
新型加速器治療床電控設計
2024-10-21 00:00:00李兵鞠晶馮云劉曙光榮怡平
今日自動化 2024年4期

[摘 要]加速器治療床廣泛應用于腫瘤放射治療。目前我國加速器治療床的控制方法不夠完善,控制精度較低。文章介紹了一種新型加速器治療床電控系統的設計,采用高精度采集位置信息、閉環控制電機運轉的方法,具有運行平穩、操作方便、位置可視及控制精度高等優點。
[關鍵詞]加速器治療床;閉環;高精度
[中圖分類號]TG527 [文獻標志碼]A [文章編號]2095–6487(2024)04–0058–03
自動弧度治療功能是加速器治療床的重要功能之一。為了保證自動弧度治療功能的實現,需要對加速器治療床實現精確的位置控制,保證加速器治療床運動到位。
目前的加速器治療床的到位精度較差,速度調節不靈活,容易受到干擾,異常狀態下保護措施有待提高,無法高質量完成自動弧度治療的任務。
文章介紹了一種高精度加速器治療床的控制系統設計,實時采集加速器治療床的位置信息,采用閉環控制方法,其中3 個方向通過直流無刷電機,1 個方向通過伺服電機,以此帶動加速器治療床的運動,具有控制精度高、運動平穩、可靠性高等優點。
1 控制方案
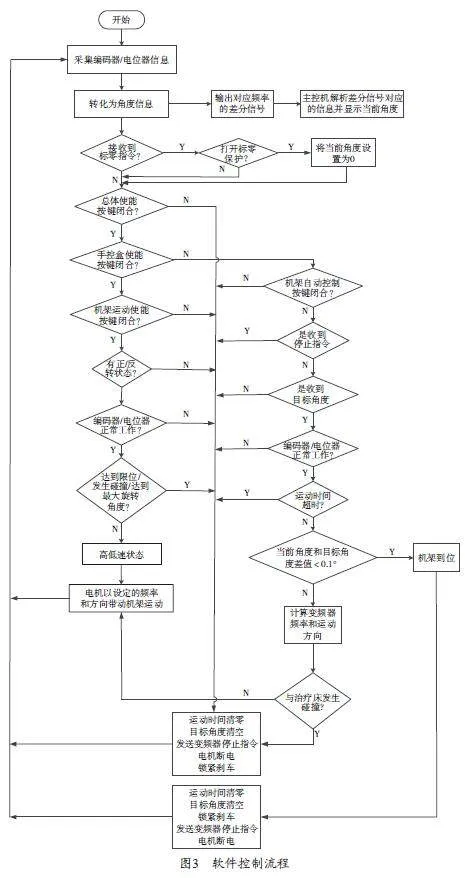
新型加速器治療床的結構設計如圖1 所示。新型加速器治療床的控制系統主要是對床面進行左右方向、前后方向、垂直方向及公轉方向的控制。每個方向安裝有電機、位置傳感器、剎車器等。
新型加速器治療床控制系統主要包括主控板、電機控制模塊、剎車控制模塊、位置傳感器采集模塊、旁控盒模塊、安全防控模塊和通訊模塊。如圖2 所示。
主控板是整個控制系統的核心,主要負責接收位置信息采集模塊反饋的位置信息,并接收上位機和旁控盒控制板的運動指令,然后發送指令給電機控制模塊和剎車控制模塊,從而控制電機的運動及剎車模塊的通斷。
旁控盒是位于加速器治療床兩側的操作盒,為了方便醫生操作,左右兩側分別有1 個旁控盒,2 個旁控盒設置有優先級,可以實現在單側或者兩側同時對床的擺位。每個旁控盒都有按鍵和顯示功能,通過和主控板之間的通信,實現對加速器治療床的運動控制,并且顯示加速器治療床的實時位置。
2 硬件電路設計
硬件電路采用模塊化設計,盡量采用較成熟的模塊電路,增加系統的可靠性。
2.1 旁控盒電路設計
旁控盒的主要功能是采集操作信息及顯示位置信息,包括運動使能按鍵、鎖定按鍵、床面電動手動切換按鍵、公轉電動手動切換按鍵、遙控本控切換按鍵,以及橫向、縱向、垂直方向和公轉方向的控制推桿。
控制推桿輸出0~5 V 電壓,旁控盒采集板通過AD(模– 數轉換電路)采集電路將推桿的操作信息采集到旁控盒的單片機,單片機通過采集到的電壓判斷運動方向和運動速度。
其他按鍵通過單片機采集高低電平控制各個開關量的狀態。
旁控盒通過4 個四位數碼管,分別顯示4 個方向的位置信息。
旁控盒和主控板之間采用RS485通信,將采集到的按鍵狀態發送至主控板。
考慮到結構的安裝方便性,每個旁控盒分為采集板和顯示板,靠接插件連接。采集板采集按鍵信息并與上位機通信,顯示板包含4 個四位數碼管和數碼管驅動芯片。
2.2 主控板電路設計
主控板通過兩路RS485 分別與2 個旁控盒和上位機通信、接收運動指令、采集限位信息和編碼器反饋的位置信息,并對當前的狀態及指令進行判斷,然后控制電機的運動停止,以及剎車、吸盤和離合器的通斷。以下僅對部分功能模塊作單獨介紹。
編碼器通過CAN 通信向主控板反饋位置信息,由于CAN 通信方便組網,4 個編碼器可以共用1 個單片機的CAN 通信口。
伺服電機控制器由單片機的脈沖輸出,并用ADUM1410 進行隔離,然后輸出給伺服電機驅動器。考慮到單片機的驅動能力,增加了MOS 驅動芯片TC4424 作為備用。對于伺服電機控制器的開啟、關閉接口,選用繼電器干接點輸出控制。
3 個直流無刷電機控制器通過PWM 控制。
剎車、離合及吸盤均由繼電器控制,通過繼電器的通斷使得用電模塊得電、失電,從而直接控制剎車、離合及吸盤。
3 軟件設計
3.1 軟件流程設計
軟件設計采用結構化程序設計方案,具有良好的模塊性、可修改性及可移植性。根據功能將軟件分成若干個功能相對獨立的模塊,包括通信模塊、數據采集模塊、邏輯判斷處理模塊、電機控制模塊等。
編碼器實時采集位置信息,反饋給主控板,用于電機控制和位置顯示。
防誤碰按鍵可增加治療床的安全性,當防誤碰按鍵開啟時,旁控盒上的其他所有按鍵保持現有的狀態,4 個方向的運動推桿輸出信號為中位信號。
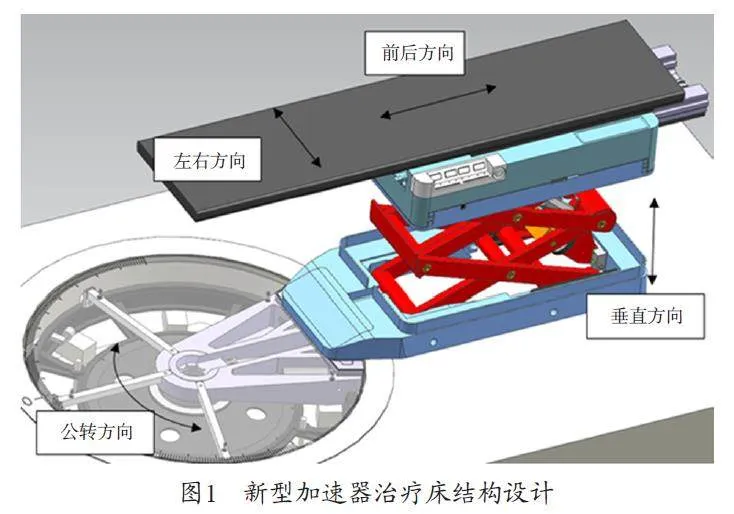
床面手動電動按鍵及公轉手動電動按鍵,可以實現對治療床相應方向的手動和電動之間的切換。垂直方向受重力影響,結構設計只能由電機帶動,所以垂直方向只有電動控制,沒有手動控制。軟件控制流程如圖3 所示。
通過遙控本控切換按鍵切換遙控、本控狀態。
處于本控狀態時,通過旁控盒的推桿和使能按鍵控制床面的運動和停止,通過旁控盒推桿的推動力度調節本控狀態下的運動速度。
處于遙控狀態時,通過上位機給主控板發送目標位置,每個方向的目標位置和運動相互獨立,根據目標位置、當前位置及當前速度,通過PID 計算出治療床所需的運動方向和速度,從而實現治療床的高精度運動控制。
3.2 軟件模塊設計
精度控制主要包括顯示精度和控制精度。顯示精度取決于編碼器采集信息的準確性,而控制精度則要求較高,當主控板發送停止指令后,治療床由于運動慣性,并不會停止在發送指令的位置。
處于本控狀態時,當松開調速推桿或者松開使能按鍵時,不同的運動速度因為慣性向前運動的距離不同,如果僅考慮盡可能接近停止操作時的位置,則可以收到指令后立即發送停止指令,這樣能盡可能地減小緩沖位移,但是實際工程中,立即停止勢必會讓病人有較強烈的沖擊感,所以根據實際調試情況,在滿足1.1 運動要求的條件時,盡可能緩慢停止,增加病人的舒適度。
處于遙控狀態時,上位機發送目標角度,實際停止位置和目標角度的差值應滿足精度要求,所以在接近目標角度時,運動速度要盡可能低,但是速度太低會影響治療床的使用便利性,因此根據實際情況,對治療床進行大量實驗,判斷各個角度下到目標角度所需的速度,當離目標角度較遠時,采用高速運動,當接近目標角度時,逐步降低速度,使治療床既準確又平穩地運動。經過實際調試,各直線運動精度小于1 mm,旋轉精度小于0.5°。
4 結束語
通過對編碼器、電機等參數進行對比分析,進行模塊化的電路設計和軟件設計,通過實時采集位置信息,對治療床進行閉環控制。通過理論計算和現場對實際情況進行驗證,最終實現了治療床的穩定、精確、可靠的運動控制。文中設計的電控系統滿足設計要求,并且完成了現場調試,后期可批量應用。
參考文獻
[1] 李啟丙,王洪. 非連續大氣偏振觀測精密控制系統設計[J]. 計算技術與自動化,2017,36(4):18-22.
[2] 李洪文. 基于內模PID 控制的大型望遠鏡伺服系統[J]. 光學精密工程,2009,17(2):327-332.
