
基于GPS和視覺模型的麥克納姆輪三角架警示車
2024-10-21 00:00:00周瑾申志宇吳波肖艷白雪婧
今日自動化 2024年4期
[摘 要]為了避免駕駛員因擺放三角架而遇見危險,一種遙控的基于GPS 和視覺模型及聲光報警系統(tǒng)的自主導航三角架警示車十分重要。文章對三角架的使用現(xiàn)狀進行了分析,并提出了改進方案,達到了駕駛員手動遙控或開啟自動導航就能使警示車自動到達固定位置并一鍵返航的效果,解決了高速公路上存在的安全隱患,較好地保障了駕駛員和后方車輛的安全。
[關(guān)鍵詞]機器人控制;慣性導航;視覺模型;麥克納姆輪
[中圖分類號]TP29 [文獻標志碼]A [文章編號]2095–6487(2024)04–0158–03
隨著經(jīng)濟的發(fā)展,汽車不斷普及,與此同時汽車故障也頻繁發(fā)生。在故障發(fā)生時,人們需要在車輛后方設(shè)置三角架以警示后來車輛。我國《道路交通法》第68 條規(guī)定,機動車在高速公路上發(fā)生故障時,警告標志應當設(shè)置在故障車來車方向150 m 以外,晚上則放置在250 m 以外。車上人員應當迅速轉(zhuǎn)到右側(cè)路肩上或應急車道內(nèi),并且迅速報警。目前大眾所用三角架僅是一個普通的反光標志,在雨天、霧天這些惡劣的天氣及夜晚都不夠清晰。若車輛發(fā)生故障,駕駛員需要將三角架放置到距故障車輛很遠的位置,而駕駛員徒步行走放置三角架不僅耽誤維修,還充滿危險,故障處理時間的延長必然存在安全隱患。因此,研究一款具有聲光報警功能的遙控三角警示車,可大幅降低追尾等安全事故的發(fā)生率。
1 普通三角架的應用現(xiàn)狀
1.1 擺放距離問題
很多情況下,車主在行進過程中出現(xiàn)故障緊急泊車后,只將警示牌放置于距車很近的位置,大部分三角架幾乎就放置在距車尾幾米處,高速行駛的汽車很難注意到,等到發(fā)現(xiàn)時也因距離過短而無法及時反應,導致發(fā)生事故。
1.2 擺放過程問題
大部分三角架都被車主放置于后備箱中甚至要掀開隔物板才能拿到,在行進過程中汽車出現(xiàn)問題緊急停泊時,車主需要先停車,再打開后備箱取出三角架擺放,這一過程中存在風險。有些車主可能會在馬路中央行走,這樣極易造成二次事故的發(fā)生。
1.3 警示牌本身材料問題
市面上大部分警示牌都為了便于攜帶而做的很小巧,又是依靠面板上的反光材料起作用。為壓縮成本提高利益,一些商家會在反光材料上偷工減料,導致反光性能達不到標準,如果天氣情況惡劣,不合格的反光材料會大幅增加二次事故發(fā)生的可能性。
2 三角架優(yōu)化思路
2.1 駕駛員手動遙控操作擺放
可遙控三角架是依靠三角架體內(nèi)基于IMXRT1064 控制板控制的智能小車行走的。當意外發(fā)生時,駕駛員無需冒著風險親自擺放,只需呆在安全的地方用遙控器對警示車進行操控,就可使其自動前進后退轉(zhuǎn)彎直至擺放于合適位置。
2.2 增加信息收集能力
在高速公路發(fā)生意外事故時,現(xiàn)場信息十分重要,若出現(xiàn)傷者則救援刻不容緩。小車在自動擺放的同時,可對周圍情況進行記錄并上傳至交警部門及交管平臺,幫助警察更好地了解現(xiàn)場情況并出警,也提醒了其他司機。駕駛員可通過視頻觀察車輛后方情況。
2.3 利用傳感技術(shù),智能分析擺放
若事故發(fā)生時情況緊急,駕駛員無法遙控其擺放,可以選擇讓警示車智能擺放。警示車在Jetson Orinnano 主板和各種傳感器的基礎(chǔ)上通過結(jié)合視覺模型、GPS、慣性導航為一體的導航系統(tǒng),自動導航和判斷擺放地點。
其中,慣性導航是一種基于牛頓力學定律的自主式導航技術(shù),其先測量運動載體的加速度,再通過積分運算獲得載體速度和位置數(shù)據(jù)。這種導航系統(tǒng)不依賴于外部信息,也不向外部輻射能量,因此具有較高的隱蔽性和可靠性。慣性導航的核心組成部分是陀螺儀和加速計組成的慣性測量單元(IMU),其中陀螺儀用于測量載體姿態(tài)角和角速度的變化,而加速度計則用于測量平移運動的加速度。通過這些數(shù)據(jù)的處理,可以獲得警示車相對于初始位置的定位信息,包括速度、位置、姿態(tài)和航向等參數(shù)。
而視覺模型是一種利用深度學習技術(shù)來進行圖像或視頻處理的算法模型。視覺模型的基本原理是將圖像或視頻作為輸入,經(jīng)過一系列的卷積、池化、全連接等操作,最終得到對圖像的分類、定位、分割等結(jié)果。其中,卷積操作可以有效提取圖像的特征信息,池化操作可以減小圖像的空間尺寸,全連接操作可以將特征與類別進行關(guān)聯(lián)。通過視覺模型可以實現(xiàn)警示車自動對周圍環(huán)境進行分析判斷。同時聲光報警也自動開啟,利用紅外將周圍可視化,有物體靠近時,小車自動測距并將其與預設(shè)安全距離比較,同時發(fā)出刺耳的鳴笛、刺眼的快頻閃爍紅光,警示后來車輛。
2.4 光源設(shè)計
將彩燈燈條嵌入三角架內(nèi),利用freertos 操作系統(tǒng)對燈光進行左右控制,提示后來車輛左右變道。也可以根據(jù)天氣調(diào)節(jié)燈光的亮度顏色,防止天氣惡劣導致后來車輛看不見小車具體位置。這樣的設(shè)計比起只有反光材料的普通三角架安全性大幅提高。
3 自動聲光警示車的設(shè)計方案
3.1 機械運動結(jié)構(gòu)硬件設(shè)計
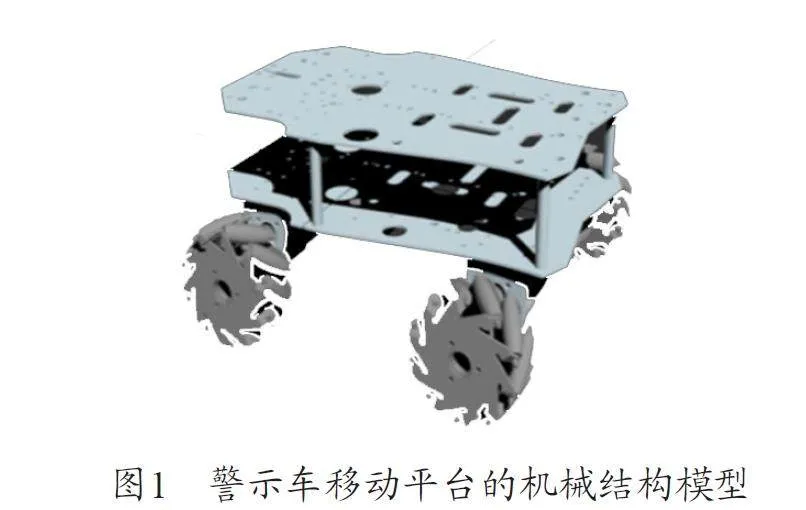
警示車移動平臺的主要結(jié)構(gòu)由麥克納姆輪、直流減速電機、控制器、車架、三角架警示標志組成。警示車移動平臺的機械結(jié)構(gòu)模型如圖1 所示。其中警示標志是國家標準機動車用三角警示牌,是由塑料反光材料做成的被動反光體,駕駛員在路上遇到突發(fā)情況時,利用三角警示牌的回復反光性能,可以提醒其他車輛避讓,以免發(fā)生二次事故。底盤部分由車輪和車架組成。車輪部分采用了麥克納姆輪這種可以全方位移動的金屬車輪,其移動方式基于一個有許多位于機輪周邊的輪軸的中心輪,這些成角度的周邊輪軸將一部分的機輪轉(zhuǎn)向力轉(zhuǎn)化到一個機輪法向力上面。4 個車輪連著4 個電機,通過電機控制警示車各方向運動。車架采用全金屬加工,相比普通車架壽命更長,精度更高。
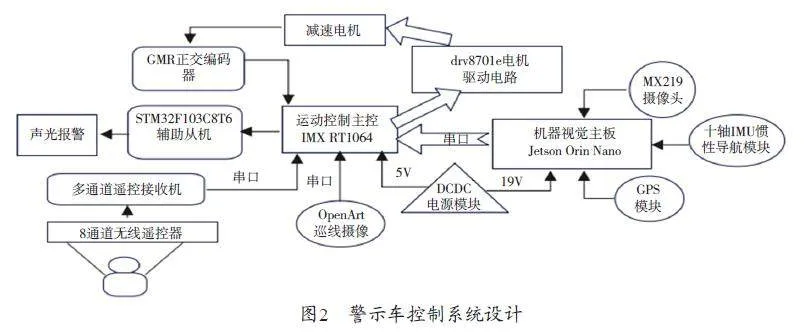
3.2 警示車控制系統(tǒng)設(shè)計
警示車控制系統(tǒng)設(shè)計如圖2 所示,主要由運動控制、聲光報警、傳感器、人員操作等部分組成。運動控制部分由運動控制主板、電機驅(qū)動板、多通道遙控接收機組成;聲光報警部分由從機微控制器、彩燈燈條和喇叭組成;傳感器部分由OpenART 攝像頭、IMU 慣導傳感器、GPS 模塊組成;人員操作部分由8通道無線遙控器組成。根據(jù)試驗的需要,對警示車各個部件使用的硬件選型如下。
(1)警示車主控采用Jetson Orin Nano 主板。主控電路主要用來采集GPS 模塊和慣性導航模塊數(shù)據(jù)、攝像頭視頻處理、慣性導航的數(shù)據(jù)融合、運動決策算法運算、運行目標檢測模型等高層機器人應用程序。采用Jetson Orin Anno 是因為其性能強大,適合運行目標檢測模型、圖像處理及各種數(shù)據(jù)融合算法。并且其擁有CUDA 加速,可以適用更大型、更負責的深度神經(jīng)網(wǎng)絡(luò)。
(2)警示車運動控制器采用IMX RT1064 控制板。這款是恩智浦公司的控制器, 內(nèi)核是Cortex–A7,600 M 主頻,可十分迅速地中斷響應,非常適用于機器人的運動控制。在該項目警示車上用于接收無線遙控裝置的指令信號數(shù)據(jù)并解析,進而控制麥克納姆輪各種形式的運動。此控制器的高實時響應速度和高性能可以讓警示車底層運動方面發(fā)揮非常好的表現(xiàn)。
(3)警示車聲光報警部分采用STM32F103 控制板。這部分采用STM32F103C8T6芯片的最小系統(tǒng)板,內(nèi)核是Cortex–M3,采用ARM V7架構(gòu),是集成高性能、低成本、低功耗的常用嵌入式解決方案。在該系統(tǒng)中使用freertos 作為操作系統(tǒng),控制各種報警燈光變換和報警聲音變換,實現(xiàn)多場景應用的報警和警示功能。
(4)警示車采用12V 帶GMR 編碼器的直流減速電機,扭矩大,適合各種地形如上坡、下坡等。電機驅(qū)動選用TI 公司的驅(qū)動芯片drv8701e,具有驅(qū)動能力強、過流保護、過熱保護等特點。
(5) 警示車上配備openART 視覺攝像頭, 其自帶RTT 操作系統(tǒng),支持openmv IDE 開發(fā),支持openmv 機器視覺庫,可使用多種視覺處理算法。還有IMX219 攝像頭,作為目標檢測模型的圖像輸入。IMU 慣導模塊和GPS 滿足警示車導航算法的要求。
4 結(jié)束語
文章研發(fā)的遙控聲光三角架警示車可以解決普通三角架存在的安全隱患,避免二次事故的發(fā)生,也可以大幅縮短駕駛員為放置三角架而在事故發(fā)生地段停留的時間,提高了其安全性。該智能警示車有手動、自動控制兩種模式,可以自動回收放置,在駕駛員無法操控的情況下仍可以自主擺放,對路況進行實時監(jiān)控,十分人性化。其制造成本低,功能明確可靠,同時便于攜帶,具有較廣闊的應用前景。
參考文獻
[1] 吳正華,常強,吳博龍. 淺談慣性技術(shù)在炮兵作戰(zhàn)中的運用[J]. 科技創(chuàng)新導報,2011(5):245.
[2] 孫國娣,王亮,潘靜娟. 智能自動測距聲光報警信標燈的研制與應用[J]. 電力安全技術(shù),2016,18(12):38-40.
[3] 張業(yè)明,陳江雪. 基于安卓和單片機的智能公路警示器[J].傳感器與微系統(tǒng),2016,35(4):93-96.
[4] 周航,朱翰宸,李園園. 基于麥克納姆輪的擺式懸掛系統(tǒng)設(shè)計及其運動學分析[J]. 電子制作,2020(9):65-67.
