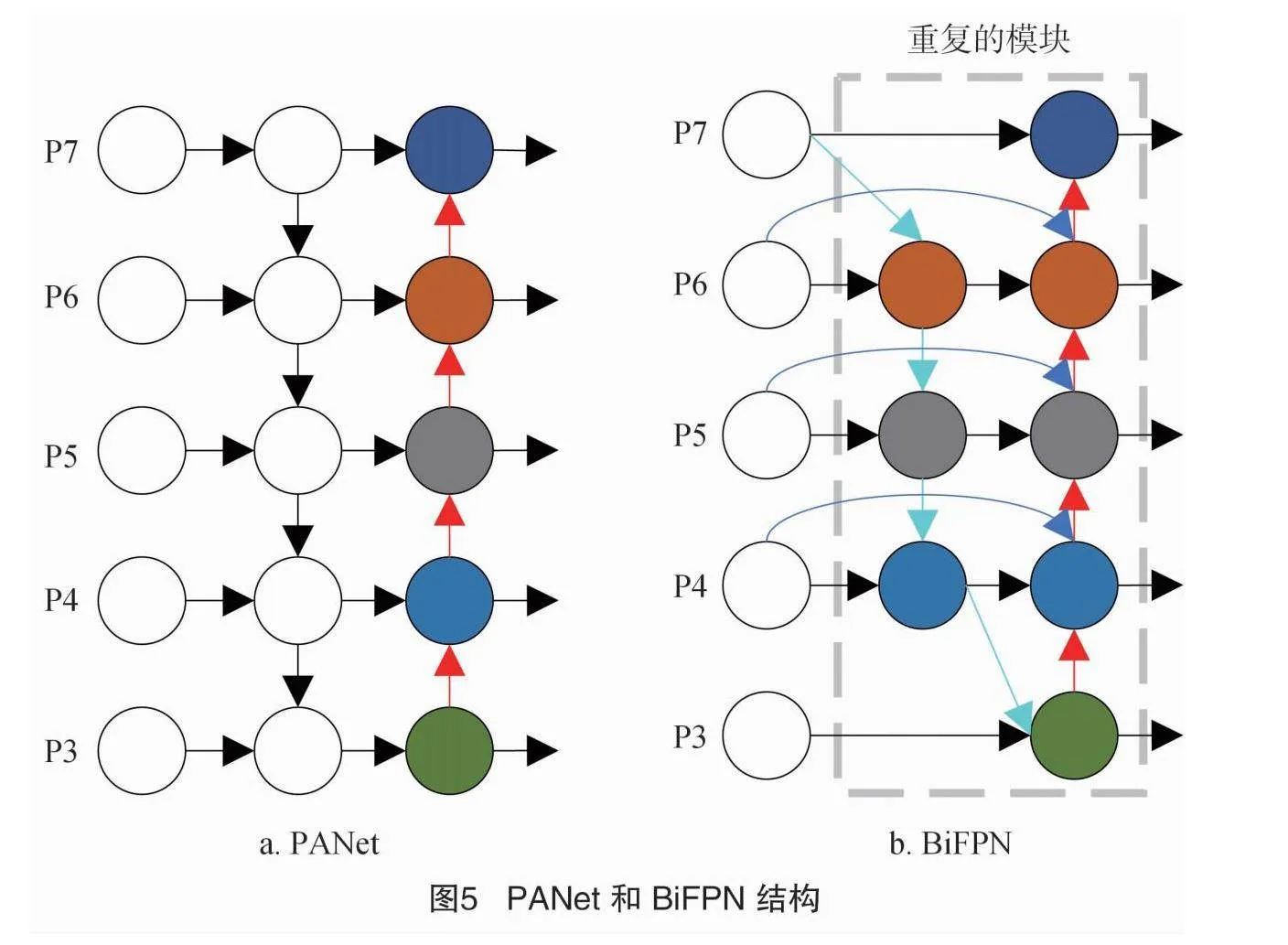
雖然PAnet的目標是改進特征金字塔網絡,但它引入了大量的額外復雜性。PAnet的多路徑聚合結構包括多個路徑選擇和路徑權重組件,這增加了模型的復雜性和計算成本。復雜性不僅體現在模型的設計中,還包括訓練和部署的難度。需要大量的計算資源來訓練PAnet,并且在實際應用中,部署一個復雜的模型可能會受到硬件限制。這些問題引出了BiFPN結構作為一種更好的替代方案的可能性。由圖5可知,BiFPN被設計為解決PAnet的復雜性問題,同時提供更高的效率和靈活性。相對于PAnet的多路徑聚合,BiFPN引入了自適應的連接權重,從而降低了模型的復雜性。這種自適應性使得BiFPN更容易訓練和調整,并且在資源有限的情況下也能夠高效運行。
BiFPN通過引入自適應連接權重來簡化特征金字塔網絡,提高了效率和靈活性,同時降低了訓練和部署的難度。因此,將PAnet替換為BiFPN可能是一個明智的選擇,在后面改進模型的試驗結果中也證明了其有效性。
1.3.4 改進頸部網絡
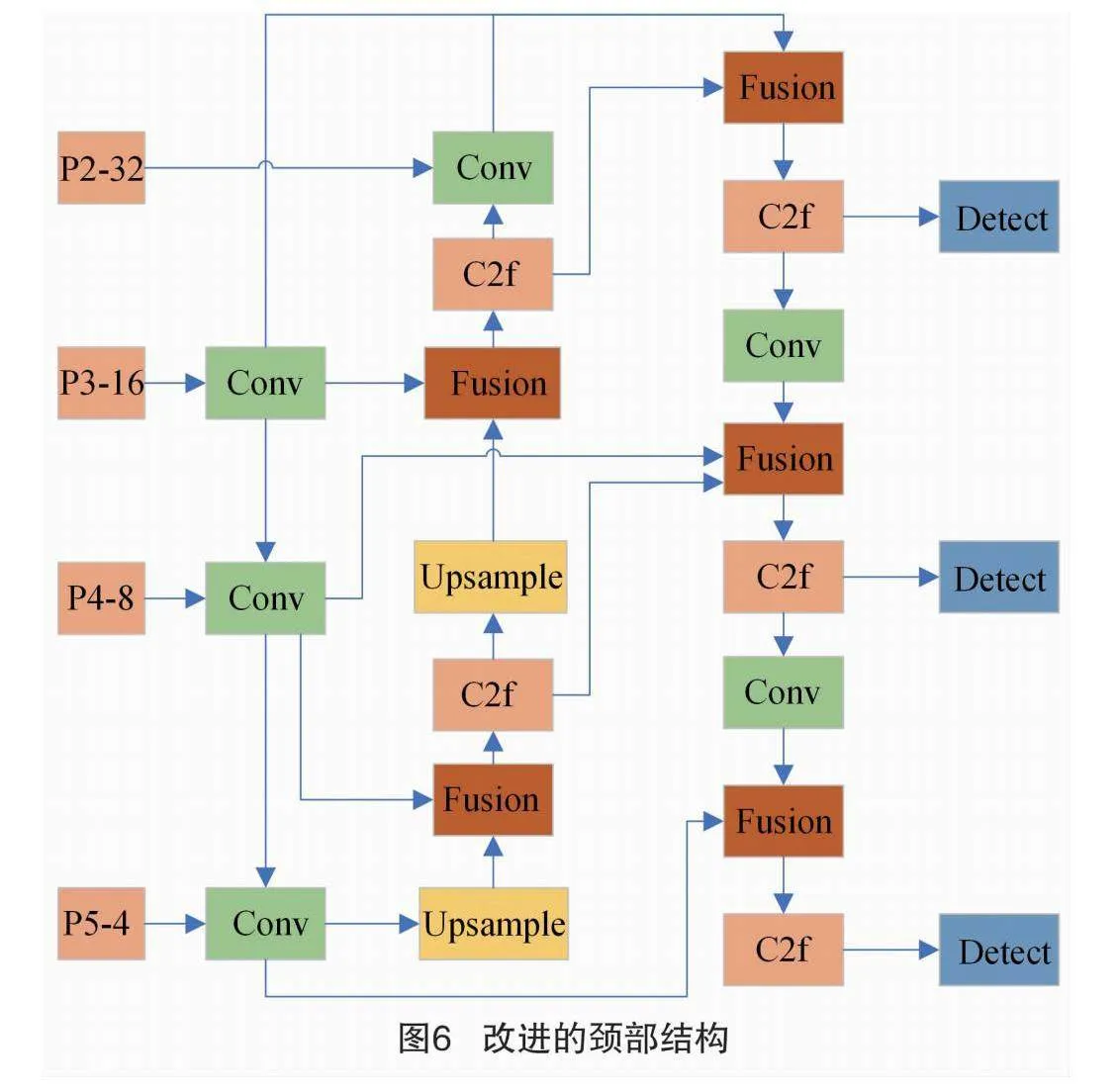
在原始YOLO v8網絡結構中,頸部網絡可能不夠靈活,難以適應各種不同的任務需求,它的設計可能過于通用,不能有效地滿足特定任務的要求。這可能導致性能下降,尤其是在復雜的計算機視覺任務中。在許多計算機視覺任務中,多尺度信息對于準確的目標檢測非常重要。然而,原始頸部網絡可能沒有足夠的機制來處理不同尺度上的特征,從而可能導致遺漏或錯誤檢測目標。由于本研究使用的茶葉病害數據集中,病害的特征復雜,特征大小不統一,因此為了更好地滿足茶葉病害特征的目標檢測,本研究通過修改頸部網絡結構,來增加模型的靈活性和多尺度感知能力,使其更加適用于實際應用場景。
首先,如圖6所示,因為BiFPN結構中涉及到一些add(數值相加)操作,所以本研究將頸部網絡的通道數都固定為256,然后在原始頸部網絡結構上先添加了3個卷積層,將主干網絡中的p2、p3、p4、p5的輸出的通道數進行統一,以便于后續的融合操作。并且把主干網絡中的p2也給充分利用起來,通過1個卷積層就能多添加1個節點,省去了前面的操作,也能夠為模型進一步提升多尺度感知能力。最后在頸部網絡后再添加了3層,分別是Conv、Fusion、C2f,這樣能夠幫助網絡更好地學習圖像特征,提高模型的表示能力,并且通過Fusion層來融合不同層的信息,增加多尺度目標的感知能力。本研究改進的頸部網絡中,Fusion的融合方式有Weight、Adaptive、Concat和BiFPN這4個方式,而本研究使用的是BiFPN的方式,其有效性也2146c8e2fe6e1b197f01e6d441e9ad830b50b987d6d17616fa9bca0572d39151在后面的試驗部分得到了證明[20]。
2 結果與分析
2.1 評價指標
本研究采用的評價指標有Precision、Recall、mAP、參數量、計算量、模型權重大小。其中,Precision是指模型所識別的目標中真正正確的比例。它衡量了模型的準確性,高精確率表示模型更少地將錯誤的對象識別為目標。定義如下:
Precision=TPTP+FP×100%。(1)
Recall是指模型成功識別的目標占實際目標總數的比例。它衡量了模型是否能夠捕獲到所有實際目標,高召回率表示模型漏掉的目標較少。定義如下:
Recall=TPTP+FN×100%。(2)
式中:TP表示檢測結果中正確目標的個數,FP表示檢測結果中錯誤目標的個數,FN表示正確目標中缺失目標的個數。
mAP是一種綜合評價指標,它考慮了不同類別的精確率和召回率,并計算它們的平均值。較高的mAP表示模型在多個類別上表現良好。定義如下:
mAP=1n∑ni=1∫10Precision(Recall)d(Recall)。(3)
參數量表示模型的復雜度,較低的值通常表示模型更輕量化,有助于在資源有限的情況下部署。計算量是模型進行推理所需的浮點運算次數的度量。它可以幫助評估模型的計算資源需求,對于在嵌入式設備或云計算環境中部署模型非常有用。模型權重大小即存儲模型所需的內存空間,較小的模型大小通常意味著更輕量化和更容易部署。
2.2 試驗環境配置
本試驗是使用PyTorch作為網絡框架,硬件環境配置為NVIDIA GeForce RTX 3080,顯存12 G,編譯環境為Python 3.8.16+torch 2.0.0+CUDA1 1.8。在訓練時,超參數設置批大小為32,訓練周期為300,初始學習率為0.01。試驗時間為2023年7—9月,試驗地點為長江大學農學院與計算機科學學院。
2.3 消融試驗
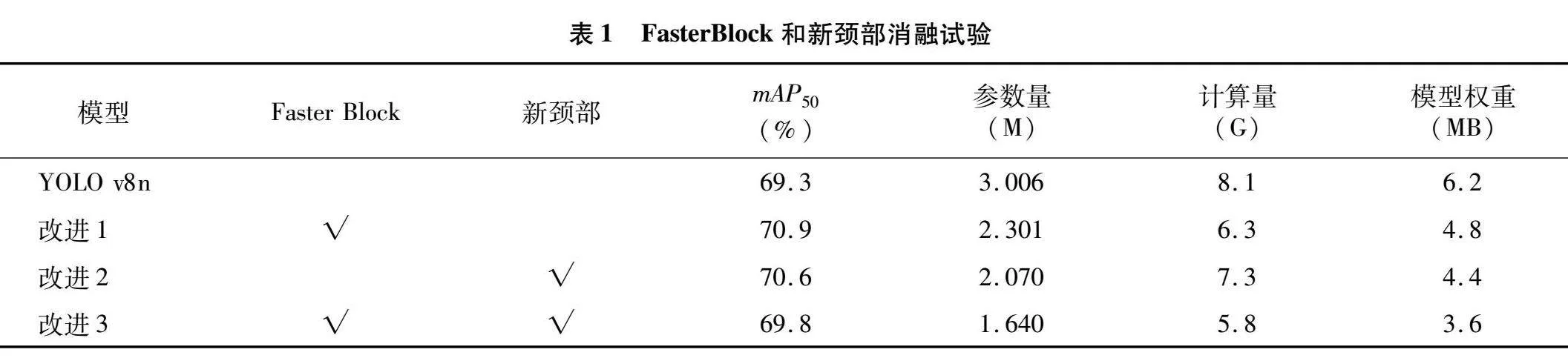
2.3.1 FasterBlock和新頸部消融試驗
為驗證用FasterBlock模塊替換掉Bottleneck模塊和改進的頸部網絡對網絡性能的影響,設計了如表1所示的消融試驗。可以看出,改進1和改進2分別將改進后的新頸部和FasterBlock引入到原YOLO v8n模型后,根據它們的結構特性,模型權重大小、參數量和計算量都有所下降,而且模型精度也有所提升。改進3是將2個改進點融合的試驗結果,雖然模型的精度僅提升了0.5百分點,但是模型的權重、參數量和計算量比改進1和改進2都要少。因此,根據試驗結果可證明這2個改進的有效性。
2.3.2 EMA消融試驗
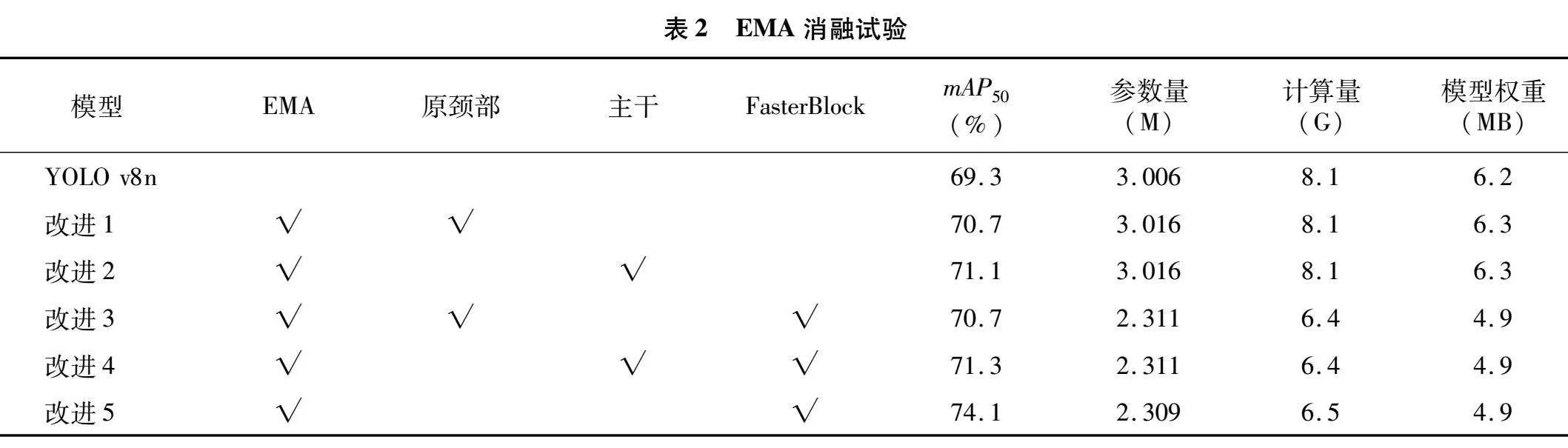
本研究引入EMA注意力機制后,為驗證其在不同位置與網絡性能的關系,設計了表2所示的消融試驗。可以看出,改進1和改進2將EMA融入到原始頸部網絡和主干網絡后,雖然mAP有所提升,但是對模型的權重、參數量和計算量影響不大,并沒有下降。隨后改進3和改進4是在C2f替換了FasterBlock之后EMA融入到原始頸部網絡和主干網絡所得的結果,在改進1和改進2的基礎上,模型的權重大小、參數量和計算量都有所下降。最后改進5是將EMA融入到FasterBlock模塊中,結果表明,在改進3和改進4的基礎上,模型的mAP又有所提升,可得出將EMA融入到FasterBlock模塊中是最有效的。
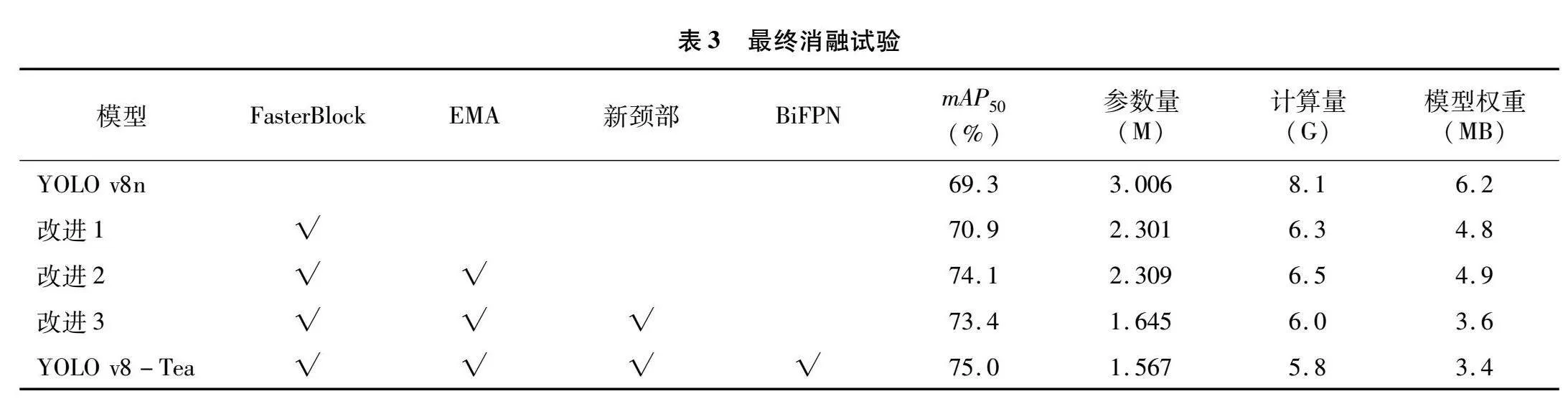
2.3.3 最終消融試驗
為驗證本研究所有改進點的有效性,建立了改進1、改進2、改進3、YOLO v8-Tea這4個模型進行試驗。改進1是將所有的C2f中的Bottleneck模塊替換為FasterBlock模塊;改進2是在FasterBlock中加入了EMA注意力機制;改進3是在前面改進基礎上將頸部網絡替換為新的頸部網絡;最后,YOLO v8-Tea是本研究的改進算法,將4個改進點融合起來。由表3可看出,本研究的YOLO v8-Tea相較于原始YOLO v8n,mAP50提升了5.7百分點,參數量減少47.9%,計算量降低了28.4%,模型的權重減少了45.2%。試驗結果表明,本研究算法有效地降低了模型在移動終端部署難度與成本,并且使得算法在檢測茶葉病害的精度上有了較大的提升。
2.4 對比試驗
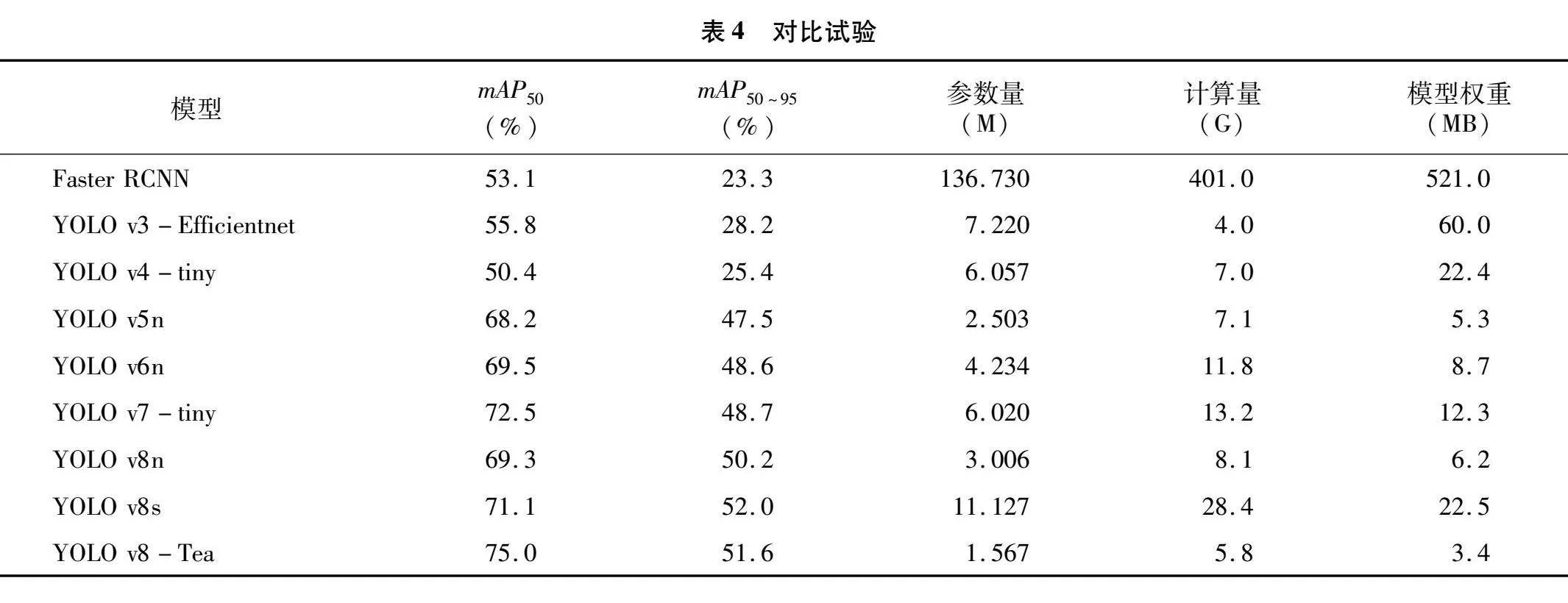
由表4可知,通過對比所有模型的性能指標,可以清晰地看出本研究提出的YOLO v8-Tea算法在目標檢測任務中具有明顯優越性。首先 YOLO v8-Tea 的mAP50達到了75.0%,明顯高于其他模型,表明其在物體定位方面具有出色的準確性。與Faster RCNN相比,YOLO v8-Tea的性能提高了超過20百分點,這意味著它在檢測較難的物體上表現出了更好的性能,具備更高的魯棒性[21]。此外,YOLO v8-Tea在模型參數量、計算復雜度和模型大小方面也表現出眾。它具有僅1.567 M的模型參數量,相對較小的模型體積,適合嵌入式設備和移動端應用。同時,它的計算復雜度只有5.8 G,這意味著在保持高性能的同時,能夠實現快速的推理速度。
綜上所述,本研究提出的YOLO v8-Tea算法在mAP、參數量、計算復雜度和模型大小等多個方面均表現出較大的優勢,具有高性能和輕量化特性,使其在茶葉病害檢測中具有廣泛的應用潛力。
2.5 可視化結果分析
為直觀體現本研究算法的有效性,通過對比5組圖片,分別使用傳統的YOLO v8n算法和本研究算法YOLO v8-Tea對5張原始圖片進行檢測,詳見圖7。從對比圖中可以看出,YOLO v8-Tea較原始YOLO v8n的檢測精度有所提升。通過第2組和第3組對比圖可以看出,原始YOLO v8n在復雜環境中將經陽光暴曬的茶葉和枝干誤檢。通過第4組和第5組對比圖可以看出,原始YOLO v8n存在漏檢,而YOLO v8-Tea對茶葉病害特征的注意力更為集中,提高了病害特征的識別率。總的來說,改進后的算法在提高精度的同時,還減少了誤檢率和漏檢率,更適合在真實的復雜場景中對茶葉病害進行檢測。
3 結論
針對真實場景下茶葉病害檢測的識別任務,本研究提出了一種基于YOLO v8-Tea的茶葉病害檢測方法。首先,通過用Faster block模塊替換Bottleneck模塊和引入新頸部網絡,觀察到模型的性能在精度方面有所提高,同時參數量、計算復雜度和模型大小都有所減少。這表明這些改進點在提高模型性能的同時也有助于輕量化。其次,本研究引入了EMA注意力機制,并進行了一系列消融試驗,以探討其在不同位置融入網絡的影響。結果表明,在將EMA注意力機制融入到C2f_Faster模塊中時,模型性能獲得了最大提升。最后,與其他相關模型相比,YOLO v8-Tea在mAP50和mAP50~95 方面都表現出色,分別達到了75.0%和51.6%,模型參數量僅為1.567 M,計算復雜度為5.8 G,模型權重比原始YOLO v8n減少了45.2%。這使得YOLO v8-Tea成為一種出色的目標檢測算法,適用于多種應用場景,包括嵌入式系統和移動端應用。
綜上所述,本研究提出的YOLO v8-Tea算法在目標檢測任務中取得了較好的性能優勢,同時實現了模型的輕量化,為真實場景下茶葉病害檢測的應用提供了更高效、更準確的解決方案。未來的研究方向可以包括進一步優化算法、提高茶葉病害的檢測精度以及在實際中部署到移動設備中進行茶葉病害的檢測。
參考文獻:
[1]Billah M,Badrul M,Hanifa A,et al. Adaptive neuro fuzzy inference system based tea leaf disease recognition using color wavelet features[J]. Communications on Applied Electronics,2015,3(5):1-4.
[2]Hossain S,Mou R M,Hasan M M,et al. Recognition and detection of tea leafs diseases using support vector machine[C]//2018 IEEE 14th International Colloquium on Signal Processing & Its Applications (CSPA).Penang,Malaysia:IEEE,2018:150-154.
[3]Sun Y Y,Jiang Z H,Zhang L P,et al. SLIC_SVM based leaf diseases saliency map extraction of tea plant[J]. Computers and Electronics in Agriculture,2019,157:102-109.
[4]Yang N,Yuan M F,Wang P,et al. Tea diseases detection based on fast infrared thermal image processing technology[J]. Journal of the Science of Food and Agriculture,2019,99(7):3459-3466.
[5]Hu G S,Wei K,Zhang Y,et al. Estimation of tea leaf blight severity in natural scene images[J]. Precision Agriculture,2021,22(4):1239-1262.
[6]Li H,Shi H T,Du A H,et al. Symptom recognition of disease and insect damage based on Mask R-CNN,wavelet transform,and F-RNet[J]. Frontiers in Plant Science,2022,13:922797.
[7]Xue Z Y,Xu R J,Bai D,et al. YOLO-tea:a tea disease detection model improved by YOLO v5[J]. Forests,2023,14(2):415.
[8]Lin J,Bai D,Xu R J,et al. TSBA-YOLO:an improved tea diseases detection model based on attention mechanisms and feature fusion[J]. Forests,2023,14(3):619.
[9]Chen J R,Kao S H,He H,et al. Run,dont walk:chasing higher FLOPS for faster neural networks[C]//2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).Vancouver,BC,Canada:IEEE,2023:12021-12031.
[10]Ouyang D L,He S,Zhang G Z,et al. Efficient multi-scale attention module with cross-spatial learning[C]//2023-2023 IEEE International Conference on Acoustics,Speech and Signal Processing (ICASSP).Rhodes Island,Greece.IEEE,2023:1-5.
[11]Tan M X,Pang R M,Le Q V.EfficientDet:scalable and efficient object detection[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle,WA,USA:IEEE,2020:10781-10790.
[12]Redmon J,Divvala S,Girshick R,et al. You only look once:unified,real-time object detection[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Las Vegas,NV,USA:IEEE,2016:779-788.
[13]Redmon J,Farhadi A. YOLO 9000:better,faster,stronger[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Honolulu,HI,USA:IEEE,2017:6517-6525.
[14]Redmon J,Farhadi A. YOLO v3:an incremental improvement[EB/OL]. (2018-04-08)[2023-09-01].http://arxiv.org/abs/1804.02767.
[15]Bochkovskiy A,Wang C Y,Liao H Y M. YOLO v4:optimal speed and accuracy of object detection[EB/OL]. (2020-04-23)[2023-09-01]. http://arxiv.org/abs/2004.10934.
[16]Ge Z,Liu S T,Wang F,et al. YOLOX:exceeding YOLO series in 2021[EB/OL]. (2021-07-18)[2023-09-01]. http://arxiv.org/abs/2107.08430.
[17]Li C Y,Li L L,Jiang H L,et al. YOLO v6:a single-stage object detection framework for industrial applications[EB/OL]. (2022-09-07)[2023-09-01]. https://arxiv.org/abs/2209.02976.
[18]Wang C Y,Bochkovskiy A,Liao H Y M. YOLO v7:trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]//2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).Vancouver,BC,Canada:IEEE,2023:7464-7475.
[19]Xu X Z,Jiang Y Q,Chen W H,et al. DAMO-YOLO:a report on real-time object detection design[EB/OL]. (2022-11-23)[2023-09-01]. http://arxiv.org/abs/2211.15444.
[20]Xiao J,Zhao T,Yao Y,et al. Chen,Y. Context augmentation and feature refinement network for tiny object detection[C]//Proceedings of the ICLR 2022 Conference. Virtual,2022:25-29.
[21]Ren S,He K,Girshick R,et al. Faster R-CNN:towards real-time object detection with region proposal networks[J]. IEEE Trans Pattern Anal Mach Intell,2017,39(6):1137-1149.